四足機(jī)器人腿部結(jié)構(gòu)設(shè)計(jì)與分析
2023-01-31 02:05:10胡家信秦海鵬朱小明
大眾科技 2022年11期
關(guān)鍵詞:分析
胡家信 秦海鵬 朱小明
四足機(jī)器人腿部結(jié)構(gòu)設(shè)計(jì)與分析
胡家信 秦海鵬 朱小明
(長安大學(xué)工程機(jī)械學(xué)院,陜西 西安 710064)
為了提高四足機(jī)器人的能量密度和在復(fù)雜地形下的機(jī)動(dòng)性,文章設(shè)計(jì)了一種具有四自由度的四足機(jī)器人單腿結(jié)構(gòu)。首先,參考哺乳動(dòng)物的腿部仿生拓?fù)浣Y(jié)構(gòu),搭建了四足機(jī)器人的單腿三維模型。其次,通過DH模型法,對其進(jìn)行正逆運(yùn)動(dòng)學(xué)分析,求解機(jī)構(gòu)的正逆運(yùn)動(dòng)學(xué)方程。之后,根據(jù)求得的正向運(yùn)動(dòng)學(xué)方程,利用matlab對機(jī)器人足端的運(yùn)動(dòng)空間進(jìn)行分析,繪出足端運(yùn)動(dòng)空間云圖。最后,通過速度分析和靜力學(xué)分析,得出機(jī)器人各個(gè)關(guān)節(jié)的額定轉(zhuǎn)矩,驗(yàn)證該機(jī)構(gòu)的可行性。
四足機(jī)器人;結(jié)構(gòu)設(shè)計(jì);運(yùn)動(dòng)學(xué)分析;靜力學(xué)分析
引言
隨著人類文明的進(jìn)步,人們在執(zhí)行一些危險(xiǎn)性較高、難以執(zhí)行的任務(wù)時(shí),更希望通過機(jī)器人代替人們來執(zhí)行,如在抗震救災(zāi)、高空作業(yè)、污染土壤水質(zhì)取樣等許多方面。其中,四足機(jī)器人憑借其優(yōu)越的避障能力,高效的機(jī)動(dòng)性,超高的靈活性,越來越受到人們的青睞[1]。然而目前四足機(jī)器人的負(fù)載重量較低,速度較慢,其性能有待進(jìn)一步提高,機(jī)械腿作為四足機(jī)器人的重要基礎(chǔ)部件,決定了四足機(jī)器人的核心應(yīng)用性能,當(dāng)前大多數(shù)機(jī)械腿在沖擊和推進(jìn)狀態(tài)下的機(jī)械強(qiáng)度、能量效率、總功率密度、載重量比等性能指標(biāo)都不理想[2]。為此,本文設(shè)計(jì)了一款高機(jī)動(dòng)性和高能量效率的機(jī)械腿,旨在解決上述問題。
1 機(jī)器人的腿部總體結(jié)構(gòu)設(shè)計(jì)
常見的四足機(jī)器人的腿部結(jié)構(gòu)主要有關(guān)節(jié)腿和棱柱腿,棱柱腿型的腿部結(jié)構(gòu)顧名思義由諸多連桿相互鉸接而成,腿部結(jié)構(gòu)簡單、輕巧,慣性很小[3]。然而,這種類型的腿由于旋轉(zhuǎn)關(guān)節(jié)較少而限制了自身的運(yùn)動(dòng)性能,這導(dǎo)致了其對地形的適應(yīng)性不足。與棱柱腿相比,關(guān)節(jié)腿采用旋轉(zhuǎn)關(guān)節(jié)代替直線棱柱關(guān)節(jié)來實(shí)現(xiàn)腿長控制,具有良好的幾何拓?fù)浞律浴⒏玫倪\(yùn)動(dòng)性能、更大的自穩(wěn)速度域、更寬的腿腳運(yùn)動(dòng)空間和更高的能量效率。它在復(fù)雜地形適應(yīng)和障礙物穿越方面顯示出更大的優(yōu)勢。因此,本文采用了關(guān)節(jié)腿的形式,設(shè)計(jì)了如圖1所示的四自由度(兩個(gè)主動(dòng)自由度和兩個(gè)被動(dòng)自由度)四足機(jī)器人單腿模型。

圖1 四足機(jī)器人單腿三維模型圖
圖1中,分別在單腿的髖關(guān)節(jié)、膝關(guān)節(jié)設(shè)計(jì)了一個(gè)主動(dòng)的轉(zhuǎn)動(dòng)自由度,用于控制腿部的運(yùn)動(dòng);跖骨桿、大腿桿、小腿桿以及連接桿形成了一個(gè)四桿機(jī)構(gòu),使踝關(guān)節(jié)變成了一個(gè)被動(dòng)關(guān)節(jié),跟隨髖關(guān)節(jié)和大腿關(guān)節(jié)的轉(zhuǎn)動(dòng);脛骨桿、足端和跖骨桿也是一個(gè)四桿機(jī)構(gòu),當(dāng)足端與地面接觸時(shí),足端的位置自動(dòng)跟隨地面,這樣連接關(guān)節(jié)也將被動(dòng)確定,因此,足端關(guān)節(jié)也是一個(gè)被動(dòng)自由度。在桿長的確定方面,結(jié)合實(shí)際應(yīng)用需求以及四桿機(jī)構(gòu)運(yùn)動(dòng)原理,選定大腿桿有效長80 mm,小腿桿有效長164 mm,跖骨桿有效長122 mm,連接桿的長度決定了整個(gè)機(jī)器人腿部能否達(dá)到預(yù)期位置,由于各個(gè)關(guān)節(jié)均沒有周轉(zhuǎn)副,雙搖桿機(jī)構(gòu)即可滿足需求,選定連接桿的有效長為176 mm。
2 單腿運(yùn)動(dòng)學(xué)分析
機(jī)器人的運(yùn)動(dòng)學(xué)分析就是在不考慮機(jī)構(gòu)所受力的情況下,分析系統(tǒng)的運(yùn)動(dòng)特性。具體來說就是描述末端執(zhí)行裝置與中間各桿件之間的運(yùn)動(dòng)學(xué)關(guān)系,一般可分為兩大類:正向運(yùn)動(dòng)學(xué)與逆向運(yùn)動(dòng)學(xué)。
正向運(yùn)動(dòng)學(xué)就是在已知機(jī)器人運(yùn)動(dòng)的各桿件的幾何信息和關(guān)節(jié)變量的情況下,將一個(gè)個(gè)坐標(biāo)系固結(jié)在各個(gè)桿件上,最終求解從固定不動(dòng)的基礎(chǔ)坐標(biāo)系變換到與末端執(zhí)行裝置固結(jié)的坐標(biāo)系的變換過程。反之,所謂逆向運(yùn)動(dòng)學(xué)就是在已知從基礎(chǔ)坐標(biāo)系變換到末端執(zhí)行機(jī)構(gòu)的坐標(biāo)系的情況下,來求解中間各個(gè)關(guān)節(jié)變量[4]。

圖2 正向運(yùn)動(dòng)學(xué)與逆向運(yùn)動(dòng)學(xué)轉(zhuǎn)換關(guān)系圖
本文的符號描述如下:



繞y軸旋轉(zhuǎn)的旋轉(zhuǎn)矩陣為:
繞z軸旋轉(zhuǎn)的旋轉(zhuǎn)矩陣為:

為了將平移變換和旋轉(zhuǎn)變換結(jié)合起來,可以用齊次變換矩陣綜合表示:
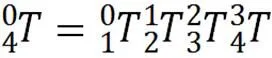
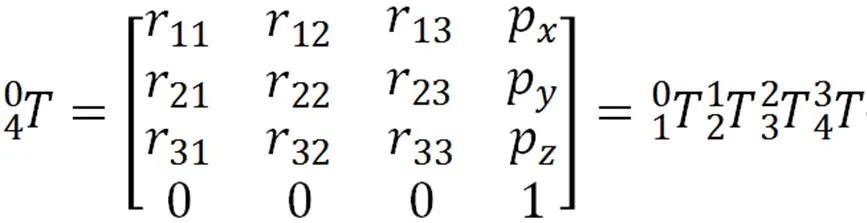
2.1 基于DH模型法的正向運(yùn)動(dòng)學(xué)求解
機(jī)器人正向運(yùn)動(dòng)學(xué)的求解方法的一般方法是DH模型法,即在機(jī)器人腿部結(jié)構(gòu)圖上建立DH坐標(biāo)系(如圖3所示),然后將相關(guān)的參數(shù)列于DH Table中,進(jìn)而根據(jù)DH Table中的數(shù)據(jù),求解齊次變換矩陣,最終列出末端執(zhí)行裝置相對于基礎(chǔ)坐標(biāo)系的正向運(yùn)動(dòng)學(xué)方程[5]。
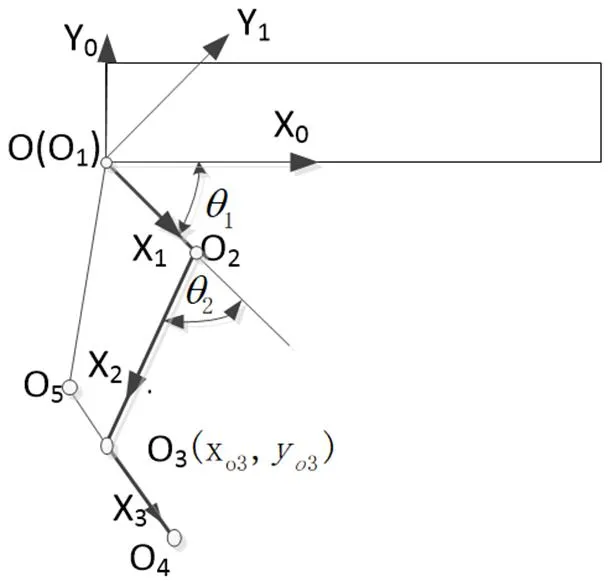
圖3 機(jī)器人腿部的DH坐標(biāo)系
根據(jù)DH模型法求解過程,將有關(guān)的DH參數(shù)列于表1中,其中,α-1為相鄰兩個(gè)Z坐標(biāo)的扭角,a-1為相鄰兩個(gè)Z坐標(biāo)的公法線的長度,d為相鄰兩個(gè)X坐標(biāo)在Z方向上的距離,θ為相鄰兩個(gè)X坐標(biāo)的夾角。

表1 單腿DH參數(shù)表
由坐標(biāo)系變換的鏈?zhǔn)椒▌t,可得出坐標(biāo)系{i-1}到坐標(biāo)系{i}的齊次變換矩陣為:
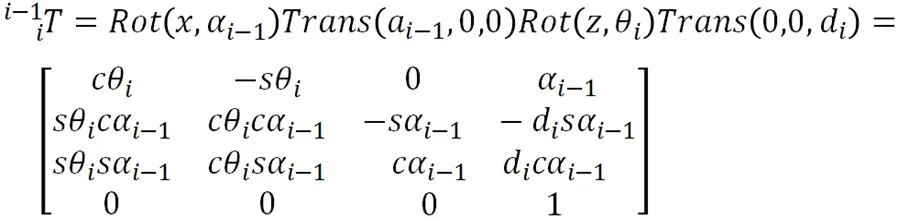

以上公式中1,2,3均為腿部各個(gè)桿件的長度,1,2,3為各關(guān)節(jié)處各個(gè)桿件的轉(zhuǎn)角。
2.2 逆向運(yùn)動(dòng)學(xué)分析

2.2.1 求解1



令兩式相等,可得:

將上式方程左右兩邊同時(shí)平方后,再相加整理可得:

為了求解式(7),可以利用三角代換得式(8),
其中,(,)是2幅角反正切函數(shù)。
將式(8)帶入式(7),并根據(jù)正弦函數(shù)與余弦函數(shù)之間的平方和為1的關(guān)系,可得式(9)如下:

于是可令:
化簡后可得到1:

上式中的正負(fù)號分別對應(yīng)兩個(gè)1的可能解,可根據(jù)機(jī)器人實(shí)際位置進(jìn)行取舍。
2.2.2 求解2


令矩陣方程左右兩邊的元素分別對應(yīng)相等可以得到式(12)如下:

之后解法可參照求解1的過程,令式(12)方程左右兩邊同時(shí)平方后相加整理化簡后可得下式:

利用三角代換可得:
式中
將式(14)帶入式(13)可得式(16)和(17)如下:


令

上式中,正負(fù)號分別對應(yīng)2的兩個(gè)可能解,可根據(jù)機(jī)器人實(shí)際位置進(jìn)行取舍。
2.3 利用蒙特卡羅法分析足端運(yùn)動(dòng)空間
為了能夠更好地分析四足機(jī)器人在運(yùn)動(dòng)時(shí)足端所能達(dá)到的空間,需要對足端進(jìn)行運(yùn)動(dòng)仿真分析,以便進(jìn)一步驗(yàn)證結(jié)構(gòu)設(shè)計(jì)時(shí)的合理性。足端空間分析在這里選擇的是蒙特卡羅分析法,首先,根據(jù)機(jī)器人腿部結(jié)構(gòu)的正向運(yùn)動(dòng)學(xué),選定1,2,3為變量,并確定各個(gè)變量的取值范圍:

隨后,為每個(gè)變量抽取隨機(jī)數(shù),使變量包含于以上范圍中,并帶入正向運(yùn)動(dòng)學(xué)方程,即可求得一個(gè)足端在笛卡爾坐標(biāo)系下的坐標(biāo)位置。將這個(gè)過程重復(fù)1 000 000次,可以得到足端運(yùn)動(dòng)空間云圖如圖3所示。
圖3-坐標(biāo)系下的足端運(yùn)動(dòng)空間圖
由圖3可知,足端在髖關(guān)節(jié)處的基礎(chǔ)坐標(biāo)系中所能達(dá)到的位置主體大多位于軸之下,且基本關(guān)于坐標(biāo)系對稱,基本符合哺乳動(dòng)物后腿足端運(yùn)動(dòng)的要求。
3 靜力學(xué)分析與額定扭矩計(jì)算
為了合理的選擇關(guān)節(jié)處的驅(qū)動(dòng)器,首先要對四足機(jī)器人的腿部進(jìn)行速度分析,得到從笛卡爾坐標(biāo)系映射到關(guān)節(jié)坐標(biāo)系的雅可比矩陣,其次進(jìn)行靜力學(xué)分析,根據(jù)機(jī)器人腿部所受的足端力和足端速度,通過雅可比計(jì)算出所需的關(guān)節(jié)力和關(guān)節(jié)速度,據(jù)此選擇合理的關(guān)節(jié)驅(qū)動(dòng)器。
3.1 速度分析
速度分析是研究機(jī)器人運(yùn)動(dòng)的基礎(chǔ),它同運(yùn)動(dòng)學(xué)分析一樣,也分為正解和逆解,從關(guān)節(jié)坐標(biāo)系下的轉(zhuǎn)動(dòng)速度計(jì)算出笛卡爾坐標(biāo)系下的運(yùn)動(dòng)速度稱之為速度分析的正解,反之,從笛卡爾坐標(biāo)系下的運(yùn)動(dòng)速度計(jì)算出關(guān)節(jié)坐標(biāo)系下的關(guān)節(jié)轉(zhuǎn)動(dòng)速度稱之為速度分析的逆解。
在本此設(shè)計(jì)中,髖關(guān)節(jié)和膝關(guān)節(jié)是主動(dòng)自由度,踝關(guān)節(jié)處的運(yùn)動(dòng)通過四桿機(jī)構(gòu)可以被動(dòng)確定,因此,速度分析和靜力學(xué)分析時(shí),只需要計(jì)算髖關(guān)節(jié)和膝關(guān)節(jié)處的速度和所受的外力即可。

圖4 四足機(jī)器人速度分析示意圖




此處可令


這里,J為雅可比矩陣。由此,式(21)可以簡化為:

上式便是四足機(jī)器人腿部結(jié)構(gòu)速度分析的正解,而速度分析的逆解便是在式(23)等式左右兩邊同時(shí)左乘雅可比矩陣的逆,即可得到速度分析的逆解:

3.2 靜力學(xué)分析
機(jī)器人的靜力學(xué)分析的是指機(jī)器人在靜止或者低速運(yùn)動(dòng)的情況下,研究機(jī)器人各部分桿件所受的外力或者各桿件之間的相互作用力[6]。本文中,主要根據(jù)機(jī)器人所受的足端力來求解各關(guān)節(jié)所需的驅(qū)動(dòng)力矩。圖5為本文的四足機(jī)器人單腿結(jié)構(gòu)的靜力學(xué)受力分析簡圖。
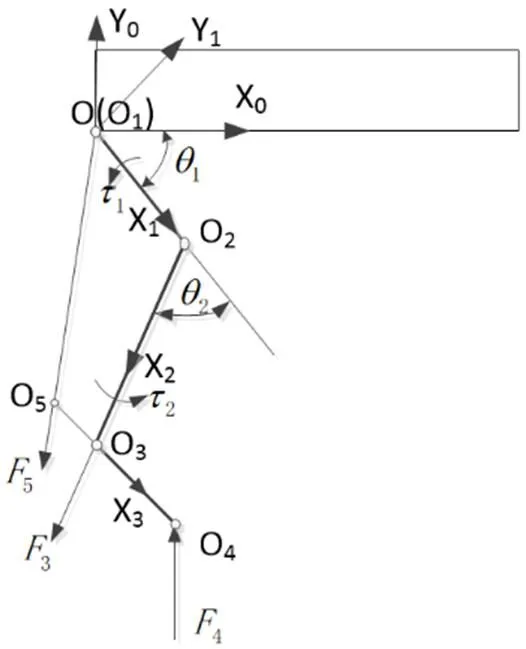
圖5 四足機(jī)器人單腿靜力學(xué)分析圖
根據(jù)圖5所示,四足機(jī)器人的足端受到來自地面對其的支撐反力,其大小和方向均已知,方向沿桿方向,其豎直方向上的分力大小等于機(jī)器人承受的載荷。為了方便求解膝關(guān)節(jié)、髖關(guān)節(jié)處所需的驅(qū)動(dòng)力矩,可以將大腿桿、小腿桿分離出來單獨(dú)分析,其受力如圖6所示。
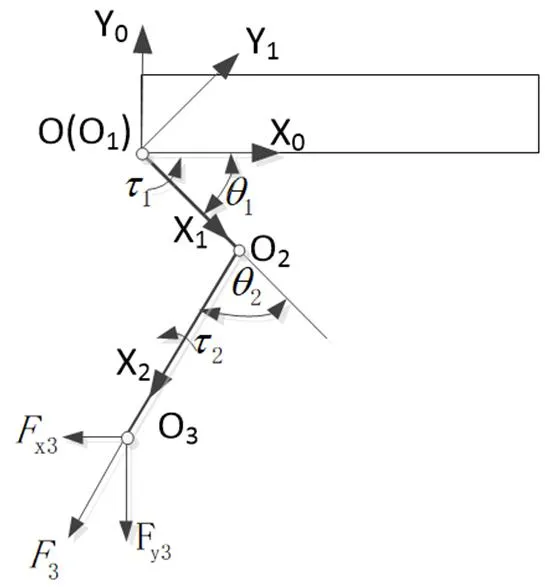
圖6 四足機(jī)器人單腿部分結(jié)構(gòu)受力分析簡圖
根據(jù)虛功原理,處于平衡狀態(tài)下的物體總虛功為零,得:

上式方程左右兩邊同時(shí)積分并簡化可得:

上式中,J為雅可比矩陣,展開得:

將具體數(shù)據(jù)代入計(jì)算可得,假定承載要求為20 kg,在靜止的情況下,單腿的承載能力最大為5 kg,再將足端載荷轉(zhuǎn)換到踝關(guān)節(jié)處可得踝關(guān)節(jié)的受力為3。因此,通過在3左乘雅可比矩陣的轉(zhuǎn)置可得髖關(guān)節(jié)和膝關(guān)節(jié)的額定扭矩為:

其中J為雅可比矩陣得轉(zhuǎn)置。
4 結(jié)束語
本文首先根據(jù)實(shí)際運(yùn)用需求確定了機(jī)器人腿部的總體結(jié)構(gòu)和大致尺寸,利用solidworks對機(jī)器人腿部進(jìn)行三維建模。其次,利用DH模型法對其進(jìn)行正逆運(yùn)動(dòng)學(xué)分析,求解機(jī)構(gòu)的正逆運(yùn)動(dòng)學(xué)方程。之后,根據(jù)求得的正向運(yùn)動(dòng)學(xué)方程,利用matlab對機(jī)器人足端的運(yùn)動(dòng)空間進(jìn)行分析,繪出足端運(yùn)動(dòng)空間云圖。最后,對四足機(jī)器人單腿進(jìn)行速度分析和靜力學(xué)分析,得出機(jī)器人各個(gè)關(guān)節(jié)的額定轉(zhuǎn)速和額定轉(zhuǎn)矩。因此,本文對設(shè)計(jì)的四足機(jī)器人單腿進(jìn)行了充足的理論分析,具有很高的可行性,更好的幾何拓?fù)浞律裕\(yùn)動(dòng)性能,更大的自穩(wěn)速度域,更寬的腿腳運(yùn)動(dòng)空間和更高的能量效率,它在復(fù)雜地形適應(yīng)和障礙物穿越方面顯示出更大的優(yōu)勢。
[1] HYUN D J, SEOK S, LEE J, et al. High speed trot-running: Implementation of a hierarchical controller using proprioceptive impedance control on the MIT Cheetah[J]. International Journal of Robotics Research, 2014, 33(11): 1417-1445.
[2] 李鵬飛. 四足機(jī)器人結(jié)構(gòu)設(shè)計(jì)與運(yùn)動(dòng)學(xué)仿真分析[D]. 昆明: 昆明理工大學(xué),2019.
[3] 馬宗利,劉永超,朱彥防,等. 奔跑四足機(jī)器人腿結(jié)構(gòu)設(shè)計(jì)與分析[J]. 東北大學(xué)學(xué)報(bào)(自然科學(xué)版),2016,37(9): 1305-1310.
[4] SEN M A, BAKIRCIOGLU V, KALYONCU M. Inverse kinematic analysis of a quadruped robot[J]. International Journal of Scientific and Technology Research, 2017, 6(9): 285-289.
[5] 張千偉,張龍. 仿生四足機(jī)器人結(jié)構(gòu)設(shè)計(jì)與運(yùn)動(dòng)學(xué)分析[J]. 兵工自動(dòng)化,2017,36(5): 73-76.
[6] WANG H, SANG L, HU X, et al. Kinematics and dynamics analysis of a quadruped walking robot with parallel leg mechanism[J]. Chinese Journal of Mechanical Engineering, 2013, 26(5): 881-891.
Design and Analysis of Leg Structure of Quadruped Robot
In order to improve the energy density and maneuverability of the quadruped robot in complex terrain, a single-leg structure of the quadruped robot with four degrees of freedom is designed in this paper. Firstly, referring to the mammalian leg bionic topology, a single-leg 3D model of the quadruped robot is built. Secondly, the forward and inverse kinematics of the quadruped robot are analyzed by DH model method, and the forward and inverse kinematics equations of the mechanism are solved. Afterwards, according to the obtained forward kinematics equations, use matlab to analyze the motion space of the robot foot, and draw a cloud map of the foot motion space. Finally, through speed analysis and static analysis, the rated torque of each joint of the robot are obtained to verify the feasibility of the mechanism.
quadruped robot; structural design; kinematics analysis; statics analysis
TP242
A
1008-1151(2022)11-0001-05
2022-08-23
胡家信(1997-),男,長安大學(xué)工程機(jī)械學(xué)院在讀碩士研究生,研究方向?yàn)闄C(jī)器人控制。
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會(huì)科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
- 大眾科技的其它文章
- 心理護(hù)理對老年冠心病介入治療患者心理應(yīng)激、睡眠質(zhì)量的影響研究
- 基于Python的車牌識別系統(tǒng)實(shí)現(xiàn)
- 廣西面向東盟的跨境電商賣家融資需求分析及信用保險(xiǎn)保單融資金融解決方案研究——基于南寧跨境電商綜合試驗(yàn)區(qū)建設(shè)
- 基于區(qū)塊鏈的社交網(wǎng)絡(luò)輿情監(jiān)測與治理研究
- 基于“雙一流”與“雙創(chuàng)”的創(chuàng)新創(chuàng)業(yè)能力培養(yǎng)模式的探索與實(shí)踐——以資源環(huán)境學(xué)科研究生為例
- 中醫(yī)護(hù)理聯(lián)合集束化護(hù)理對重癥急性胰腺炎患者影響的Meta分析