隱性擾動下柔性作業車間重調度決策*
2023-02-03 01:54:28宋李俊徐志鵬
制造技術與機床 2023年1期
宋李俊 徐志鵬 李 斐
(①重慶理工大學機械工程學院,重慶 400054;②中冶賽迪工程技術股份有限公司,重慶 400013)
柔性作業車間中的隱性擾動具有多變性和復雜性的特點,例如操作時間偏差、工件到達時間不準等隱性擾動以累積的形式存在,由于工序之間聯系密切,導致這種擾動累積問題更加復雜。短時間的隱性擾動累積一般對生產計劃影響較小,但當擾動累積到一定程度就會使當前加工情況嚴重偏離原調度計劃,此時需要進行重調度[1]。由于隱性擾動重調度界限不明確,會出現誤調度和調度不及時的情況,使企業遭受損失。因此,重調度時刻點的確定是解決隱性擾動下的重調度問題的關鍵之一。同時,當擾動發生后,選擇合適的重調度方式也是重調度問題中不可缺少的一環。
為了明確重調度的界限,劉明周等[2]將擾動分為顯性擾動和隱性擾動兩類,以分析車間中隨機擾動引起的不確定性問題。一般來說顯性擾動對于原調度方案的影響較大,極易觸發重調度;而隱性擾動的影響較小,不易觸發重調度。目前對隱性擾動的研究較少[1-4],其難點之一是由于隱性擾動的累加特性導致重調度界限難以確定,所以尋求有效的方法界定隱性擾動累積情況下的重調度界限是十分必要的。
改革開放40年間,茅臺集團無論是酒產量、銷售收入還是公司總資產都得到了驚人的發展。40年茅臺的發展是所有茅臺人汗水的結晶,也給了消費者一份滿意的答卷。
關于隱性擾動重調度時刻點的確定,吳定會等[4]針對隱性擾動累積下的車間重調度問題,利用孿生網絡建立擾動檢測模型,以實時數據為輸入,實現重調度的啟動時刻的判定。Haruhiko Suwa[5]針對在線調度中何時觸發重調度的問題,提出了一種基于累積延遲的重調度策略,綜合了周期性重調度和事件驅動型重調度的特點。Can Akkan[6]深入了解了預調度的魯棒性特征,在隱性擾動觸發重調度決策上選用被動觸發式重調度驅動原則。但現有重調度時刻點的研究多數加入了模糊數學的思想,沒有嚴格的明確各種擾動情況下的重調度時刻點,導致在某些特定情況下重調度時刻點確定的不夠準確,造成損失。
重調度時刻點確定后需要對重調度方式進行決策。金鵬博等[7]針對柔性作業車間中的機器故障問題,提出一種重調度方式決策模型,快速、高效地估計出最優重調度方式。李玉等[8]針對作業中不確定事件及信息不對稱等問題,提出一種基于數字孿生的動態調度方法。宋李俊[9]針對動態環境下的柔性作業車間,基于滾動時域優化基本框架,設計一種周期和事件混合的動態調度策略。廖怡娜等[10]為解決調度中出現的作業返工而導致計劃中斷問題,提出一種前瞻性反應式調度算法。湯洪濤等[11]為提高柔性作業車間動態調度對擾動的實時響應能力,根據工業大數據特點,提出相關歷史數據中挖掘調度規則的方法。由于3種重調度方式執行起來效果不一,故需要通過多方面進行評價選擇。
為此,本文分析了柔性作業車間各工序之間的關聯性,在不超出各工件交貨期的前提下,確定了擾動累積條件下的重調度時刻點。基于遺傳算法設計了3種重調度方式的程序,并建立了重調度方式決策模型,對重調度方案進行選擇。
1 問題描述
柔性作業車間調度問題(flexible Job-shop scheduling problem, FJSP)是在傳統的作業車間調度問題(job-shop scheduling problem, JSP)上增加了為工序分配機器的操作[12]。與JSP相比,FJSP更具有靈活性,其主要特點為一臺機器可以加工多種工序,一道工序也可選擇不同機器進行加工。FJSP相較于JSP更貼合當代生產實際,同時其工序、機器之間的聯系也更加復雜。
法律中幸福人的預設背后是一種面向生活世界的思維,寄涵著法律對人類理想生活狀況的關懷,它真摯關注每個個體的幸福,同時也構設理想的生活方式,以令人滿意的法律方式來實現以“人的生活”為終極關懷,即人之優良幸福的生活。“一切有生命和愛的生物、一切生存著的和希望生存的生物之最基本的和最原始的活動就是對幸福的追求。人也同其他一切有感覺的生物一樣,他所進行的任何一種意志活動,他的任何一種追求也都是對幸福的追求。”[10]29我們都確然渴望幸福地生活,追求幸福是我們行動的動力和終極目的。
經典調度問題的研究建立在理想的靜態條件下,然而在實際生產過程中,各種不確定擾動的發生會打亂原定的生產計劃,所以對于動態柔性作業車間調度問題的研究也更有意義[13]。現如今對動態調度問題的研究多數在于對算法的改進,而未考慮到是否需要進行重調度以及采用何種方式進行重調度,所以本文針對重調度時刻點和重調度方式選擇進行了研究。
1.1 工序間的動態關聯性
在柔性作業車間生產中,眾多工序間的聯系繁雜,當某一工序發生擾動時,往往導致多道工序受到影響。圖1展現了調度方案的動態關聯性[14],并描述了在某一工序發生擾動時所帶來的聯動影響。

圖1 調度方案的動態關聯性
當O201發生擾動時,直接影響兩道工序O202和O302,從而間接影響工序O203、O402、O303、O103。可以明顯看出,每道工序最多直接影響兩道工序,即機器上的后一緊鄰工序以及該工件的下一緊鄰工序。本文將這兩種影響歸納為兩個維度的影響,即機器維度和工件維度。
1.2 問題假設
①同一工件的加工順序固定。
②不同工件的任意工序之間無順序聯系。
③每道工序同一時刻只能在1臺機器上加工。
④每臺機器同一時刻只能加工1道工序。
⑤不同工件的工序之間加工優先級相同。
⑥同一工序在不同機器上的加工時間可以不相同。
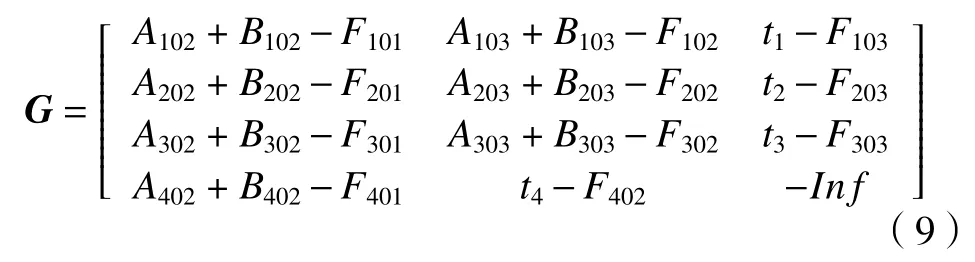
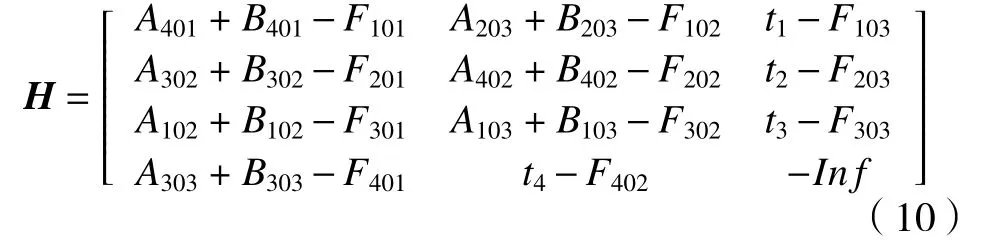
由于缺少工序A403,故“ -Inf”作為缺省標記,以便于在保證矩陣在運算過程中,該位置處的值一直為負無窮。
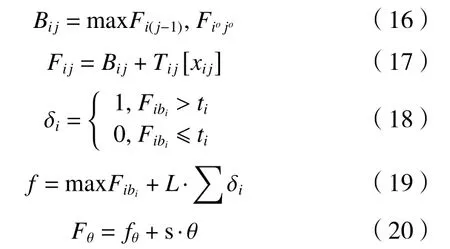
某生產線由n臺機器組成,假設生產中需要對a個工件進行加工,第i個工件有bi道工序,主要參數見表1和表2。
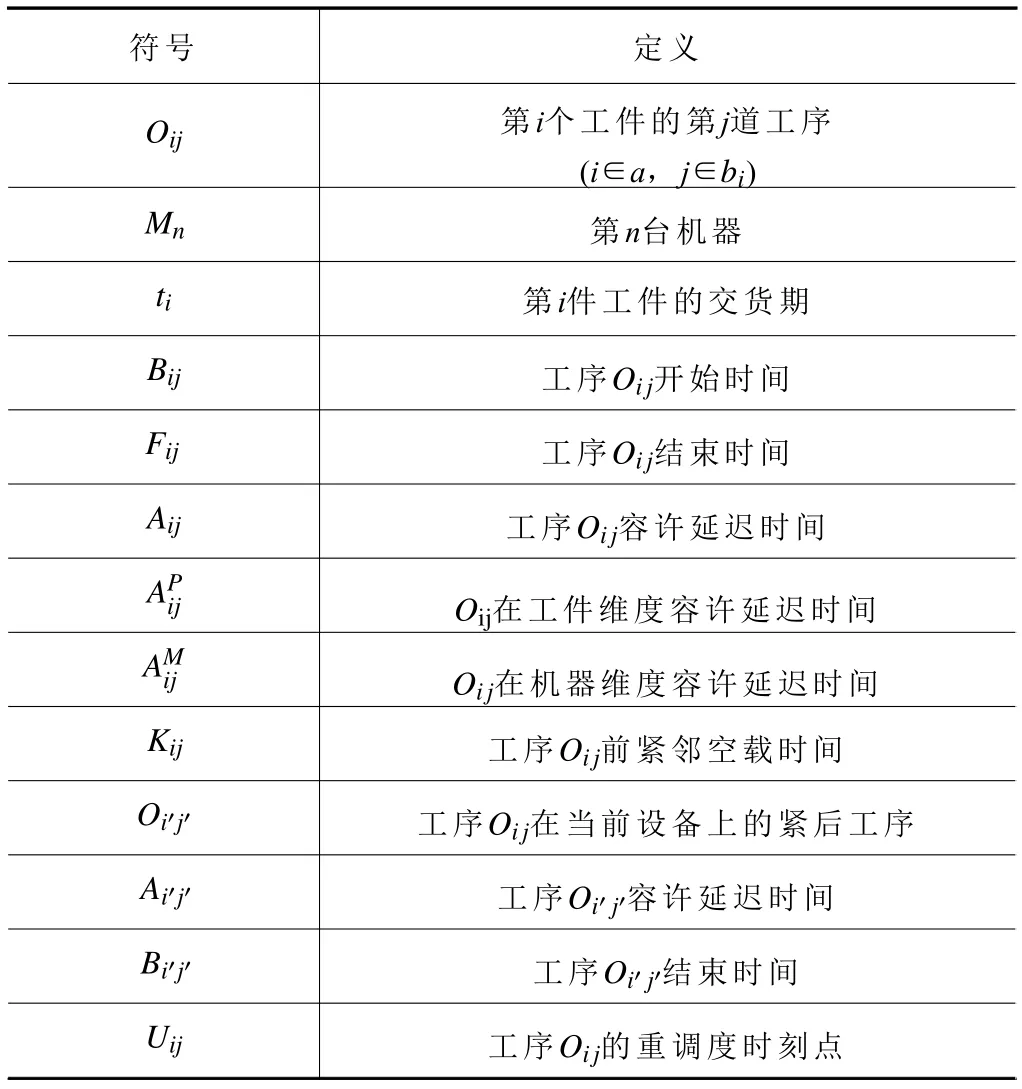
表1 柔性作業車間參數
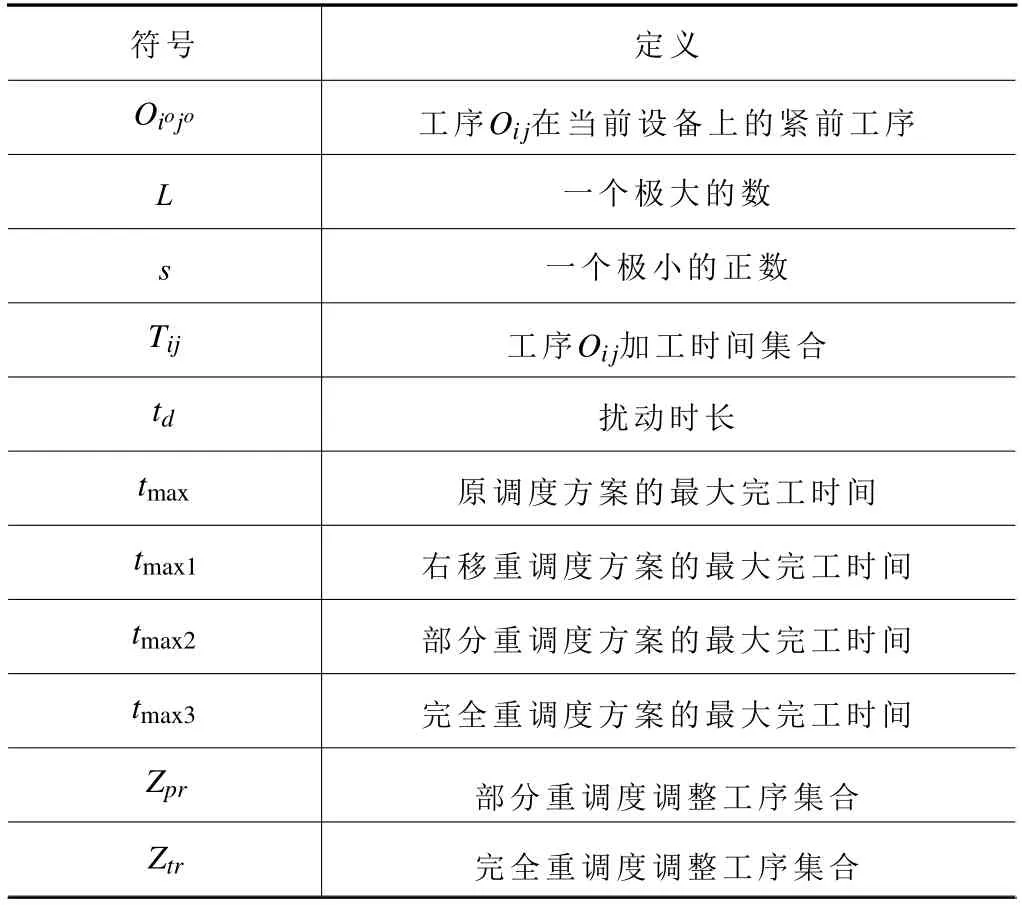
表2 重調度參數
2 重調度時刻點確定
柔性作業車間中發生的擾動,一般會降低原調度方案對實際生產的指導性能,此時一般需要對調度方案進行調整。應對擾動事件的調整主要體現在以下兩個層次:①不改變工序的加工順序及加工機器,且各工件不發生逾期完工的情況,適當的將某些工序進行延后(右移)排產,簡稱為右移調度。②在右移調度無法保證各工件如期完工的情況下,對某些工序重新安排,即重調度。所以,調度方案的調整可分為右移調度方法和重調度方法[14]。
本文針對柔性作業車間中的隱性擾動,以不超出各工件交貨期為限定條件(即不觸發重調度),不改變各工序的加工順序及加工設備,只對工序進行簡單的右移調度。目的是計算出各個工序最遲容許完工的時間點,并以此作為各工序觸發重調度的時刻點。
根據已有研究結果[3],按多元Logistic回歸模型中樣本容量的計算方法,利用2013年第五次國家衛生服務調查重慶農村地區的相關數據,失訪率為50%,計算樣本容量為270例。實際共抽糖尿病患者496例。利用Epidata錄入問卷調查數據,數據整理和分析采用統計工具軟件Stata 11.0。
2.1 重調度時刻點計算模型
當各工件的交貨期固定時,可以理解為每個工件的最后一道工序不可超出各自的交貨期,且所有工序在進行右移調度調整時也不能使任意工件超出交貨期。這樣在工件維度和機器維度上每道工序都會分別存在一個延遲完工時間的極限值。綜合各個工序兩個維度上的延遲完工時間極限值以及工序間的動態聯系,計算出每道工序的容許延遲時間Aij,最后求出每道工序所對應的重調度時刻點。

式(1)中 :uij為0-1變量,當工序Oij工件維度的下一道工序Oi(j+1)存在時為1,反之為0;同理,式(2)在工序Oij機器維度的下一道工序Oi′j′存在時,vij=1,反之vij=0;式(3)、(4)分別為工序Oij在工件維度和機器維度上的容許延遲時間,通過0-1變量u和v對不同情況進行界定;式(5)表示工序Oij的容許延遲時間,即兩個維度上容許延遲時間的最小值;式(6)中R代表所有工序的容許延遲時間;式(7)表示工序Oij的重調度時刻點。
由式(3)~(5)可以看出,在工序Oij兩個維度上的下一工序的容許延遲時間已知的情況下才能計算Aij,所以計算出所有工序的容許延遲時間R矩陣是一個循環倒序遍歷的過程,計算流程如圖2所示。
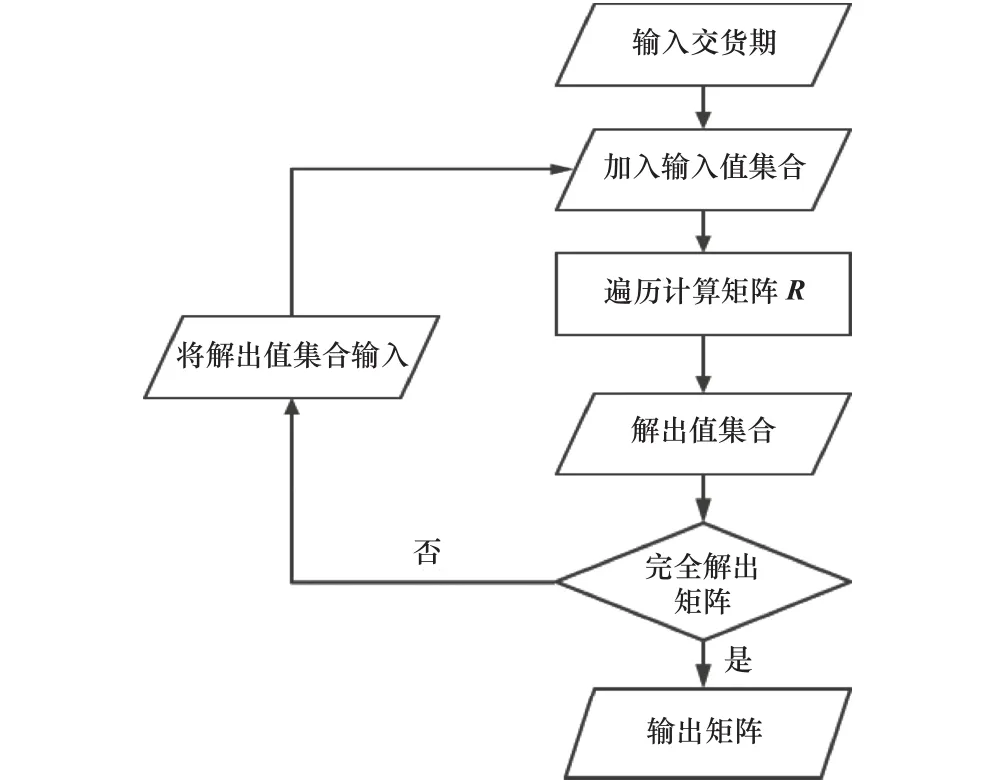
圖2 倒序遍歷計算流程圖
完全解出矩陣R后,由式(7)得出各工序的重調度時刻點。
2.2 重調度時刻點計算步驟
以圖1調度方案為例,欲計算出工序102的容許延遲時間,其兩個維度上的后序緊鄰工序為工序103和工序203。工序103和工序203的容許延遲時間分別為A103、A203,則工序102的容許延遲時間

(1)維度關系建立
①工件維度工序關聯矩陣G
游成令的事跡引起了市食品藥品監管系統的高度關注,市局領導親自慰問并組織捐款10萬余元,但高昂的治療費用,讓這個家庭根本無法承受。無奈之下,游成令丈夫在網上發表“一歲半女兒身患白血病,求幫我留住她的生命!”求助帖子,最終籌集到近20萬元善款,及時解決了孩子前期治療費用。
⑦加工不可中斷。
(2)遍歷計算過程
具體到畢業設計的管理來說,面對新工科的要求,需要將畢業設計的總體目標分解成一系列任務,通過完成一系列的任務去實現社會崗位需求畢業生的人文素養、科技知識、實踐技能、職業能力、倫理價值和行為規范的新工科目標。從選題到完成答辯的整個教學進程都應該在傳統學科專業建設的基礎上,重新審視培養方案、管理模式、教學平臺建設的合理性,并提出對指導教師能力素質的新要求。
工序Oij的容許延遲時間Aij只有在該工序兩個維度容許值Gij,Hij都計算出時才可得出,其中Gij,Hij分別代表取矩陣G,H中第i行j列的值。

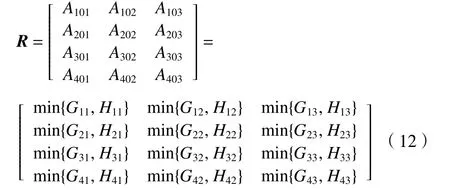
將式(9)和式(10)對應位置取最小值,得到新矩陣R。
月-2011年5月對本市3~6周歲幼兒3 346人屈光狀態進行調查,其中男童1 880人、女童1 466人,男女比例為1.28∶1;按年齡分成4組:3~歲組565人,4~歲組864人,5~歲組1 010人,6~7歲組907人。
① 輸入:t1,t2,t3,t4。
按照圖2的流程圖進行計算,輸入各工序交貨期t1、t2、t3和t4,作為輸入集合,遍歷計算R矩陣。矩陣中計算出的已知值作為第一層輸出值,將第一層輸出值添加入輸入集合,再次輸入矩陣得到第二層輸出值……將每層的輸入集合循環遍歷R矩陣各個元素,直至完全解出矩陣。
②第一次循環輸出:A103、A203、A303、A403、A402。
② 第二次循環輸出:A102、A202、A302、A401。
花垣—張家界斷裂。花垣—張家界斷裂帶自黔東松桃經重慶秀山入湘,過本區茶洞、花垣、保靖、永順、張家界向東延出區外入洞庭盆地。為礦區北部之邊界,主要由6條大致平行的NE向斷層組成,即F1、F1-1、F1-2、F1-3、F1-4、F1-5,其中F1為主斷層,具多期次活動特點,傾向305°~335°,傾角65°~75°,北西盤下降,垂直斷距500 m以上,水平斷距6.5 km。為長期活動的區域性大斷裂。自花垣—張家界一帶多個大型金屬礦床均分布其兩側,具區域性導礦特點。
③ 第三次循環輸出:A101、A201、A301。
④ 完全解出,輸出工序容許延時矩陣R。
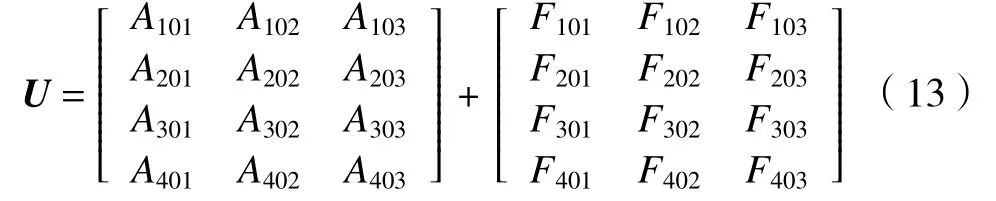
將各工序的原計劃完工時間加入矩陣R,得到重調度時刻點矩陣U。
3 重調度決策模型
重調度方式分為右移重調度(right shift rescheduling, RSR)、部分重調度(partial rescheduling, PR)和完全重調度(total rescheduling, TR)3種[15,16]。在重調度的3種方式中,右移重調度(RSR)對原調度方案的影響程度最小,部分重調(PR)度次之,完全重調度(TR)的影響程度最大。因此本文以逾期工件數最少、最大完工時間最小、對原調度方案影響程度最小為目標,找出使上述3個目標綜合最優的重調度方式。
重調度方式決策流程如圖3所示。
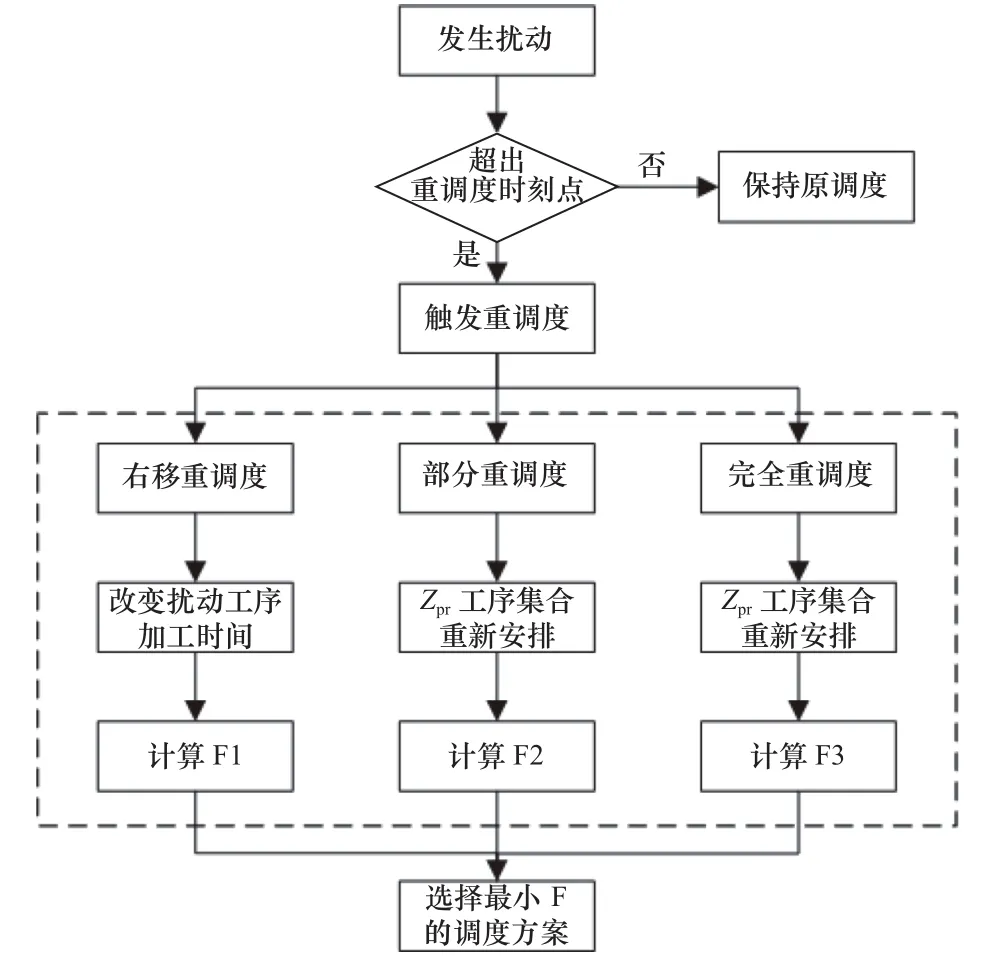
圖3 重調度方式決策流程
重調度方式決策模型如下。
(2)部分重調度
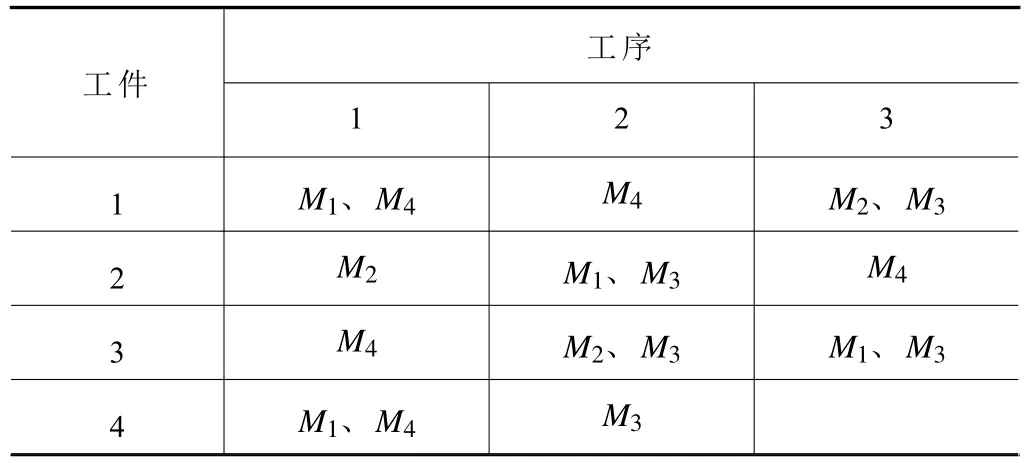
表3 工序可選機器表示例

表4 工序加工時間表示例
按照以上數學模型對調度方案進行計算,可以得出各個工序的開始時間、結束時間以及調度方案的適應度函數值,并根據適應度函數值對調度方案進行選優操作。
(1)右移重調度
右移重調度(RSR)是指只對工序進行推遲加工操作,而不改變各工序的加工順序與加工位置,在甘特圖中表現為工序向右移動。在本文中右移調度和右移重調度(RSR)雖然操作相同,但卻是兩種不同的調度方法。前者發生在重調度時刻點前,后者發生在重調度時刻點后。
假設擾動工序為工序Oij,發生擾動后,其實際加工時長為

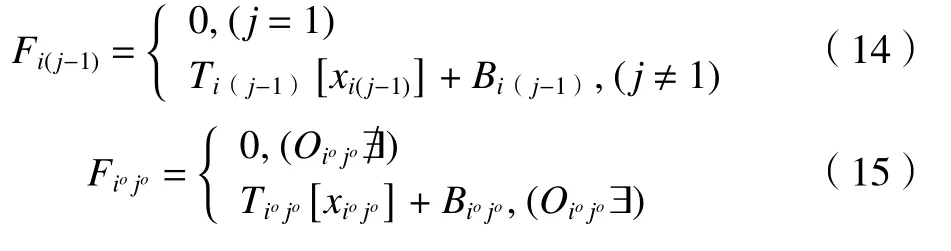
式(14)、(15)對Fi(j-1)、Fiojo進行了補充說明,當該維度的前一工序不存在時,值為0,其中Tij[xij]代表原調度方案中工序Oij的加工時長,Tij是工序Oij的加工時間集合,系數xij使工序加工時間表和工序可選機器表一一對應(如表3、表4所示),代表選擇機器集合中的第xij號機器進行加工。式(16)代表工序Oij的開始時間Bij,取工件維度前一工序結束時間Fi(j-1)與機器維度前一工序結束時間兩者的最大值;式(17)表示工序Oij的加工結束時間Fij;式(18)中的 δi代表當工件i的最后一道工序Oibi的結束時間大于交貨期時, δi=1,反之,δi=0;式(19)為適應度函數f,max{Fibi}代表最大完工時間,代表超出交貨期工件數,乘以一個極大數L,代表逾期工件數為第一決定因素,適應度函數值越小,代表方案越好。式(20)中 θ的取值為1、2、3分別代表右移重調度、部分重調度、完全重調度,s是一個極小的正數,其作用是在多種重調度方案的適應度函數值fθ相等時,選用對原調度方案影響程度最小的重調度方案,即選用Fθ最小的重調度方案。
部分重調度(PR),也叫受影響工序重調度[16],是指對受影響的工序進行重新安排,未受影響的工序仍保持原調度方案加工。由于工序間的影響關系是在工件和機器兩個維度上進行傳遞,故部分重調度的調度工序集合 Zpr可以用二叉樹的形式表示。
2.6 施工安全與企業法人的關系企業法人是第一責任者。在我們走向依法治理國家的形勢下,建筑安全也將走向依法治理的軌道,因此,企業法人對本企業的安全負有全盤責任。根據“誰主管誰負責”的安全管理原則,企業法人對員工的生命安全負全責,在經營決策上必須顧及安全,把安全擺到企業運作的非常重要的位置。
圖4中二叉樹頂端為發生擾動的工序,除頂端工序外的其他工序組成部分重調度工序集合 Zpr。在原調度方案的基礎上,對部分重調度工序集合Zpr進行重新安排, Zpr集合外的工序保持不變。利用遺傳算法將變異和交叉位置限定在 Zpr工序集合內,以適應度函數值為評價標準,進行多次迭代選優操作,最后得出部分重調度方案以及其適應度函數值f2。
圖4 受影響工序二叉樹
(3)完全重調度
②機器維度工序關聯矩陣H
完全重調度(TR)是對重調度觸發時還未加工的所有工序進行重新安排的一種調度方式。首先確定完全重調度的調度工序集合 Ztr。假設工序Oij發生擾動并觸發重調度,則完全重調度工序集合為以下兩個集合的并集:
Sink節點主要完成組網、接收路由節點和終端節點的數據信號,通過RS-232發送到上位機,同時接收上位機控制命令并下發;路由節點和終端節點功能類似,只是多了一個數據/命令轉發功能,采用定時器中斷模式,不工作時處于休眠狀態,減少能量消耗。協調器和終端節點工作流程如圖3和圖4所示。
②部分重調度工序集合 Zpr。與部分重調度操作相同,利用遺傳算法將變異和交叉位置限定在 Ztr工序集合內,得出完全重調度方案以及其適應度函數值f3。
3.多層次農業保險體系的不斷構建與完善。發展中國農業大災保險,不僅要在完全成本保險、收入保險的險種上進行突破,必然還要不斷構建一整套多層次的農業保險體系。該體系內既要包含補貼資金“一卡(折)通”等形式兌付、電商與政務平臺等信息進村入戶一站式市場化服務、農村大數據和高級人工智能分析等技術性成分,又需要在政策上傾斜、支持符合條件的涉農企業發行上市IPO、新三板掛牌和融資、并購重組等資本市場因素,農產品期貨期權市場建設、“保險+期貨”、“訂單農業+保險+期貨(權)”等農業風險保障形式上的擴大也不可或缺。這是中國農業大災保險發展路徑的第三步。
4 仿真分析
本文使用了Matlab軟件對重調度時刻點計算程序以及3種重調度方式程序進行編寫。機器數為10,工件數為6,工序數為6,種群數量200,循環迭代60代,變異率取0.6,交叉率取0.8。工序可選加工機器表以及工序加工時間表如表5、表6所示。
① 原調度方案中在重調度時刻點Uij還未開始加工的工序集合。
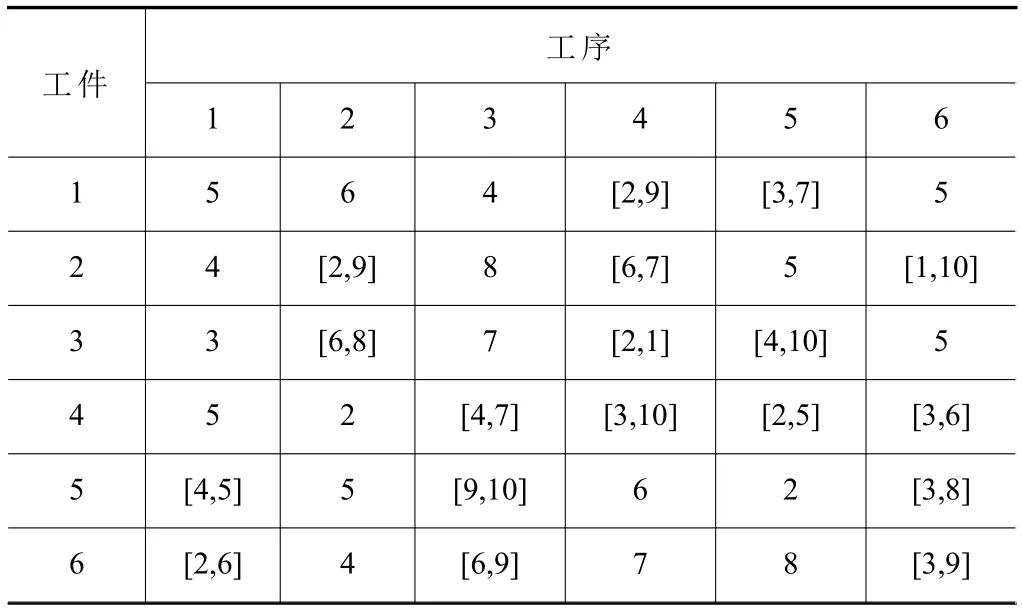
表5 工序可選加工機器表
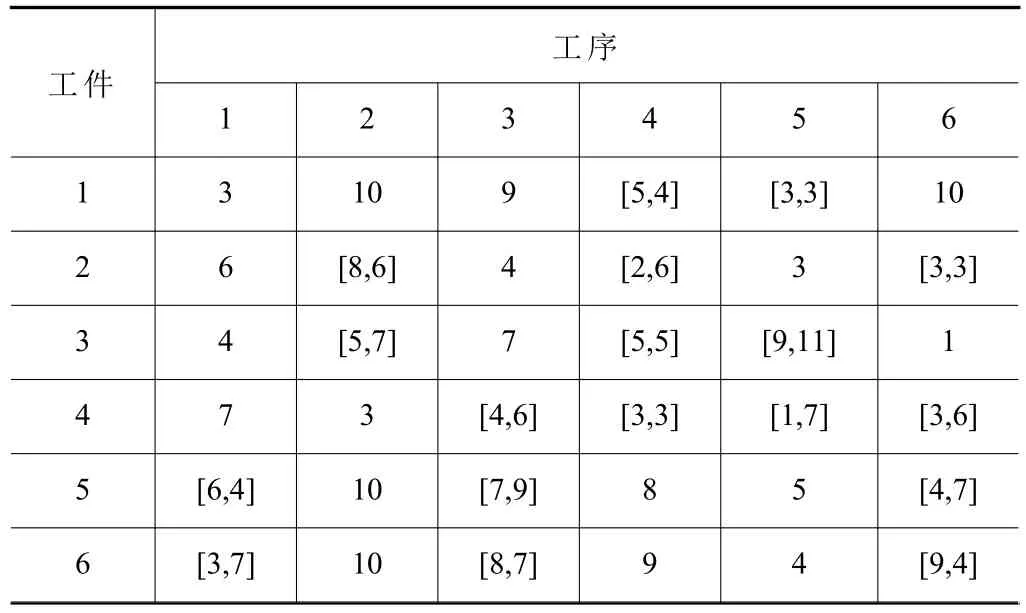
表6 工序加工時間表
根據表5、表6中的數據,利用遺傳算法,生成原調度方案如圖5所示。
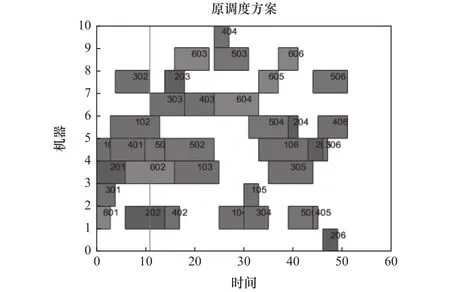
圖5 原調度方案
原調度方案的最大完工時間tmax為51。假設6個工件的交貨期都等于最大完工時間(t1=t2=t3=t4=t5=t6=51),根據重調度時刻點計算模型計算出該調度方案的重調度時刻表,如表7所示。
創新學習的研究目標是:培訓教師改變教學觀念,指導學生“樹立創新志向,開展創新性活動”;建立和完善創新學習理論體系;總結提煉創新學習教學思想,建構創新學習課堂教學模式,設計創新學習的教與學的策略;建構創新學習文化,主要采用文獻分析、調查分析、行動研究等研究方法,通過理論建構、狀態分析、策略建構及推廣應用等階段達成研究目標。
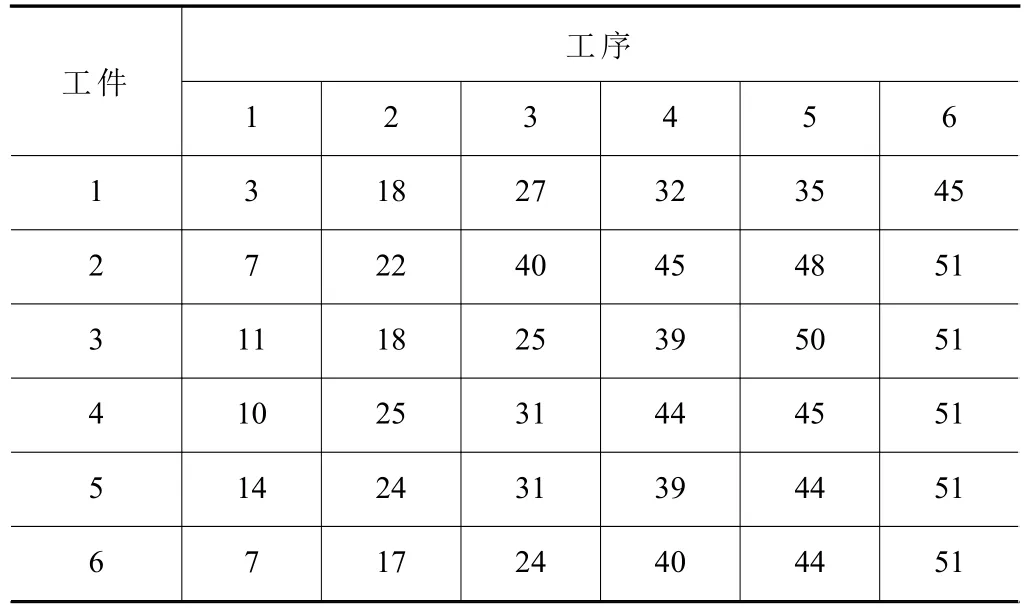
表7 重調度時刻表
假設發生擾動的工序為301工序,擾動時長為8.1,此時工序301結束時間由4延長至12.1。由重調度時刻表可知,工序301加工至時間為11時觸發重調度,3種重調度方案如圖6~8所示。

圖6 右移重調度方案
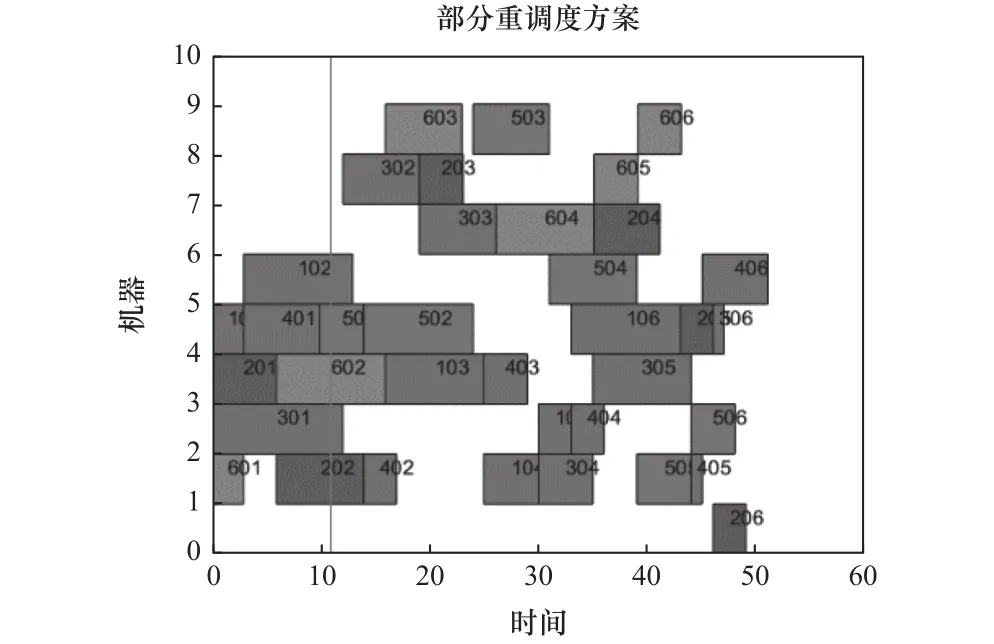
圖7 部分重調度方案
進行右移重調度的工序為105、106、203、204、205、206、302、303、304、305、306、403、404、405、406、505、506、604、605和606,共20道工序。
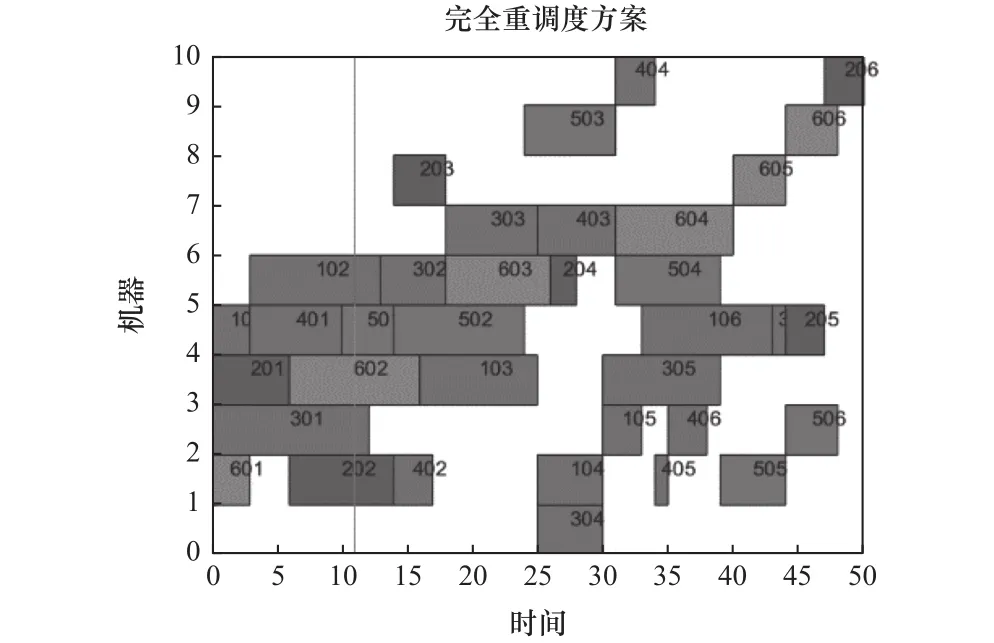
圖8 完全重調度方案
進行完全重調度的工序為103、104、105、106、203、204、205、206、302、303、304、305、306、402、403、404、405、406、502、503、504、505、506、603、604、605和606,共27道工序。
右移重調度的最大完工時間tmax1為52.1,逾期工件數為1;部分重調度的最大完工時間tmax2為51,逾期工件數為0;完全重調度的最大完工時間tmax3為50,逾期工件數為0。
由圖6可知,右移重調度方案的最大完工時間相較于原調度方案超出了1.1,恰好是擾動工序完工時間超出重調度時刻點的值。也就是說在擾動時刻點內的擾動,只需進行右移調整就不會出現逾期,間接證明了重調度時刻點的正確性。
對3種重調度方案進行決策:
F1=f1+l·1=52.1+L+l
F2=f2+l·2=51+2l
(一)設崗定職,自主管理。在踐行志愿活動時,應該努力把“管”的權利下放給學生。在工作分配當中,根據少先隊員不同的特點、個性、擅長領域進行合理分工,從而使隊員的個人能力得到最大程度地發揮,實現個人的成長,獲得新的體驗,成就展翅的雛鷹[1]。這樣在志愿活動中,每個隊員都有自己的服務崗位,人人有職,個個盡責,每個隊員都發揮特長,各顯其能,真正實現“自己的事情自己做,自己的活動自己搞”的少先隊行動名言,切實提升了其自主管理能力。
F3=f3+l·3=50+3l
顯然F3最小,故選用完全重調度方案。
5 結語
(1)針對柔性作業車間的隱性擾動,通過分析工序之間的動態關聯性建立數學模型,在工序和機器兩個維度上進行倒序遍歷計算,得到了準確的重調度時刻點。
2010—2011年四季總降雨90h,總降雨量27.7mm,雨量年最大值為2.0 mm。該區春季4月降水偏多(1.0 mm),3月降水最少為0;夏季8月降水偏多(5.7 mm),6月降水最少(2.9 m):秋季9月最 多(11.2 mm);11月最少為0;冬季則降水為0。 夏秋季降水次數略多,春季降水次數較少,冬季則無降雨出現,降雨強度均以小雨為主。
(2)基于遺傳算法對右移重調度、部分重調度、完全重調度3種重調度方案進行了設計,綜合考慮逾期工件數、最大完工時間、對原調度方案影響程度3個指標,構建了重調度方式決策模型,在重調度觸發時,可得到最合適的重調度方案。
(3)運用Matlab軟件進行仿真,驗證了柔性作業車間隱性擾動下重調度時刻點的準確性和重調度方式選擇的有效性。
