基于馬賽克戰的分布式聚合作戰概念推演與驗證
2023-01-17 13:02:10葛魯親王越欣顧灝冰
系統仿真技術 2022年4期
葛魯親,劉 瑞,陳 都,王越欣,高 璞,顧灝冰
(上海機電工程研究所,上海 201109)
作戰概念開發對作戰體系構建、裝備體系發展和戰爭勝負有著至關重要的影響,是軍事思想的核心體現和作戰能力的“倍增器”。美軍在軍事變革、裝備建設和作戰實踐中,提出了一系列新型作戰概念,如“分布式殺傷”“馬賽克戰”“多域戰”等,都在一定時期內、某種程度上影響了美軍的裝備建設和作戰轉型,推動美軍作戰向全域化、體系化、智能化方向發展。
其中,馬賽克戰以“殺傷網”取代“殺傷鏈”,通過作戰節點高度分散、整個系統的韌性和較多的冗余節點,增強了“殺傷網”的多手段殺傷能力和抗毀能力,具有鮮明的分散、彈性、智能化特征。
隨著現代作戰網絡化、信息化、智能化程度持續提升,以巡航導彈集群、無人機蜂群為代表的新型威脅逐步成為現實,亟需探索新型智能化防御作戰概念,滿足未來攻防作戰中集群博弈對抗需求。
1 作戰概念發展概述
作戰概念是設計未來戰爭、推動軍事變革的重要理論抓手[1]。當前,美軍對作戰概念并沒有明確的定義,但美軍作戰概念并不是一個抽象的概念,其圍繞未來5-15年內中長期安全挑戰與威脅,針對軍事力量的運用與建設而提出理性思考,詳細構想了美軍未來的部隊編制、作戰樣式、裝備體系建設等一系列軍事問題,并經過一系列開發和實踐驗證評估,形成了指導美軍未來裝備建設和作戰體系研究的具體文件[2]。
美軍基于“作戰構想體系、作戰概念體系和作戰條令體系”三位一體的作戰理論體系,采用“基于能力,概念驅動”的方法推進理論創新和軍事轉型,摸索一套“作戰需求牽引,多維聯合驗證”的作戰概念開發機制[3]。
一是重視作戰概念的創新和提煉,一方面在實戰經驗中發掘新概念,或借鑒先進技術和管理方法,探索新穎作戰樣式和應用模式,其次由參聯會主導,對軍事創新中所提出的思想、觀點和概念用法規文件的形式加以整理,用權威軍事文件加以完善。典型案例包括“空地一體戰”“網絡中心戰”等[4-5]。二是以“螺旋方針”實現作戰概念開發,為化解聯合軍種之間的矛盾,美軍注重對理論資源的研究,通過合理組織相關指導機構,在軍種內部設立教育與訓練司令部,專職于各軍種作戰理論創新,并整合相關軍事院校、科研機構和智庫等研發力量,從前沿技術成果和商業運營模式中汲取靈感,應用于軍事領域創新,典型案例包括“馬賽克戰”等[6]。三是通過實兵演練來檢驗作戰概念,美軍通過計算機模擬技術建立相關作戰實驗室,通過高頻次實施戰役、戰術,跨軍種聯合或跨國的軍事演習,使作戰理論進一步優化,讓戰場設計、作戰行動和保障行動趨向精確化,典型案例包括“多域戰”“遠征前沿基地”等[7-8]。
作戰概念開發創新,正成為設計未來戰爭和軍隊建設發展的戰略支點與杠桿。隨著作戰體系結構建模技術和計算機仿真技術的快速發展,現階段可在仿真環境中對作戰要素、作戰要素組織關系、作戰信息交換進行戰場物理信息域快速建模;對作戰實體行為、作戰過程活動、作戰事件跟蹤進行戰場邏輯域快速建模。利用體系快速推演仿真工具對制勝機理驗證評估,有助于指揮官和科研人員對作戰概念深入理解和二次開發。
2 作戰概念建模驗證方法
2.1 作戰概念建模方法
當前,用于作戰研究的建模方法主要包括基于模型的系統工程(MBSE)方法、基于復雜網絡建模、基于指控鏈建模、基于能力優先建模、基于Agent 的建模技術、基于網絡建模、基于Petri 網建模、基于結構分解建模和基于實體建模開發等。其中,MBSE 方法可用于對復雜作戰體系建模,可反映系統規劃、需求、結構、功能等系統數字模型,為全生命周期不同階段、不同領域的參與者從不同視角觀察同一個體系。采用MBSE方法開展體系作戰概念建模,對作戰概念的建模要素進行分析,研究作戰概念背景、作戰力量、作戰任務、指揮關系、作戰活動、能力需求等作戰問題。
2.2 作戰概念驗證方法
作戰概念大多是針對未來作戰設計,驗證設計階段可能沒有部隊和裝備可供使用,需要充分利用計算機模擬技術,加上AI人工智能、大數據、云計算等新興技術,概念設計以計算機模擬為主,以實兵演練為輔,采用“虛實結合”的技術手段,為作戰概念驗證提供技術支撐[9]。
以現有作戰試驗系統為基礎,結合計算機模擬技術,基于作戰概念驗證需求,構建支撐作戰概念應用的數據資源體系和仿真資源體系,增添概念模型轉化、作戰方案生成、作戰效能評估、驗證結果展示、驗證過程管理等系統功能,能夠進行大樣本自主推演,直觀展現作戰場景,為戰略、戰術級海量單元對抗的作戰概念驗證提供支撐。
兵棋推演具有組織靈活性高、對接裝備實戰性強等特點,可發揮設計人員在作戰概念驗證中的作用,將指揮和參謀人員置于動態不可預測的對抗環境中,訓練其對特定戰術、技術、武器系統和傳感器的運用能力。通過拓展兵棋系統的概念驗證相關數據和演示分析系統功能,將各類兵棋系統進行整合,形成涵蓋戰略、戰役、戰術多層次的兵棋推演體系,使其成為作戰概念驗證的重要手段。
實兵演練充分利用部隊實兵演習訓練活動,依托模擬交戰系統,設計作戰概念驗證方案,在近似實戰的環境中組織“虛實結合、等效驗證”等作戰方式,對作戰概念進行專項演練驗證。實兵演練驗證結果可信度高、效果直觀,但是無法使用作戰概念涉及的新型作戰裝備和信息交互方式,大多作為一種作戰概念驗證的輔助手段。
3 基于體系推演的作戰概念建模與驗證方法
基于體系推演的作戰概念建模與驗證流程主要包括5 個步驟,通過以作戰需求為牽引,以作戰概念為核心,基于作戰需求和制勝機理分析,基于DODAF2.0框架[10],完成作戰體系邏輯架構建模,基于典型場景的體系推演完成作戰概念效能驗證,并通過作戰機理判識與需求匹配,確保作戰概念準確反映制勝機理和滿足作戰需求。驗證方法主要流程如圖1所示[11]。

圖1 基于體系推演的作戰概念建模與驗證方法流程Fig.1 Modelling and verification method process of combat concept based on system combat
3.1 作戰需求分析
作戰需求分析是將作戰概念中抽象的作戰要素具體化,是在一定背景下的作戰想定。明確想定中應用背景、任務邊界和預期能力,梳理作戰概念中的威脅目標、作戰任務和作戰能力等清單,并按照任務優先級梳理體系作戰任務清單和體系作戰功能需求,根據能力需求驗證結果調整解決方案,形成武器裝備需求方案清單。
3.2 制勝機理分析
制勝機理是在特定時空條件下,根據敵方作戰體系特點,為戰勝敵人而提出的作戰路徑及力量優勢原理[12]。在聯合體系對抗中,制勝機理根據其作用原理可分為作戰路徑型和塑造力量優勢型。
作戰路徑型主要是通過界定作戰力量的使用方向,對敵方作戰體系關鍵節點、作戰重心等要害部位進行破擊,癱瘓其戰斗力,獲取戰場部分控制權或對敵方關鍵體系節點摧毀,使敵方作戰體系失能或瓦解。典型作戰路徑型作戰概念包括有人/無人穿透性制空作戰、全球快速打擊戰、網電攻防戰等。
塑造力量優勢型主要是通過提升己方作戰體系在速度、精準、規模、認知、決策、協同、抗毀等一個或幾方面的能力,通過集中體系綜合優勢作戰力量,實現對目標的信息主導、精打要害和聯合制勝。典型塑造力量優勢型作戰概念包括空海一體戰、決策中心戰、馬賽克戰、一體化防空-火控、遠征前沿基地作戰、聯合全域作戰等。
制勝機理分析需從整體、全局、全過程對作戰概念精準剖析,研究作戰概念涉及的實體要素、信息交互、作戰流程,并針對性進行體系架構建模。
3.3 架構邏輯建模
基于DoDAF2.0 框架,繪制OV-1 作戰概念視圖、OV-2 作戰單位關系視圖、OV-5b 作戰活動視圖、OV-6c作戰時序描述視圖等,根據作戰概念特點和體系推演仿真需求,形成架構邏輯模型,如圖2所示。針對武器系統殺傷鏈的構建要求,需要采用智能算法對邏輯決策模型進行構建,從而對戰場態勢情況進行自主決策、管控和尋優行動。

圖2 基于DoDAF2.0框架的架構邏輯建模視圖Fig.2 Architecture logic modelling view based on DoDAF2.0 framework
3.4 體系推演仿真
體系推演仿真主要包括4個步驟。
第一步,想定設計。先初始化想定文件,新建想定文件、添加想定的推演方、初始化想定描述信息等,接著根據作戰需求構建場景設計報告,包括構建作戰流程的時序、規模等。
第二步,場景建模。設置想定的戰場環境,并根據作戰場景設計報告,在聯合作戰推演系統中設計自定義仿真模型,包括作戰單元實體模型和作戰單元組件模型各類屬性、指標的設置,將仿真模型部署到對應的位置上。在二維態勢界面,將仿真推演涉及的各類單元實體、兵力設施等部署到地圖。
第三步,規則制定。作戰規則條令的設置用于控制部署在想定中每個實體的行為規范,包括設置推演方條令、設置任務、設置時間等,修改作戰條令配置是否會對武器運用以及作戰過程產生影響。
第四步,仿真推演與結果分析。在想定場景編輯完成后,開始仿真推演,進行人在回路的開環推演以及自動化仿真的閉環推演。在推演仿真結束后,將推演結果輸出,包括戰斗消耗統計、評分、關鍵事件分析等,并進行蒙特卡洛仿真分析統計和評估。
3.5 概念效能評估
在推演過程中,基于深度學習技術和智能算法,采用蒙特卡洛仿真實驗,并從多方面深層次挖掘各類仿真數據信息。通過推演復盤、數據分析、知識圖譜等技術,選取影響體系作戰效能的評估指標,建立體系作戰概念評估模型。
推演完成后,對作戰能力進行效能評估驗證,判斷與作戰需求是否匹配,若滿足作戰概念對應的能力需求,則結束推演;若作戰效能不能夠滿足作戰概念對應的能力需求,則對作戰需求進行二次驗證,調整作戰能力需求解決方案,直至作戰效能滿足作戰能力需求。
4 示例驗證
美軍“馬賽克戰”作戰概念將作戰單元以不同方式進行組合,可以按照作戰需求快速構建殺傷網,具備無中心節點、作戰分布廣、體系動態可重組、抗毀性強等特點。借鑒美軍“馬賽克戰”理念,提出面向無人機蜂群目標對抗的分布式聚合作戰概念,利用分散部署的探測、火力單元實施組網協同攔截,并進行作戰概念建模與推演驗證。
4.1 作戰需求分析
基于馬賽克戰的分布式聚合作戰任務清單、作戰能力需求清單、作戰要素清單如表1所示。
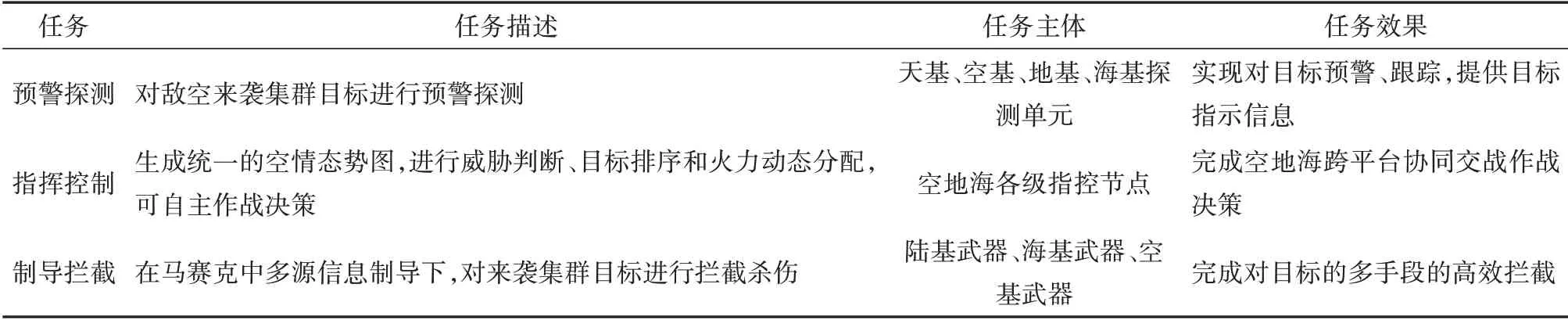
表1 作戰任務清單Tab.1 List of combat task
通過構建作戰活動與作戰能力關聯矩陣,形成作戰能力需求清單如圖3所示。
4.2 制勝機理分析
通過探測、火力單元解耦和分散部署,可基于開放式體系架構和模塊化、標準化接口快速聚合,根據作戰態勢快速構建作戰體系,實現探測網、火力網、指控網、殺傷網融合一體,縮短作戰鏈路,壓縮反應時間,快速作戰決策。同時,作戰體系可根據戰場態勢靈活調度作戰資源和快速投放部署,實現體系自適應重構和靈活拓展,提升作戰體系的網絡化殺傷鏈構建能力和抗毀頑存能力。
4.3 架構邏輯建模
基于馬賽克戰的分布式聚合作戰,其相應的作戰單位之間的OV-2視圖如圖4所示。
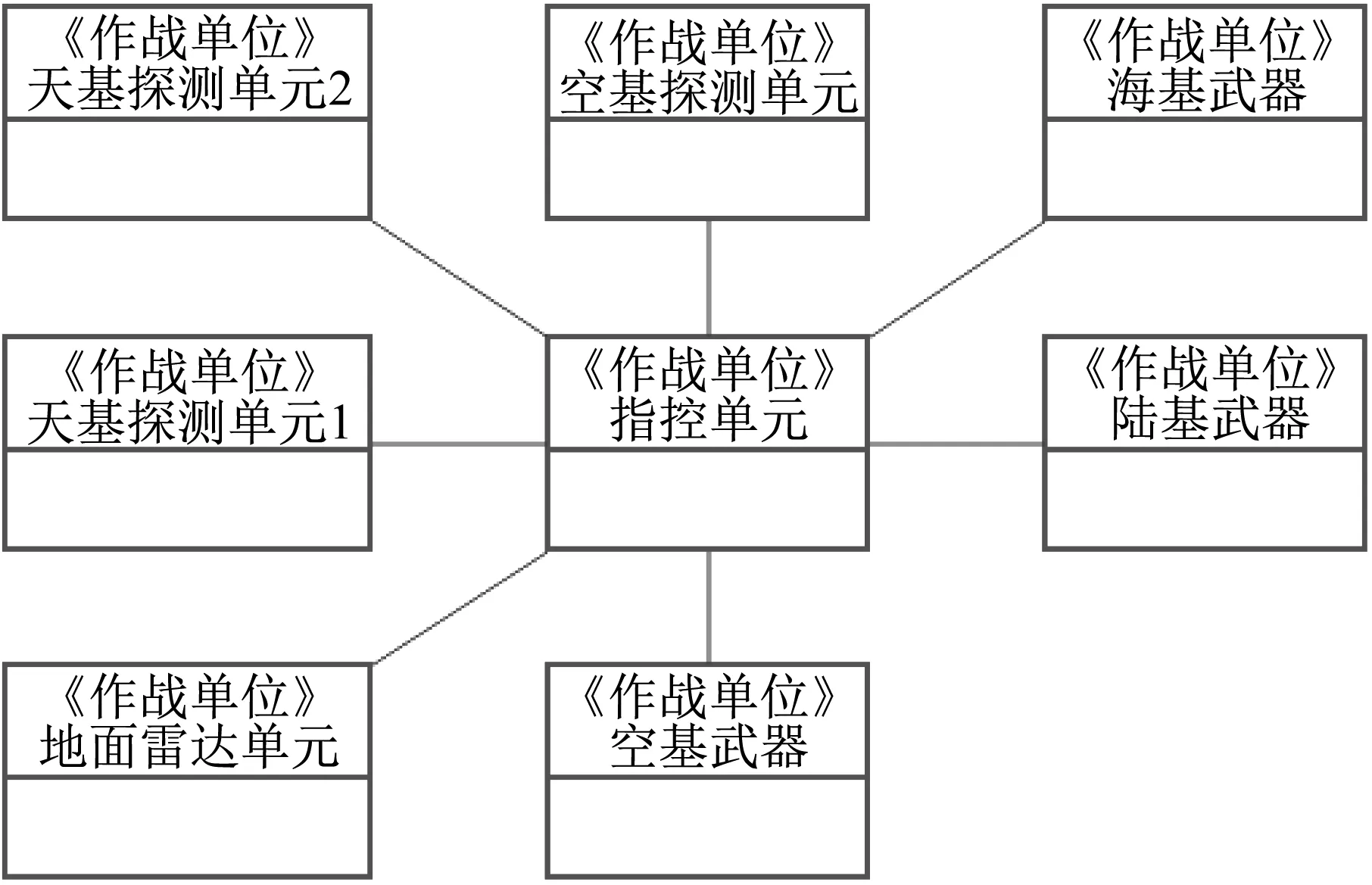
圖4 作戰概念OV-2視圖Fig.4 View of combat concept OV-2
涉及的作戰活動OV-5b視圖如圖5所示。
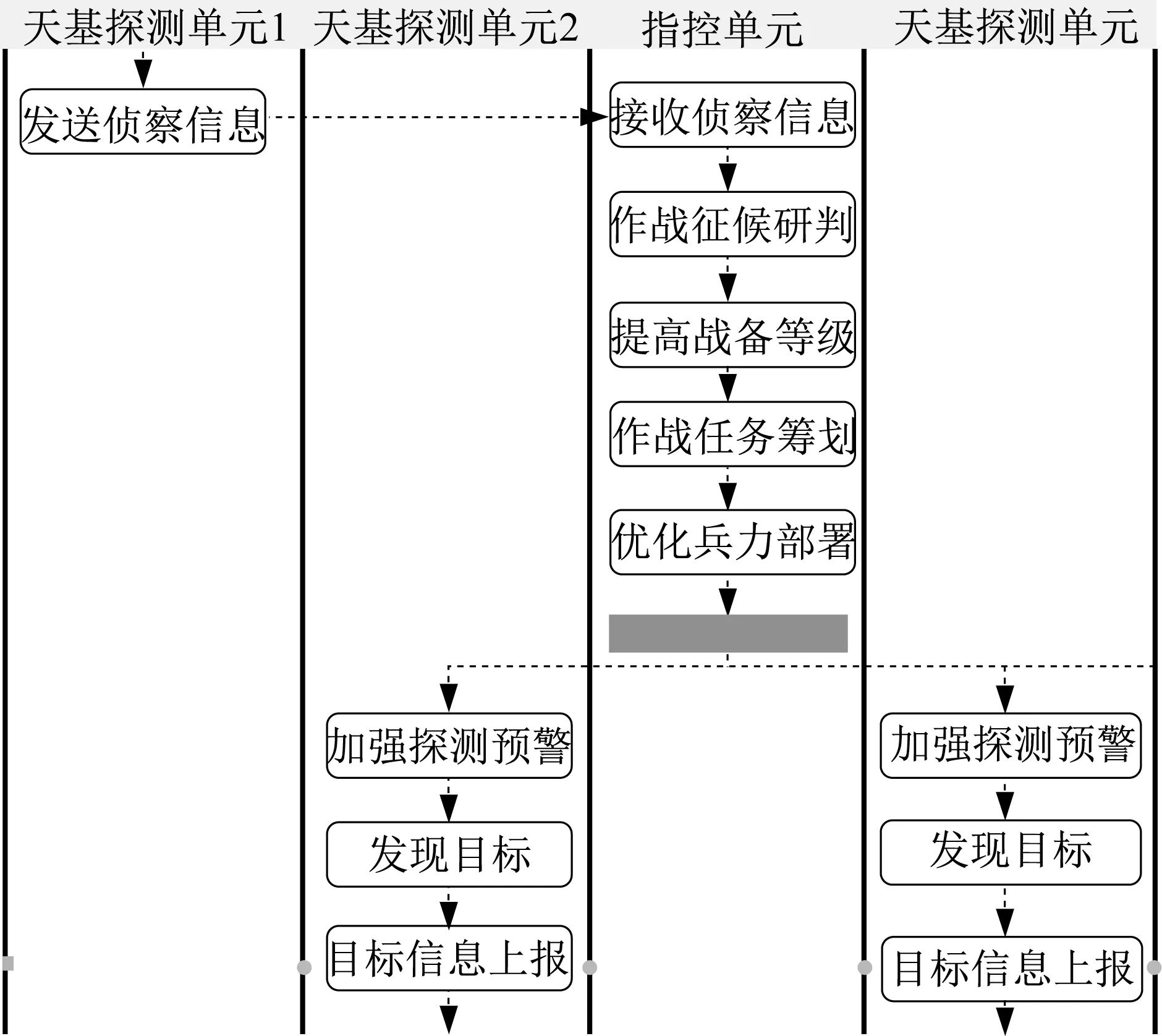
圖5 OV-5b作戰活動視圖(部分節選)Fig.5 View of OV-5b combat activity(excerpts)
涉及的作戰時序OV-6c視圖如圖6所示。
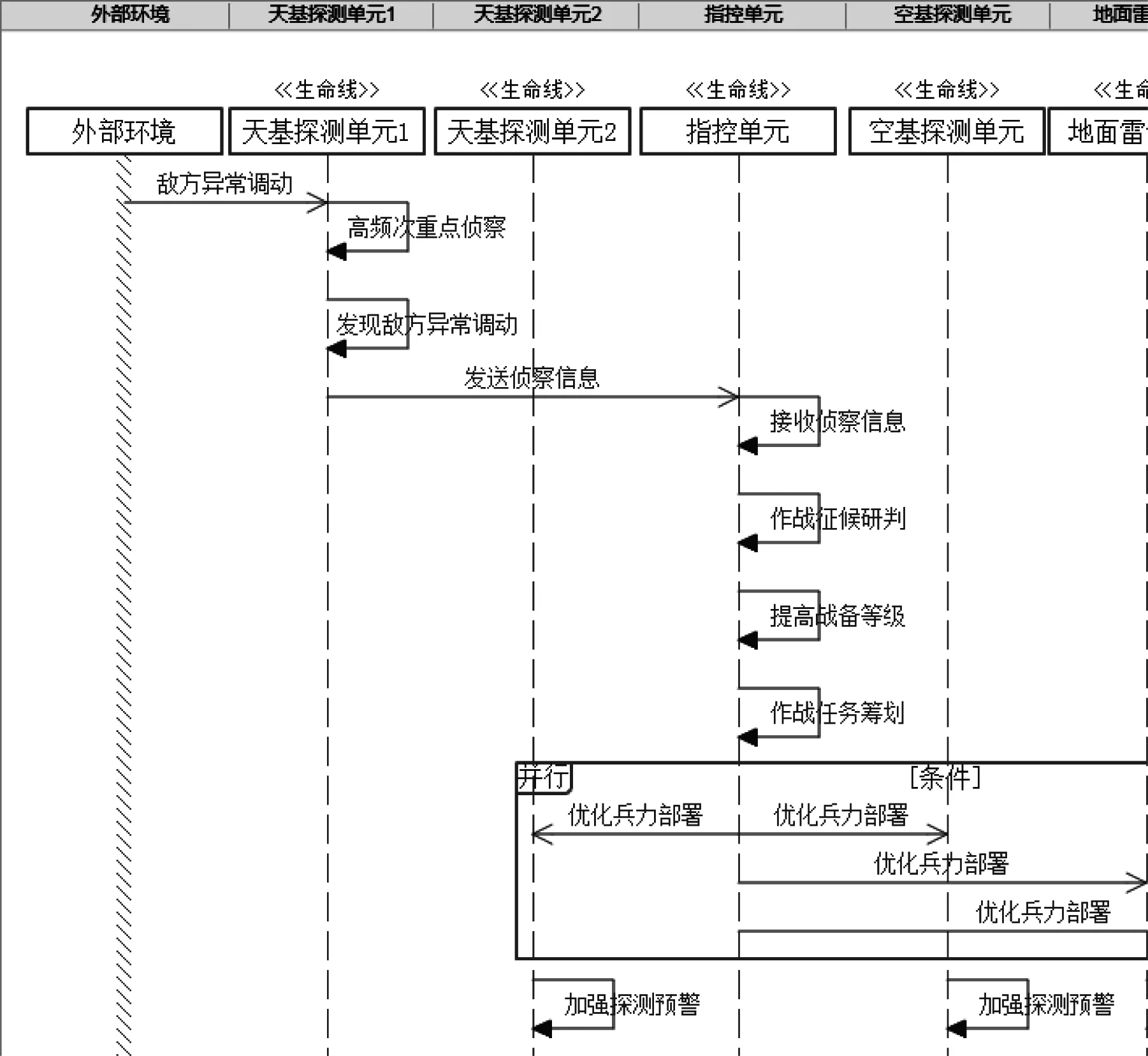
圖6 OV-6c作戰時序視圖(部分節選)Fig.6 View of OV-6c operations sequence(excerpts)
4.4 體系推演仿真
為驗證基于馬賽克戰的分布式聚合作戰概念,設置1個基礎組與1個對照組試驗進行對比,分別模擬常規攔截作戰模式和基于馬賽克戰的分布式聚合作戰模式,并采集相應的作戰推演數據。
2種模式的地基探測和火力單元對比如表2所示,其他包括藍方設置、2 種模式的紅方靶標、紅方防御火力數量保持一致。
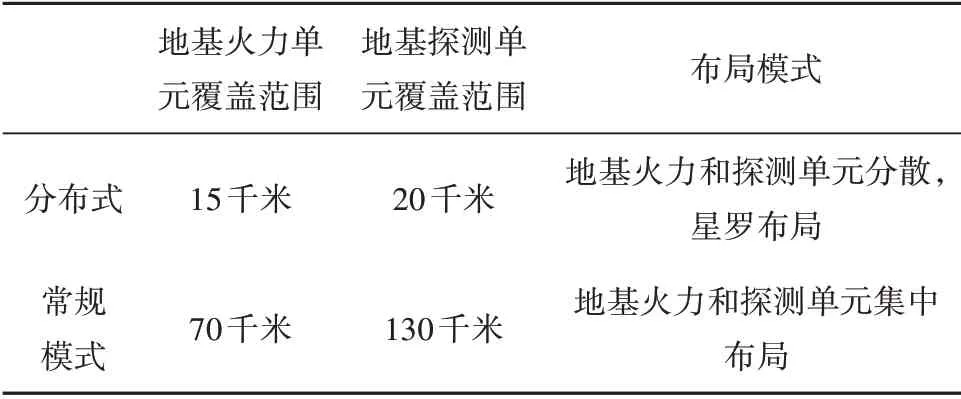
表2 2種作戰模式對比Tab.2 Comparison of two combat modes
4.4.1 想定設計
藍方實施抵近偵察、干擾、誘騙、攻擊,掩護主力裝備突襲打擊;紅方依托分布式防御體系,與戰區內陸基、空基等防御兵力實施聯合梯次攔截作戰。
4.4.2 場景建模
氣象環境:平均氣溫15 ℃,無雨,晴朗。
紅方兵力部署:常規模式包括陸基火力單元、陸基探測單元、空基探測單元等;分布式聚合作戰模式包括陸基探測單元、規模化部署分布式探測單元和火力單元構建分布式聚合防御體系。
藍方兵力部署:由3架運輸機組成,并各自投放50架、3批次“郊狼”無人機蜂群。
4.4.3 規則制定
本次推演仿真的主要目的在于驗證基于馬賽克戰的分布式聚合作戰概念對反蜂群作戰效能的提升,因此,在電磁管控條令中規定紅方在交戰過程中暫不開啟電子干擾設備。
4.4.4 對抗仿真
常規模式:紅方因缺乏有效的早期預警探測手段,雖然探測覆蓋范圍和火力覆蓋范圍較大,但由于“郊狼”無人機蜂群的目標特性和飛行高度低的原因,在接近陣地時紅方還沒有發現目標,如圖7所示。

圖7 紅方無法進行有效預警探測Fig.7 The scene in which red team is unable to make effective early warning detection
在藍方無人機群很接近紅方陣地時,紅方集中模式地基探測單元發現部分目標并展開攔截,而剩下大部分無人機群并未被發現,對紅方保衛目標造成較大損傷,如圖8所示。
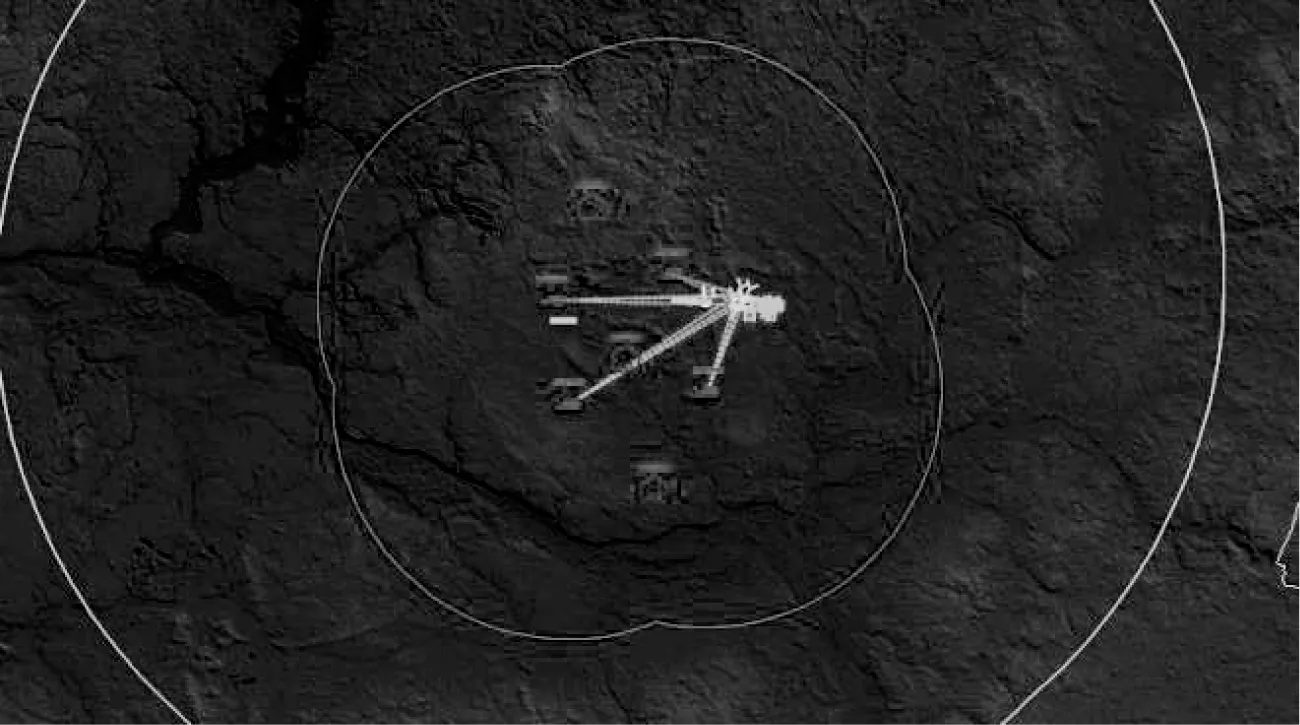
圖8 基礎組攔截作戰Fig.8 The scene in which the basic group involves interception
分布式聚合作戰模式:在空基探測單元早期預警的情況下,紅方空基發現藍方“郊狼”無人機蜂群的威脅態勢,并將預警信息傳送回后面的指控節點,因此,無人機群在進入地基探測單元范圍后能第一時間探測并識別無人機群,如圖9所示。
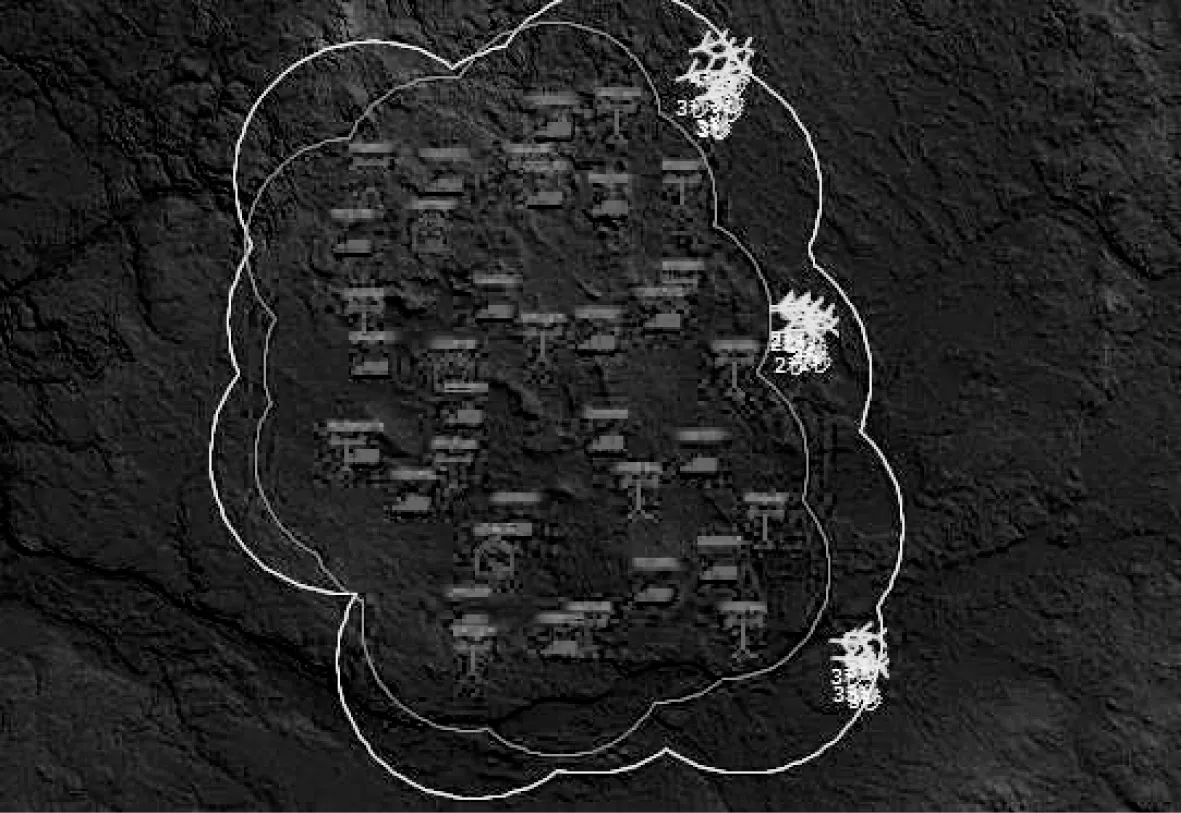
圖9 預警機發現敵方無人機群Fig.9 The scene in which the airborne warning and control system(AWACS)finds out enemy UAVs
指控中心指揮多類攔截火力單元,對“郊狼”無人機實施高火力密度攔截,如圖10所示。
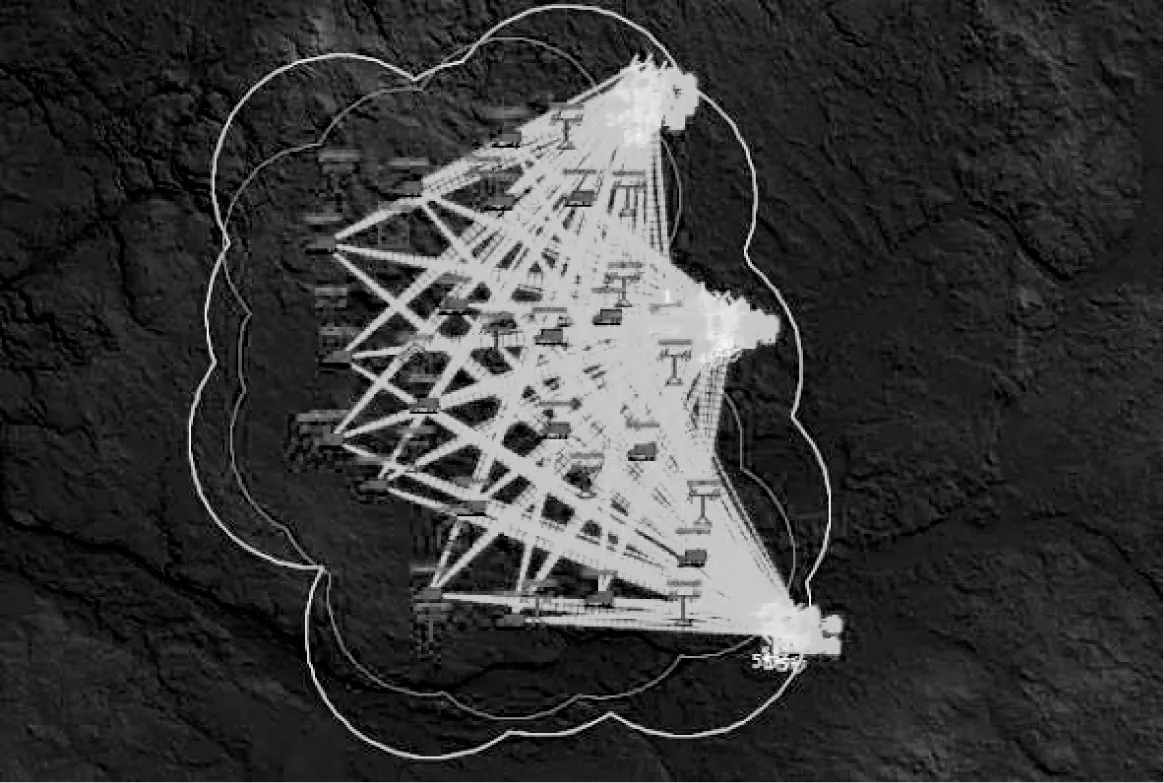
圖10 紅方多火力單元聚合攔截Fig.10 The scene in which Red team performs aggregation interception with multiple fire units
對抗結束后,完成對敵方無人機群大部分目標攔截。
4.5 概念效能評估
基于蒙特卡洛仿真方法,設置火力單元的攔截概率區間,通過統計得到紅方戰損和消耗的均值。
常規攔截模式下,由于缺乏有效的早期預警手段,敵方無人機群抵達紅方陣地時才發現目標。同時,由于缺乏有效的協同作戰手段,盡管發射大量導彈進行攔截,紅方對無人機群的打擊效果有限。
在基于馬賽克戰的分布式聚合作戰模式下,由分布式火力單元對“郊狼”等中小型目標實施高火力密度攔截,突防目標綜合利用分布式火力單元進行點面協同攔截。
毀傷與消耗對比情況如圖11所示。
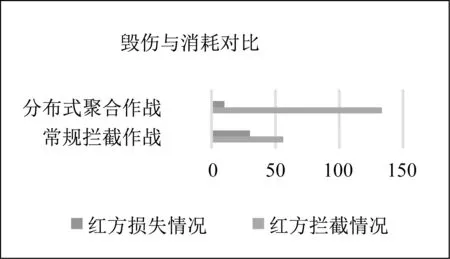
圖11 毀傷與消耗對比Fig.11 Comparison of damage and consumption
通過對比,紅方在基于馬賽克戰的分布式聚合作戰模式下,攔截藍方無人機的數量明顯上升,受到的損傷明顯下降,基本滿足對無人機群攔截作戰能力需求,說明基于馬賽克戰的分布式聚合作戰概念的應用對反超低空無人機蜂群目標防御具備較好的能力提升。
5 結 論
本文研究了美軍作戰概念建模與驗證方法發展現狀與趨勢,結合基于體系推演的作戰概念建模與驗證方法,按照作戰需求分析、制勝機理研究、架構邏輯建模、體系推演仿真、概念效能評估的開發流程,開展了基于馬賽克戰的分布式聚合防御作戰概念推演與驗證,初步驗證了基于馬賽克戰的分布式聚合作戰概念的有效性。
猜你喜歡
現代裝飾(2022年1期)2022-04-19 13:47:32
新世紀智能(數學備考)(2020年11期)2021-01-04 00:38:16
現代裝飾(2020年2期)2020-03-03 13:37:44
中國外匯(2019年17期)2019-11-16 09:31:14
中學生數理化·高一版(2018年9期)2018-10-09 06:46:48
中學生數理化·高一版(2017年9期)2017-12-19 12:15:14
湘江法律評論(2016年0期)2016-06-15 20:29:32
現代企業(2015年1期)2015-02-28 18:43:18
衡陽師范學院學報(2015年2期)2015-02-26 03:24:39
新高考·高一物理(2014年1期)2014-09-18 01:26:07