滑翔導彈軌跡跟蹤與能量管理模型設計與仿真
2023-01-17 13:02:02尹中杰施振興王韋鈺楊建東蔡克榮
系統仿真技術 2022年4期
關鍵詞:模型
尹中杰,王 磊,施振興,王韋鈺,楊建東,蔡克榮
(上海機電工程研究所,上海 201109)
隨著高超聲速技術的發展,以美國為代表的軍事大國正在大力發展臨近空間高超聲速飛行器,并在完成一系列的飛行試驗后提出了武器化的HSSW、AHW等項目,其中滑翔類項目因具有響應時間短、飛行速度快和機動性強等優勢成為后續發展中具有潛力的方案[1]。
在制導模型設計方面,由于滑翔導彈彈道在干擾情況下會偏離標稱,造成較大的位置、速度散布并產生額外的控制負擔,所以,軌跡跟蹤與能量管理建模方法引起了國內外學者的廣泛研究。
在軌跡跟蹤建模方面,李曉龍[2]將高度控制回路轉化為經典控制理論中的二階無靜差系統,提出一種具備高度跟蹤的制導模型。在此基礎上,劉凱[3]應用極點配置方法,給出保證閉環穩定性的PD制導模型參數設計準則,從而完成考慮氣動不確定性的軌跡糾偏,但是由于上述跟蹤模型缺少速度反饋回路,所以無法在擾動情況下保證速度的一致性,存在末速散布大的問題。
在能量管理建模方面,李瑜[4-5]通過規劃傾側角-速度剖面模型構建H-V 再入走廊,結合航向誤差走廊模型優化傾側反轉時機,在滿足終端高度、速度約束的同時,將航向角誤差控制在一定范圍內。在此基礎上,傅瑜[6-7]基于預測制導模型,通過在線積分得到末端狀態并以迭代的方式實現控高控速的目的。但是由于上述模型全程采用基于彈道偏角誤差門限的傾側翻轉邏輯進行橫側向通道軌跡控制,存在橫側向航跡不固定、位移偏差大的問題,并不適用于有著嚴格禁飛安全距離約束的滑翔導彈。
綜上所述,考慮到現有模型在跟蹤滑翔導彈航跡時,存在橫側向位移偏差大無法滿足禁飛安全距離約束和末速散布大的問題。這里首先基于任務預劃分手段以減小末端速度、位置散布為目的,將彈道預先劃分為控速段與跟蹤段。在跟蹤段利用線性二次型調節器以位移加權誤差最小為優化指標,完成軌跡跟蹤制導模型設計。在控速段在軌跡跟蹤制導律縱向通道附加空氣剎車攻角修正量,結合傾側角翻轉邏輯完成能量管理模型設計。最后開展拉偏條件下的對比仿真和蒙特卡洛打靶,通過對照分析位置、末速散布方式,驗證本文制導模型控制精度優于傳統方案,從而為滑翔導彈軌跡跟蹤方案提供潛在的技術途徑。
1 動力學建模與問題描述
1.1 動力學建模
在彈道坐標系中建立動力學模型,采用傾斜轉彎模式(Bank To Turn,BTT),整個再入過程均為無動力狀態,在球形大地假設下給出三維動力學模型,即
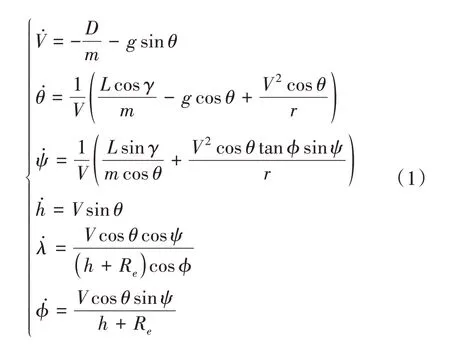
式(1)中,V是速度,θ是彈道傾角,ψ是彈道偏角,h是高度,λ是飛行器在地表投影點的經度,φ是飛行器在地表投影點的緯度,Re為地球半徑,g是重力加速度,m是飛行器的質量。γ是傾側角,D是阻力,L是升力,L和D的計算方法由式(2)給出,即
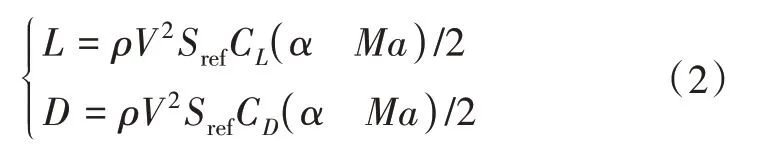
式(2)中,ρ表示大氣密度,可以視為高度的函數,Sref為參考面積,CL和CD分別表示升力和阻力系數為攻角α和馬赫數Ma的函數。
1.2 航跡跟蹤問題描述
軌跡跟蹤制導問題可以描述為,對于給定的滑翔段標稱軌跡,即
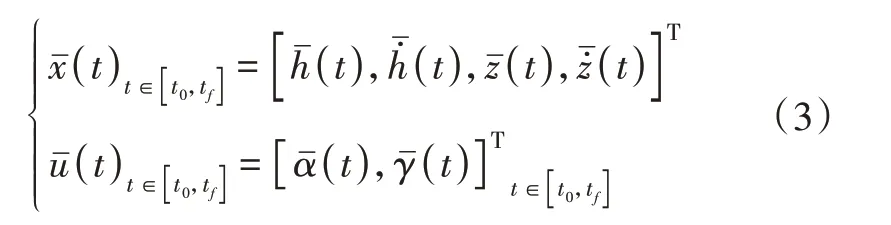
其中,(t)為標稱彈道狀態量,為射擊系z項標稱位移和速度,(t)為控制量。
利用線性二次型控制器設計原理,設計如下的狀態反饋控制器:

其中,(t)為控制量修正值,e(t)為狀態量標稱值與實際值之差。
狀態反饋控制器基于設定的綜合考慮制導控制偏差與偏差控制量積分的加權性能指標函數,即

計算滿足J最小的狀態反饋控制器系數,使得飛行器能夠用較小的加權偏差控制量確保實際飛行狀態與跟蹤標稱飛行軌跡中裝訂值的總的偏差加權值最小。即
則軌跡跟蹤制導問題轉化為如下的狀態反饋控制器參數優化設計問題:
1.3 能量管理問題描述
能量管理問題可以描述為基于事先規劃的滑翔段標稱軌跡,在軌跡跟蹤制導律縱向通道附加空氣剎車攻角修正量Δαc,在正拉偏(速度大于標稱)情況下以大攻角指令形式實現降速,即

其中,KL為設定的空氣剎車減速增量系數。
大攻角產生的額外升力通過設計傾側角指令γc,以傾側的方式確保升力縱向分量等于標稱攻角產生的升力,實現高度跟蹤。同時為避免傾側產生較大橫側向位移,設置傾側角反轉邏輯,即

其中,為滑翔段標稱軌跡彈道偏角。
綜上,能量管理模型在正拉偏情況下以小范圍犧牲橫側向精度的方式,通過空氣剎車進行減速,從而消除散布,實現較高的速度,高度制導精度。
2 任務預劃分手段
在得到離線規劃好的彈道后,需要基于任務預劃分手段預先劃分為控速段與跟蹤段,結合軌跡跟蹤與能量管理模型實現減小末端速度、位置散布的目的。具體流程如下:
(1)讀取標稱彈道數據,導彈任務初始化為stageenergy=1,其中stageenergy=1 為控速段狀態,0 為跟蹤段狀態。
(2)針對減小末速散布的需求,為提高空氣剎車減速效率,基于動壓Qv分配導彈任務,即
其中,Qvmin為控速段動壓門限。
(3)在任務狀態依舊為stageenergy=1 時,為避免在減速段因為標稱傾側角幅值過大,彈道偏角誤差頻繁大于誤差門限導致震蕩,基于再次分配任務,即
其中,為控速段傾側角門限。
(4)在任務狀態依舊為stageenergy=1時,為避免在繞飛時產生較大橫側向位移偏差,導致無法滿足禁飛安全距離約束,基于導彈與禁飛區航程ΔR再次分配任務,即

其中,ΔRmax為禁飛區航程約束門限。
在依次完成步驟(1)~(4)的判斷后,導彈基于當前狀態分別選擇相應模型進行制導指令解算,如圖1所示。
圖1 任務預劃分手段流程圖Fig.1 Flow chart of task pre-division means
3 軌跡跟蹤模型
將高度h、射擊系Z項位移影響作為關注狀態量,引入位移微分項對狀態方程擴維,沿飛行軌跡線性化可得

描述為狀態空間形式為

考慮飛行過程中與標稱軌跡的偏差,沿著e(t)=0,(t)=0進行線性化可以得到
針對線性化后的時變系統,這里需要設計一個狀態反饋控制器,即
通過線性二次型調節器配置反饋矩陣K,找到一組控制量u(t)。假設存在一個常量矩陣P使得

代入J后

令K=R-1BTP,則

在此基礎上,通過求解黎卡提方程得到矩陣P與控制參數K,軌跡跟蹤模型可以表示為

4 能量管理模型
在導彈處于控速階段,在軌跡跟蹤制導律縱向通道附加空氣剎車攻角修正量Δαc,以設定的大攻角指令αc實現降速,即
其中,αv為確保導彈在縱向通道穩定跟蹤的指令攻角,Δhv為設置的高度小量,ΔDrv為設置的航程小量。
大攻角產生的額外升力通過設計傾側角指令γc,以傾側的方式確保升力縱向分量等于標稱攻角產生的升力,實現高度跟蹤。在無法在線使用氣動庫的情況下,需要提前擬合升力系數,從而完成傾側角指令設計。
由式(2)可知,在已知馬赫數的情況下,升力系數與攻角相關,可基于最小二乘法將不同馬赫數下的升力系數擬合成以攻角為自變量的函數,即
其中,ΔMa為氣動庫中馬赫數各節點之間的步長。
在此基礎上,再次利用最小二乘法將各個節點的參數擬合為以馬赫數為自變量的函數,則線性回歸模型為
寫成矩陣形式為

采用最小二乘法對未知參數估計,即求解k的估計值

完成對升力系數的擬合,即
基于升力系數擬合函數,保證升力縱向分量等于標稱攻角所產生的升力傾側角指令,可以為以下形式:

當傾側角指令超出范圍(γc≥γcmax)后指令限幅,為避免限幅后升力縱向分量大于標稱攻角所產生的升力,從而無法進行高度跟蹤。這里需要減小空氣剎車攻角,則
在此基礎上,為避免傾側產生較大橫側向位移,需要設置傾側角反轉邏輯。當彈道偏角誤差大于誤差門限Δψfz時,改變傾側角符號,當彈道偏角誤差小于門限時,保持傾側角符號不變。
式(31)中,k- 1表示上一拍。
5 仿真分析
5.1 仿真輸入
假設導彈發射點經緯度為(0.0°,0.0°),計劃繞過經緯度為(-8.5°,1.4°)、(-6.5°,0.9°)的兩個40 km半徑禁飛區,并到達距離經緯度為(11.6°,1.8°)的目標點。這里導彈初始彈道傾角為85.0°,彈道偏角為0.0°,以末速最大為指標,優化得到圖2中的攻角、傾側角剖面,并積分得到圖3中滿足禁飛約束的離線規劃標稱彈道。
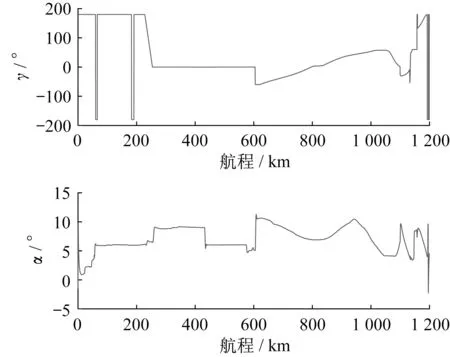
圖2 標稱攻角、傾側角-航程曲線Fig.2 Curves of nominal attack angle VS range and pitch angle VS range
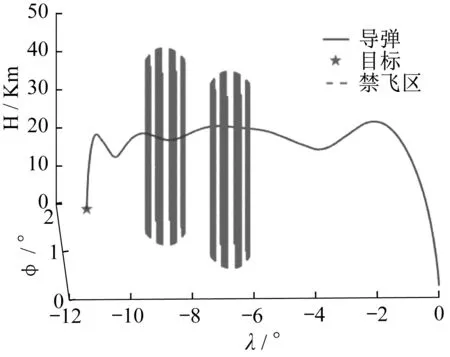
圖3 導彈軌跡圖Fig.3 Trajectory graph of missile
在此基礎上,結合圖2的攻角、傾側角剖面,這里兼顧禁飛區繞飛階段的橫側向制導精度需求與控速需求,基于任務預劃分手段以航程為自變量,將彈道滑翔段提前分為三段,分別是50~250 km 的軌跡跟蹤段、250~600 km的能量管理控速段和600~1100 km的軌跡跟蹤段,實現分段航跡糾偏與控速。
5.2 軌跡跟蹤與能量管理仿真分析
本小節考慮氣動、推力不確定性的軌跡跟蹤仿真分析,通過與傳統算法對比末速散布ΔVf與最大、終端位置偏差(ΔHmaxΔZmax)、(ΔHfΔZf)的方式,驗證建立的模型是否具有穩定跟蹤標稱彈道并減小末速散布的能力。
圖4為標稱狀態與拉偏狀態下進行能量管理的攻角、傾側角對照曲線。其中,軌跡跟蹤與能量管理模型在航程為50~250 km、600~1100 km 的跟蹤段,基于當前時刻的位置、速度偏差解算修正指令,通過在標稱值上附加攻角與傾側角的方式確保跟蹤誤差不發散;在250~600 km 的控速段,通過縱向通道附加空氣剎車攻角修正量并多次反轉傾側角的方式,在小范圍犧牲橫側向精度的情況下實現控高控速的目的。
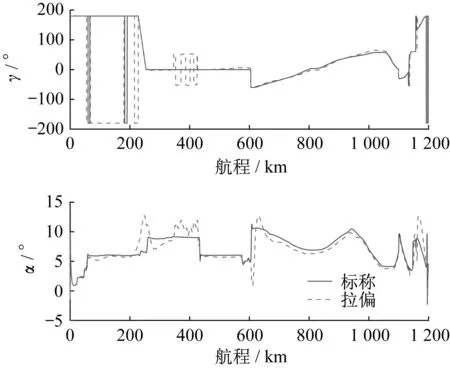
圖4 攻角、傾側角-航程曲線Fig.4 Curves of attack angle VS range and pitch angle VS range
圖5-7 為基于表1拉偏條件,分析能量正向拉偏彈道仿真的速度和位置誤差-時間曲線。圖5中分別為標稱狀態、采用軌跡跟蹤與能量管理模型和傳統P/D 跟蹤模型的速度-時間曲線。在標稱狀態末速Vf為668 m/s 的情況下,軌跡跟蹤與能量管理模型在保證跟蹤誤差不發散的同時,通過空氣剎車的方式有效降低了散布。最大末速偏差由P/D 制導的328 m/s 降為180 m/s,速度一致性得到大幅提升。
表1 拉偏信息表Tab.1 Pull deviation information table
圖5 速度-時間曲線Fig.5 Curve of speed VS time
圖6-7 中分別為使用軌跡跟蹤與能量管理模型和傳統P/D 跟蹤模型的高度、橫向位移誤差-時間曲線。結合表3可知,由于本文方法在控速段以小范圍犧牲橫側向精度的方式進行空氣剎車減速,所以在控速段產生了一定的橫側向位移,導致誤差最大值(1030 m)大于傳統P/D 控制(284 m)。但是如圖8所示,控速模型設置了最大彈道偏角偏差,當控速段實際彈道偏角誤差大于誤差門限時改變傾側角符號,從而通過翻轉避免產生較大橫側向位移并導致誤差發散。
圖6 高度誤差-時間曲線Fig.6 Curve of height error VS time
圖7 Z項位置誤差-時間曲線Fig.7 Curve of position error of Z axis VS time
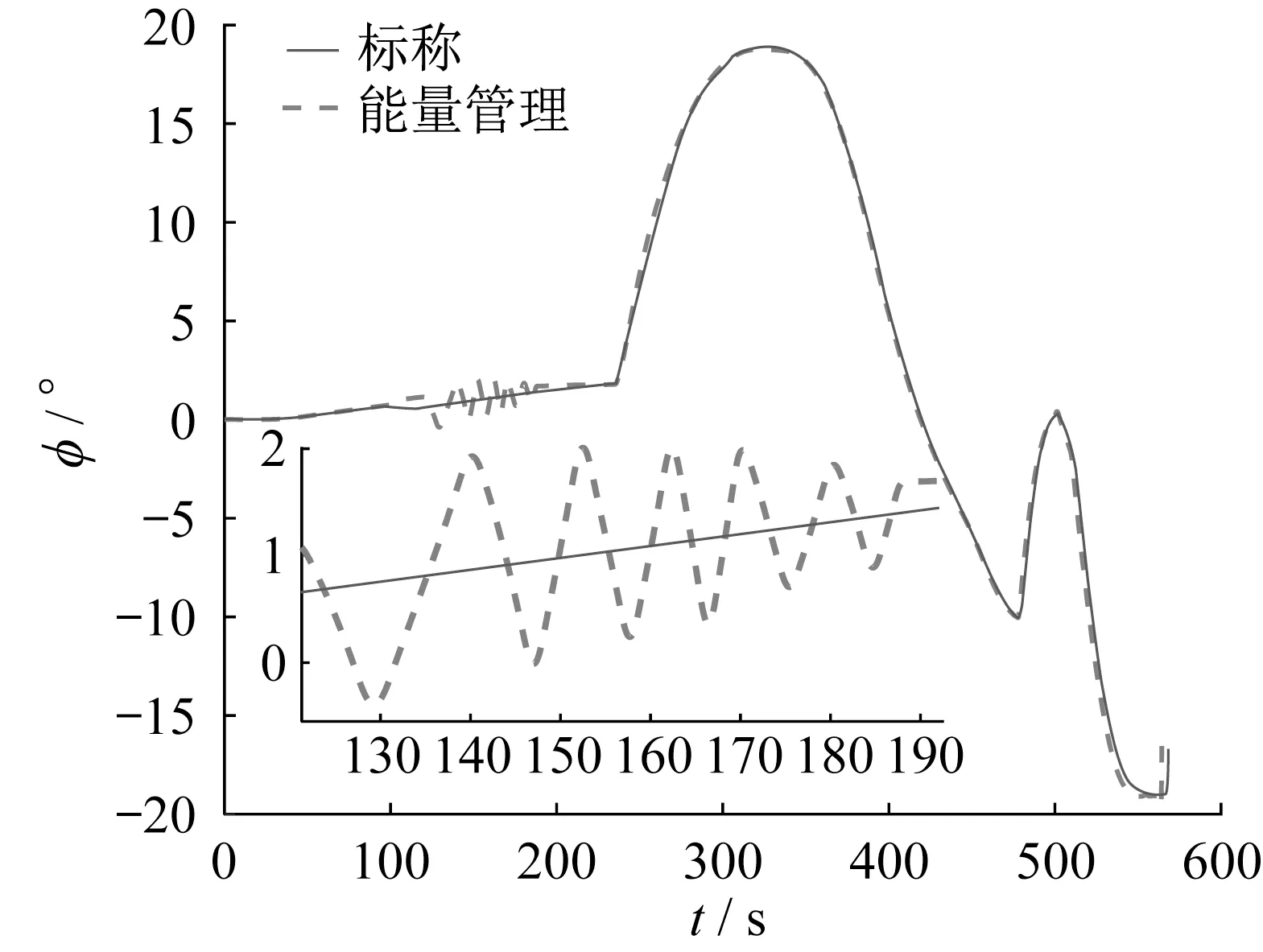
圖8 彈道偏角-時間曲線Fig.8 Curve of deflection angle VS time
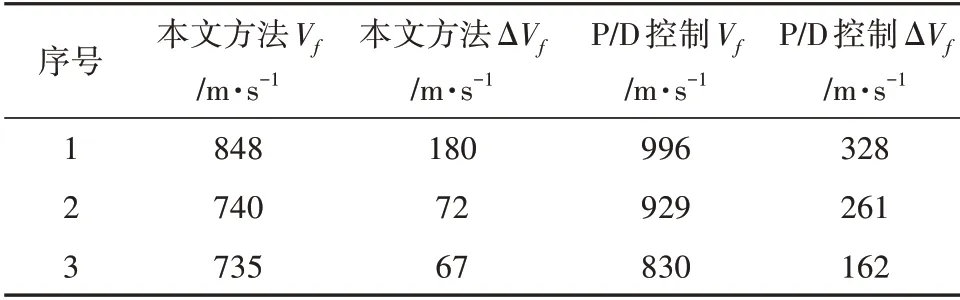
表2 拉偏數據對比表Tab.2 Comparisons of simulation results
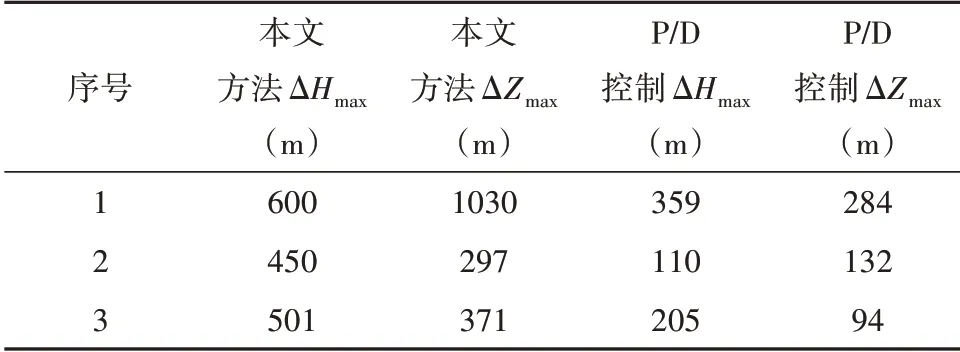
表3 位置偏差對比表(最大值)Tab.3 Comparison of the maximum position error
結合表4,通過與P/D 控制對比終端位置偏差可知,兩者控制誤差不明顯。因為本文方法在600~1100 km 的跟蹤段重新引入軌跡糾偏模型,所以能夠在控速段引入了較大的位置偏差后快速進行軌跡糾偏,使得跟蹤誤差收斂。
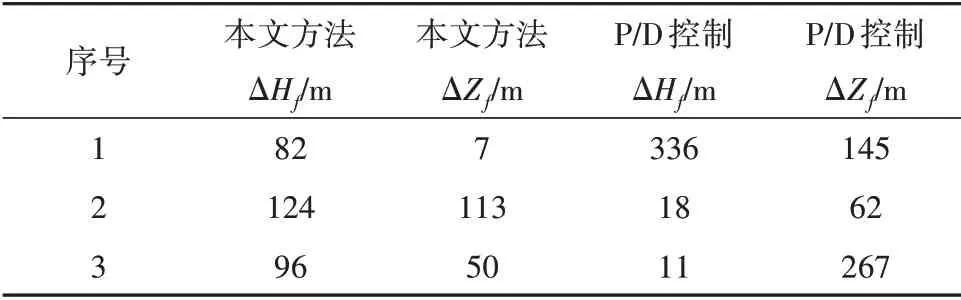
表4 位置偏差對比表(終端)Tab.4 Comparison of terminal position error
5.3 蒙特卡洛仿真分析
本小節開展氣動、推力偏差和大風組合干擾情況下的蒙特卡洛打靶仿真,以概率分析的方式對比軌跡跟蹤與能量管理模型與P/D 模型的末速散布及位置偏差,如圖9-11,驗證本文模型制導控制精度是否優于傳統方案。
圖9 ΔVf蒙特卡洛打靶Fig.9 Monte Carlo shooting of ΔVf
由圖9可知,在20次的蒙特卡洛打靶仿真中,軌跡跟蹤與能量管理模型ΔVf全部小于200 m/s,60%概率ΔVf小于100 m/s;而P/D 模型只有35%概率ΔVf在200 m/s以內。
由圖10-11 可知,2 種模型ΔHmax、ΔZmax全部在2 km 以內,軌跡跟蹤+能量管理模型有95%概率在1 km,而P/D 模型為100%;ΔHf、ΔZf在1 km 以內概率均為100%。
圖10 ΔZmax-ΔHmax蒙特卡洛打靶Fig.10 Monte Carlo shooting of ΔZmax VS ΔHmax
圖11 ΔZf-ΔHf蒙特卡洛打靶Fig.11 Monte Carlo shooting of ΔZf VS ΔHf
綜合6.2和6.3小節拉偏情況下的數學仿真可知,2 種模型的終端位置偏差相似,但軌跡跟蹤+能量管理模型具有更小的末速散布,從而避免產生額外的控制負擔。
6 結 論
本文針對干擾情況下彈道偏離標稱,造成較大的位置、速度散布并產生額外的控制負擔的問題。首先基于任務預劃分手段以減小末端速度、位置散布為目的,將彈道預先劃分為控速段與跟蹤段。在此基礎上,各段分別建立軌跡跟蹤模型和空氣剎車+傾側角反轉邏輯模型,實現考慮不確定條件的分段在線糾偏與控速。最后開展蒙特卡洛打靶對比仿真,通過對照分析最大、終端位置偏差和末速散布的方式,驗證了本文模型制導控制精度優于傳統方案,從而為滑翔導彈軌跡跟蹤方案提供潛在的技術途徑。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19