純電動汽車制動能量回收策略研究與仿真分析
2023-01-17 07:16:48秦攬悅
江蘇理工學院學報 2022年6期
關鍵詞:控制策略
秦攬悅,李 麗
(江蘇理工學院 汽車與交通工程學院,江蘇 常州 213001)
隨著經濟社會的發展,我國汽車保有量越來越大,由此引發的環境污染和化石能源緊缺問題也愈加嚴重。由于具有零排放、零污染的優勢,純電動汽車已逐漸成為汽車領域研究的熱點[1]。目前,純電動汽車大多采用蓄電池作為主要動力源,由于蓄電池普遍功率密度較小,導致汽車續航里程偏低,嚴重阻礙了純電動汽車的產業化進程。開發高性能動力電池無疑能夠有效增加純電動汽車的續航里程,然而,短期內相關技術的商業化應用尚存在一定困難;因此,如何高效利用電動汽車上所搭載的有限能量,成為亟待解決的問題。
制動能量回收是提高蓄電池能量利用效率的有效方法之一[2]。電動汽車在進行減速制動時會產生大量的動能,這些能量大部分會轉化為熱能發散,造成能量浪費。制動能量回收是指在汽車進行減速或剎車等制動行為時,將產生的部分動能轉化為電能,并貯存到蓄電池中,從而為后續汽車的驅動過程補充能量[3-4]。目前,國內外研究者對能量回收策略進行了大量的研究。Siddartha等人[5]提出了一種新的制動能量回收策略,在原有控制策略的基礎上對車輛前后輪的制動力進行重新分配,從仿真結果可以看出,該控制策略可以將制動能量的回收效率增加30%以上;但該方法并未考慮電池荷電狀態(State of Charge,SOC)對制動能量回收的影響。Panagiotidis等人[6]在并聯混合動力汽車的基礎上構建了基于駕駛人意圖的制動模型,并對所設計的能量回收模型進行了仿真驗證,結果表明,所設計的能量回收模型能夠使混合動力汽車的燃油經濟性和續航里程得到顯著提高;但研究中沒有考慮到影響再生制動的因素。高愛云等人[7]以并聯式混合動力汽車為例,提出了一種基于最佳制動效果的制動能量回收控制策略,并利用ADVISOR對其進行仿真分析,在此基礎上進行了硬件在環仿真試驗,結果顯示,該控制策略可以有效提高汽車的能量利用率和人員的駕駛舒適性;但該研究中未考慮到車速v對制動能量回收的影響。
由于純電動汽車制動能量的回收是一個非常復雜的過程,受到諸多因素的影響且總體上呈非線性變化;因此,其與模糊控制方法的實際應用場合非常匹配。本文在已有研究的基礎上,以后驅動式純電動汽車作為研究對象,提出了一種基于模糊控制的制動能量回收策略。通過引入SOC作為考慮因素,在Matlab/Simulink中搭建了控制策略的仿真模型,并嵌入到基于ADVISOR搭建的純電動汽車整車模型中,在NEDC及FTP75工況下對該控制策略進行了仿真分析。結果表明,本文所設計的能量回收策略能夠有效地提高純電動汽車的續航里程和整車能量利用率。
1 制動能量回收原理
如圖1所示,純電動汽車的制動系統主要以電機制動為主,其主要結構包括傳感器、制動控制器、電機等。當電機制動時,其輸出轉矩為負值,轉速下降,在實現減速剎車的同時將部分動能轉化為電能貯存在蓄電池中。
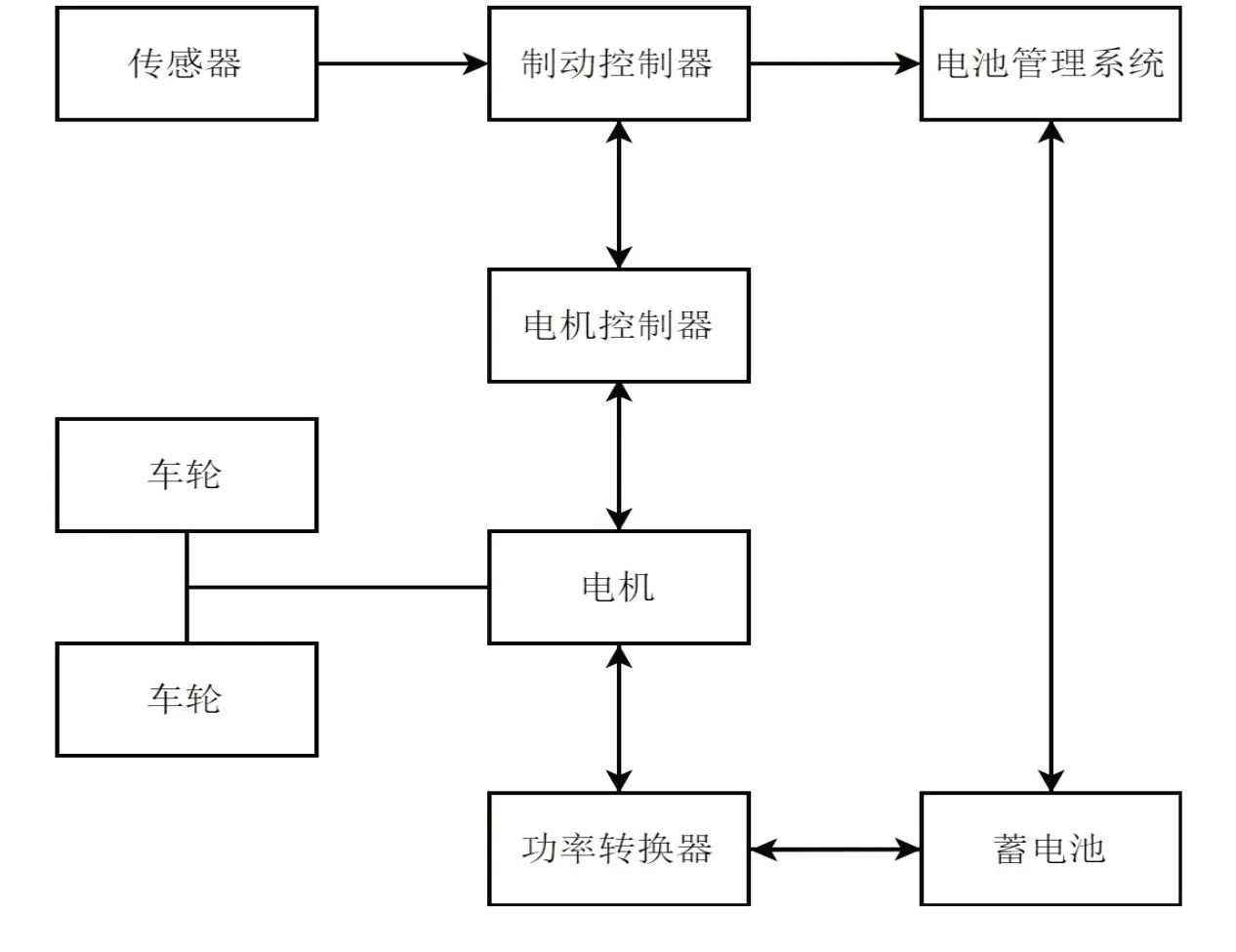
圖1 電機制動系統結構
單純的電機制動并不能完全滿足汽車行駛過程中的制動力需求;因此,目前純電動汽車的制動力由電機制動力和機械制動力兩部分組成,并由制動控制器基于制動信號進行制動力分配。為了提高純電動汽車的能量利用率和續航里程,電機制動和機械制動相結合的制動系統應當在保證汽車安全性的同時,盡量增加電機制動的制動力占比,以提高純電動汽車的經濟性。
2 制動能量回收策略制定
制動能量回收策略的制定包括兩個要點:一是對汽車的前輪和后輪的制動力進行分配;二是對驅動輪上的電機制動力和機械制動力進行分配。ADVISOR自帶的制動力分配策略僅以汽車的當前車速作為依據,根據車速查表來實現對制動力的分配。如圖2所示,為具體控制規則。根據圖2,ADVISOR自帶的制動力分配策略只考慮車速對制動力分配的影響,沒有考慮到其他因素。然而,影響再生制動的因素很多,如SOC反映了電池的剩余電量,它直接影響了電池充電的效率,從而對制動能量回收的效率產生影響[8]。因此,使用該控制策略所回收的能量十分有限,汽車制動時所產生的大部分能量未能得到有效利用[9]。為達到對制動力更加精準的控制,進一步提高制動能量的利用率,本文在ADVISOR自帶控制策略的基礎上,將SOC對制動力的影響列入到考察之中,通過分析車速v和電池SOC對制動力分配的影響,來研究制動力分配策略,并確定其分配方案。
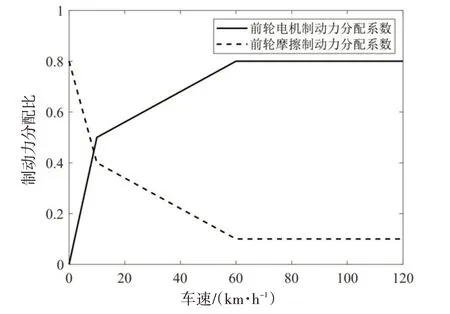
圖2 ADVISOR制動力分配曲線
2.1 制動力分配方案
本文以電池SOC以及車速v作為輸入量,以電機制動力占比K為輸出量,對電機制動力和機械制動力進行分配,并通過制動系統實現制動及制動能量的回收。如圖3所示,為控制策略流程。根據圖3,總制動力包括電機制動力和機械制動力兩部分:電機制動力占比為K,它決定了電機制動力的大小;相應的,機械制動力占比為1-K。設定在后輪總制動力未超過最大限度時,前輪機械制動力與后輪機械制動力相同,為(1-K)/2,當后輪總制動力達到最大限度時,前輪機械制動力為總制動力減去后輪總制動力[10]。
2.2 模糊控制器設計
影響制動能量回收的因素很多,模糊控制相對于其他控制方法能夠更好地應對這種復雜場景;因此,本文選擇模糊控制策略。根據圖3,模糊控制器以電池SOC以及車速v作為輸入量,以電機制動力占比K為輸出量。

圖3 控制策略流程圖
2.2.1 隸屬度函數確定
在設計模糊控制器時,首先,要確認論域范圍和模糊子集的數量;其次,確定各個輸入、輸出變量隸屬度函數的范圍和形狀。
(1)電池SOC
電池SOC表示剩余電量,SOC的大小直接決定著電動汽車的充電效率和續航里程:SOC越高,電池充電效率越低;SOC越低,電池充電效率越高。本文將電池SOC的論域范圍設置為[0,1],并劃分為{低,中,高}三個模糊子集,分別以{S,M,B}表示。其中:S、B選用高斯型函數;M選用鐘形函數。如圖4所示,為電池SOC隸屬度函數。

圖4 電池SOC隸屬度函數
(2)車速v
車速v是影響能量回收效率的重要因素:車輛在低速行駛時,可被回收能量較少;在高速行駛時,電機制動的參與率增大,此時可被回收的能量增多。本文將車速v的論域設置為[0,80],劃分為{低速,中速,高速}三個模糊子集,分別用{S,M,B}表示,選用梯形函數作為隸屬度函數類型。如圖5所示,為車速v隸屬度函數。

圖5 車速v隸屬度函數
(3)電機制動力占比K
將電機制動力占比K的論域設定為[0,1],再劃分為{極小,小,中,大,極大}五個模糊子集,分別用{VS,S,M,B,VB}表示,選用三角形作為隸屬度函數類型。其中:VS表示僅有機械制動,電機沒有參與制動;S表示電機制動比例很小;M表示電機參與制動的程度屬于中等水平;B表示電機參與制動的程度為中等偏大,比M略多;VB表示主要為電機制動。如圖6所示,為電機制動力占比K隸屬度函數。

圖6 電機制動力占比K隸屬度函數
2.2.2 模糊控制規則制定
在模糊控制規則制定模塊,采用If-Then形式,即if SOC is A andvis B,then K is C。通過對純電動汽車能量管理問題的研究,本文所提出的模糊控制規則其原則主要包括:當SOC較高時,表示電池剩余電量較多,此時電機不制動或制動比例小;當電池SOC處于中間或較低時,此時電機制動比例大;當車速v較低時,可回收制動能量很少,電機基本不參與制動;當車速v較高時,可回收制動能量多,此時電機制動比例增大。如表1所示,為根據以上原則建立的模糊控制規則。如圖7所示,為模糊推理曲面圖。
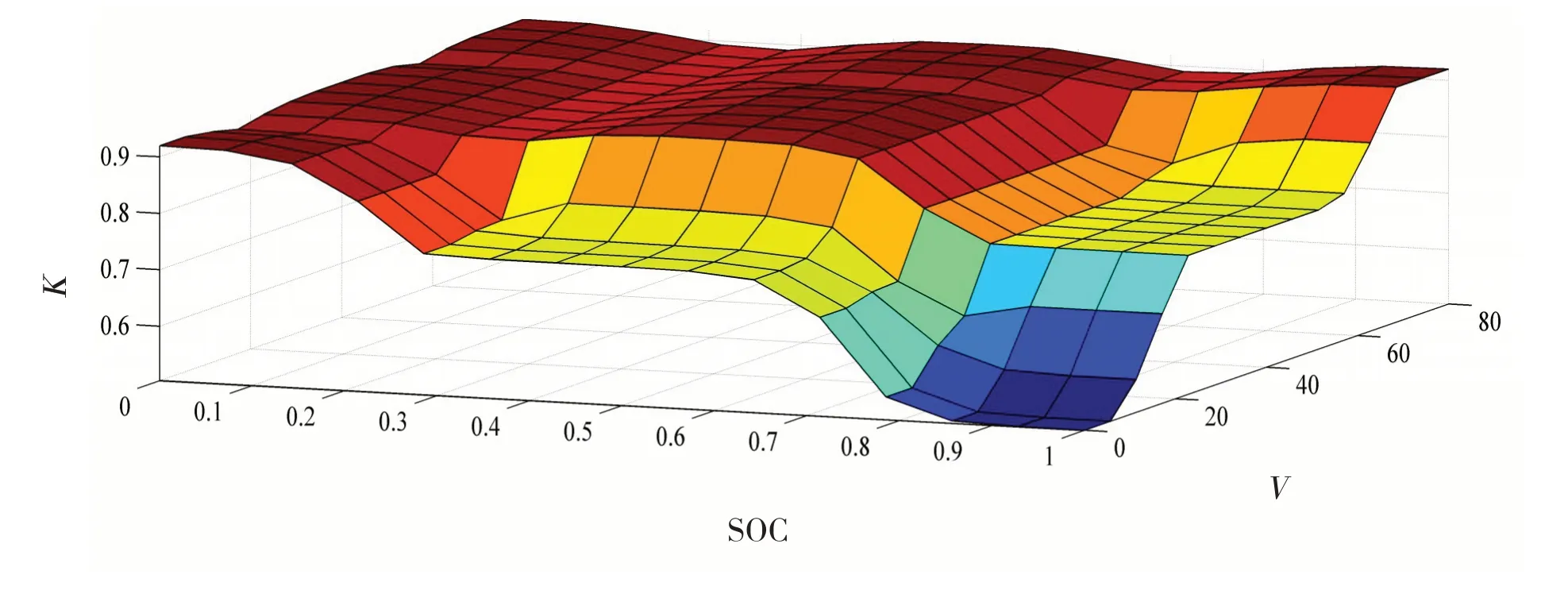
圖7 模糊推理曲面圖

表1 模糊控制規則表
3 ADVISOR建模與仿真分析
為了驗證本文所設計制動能量回收策略的有效性,將所搭建的能量回收策略模型與后驅純電動汽車模型相結合,并通過ADVISOR軟件進行仿真分析。
3.1 整車模型搭建
本文以軟件自帶的(BD_EV)整車模型為原型,根據從官方網站查詢所得的某后驅電動汽車相關參數,對自帶模型的各部件m文件內容進行修改,并將驅動模式由自帶模型中的前輪驅動更改為后輪驅動,從而搭建出所需要的整車模型。如表2所示為主要參數。

表2 某后驅純電動汽車主要參數
3.2 仿真結果與分析
與本文控制策略相比,ADVISOR自帶的控制策略是固定分配比例,其分配方式是只按照車速去分配制動力,并沒有充分考慮到電池SOC、電機的特性以及汽車所行駛的道路狀況等因素,因而具有一定的局限性。為了評價本文所提出的制動能量回收策略是否能有效提高純電動汽車的經濟性,將車輛驅動模式由前驅改為后驅,并將所制定控制策略Simulink模型添加到ADVISOR整車模型中。如圖8、圖9所示,為修改后的前向仿真模塊和后向仿真模塊。選取NEDC以及FTP75工況作為仿真工況,將本文控制策略與ADVISOR軟件自帶控制策略就電機扭矩、電池電流、電池SOC、續航里程以及整車能量效率等五個方面進行仿真對比。
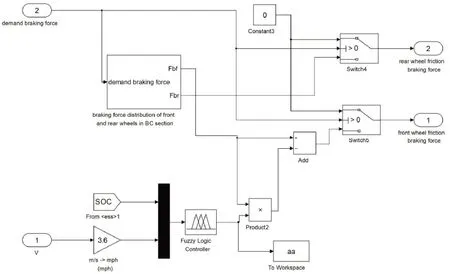
圖8 制動力前向仿真模塊

圖9 制動力后向仿真模塊
3.2.1 電機扭矩對比
如圖10所示,為電機扭矩在各工況下仿真的變化過程。圖10顯示,在兩種工況下,使用ADVISOR自帶控制策略與本文設計的控制策略,其電機正扭矩都是重合的;這是因為電機扭矩大于0時,汽車處于驅動狀態,而本文只是對制動策略進行了修改,并沒有改變驅動策略,因此,當汽車處于驅動狀態時,兩種控制策略的正扭矩相同,這是合理的。當汽車處于制動狀態時,即電機扭矩小于0時,在兩種工況下,本文所設計的控制策略均能使電機負扭矩大于使用ADVISOR自帶控制策略時的負扭矩,即當汽車處于制動狀態時,采用本文所設計的控制策略可使電機制動力占比較大,從而有利于制動能量的回收。

圖10 電機扭矩對比
3.2.2 電池電流對比
如圖11所示,為電池電流在各工況下仿真的變化過程。圖11顯示,在兩個工況下,ADVISOR自帶控制策略與本文控制策略在電流大于0時的電池電流是重合的。這是因為電池電流大于0代表汽車處于驅動狀態,此時電池正在放電,但由于本文只對制動策略進行了修改,所以當汽車處于驅動狀態時,兩種控制策略的電池電流相同。當汽車處于制動狀態時,電池電流小于0,此時電池處于充電狀態,在兩個工況下,本文所設計的控制策略均能使電池充電時的電流明顯大于ADVISOR自帶控制策略下的電流。充電電流越大,相同時間下為電池所補充的電量就會越多,相應電池電量下降速度就越慢。這表明在本文控制策略下,電池電量下降速度更低,與原始控制策略相比,可以提高電池的續航時間,進而減少電池的充放電次數,提高電池使用壽命。

圖11 電池電流對比
以上分析表明,本文所設計的控制策略可使汽車具有更高的電機制動力占比和更大的充電電流,而這兩者會使電池SOC下降更加緩慢,進而增大汽車續航里程。
3.2.3 電池SOC對比
如圖12所示,為電池SOC在各工況下的變化過程。圖12顯示:隨著時間的推移,電池SOC值總體上呈現逐漸降低的趨勢,但有些地方出現了小幅的升高,這表示此時制動能量正在被回收。在兩種工況下,采用本文控制策略的純電動汽車其SOC值降低幅度均小于采用ADVISOR自帶控制策略的汽車。在NEDC工況下,使用ADVISOR自帶控制策略進行一個工況循環后,SOC值為0.974 9;使用本文控制策略進行一個工況循環后SOC值為0.975 7,提高了0.08%。在FTP75工況下,使用ADVISOR自帶控制策略的SOC值為0.955 8;使用本文控制策略的SOC值為0.958 8,提高了0.3%。
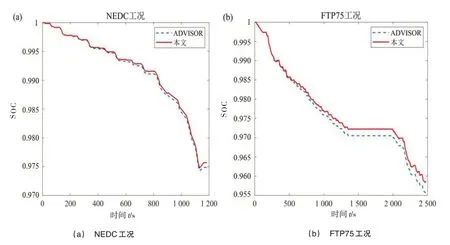
圖12 SOC對比
值得注意的是:NEDC工況一個循環全長為10.93 km,持續時間為1 184 s;FTP75工況一個循環全長為19.77 km,持續時間為2 277 s。單個工況循環的時間和行駛里程數都較短,因此,相應SOC值提高幅度并不是很大;但若考慮到汽車的整個續航里程,相應的改善程度就會較為顯著。作為驗證,以下將對兩種控制策略下的續航里程進行對比。
3.2.4 續航里程對比
如圖13所示,為續航里程在各工況下仿真的變化過程。圖13顯示:在本文控制策略下,兩個工況的續航里程均大于采用ADVISOR自帶控制策略下的續航里程。在NEDC工況下,原始控制策略續航里程為326.2 km,本文控制策略續航里程為348.5 km,提高了6.84%;在PTF75工況下,原始控制策略續航里程為302.8 km,本文控制策略續航里程為334.2 km,提高了10.37%。續航里程的提升,主要是由于電機制動力占比增大,從而提高了制動能量的回收效率。

圖13 續航里程對比
3.2.5整車能量效率對比
整車能量效率也是評價制動能量回收的重要指標之一。如圖14所示,為不同工況下兩種控制策略的整車能量效率的對比結果。圖14顯示:在兩種工況下,使用本文控制策略的整車能量效率均大于ADVISOR原始控制策略下的整車能量效率。本文控制策略的整車能量效率在NEDC工況下,比原始控制策略高3.5%;在FTP75工況下,比原始控制策略高6.8%。
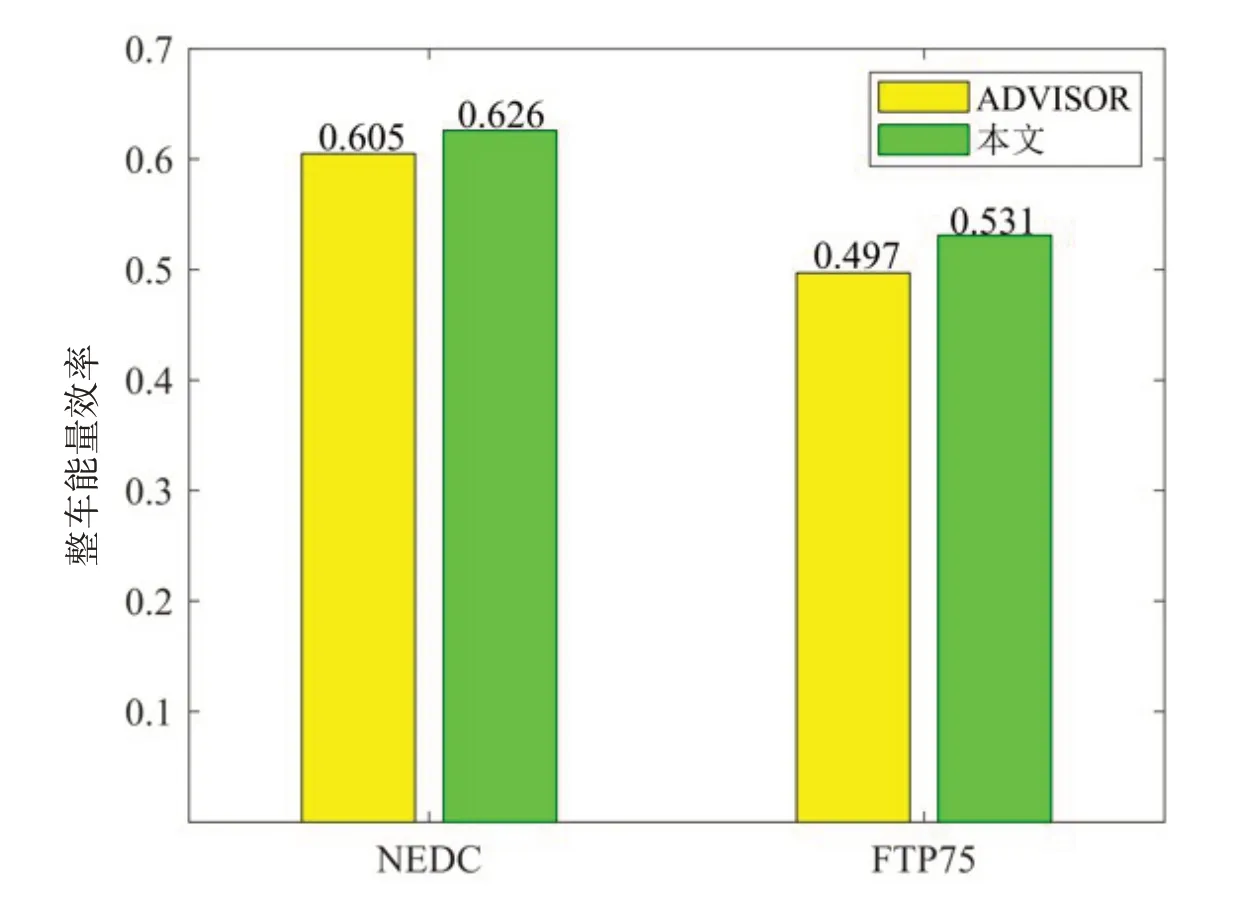
圖14 整車能量效率對比
4 結語
本文以后驅純電動汽車為研究對象,對純電動汽車的制動能量回收策略進行研究。基于模糊控制策略設計能量回收策略,以電池SOC和車速v為輸入變量,以電機制動力占比K為輸出變量設計模糊控制器,對制動力進行合理分配;并通過ADVISOR軟件進行仿真分析,在NEDC和FTP75工況下,將ADVISOR自帶控制策略與所設計控制策略的電機扭矩、電池電流、電池SOC、續航里程以及整車能量效率進行對比。仿真結果表明,本文提出的制動能量回收策略,能夠有效提高純電動汽車的續航里程和能量利用率。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36