衛星地球站電磁環境噪聲的自動化測試設計
2023-02-03 02:56:10沈小青
自動化儀表 2023年1期
夏 偉,沈小青,施 柳,王 玨
(1.中國衛星海上測控部,江蘇 江陰 214431;中鐵上海局有限公司,上海 200434)
0 引言
電磁環境可控是衛星地球站設備正常工作的必要前提。信噪比是衡量通信接收機能否準確接收解調信號的關鍵指標。因此,各種噪聲對系統的影響成為亟待研究和解決的問題[1-3]。相關研究表明,大氣損耗每增加1 dB,噪聲溫度就會相應增加55 K。對于衛星通信系統,天線噪聲溫度約為60 K,低噪聲放大器等效噪聲溫度約為50 K。因此,參考系統自身噪聲溫度門限,外部電磁環境的噪聲估算偏差將會對系統實際性能的準確評估產生明顯影響[4-5]。除大氣損耗噪聲以外,外部環境還包括雨霧、太陽、黑體和銀河系等多種背景噪聲。這些背景噪聲在特定條件下都會對衛星通信系統鏈路產生影響。尤其是在深空探測應用中,外部環境噪聲的測量與計算將成為深空衛星通信系統設計的重要參考依據。因此,開展電磁環境噪聲的監測技術研究具有重要意義[6-9]。
針對上述問題,本文借鑒微波噪聲Y系數測量原理,構建了天線輸出端等效噪聲溫度測量模型,并對測量模型進行了不確定度評定。在此基礎上,通過Excel軟件和VBA編程完成了電磁環境噪聲的自動化測試設計,并通過監測試驗對測量效果進行了驗證。
1 電磁環境噪聲的測試原理
目前,電磁環境噪聲測試方法主要參考技術規范為GB 13615—2009《地球站電磁環境保護要求》。電磁環境噪聲測試原理如圖1所示。
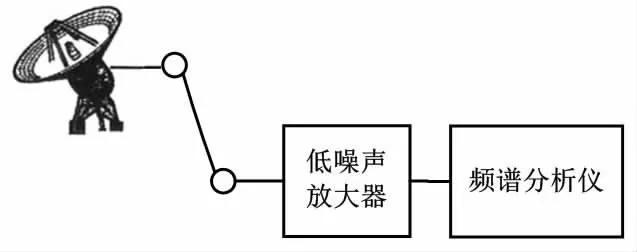
圖1 電磁環境噪聲測試原理圖
根據無線電噪聲測量原理,電磁環境噪聲測試方法在較低功率噪聲條件下,存在測試結果可靠性不高的問題。產生該問題的原因是當干擾噪聲功率較小時,測試系統中測試天線、低噪聲放大器和頻譜分析儀自身引入的噪聲影響難以消除,從而對測量結果產生明顯影響[10]。
為解決上述問題,本文提出一種基于Y系數法的電磁環境噪聲測試方法。基于Y系數法的電磁環境噪聲測試原理如圖2所示。
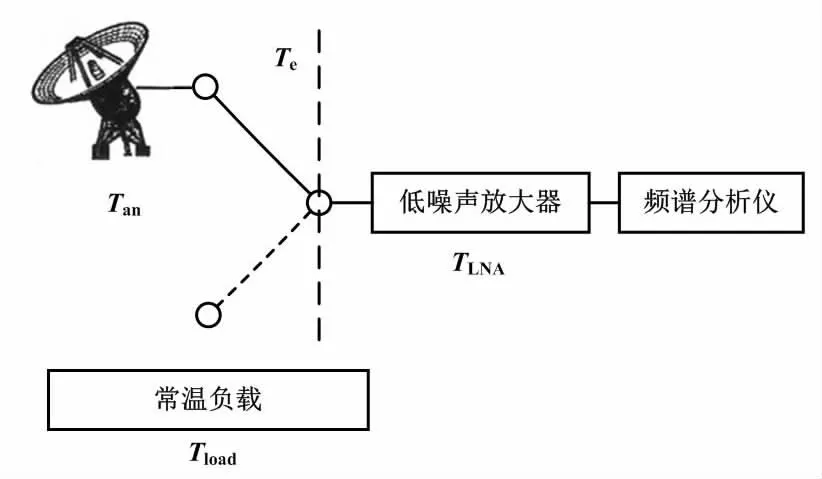
圖2 基于Y系數法的電磁環境噪聲測試原理圖
如圖2所示,當低噪聲放大器輸入端接天線時,頻譜分析儀測得的噪聲功率為:
Nant=kBG(Tan+Te)
(1)
式中:Nant為系統熱態噪聲功率;k為玻爾茲曼常數,k=1.380 649×10 J/K;B為系統帶寬;G為放大器增益;Tan為天線等效輸出噪聲溫度;Te為接收機等效噪聲溫度。
當低噪聲放大器輸入端接常溫負載時,頻譜分析儀測得的噪聲功率為:
Nload=kBG(Tload+Te)
(2)
式中:Nload為系統冷態噪聲功率;Tload為常溫負載噪聲溫度。
根據Y系數的噪聲測量原理,可得:
(3)
通過式(3)即可得天線等效輸出噪聲溫度的測量模型:
Tan=Y(Tload+Te)-Te
(4)
接收機等效輸入噪聲溫度測試原理如圖3所示。天線輸出端主要設備包括低噪聲放大器、衰減器以及測試頻譜儀。
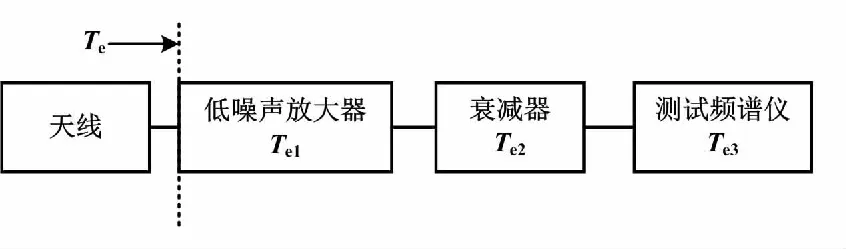
圖3 接收機等效輸入噪聲溫度測試原理圖
接收機等效輸入噪聲溫度Te可表示為:
kBGATe=kBGATe1+kBATe2+kBTe3
(5)
式中:Te1為放大器等效輸入噪聲溫度;Te2為衰減器等效輸入噪聲溫度;A為衰減;Te3為頻譜儀等效輸入噪聲溫度。
則有:
(6)
對于電磁環境噪聲測量應用,噪聲信號通常都很微弱。因此,G較大而A較小。則式(6)后兩項可忽略。故Te主要由Te1決定,即Te≈Te1。
對于多個設備級聯的系統,若第一級的功率增益G很高,則Te可直接使用Te1估計,即Te1=TLNA。因此,天線輸出端等效噪聲溫度測量模型為:
Tan=Y(Tload+TLNA)-TLNA
(7)
式中:TLNA為低噪聲放大器噪聲溫度。
2 電磁環境噪聲的測量不確定度
在物理量的實際測量中,無論是直接測量還是間接測量,由于測量儀器、方法以及外界條件的影響等因素的限制,使得測量值與真實值之間存在差值。為了實現對測量結果的準確度和可靠性評估,有必要對測量不確定度進行分析。測量不確定度定義為:與測量結果相關聯的參數,表征合理地賦予被測量值的分散性。為便于表述,一般以u表示不確定度分量、uc表示合成標準不確定度。
由天線輸出端等效噪聲溫度測量模型可知,不確定度測量屬于間接測量,且各輸入量之間互不相關。則根據不確定度傳播規律,輸出量的合成標準不確定度為:

(8)
通過偏導數,求得:
(9)
(10)

(11)
式中:u(Nant)為頻譜儀信號功率的測量標準不確定度。
當使用對數單位表示時,Y=Nant-Nload。
由于使用同一臺頻譜儀測得Nload和Nant,因此兩者相等,即u2(Nload)=u2(Nant)。則:
(12)
以德國R&S公司FSV頻譜儀為例,其刻度線性度引入的標準偏差為0.03 dB,則其相對電平測量的標準不確定度為u(Nant)=0.03 dB。

對數單位換算為線性單位,則有u(Y)≈1.0%。把上述分量代入式(8),可得電磁環境噪聲測量標準不確定度為:
uc(Tan)≈
(13)
3 電磁環境噪聲的自動化測試設計
電磁環境噪聲測試在地球站的選址和日常維護中都有應用。由于測試過程持續時間較長、測試數據較多,人工記錄存在測試效率低下的問題。因此,開展電磁環境噪聲的自動化測試對提高測試效率具有積極意義[11-13]。根據第1節電磁環境噪聲的測試原理,自動化測試系統包括自動化測試流程設計,以及噪聲數據和天線指向查詢處理兩個方面。
這些測試程序基于Excel軟件和VBA編程實現。儀器驅動選擇Agilent IO Libraries Suite。
(1)自動化測試流程設計。
自動化測試主要完成電磁環境噪聲信號的采集。自動化測試流程如圖4所示。
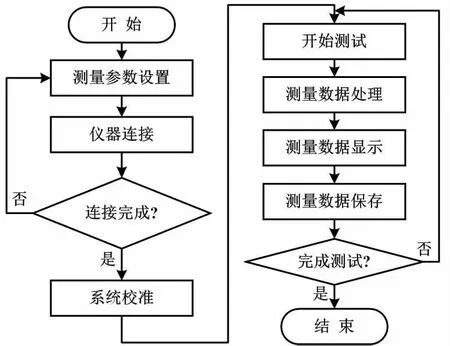
圖4 自動化測試流程圖
①系統連接。系統連接主要完成測試計算機和測試儀器的總線連接,并對系統測試參數進行初始化,包括測試頻率范圍、分辨率帶寬、參考電平和輸入衰減等參數。
②系統校準。系統校準主要完成系統冷態噪聲功率和負載溫度的測量,即低噪聲放大器輸入端接常溫負載時的噪聲功率。
③噪聲測試。噪聲測試主要完成天線在各個方向的系統熱態噪聲功率測量。由于該過程需動態調整天線指向,因此測試時間持續時間較長。
(2)噪聲數據和天線指向查詢處理。
由于天線伺服控制為獨立系統,在噪聲測試階段缺乏實時獲取天線方位俯仰數據的通信接口,只能通過事后查詢系統日志獲得。因此,需通過時間對齊把天線指向和噪聲數據進行關聯。噪聲數據和天線指向查詢流程如圖5所示。
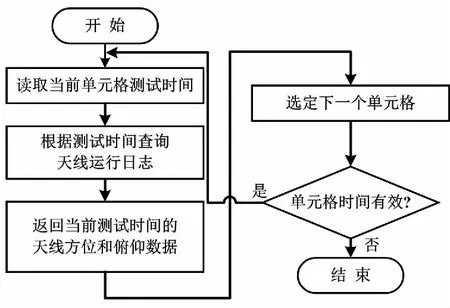
圖5 噪聲數據和天線指向查詢流程圖
4 電磁環境噪聲監測系統的測試驗證
為驗證電磁環境噪聲監測系統的性能,以某型衛星地球站設備為例,開展測試驗證試驗。其中,測試頻譜儀選擇R&S-FSV系列。地球站工作頻段為S頻段,中頻輸出中心頻率為70 MHz,帶寬為20 MHz。
首先,對電磁環境噪聲監測進行需求分析。電磁環境噪聲監測需求分析如表1所示。
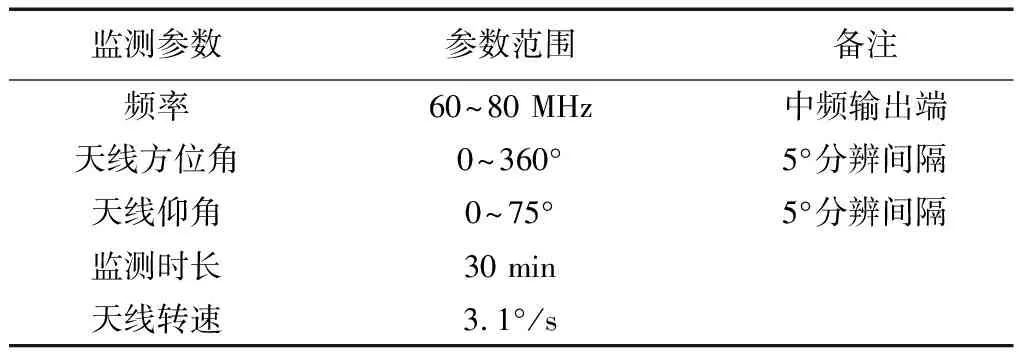
表1 電磁環境噪聲監測需求分析
其次,根據監測需求分析參數,開展電磁環境噪聲監測試驗。電磁環境噪聲監測主要包括電磁環境噪聲信號原始數據的采集,以及天線各方位俯仰條件下的環境噪聲溫度計算。電磁環境噪聲監測結果如表2所示。
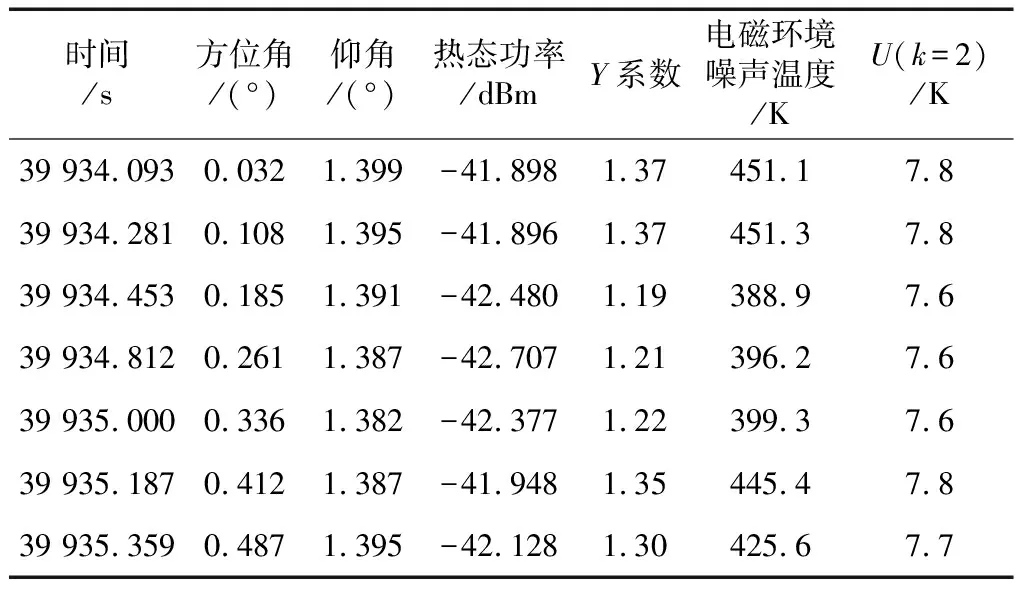
表2 電磁環境噪聲監測結果
①電磁環境噪聲溫度。
轉化為線性單位,則Y≈1.194 8。由表2可知,TLNA=45 K、Tload=318.5 K、Tan=1.194 8×(45+318.5)-45≈388.9 K。
②測量結果的擴展不確定度。
電磁環境噪聲測量標準不確定度為uc(Tan)≈3.8 K。
擴展不確定度為U=2uc(Tan)≈7.6 K,k=2。
③采樣速度和空間分辨間隔典型值分析。
電磁環境噪聲功率的采樣速度不低于5幀/s。當天線按3.1°/s速度轉動時,5°間隔過渡時間為1.6 s,可得5°分辨間隔內的噪聲采樣幀數為8幀,可以滿足一般測量重復性要求。進一步降低天線轉速,則可以實現空間分辨間隔≤5°。此時,監測時長也會相應增加。
5 結論
本文提出一種衛星地球站電磁環境噪聲的測試方法,通過計算機自動采集頻譜分析儀測量的噪聲功率值和天線運行軌跡,實現了地球站天線周邊空間電磁環境噪聲溫度的自動測量和不確定度評估。與標準規范推薦方法相比,由Y系數法噪聲測量原理可知,本文所述方法可以去除低噪聲放大器和頻譜分析儀自身噪聲對測量結果的影響,對于提高低噪聲條件下的電磁環境噪聲功率測量準確度具有積極意義。通過對實測過程中影響測量結果的不確定度分量進行評估,給出了電磁環境噪聲溫度監測結果的不確定度評定方法。試驗結果表明,在噪聲功率采樣速度≥5幀/s、空間監測分辨間隔≤5°的條件下,系統電磁環境噪聲的測量不確定度urel=2.0%,k=2。該研究對于電磁環境噪聲的監測質量評估具有借鑒意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
