基于粒子濾波的室內巡邏機器人SLAM技術研究*
2023-01-31 11:28:10梁明亮張凱王云飛
科學與信息化
2023年2期
關鍵詞:利用
梁明亮 張凱 王云飛
鄭州鐵路職業技術學院 河南 鄭州 451460
引言
本論文對巡邏機器人的全向運動底盤進行設計,有效解決在現場測試中容易遇到的轉向困難、碰撞等問題。算法上,克服傳統RBPF-SLAM算法中存在的粒子退化現象,采用馬爾可夫鏈-(MCMC)運動步進,提高粒子的多樣性。建議分布的計算中,增加激光雷達的觀測模式,以改善地圖構建的準確性[1]。
1 全向巡邏機器人系統設計
1.1 全向巡邏機器人平臺
本文巡邏機器人的全向移動底盤數學模型如圖1所示。
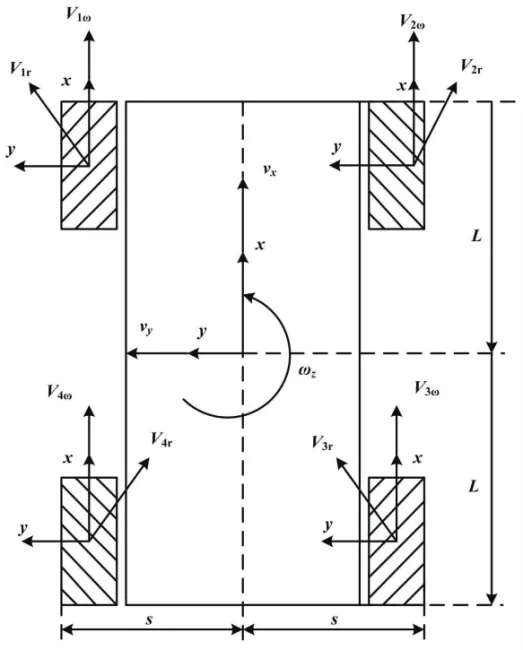
圖1 全向底盤數學模型示意圖
該巡邏機器人采用麥克納姆全向移動底盤,全向運動平臺能夠實現平移、轉動等多種功能,其靈活性、可操作性強,能夠實現全方位的運動。
1.2 機器人硬件系統設計
該系統主要硬件:麥克納姆輪底盤,STM32,樹莓派4B,多種環境傳感器。作為一臺計算機,它能對整個巡邏機器人進行全面的控制,達到多種巡邏目的。與大部分機械手控制器相比,漿果派4B性能要好得多[2]。環境感應器能夠更精確地感受到室內的環境,并能與果子派連接,進行信息的傳輸。環境傳感器包括攝像頭、溫度、煙霧、激光雷達等。
利用激光雷達對巡邏機器人進行探測,獲得探測到的目標和周邊環境的準確位置。利用該數據,機器人能夠實現自動駕駛。激光雷達連接著樹莓派,把外界情況傳送到漿果派上。巡邏機器人在巡游時,利用攝影機進行監視。相機連接著樹莓餡餅,能將所拍錄像實時上傳。機器人采用STM32運動控制器,將4臺直流電動機與之相連。……
登錄APP查看全文
猜你喜歡
中等數學(2022年2期)2022-06-05 07:10:50
小學生學習指導(低年級)(2020年6期)2020-07-25 02:31:36
小學生學習指導(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
