面向馬賽克戰的通感算融合網絡架構與模型設計*
2023-02-02 02:52:38張國華姜永廣鄧偉華
通信技術 2023年12期
張國華,文 軍,武 明,姜永廣,吳 賢,鄧偉華
(中國電子科技集團公司第三十研究所,四川 成都 610041)
0 引言
近年來,隨著全域作戰、多域作戰、馬賽克戰等作戰新概念逐步深入,“網絡中心、信息主導”思想已成為各新概念作戰理論真正實現的重要支撐。但是,由于長期受限于傳統人工智能算法的先進性和計算機算力,國內戰術通信系統的體系架構長期以感知、通信和存儲、計算相互獨立的設計為主。在新的作戰概念不斷發展的背景下,傳統的以平臺為中心的戰術通信系統體系架構設計方法的通、感、算相互分離的設計思路已經難以構建支撐作戰指揮的泛在通聯、超大容量、超高算力的通信網絡來實現新模式作戰,難以對作戰環境進行感知、對戰場數據進行認知,難以獲得搶占軍事競爭制高點的優勢,很難在對抗強敵作戰中快速克敵制勝。
隨著5G、物聯網、軟件無線電、云計算、邊緣計算、區塊鏈等技術在戰場網絡的應用,通信系統的載波頻率逐漸提高、帶寬逐漸增加、算力逐漸增強。趨于接近的通信和感知網絡的頻率、帶寬,網絡資源、計算資源分布式部署和服務化的應用,以及以深度學習、強化學習、分布式學習等為代表的人工智能技術的興起,在智能感知、通信優化、計算共享協同等應用領域產生了廣泛而深刻的影響,大大推動了具有高度分布特征的馬賽克戰的通信—感知—計算領域一體化融合設計的可能。同時,算力網絡、東數西算、數據中心等相關超大工程和人工智能、自動駕駛等相關超級應用不斷深入推進,我國已進入以云計算、大數據、人工智能技術為特征的后信息化時代,其中,作為人工智能核心要素的算力、算法和數據技術也實現了突破性進展。基于以上技術成果,將戰術通信系統體系架構重塑,以實現通信網絡的高智能化,來支撐強敵作戰條件下的作戰指揮信息系統建設,是打破與競爭對手之間非對稱作戰能力局面甚至實現趕超的重要環節,應該引起足夠重視并需盡快付諸研究實施。
面向超級強國競爭,了解對手、分析對手、模仿對手、超越對手是競爭研究的基本模式,能夠以更快的速度、更小的成本、更少的彎路快速集優實現能力提升。因此,面向強敵,針對作戰提出的新概念、新戰法、新模式,要盡量研究其內涵、特點、模型及開展的項目和技術突破情況,以期從中得到經驗和啟發,幫助實現我對等系統設計。近年來,國內學者針對美軍提出的馬賽克戰概念理論開展了大量的研究工作。郭行等人[1]研究了美軍馬賽克作戰的概念、效能、關鍵技術和對我軍的啟示;潘琦等人[2]研究了美軍馬賽克作戰的概念、OODA 環作戰結構、現狀問題、關鍵技術和相關研究課題;付翔等人[3]研究了馬賽克戰機理、特點和多域智能技術在馬賽克戰通信組網、信息共享、自適應規劃、動態管理、智能平臺的應用;馮杰鴻[4]研究了面向馬賽克戰的軍事體系智能化發展趨勢、規律和需要重點關注的核心技術。但上述相關研究主要側重于概念理論、探索性技術假設和效能預想評估的研究,系統性研究體系架構和模型設計的文獻較少。
本文提出了馬賽克戰的交戰模型,研究了基于感知、通信、存儲、計算一體化融合的網絡體系架構和設計模型,展示了環境感知、通信互聯和高效計算為一體的戰術領域通信網絡架構和物化模型。
1 馬賽克戰綜述
1.1 馬賽克戰的概念
2017 年,美國國防預先研究計劃局(Defense Advanced Research Projects Agency,DARPA)下屬戰略技術辦公室(Strategic Technology Office,STO)首次提出馬賽克戰概念,初步構想將傳感、網絡、指控、武器/平臺等要素碎片化形成“馬賽克塊”并通過“馬賽克拼圖”方式進行快速能力拼裝,形成作戰體系殺傷鏈,實現彈性、重組和自適應的強大作戰能力[5-6],并初步定義了馬賽克戰的作戰力量組合方式機理。2019 年3 月、9 月,DARPA 通過公告和研究報告進一步明晰馬賽克戰的高動態性、高自主性、高協同性,以適應動態復雜的作戰環境,同時,通過自身分解和柔性重組,加重敵方認知負擔,從而提升不對稱作戰優勢。其目標是通過將殺傷鏈的發現、確認、跟蹤、瞄準、交戰、評估(F2T2EA)功能分布在作戰區域所有有人和無人平臺上,并通過效果網將這些能力單元快速重組和連接,形成快速靈活重組、可擴展、自適應的聯合多域殺傷能力。
1.2 馬賽克戰的特點
1.2.1 面向實戰,彈性抗毀
馬賽克戰強調適應實戰中“反介入/區域拒止”條件作戰環境的能力。“反介入/區域拒止”條件下,地方干擾作戰體系的通信鏈路,造成通信連通和信息交互受阻,無法形成各資源共享交互。在馬賽克作戰模式中,從作戰體系結構出發,將感知、計算和通信進行互惠增強,形成區域認知能力,并通過人工智能技術輔助判斷、決策和調整,形成具有通信泛在自適應互聯、作戰要素自適應動態重組、信息去中心化分布式按需協同共享的彈性、韌性抗毀作戰體系。
1.2.2 高度分散,跨域協同
馬賽克作戰是全域作戰、多域作戰、聯合作戰等作戰概念的進一步升級,主要是基于多樣化作戰任務,在廣闊戰場環境下各部(分)隊在高度分散的作戰地域實施的作戰。分布式和跨域協同是馬賽克作戰的最主要特征。協同包括3 部分的內容:一是大區域高度分散的部(分)隊之間信息共享、時空統一;二是小區域內系統各平臺之間信息暢聯、行動協調;三是單平臺上的多個功能單元之間有機組合、動態裝配、智能通聯。通過各域的協同一致,提升馬賽克戰協同探測、協同決策、協同指揮、協同攻擊、協同防御等作戰環路閉環和體系作戰能力,從而取得戰爭博弈優勢。
1.2.3 模塊組合,動態靈活
傳統的作戰系統與平臺注重本身的多能性,但不注重靈活性,一般通過功能疊加集成為復雜的綜合系統,導致使用、維修、維護和升級均要付出較大的成本代價。馬賽克戰概念的拼圖式功能組合思路弱化了系統和平臺基本功能單元的耦合度,將復雜作戰平臺功能以馬賽克塊進行功能解耦。通過功能單元解耦和模塊化組合設計,降低了裝備全生命周期內的研制、生產、使用、維修、升級等經濟和時間成本,并通過按需動態的拼圖式功能快速組合,提升系統和平臺的按需資源調度能力,提高戰時作戰效率和效能。
1.2.4 體系賦能,多鏈殺傷
聯合多域殺傷力是DARPA 對馬賽克戰的目標之一。將殺傷鏈的發現、確認、跟蹤、瞄準、交戰、評估(F2T2EA)功能要素分別部署在作戰域各有人/無人平臺,并通過信息系統網絡將這些功能進行快速重組與連接,提供快速、可擴展、自適應重組能力的殺傷力[7]。馬賽克戰將作戰體系中的傳感器、傳輸網絡、指揮決策、行動控制、交戰武器及有人/無人平臺以單元模塊實體方式集成,形成分布協同、動態組合、彈性抗毀的作戰效果網。較傳統的“單一殺傷鏈”和演進發展的“系統之系統”“殺傷網”,馬賽克戰形成的是“自適應殺傷網”,具有更強的作戰殺傷魯棒性。
1.3 馬賽克戰技術項目與發展方向
從馬賽克戰概念被提出開始,DARPA 就圍繞馬賽克戰達成的作戰能力目標,在體系架構、指揮控制、通信組網、武器/平臺及基礎技術方面開展了相關項目布局與研究,旨在提升體系柔性重組能力和各種作戰資源的共享能力,并增強互聯、互通、互操作性。其中,在體系架構相關技術領域布局并相繼開展了“系統之系統集成技術與試驗(SoSITE)”(2014 年4 月)、“自適應跨域殺傷網(ACK)”(2018 年7 月)、“任務集成網絡控制(MINC)”(2021 年4 月),旨在解決如何快速集成異構系統,打破傳統局域、靜態、剛性的封閉架構,構建全域、彈性、網狀的開放架構;在指揮控制方面布局并相繼開展了“空戰演進(ACE)”(2019 年6 月)、“支持快速戰術執行的空域全面感知(ASTARTE)”(2020年4 月)、“用于彈性計劃、戰術與試驗的戰略混沌引擎(SCEPTER)”(2022 年1 月),旨在運用人工智能技術突破人機系統難題,實現人的指揮與機器相輔助,提升作戰管理效率;通信組網相關技術領域布局并相繼開展了“九頭蛇(Hydra)”(2014年)、“對抗環境下的通信(C2E)”(2014 年)、“任務優化動態網絡自適應(DyNAMO)”(2015年10月)、“保護前線通信(PFC)”(2017 年11 月)、“海洋交戰即時信息(TIMEly)”(2019 年6 月)、“基于信息的多元馬賽克(IBM2)”(2019 年6 月)、“彈性組網分布式馬賽克通信(RN-DMC)”(2020年6 月)、“天基自適應通信節點(Space-BACN)”(2021 年9 月)等項目,旨在建立跨域、實時通信網絡,提供即時、高效信息保障;在武器/平臺相關領域布局并相繼開展了“小精靈(Gremlins)”(2015 年9 月)、“黑杰克(Blackjack)”(2018 年4 月)、“魔鬼魚(Manta-Ray)”(2019 年6 月)、“垂釣者(Angler)”(2019 年11 月)、“遠射(LongShot)”(2021 年2 月)項目,旨在將武器/平臺功能分解、要素最小化,并開發無人自主、功能解耦裝備單元,實現系統功能的“化整為零”;在基礎技術相關技術領域布局并相繼開展了“競爭環境目標識別與適應(TRACE)”(2014年12月)、“靈活編隊(A-team)”(2016 年12 月)、“遠征城市場景彈性作戰試驗臺(PROTEUS)”(2017年6月)、“地理空間云分析(GCA)”(2017 年10 月)、“系統之系統增強小型作戰單元(SESU)”(2019 年3月)項目,旨在解決戰場智能、快速信息處理、多模式態勢感知、高效建模仿真、超敏目標時敏等基礎性問題[8-9]。馬賽克戰技術項目的布局如圖1 所示。

圖1 DARPA 馬賽克戰技術項目布局
從DARPA 布局發展的馬賽克戰項目來看,相關技術的發展方向主要體現在以下幾個方面:
(1)作戰資源與作戰任務動態適配。通過快速拼接構建復雜殺傷網作戰體系是馬賽克戰的核心內涵。將戰場的各種傳感器、通信網、指控系統、武器平臺等碎片化作戰資源按照馬賽克拼圖快速拼裝,形成高度彈性和韌性的自適應殺傷網。ACK、DyNAMO 等技術項目主要實現資源與任務動態自適應的研究課題。
(2)戰場環境認知化和網絡動態化。戰場環境認知和網絡動態自適應調整是認知對手、限制對手、打贏戰爭的根本保證。DARPA 開展ASTARTE、C2E 等技術項目研究,旨在破解戰場認知環境下的彈性自適應網絡。
(3)信息交互和行動控制的跨域協同與自主。DARPA 通過開展RN-DMC、Space-BACN、MINC等技術項目,研究高度分布的馬賽克戰如何實現跨域通信覆蓋和信息交互,并實現分布在不同作戰地域作戰力量之間的高效協同和行動一致。
(4)平臺向無人化自主協同方向發展。無人化和智能化是現代戰爭減少戰斗減員的重要途徑。DARPA 開展的Gremlins、Blackjack、Manta-Ray、Angler、LongShot 等項目主要面向有無人作戰協同,旨在將無人化武器/平臺進行功能解耦和智能化開發,實現無人平臺之間的自主協同,形成偵察、判斷和打擊能力。
(5)任務判斷與決策智能化。判斷與決策是實現OODA 戰斗過程閉環的關鍵環節。SCEPTER等項目主要通過人工智能輔助,實現有人無人協同作戰過程的目標解算判斷和指揮決策控制,提升作戰殺傷網效率。
1.4 馬賽克戰交戰模型
馬賽克戰推動了傳統作戰平臺節點的變革,傳統的作戰平臺要么是功能龐大復雜的復合節點,要么是功能單一的專業節點,而馬賽克戰的平臺節點功能可以按需重組為一個體量適中的功能節點。一種基于作戰平臺節點和信息關系構建的馬賽克作戰概念結構與交互模型如圖2 所示。

圖2 馬賽克戰概念體系結構模型
圖中的結構模型是用節點和連線組成的系統,可以看作是由點集Ver和邊集Edg組成的二元組Group=(Ver,Edg)。其中,節點Ver可以是作戰區域內的偵察、指揮、信息、情報、通信和武器平臺節點,邊集Edg可以是與作戰指揮相關的情報、指揮、控制等關系,但不僅是指信息關系。比如,一個情報關系的Edg可以是獲取方也可以是接收方,表示了Edg是否有向;也可以用來表示信息的重要和緩急程度,表示了Edg所處權重。馬賽克戰結構模型是所有點集Ver={ver1,ver2,…,vern}和所有邊集Edg={edg1,edg2,…,edgm}的二元組集合,n表示系統偵察、指揮、通信、火力等實體節點的總數,m表示實體節點之間情報、指揮、控制等關系的總數。
對于馬賽克戰而言,參戰兵種多、兵力分散、協同交互程度高、作戰多能靈活、作戰節奏快,需要構建更為精干靈活的網絡體系結構來實現作戰體系的快速靈活重組,以適應復雜作戰場景。在信息域范疇,一個典型的馬賽克戰模型是以平臺P 為搭載平臺,集成信息獲取實體(O)、信息傳輸實體(C)、指揮控制實體(D)、交戰火力實體(F)等實體,承載情報(in)、指揮(ca)、控制(co)、狀態(st)等信息的實體模型。在任務域范疇,一個典型的馬賽克作戰任務鏈模型是信息獲取實體(O)收集戰場環境情報信息(in),通過信息傳輸實體(C)通告指揮控制實體(D)進行數據融合、分析、處理,并籌劃和制定決策,將進行行動的指揮信息(ca)傳遞給交戰火力實體(F),從而完成對敵目標的行動,并在行動過程中根據需要將狀態信息(st)在各實體進行傳遞交互,而控制信息(co)主要用于任務系統與搭載平臺的信息交互。
一個包含Pi,Pj,Pp,Pq節點的馬賽克戰交互模型中,所有節點均集成有O、D、F、C 實體,所有O、D、F 實體之間均能通過C 實現in、ca、co、st 信息的傳輸與共享,并形成Oi→Di→Fi的同P任務鏈或Oj→Di→Fp的異P任務鏈。按照網絡規模,任務鏈路的條數為(n為系統節點數),與傳統概念的n條任務鏈相比,該交互模型大大提高了任務鏈的敏捷性和適應性。包含Pi,Pj,Pp,Pq的4 節點馬賽克戰交互模型如圖3所示。
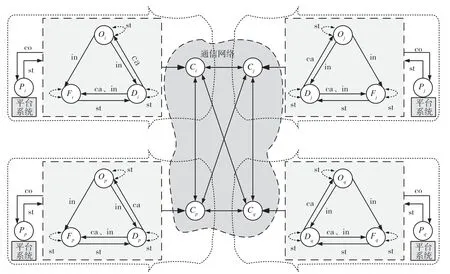
圖3 4 節點馬賽克戰交互模型
1.5 馬賽克戰效果網能力需求
馬賽克戰是一種體系智能化、自主化、高效率作戰概念形式,對效果網低時延、高可靠、大帶寬通信效能的要求越來越高,對抗毀、抗干擾、隨遇接入的不間斷通信需求也越發嚴苛,因此需要以深度學習、人工智能作為技術實現的重要支撐。
從圖2 的馬賽克戰體系結構與交互模型來看,需要通過通信系統將作戰區域各實體實現信息鉸鏈,其邊Edg主要是通聯性、業務承載、帶寬、時延,以及自組織、自適應的有向關系度量。馬賽克戰效果網要實現相關度量和自適應調整,主要通過以系統算力為基礎的資源池、以行動為框架的模型庫、以數據統一為核心的算法集3 個方面實現網絡的最優化動態自適應,需要智能調度傳輸、組網、控制、計算相關的各種資源,并在內部構建暢通聯系和協調調度通路。馬賽克戰效果網能力需求主要包括架構柔性重組能力、環境認知能力、網絡和計算資源智能協同調度能力、專家經驗輔助動態管控能力。架構柔性重組能力需求方面,需要通過開放式架構的柔性設計和重組基因植入,將戰場區域內的分散單元動態協同組合,實現效果網的動態靈活性、環境適應性和彈性、韌性,支撐作戰OODA環[10]。環境認知能力需求方面,需要通過電磁環境主動感知和被動探測明確可用頻譜資源,并采用動態頻譜接入技術,實現有效躲避戰時環境干擾,提高可靠通信和頻譜利用效率。網絡、計算資源聚合和智能協同調度能力需求方面,需要通過網絡和計算資源的聯網上云,將分散在戰場區域的網絡和計算資源統一虛擬化和數字化,形成緊密系統的可統一調度資源池,基于資源高效獲取、互聯共享和按需調度,實現資源協同調度的最優解。專家經驗輔助和動態管控能力方面,主要通過數據挖掘、專家知識庫構建,以及規范化、標準化、服務化表征和封裝統一數字化處理和協議格式,構建準實時的戰場關聯數據交互和調度資源池,實現有限資源的優化分配、高效調度、按需調控和高效利用,支撐對網絡和計算資源的高效調度和智能控制。
2 通感算融合網絡體系架構設計
在戰場通信環境領域,感知是實現戰場網絡暢聯和信息融合處理的必要前提,通常是通過感知、探測戰場電磁波和頻譜信號獲得對環境信息屬性和狀態的無線信號感知探索和頻率有效利用,完成檢測、識別和通信傳輸參數重配置;通信是戰場環境端到端信息傳輸的基本功能,通常通過戰場信息系統部署的有線無線結合、遠距近距結合、寬帶窄帶結合、空天陸海結合等傳輸媒介和特性傳輸實現戰場通聯手段及組網與控制相結合的通信網絡;計算是實現戰場環境端到端信息處理的關鍵環節,通常是指基于戰場分布式通用軟硬件平臺、數據庫和數據結構實現特定任務和特定行為的計算行為。基于效果網能力需求,設計通感算一體融合的戰場戰術網絡體系架構可以實現感知能力、通信能力、計算能力的內生融合和互惠互增,既可以解決戰場環境中大數量通信和感知單元日益增長的業務和傳輸需求與算力資源有限之間的矛盾問題,又可以將環境感知、信息傳輸、信息共享、數據處理、指令控制形成信息流環路在統一平臺形成閉環。
2.1 通感算一體化網絡架構
戰術通信系統通感算一體化的核心設計理念是在戰術環境中構建泛在覆蓋的通信能力、多維融合的感知能力和分布式協同的智能計算的網絡,實現3 個獨立的能力在同一系統融合設計,且互惠互利。戰術通信網絡內的各網元功能單元采用通信、感知、計算軟硬件資源的共享與協同,實現環境頻譜數據多方位感知、戰場通信節點之間的多節點協作通信和分布式算力基礎設施之間的智能系統計算,達成通感算功能的深度融合和互惠增強,從而使戰術通信網絡具備將環境、通信、信息、存儲、計算等資源分布智能協作和信息流閉環協調智能交互的能力,有效支撐戰場環境下頻譜環境迅速感知與重構、智能輔助通信調度、算力資源共享與智能調配,極大提升戰場環境用戶的網絡服務質量和用戶體驗質量。
一種以“網—云、邊、端”為整體架構的新型通感算一體網絡架構如圖4 所示。該網絡架構在戰場要素布局高度分布式情境下,基于泛在互聯的衛星、散射、微波、電臺等手段構建空天地一體網絡深度融合組網,將戰場環境下的機動云、邊緣計算服務器、通感算一體化終端及固定環境下的區域服務云等戰場感知、計算資源和固定增強計算資源高效互聯,有效實現戰場多維感知器的協同融合和廣泛分布算力資源的云邊共享、邊端協同、聚合服務、智能調度與分配,將感知、通信、計算深度交叉融合并互惠增強,高效支撐戰場信息和數據智能系統融合連接,滿足高度分散馬賽克戰模式下的通感算一體的感知、通信、算力等多維資源系統一體應用和用戶體驗需求。

圖4 通感算一體化網絡體系架構
2.2 通感算一體化網絡技術體系
感知、通信、計算、存儲在通感算一體化網絡架構設計實現,需基于傳感器、收發信機、雷達、通信控制、計算服務等物理層單元實體,將感知、通信、計算域的資源和服務深度融合,形成互惠增強網絡整體,支撐態勢感知、指揮決策、行動控制、綜合保障等作戰應用。其中,感知獲取豐富環境數據、業務流量特征和網絡可用資源,可以為通信頻譜接入和資源調度提供信息支撐,并通過融合共享的分布式算力和數據融合處理為通信算法提供全局策略和就近計算、高效調控;通信可有效傳遞和匯聚環境感知信息,擴展感知域認知深度,通過共享的融合算力支撐分布式感知數據特征描述、語義一致轉換,并通過行動模型和算法庫將感知后行為預置,提供輔助決策;感知和通信能夠將戰場分布式算力信息在計算網絡中快速傳遞和同步,增強算力網絡整體調度和實時分配能力。通信、感知、計算各域之間互惠增強設計實現,需要相關的技術群進行支撐,感算增強通信的技術群主要包括感知支撐通信獲取戰場環境數據先驗數據、分布式邊緣計算支撐通信信道探測預估和通信通知、云端架構支撐多維數據融合處理和大數據分析通信優選等技術群;通算增強感知的技術群主要包括分布式計算支撐感知數據融合處理與語義轉換、通信支撐多節點感知和信息傳遞匯聚等技術群;通感增強計算的技術群主要包括感知數據獲取支撐分布式算力調度、通信能力支撐分布式計算算力協同交互等技術群。通感算一體技術體系如圖5 所示。
3 通感算融合模型設計
3.1 通感算融合一體化模型
通信系統與感知系統之間存在兩個方面的特別相似性和關聯性,催生兩個系統的一體化設計。一是在物理功能單元和信號流程方面,通信系統與感知系統在射頻收發信機、基帶信號處理等存在相近或相似的特性;二是在電磁頻譜利用和通信傳輸控制等方面,通信系統與感知系統在頻率探測、頻率監視、信號模糊處理、電子功率壓制等存在關聯性。通信系統與計算系統之間,在“一切皆資源”的理念推動下,將通信系統、計算系統的網絡資源、算力資源進行耦合調劑、整體分配,已經成為軍事應用方面的成熟課題,也決定了兩者的強耦合關聯關系。感知與計算之間需要戰場分布的算力資源構建環境認知引擎,對頻譜感知、同類設備發現感知、干擾檢測感知進行融合和計算、處理,輔助實現多維感知、網絡發現、信道協作探測、快速頻譜接入功能。
通感算融合一體化設計策略是通過共享硬件、頻譜、算力,構建優化、協調、共享的一體化互惠互助整體。通感算融合一體化設計模型如圖6 所示。基于同一軟件、硬件平臺,在感知域,通過物理層頻譜感知、干擾檢測、節點發現和目標識別實現環境信息的探測和發現,將鏈路層信息數據傳輸到算力域模型庫和算法集進行感知數據計算和決策,并在鏈路層與通信域實現信息傳遞和策略交互,通過協同探測與感知控制、頻譜接入、頻譜推理、頻譜分配、頻率維護實現感知環境和通信環境的協調一致;在通信域,基于感知域環境信息快速調整波形和鏈路層組網控制策略,并基于算力網絡實現組網路由、拓撲管理、服務質量(Quality of Service,Qos)等通信組網和服務計算,提供戰場環境下的優化通信傳輸;在計算域,基于分布式共享存儲和計算平臺,在算力網絡層實現算力網絡的路由尋址、狀態監控、調度控制等算力資源共享功能,并在算力服務層提供算力資源統一編排、調度和算法實現,為通信域和感知域提供統一協同共享的高可靠性、短響應時間的算力服務支撐。
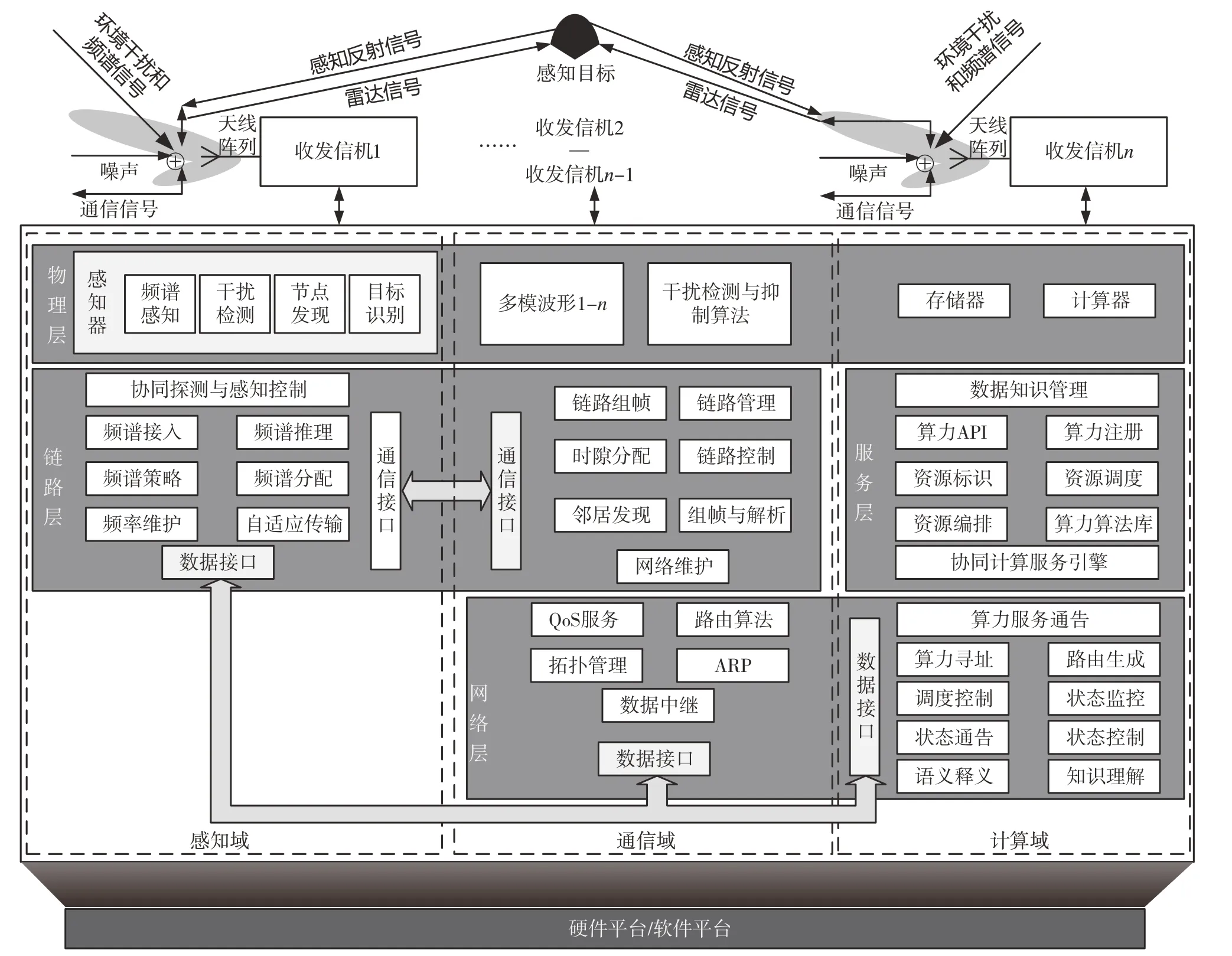
圖6 通感算融合一體化設計模型
3.1.1 通感一體收發信機模型
通感算融合模型的收發信機模型是通過感知外接環境并自適應調整波形通信的模型,基于頻譜感知器的感知信息、鏈路質量、通信距離等通信參數信息輸入,通過策略推理形成最佳用頻等選擇控制方案,并與用頻政策約束共同驅動,確定通信傳輸波形的決策方案,在波形資源庫中選擇合適的傳輸波形進行傳輸。通感一體收發信機模型如圖7 所示。
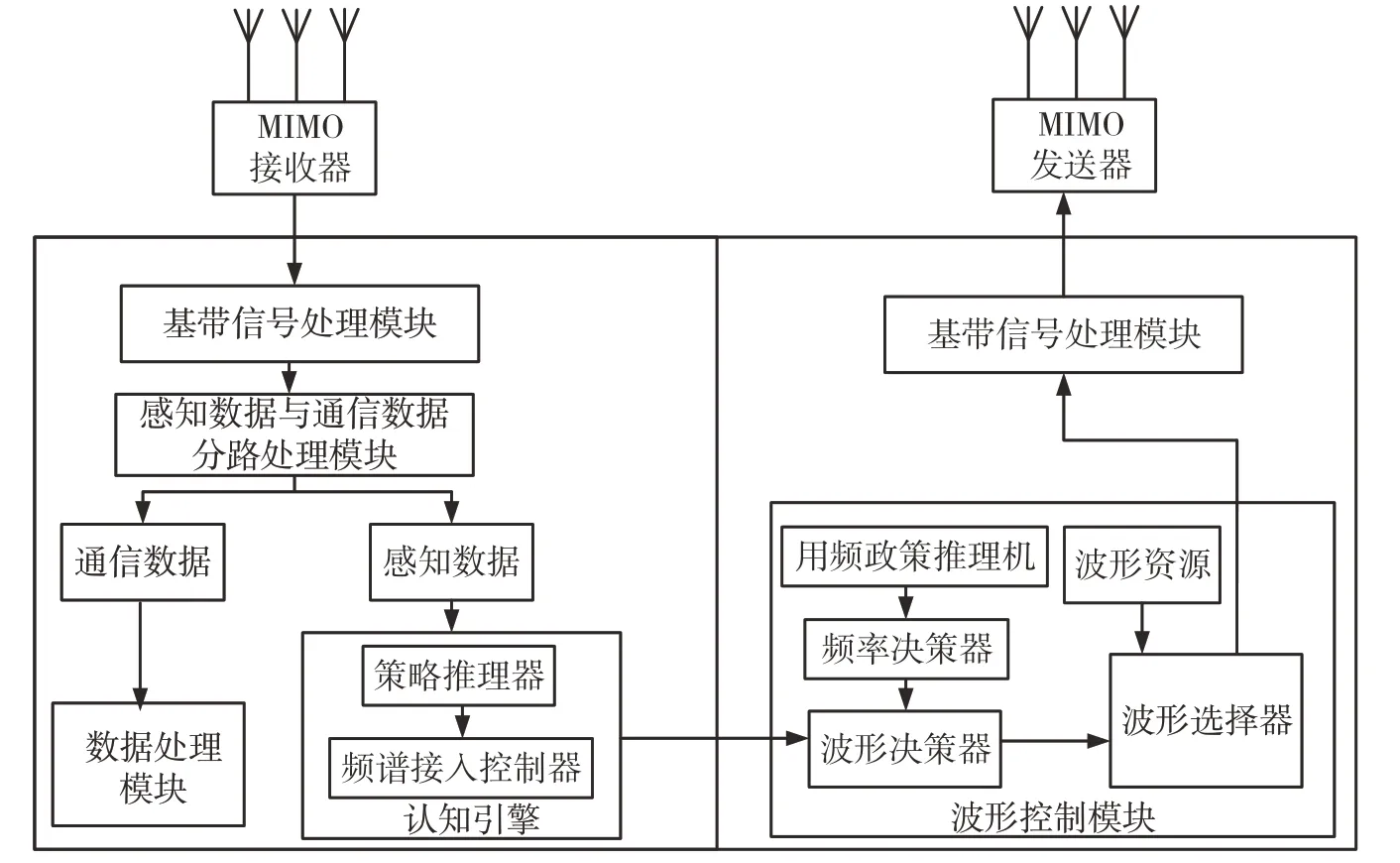
圖7 通感一體收發信機模型
3.1.2 通感一體幀結構模型
無線通信系統的空口幀結構主要是指波形,當前通信系統中連續波體制波形占據主導地位,以正交頻分復用波形(Orthogonal Frequency Division Multiplexing,OFDM)為典型代表,主要包括信道帶寬、子載波數、子載波間隔、調制方式、編碼方式、同步序列碼、擴頻碼等主要參數。而通感一體幀結構設計是通感算一體化信息處理技術實現的關鍵內容之一,需要綜合考慮頻段帶寬、通信能力和感知需求等要素進行幀結構設計,有利于實現大帶寬、低時延傳輸和時敏捷變頻率分配等通信內生感知能力。以戰術電臺5 MHz 帶寬、1 ms 偽幀基本單元為例,通感一體偽幀結構模型如圖8 所示。
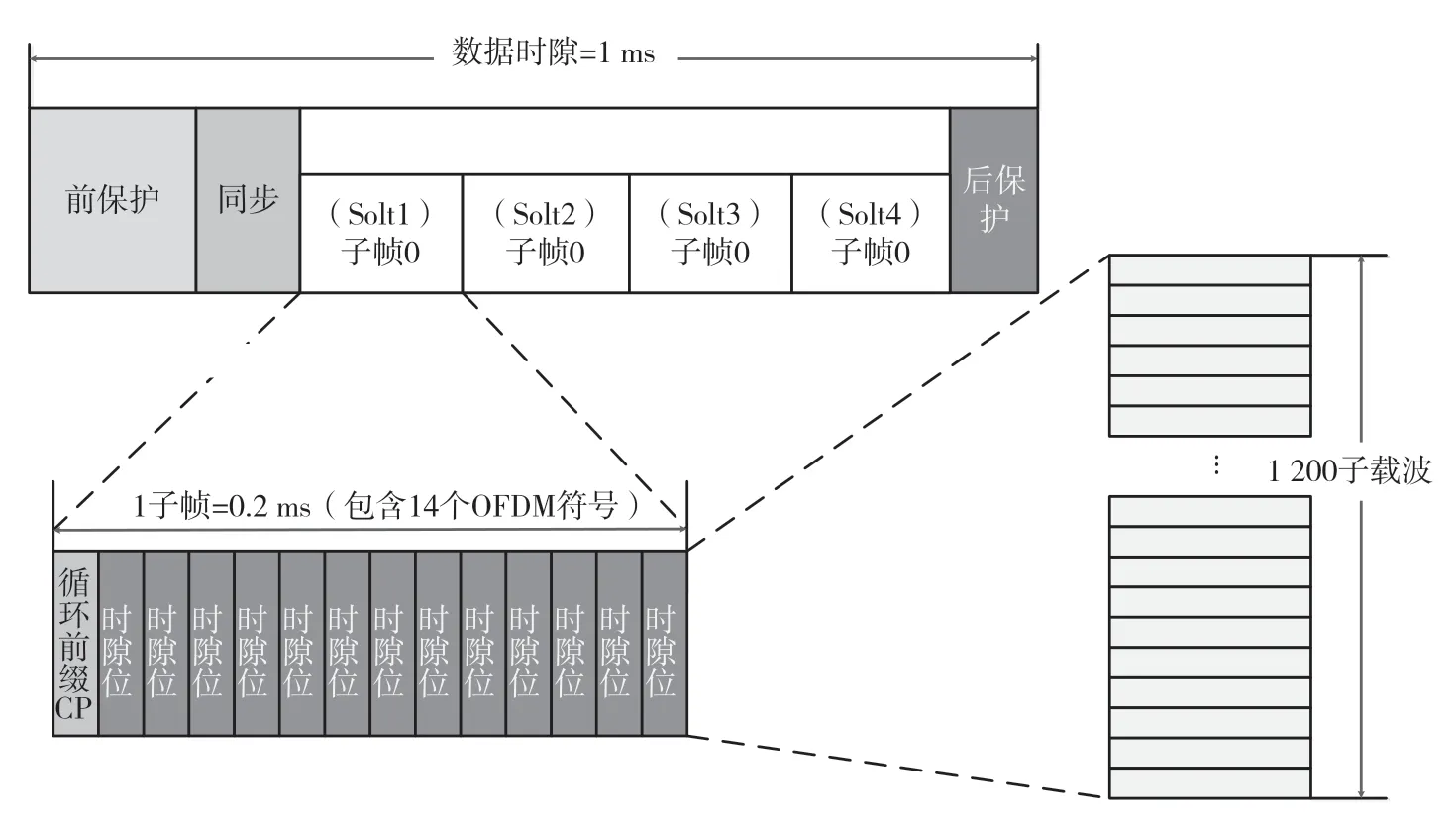
圖8 通感一體化偽幀結構模型
1 ms 幀結構包含前后保護、同步頭和4 個子幀,每個子幀幀長0.2 ms,包含了由1 個循環前綴CP 和13 個時隙位的OFDM 符號,每個時隙位在頻率域上承載1 200 路子載波。該幀結構可以根據通信和感知的需求將時隙位自定義為通信信息和感知信息承載,實現對通信與感知所需的時頻資源高效利用。
3.1.3 算力一體模型
隨著馬賽克戰多方協同業務需求的增長,計算能力從少數數據中心向網絡邊緣和終端設備擴散。算力一體化模型包括體系算力的一體化和通感算設備本身的一體化,通感算設備本身的一體化主要是基于一體化物理硬件實現通感算業務的一體化算力融合。本文主要描述體系算力的一體化。體系算力具有典型的處理分布、數據分布、功能分布的分布式特征,并需通過算力應用的融合實現戰場網絡的算力共享,其整合多方算力資源,以全網算力資源池的形態為更趨多樣化的應用提供更加靈活優質的算力服務[11]。基于“網—云、邊、端”體系架構的算力一體化模型如圖9 所示。
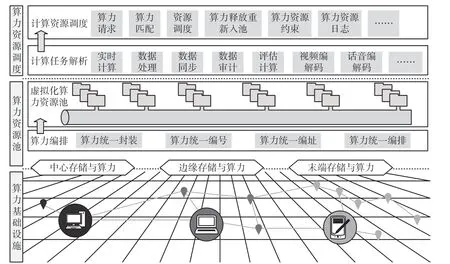
圖9 算力一體化模型
3.2 設備集成模型
馬賽克戰強調功能分布與靈活重組。采用“小單元、快集成”模塊設計,是實現功能單元緊湊集成和快速靈活重組、重構的關鍵技術途徑。本文采用當前應用于航電系統的先進現場可更換模塊(Linear Replaceable Module,LRM)架構模型設計馬賽克戰功能模塊,具有模塊化、快拆裝、結構強、自識別功能模塊、自適應健康管理等特性。設備集成模型如圖10 所示。
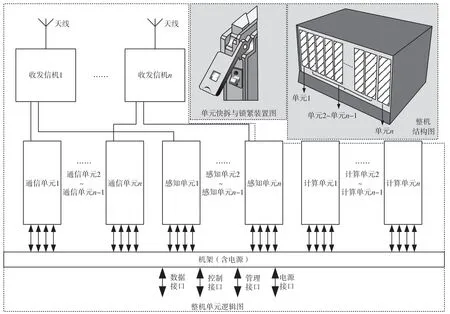
圖10 設備集成模型
LRM 架構可將感知單元、通信單元、計算單元和存儲單元在一致性模塊中設計實現,這種集約化、緊湊型設計模型在物化實現時要重點考慮機箱強度設計、槽位互換性設計、電磁兼容設計、熱設計、輔助插拔與鎖緊結構設計等,可以提升整機設備維修性(將基層級、中繼級、基地級3 級維修改進為基層級、基地級2 級維修)、可靠性(雙外殼結構)、測試性(統一BIT 測試點)、保障性(統一接口、接插件、接口等),同時還可以提升系統通用化、標準化、組合化水平,并實現增強擴展、升級能力。
3.3 平臺集成模型
馬賽克戰強調系統按需靈活重組。基于以上思想,戰術通信系統平臺的集成設計采用“平臺與載荷解耦、模塊化開放架構、總線化柔性互聯”的設計思路,遵循特定標準,將各個基本模塊都經過獨特模塊化和統一組合化集成設計,使作戰單元探測、通信、判斷、計算、決策、指揮、控制等基本功能模塊組件能夠在全生命周期內柔性按需修改、添加、刪除和更換,各基本功能模塊之間按需組合、協同自主形成整體功能可任意定制、任意組合的能力整體,且不依賴于不同承載平臺的差異化,增加敵方對我方作戰單元認知難度,提升系統靈活重組和重構能力和作戰效能,滿足開放性、可擴展、可升級、可進化的未來適應性需求。平臺集成模型如圖11所示。

圖11 平臺集成模型
采用該開放式架構集成模型,能夠快速將作戰能力集成在不同作戰平臺系統,可提升平臺系統柔性拓展,并支持平臺作戰能力以小功能模塊方式按需升級,有效推動作戰效能發揮。
4 結語
本文首先對馬賽克戰進行了綜述,包括其概念和特點、相關技術項目和發展方向,同步分析了其作戰體系結構與交互模型、實施作戰的效果網能力需求;其次依據馬賽克戰特點和交互模型、效果網能力需求完成了滿足馬賽克戰特點和需求的通感算一體化網絡架構和技術體系設計。在此基礎上,進行了通感算融合一體化模型的空口收發信機、波形幀結構、算力一體化模型和設備、平臺的集成模型設計。本文設計的架構體系和模型,與馬賽克戰強分布、高協同、靈活性、易重組需求進行了精確匹配,可以適應馬賽克戰對環境感知和通信自適應,并借助高度協同的算力網絡資源自適應調度與匹配的作戰需求,對助力打贏現代信息化戰爭,開展精干高效戰術網絡設計,提供了基礎理論和設計思路支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
中外會展(2014年4期)2014-11-27 07:46:46
