基于改進型恒虛警的毫米波雷達檢測算法*
2023-01-16 15:05:26毛芃暉
通信技術 2022年11期
胡 東,毛芃暉
(杭州電子科技大學,浙江 杭州 310018)
0 引言
毫米波雷達已被廣泛應用于智能駕駛[1-2]、交通管制[3]、動態檢測[4]、避障預警[5-7]等技術中。隨著應用范圍的不斷擴大,目標檢測的環境也越來越復雜,恒虛警檢測技術作為毫米波雷達目標檢測的關鍵技術,對于毫米波雷達的檢測性能起到決定性作用[8],是決定毫米波雷達能否準確及時地檢測出目標的重要因素,也是后續一切規劃和決策的基礎。
毫米波雷達恒虛警(Constant False Alarm Rate,CFAR)算法眾多,其中,均值類恒虛警中的單元平均恒虛警(Cell Averaging CFAR,CA-CFAR)在均勻環境下具有極佳的檢測性能,但是當有多個目標出現時,CA-CFAR 的檢測性能會迅速下降,出現目標遮蔽效應。為了克服多目標環境下檢測性能下降的問題,最小選擇恒虛警(Smallest of CFAR,SO-CFAR)與有序統計恒虛警(Order Statistics,OS-CFAR)檢測器相繼被提出,這兩種算法在一定程度上提高了多目標環境下的檢測性能,但也帶來了在其他環境下出現的檢測性能損失的問題。為此,Smith 等人[9]提出了變化指數恒虛警檢測器VICFAR。VI-CFAR 作為一種自適應恒虛警,能夠根據背景環境選擇合適的檢測器,在均勻環境和雜波邊緣環境下都有較好的表現,并且在多目標環境也有一定的抗干擾能力。但是當參考窗中出現大量的干擾目標時,VI-CFAR 的檢測性能會大幅度下降,毫米波雷達的漏警率會迅速提升,導致檢測精度下降。為了提升毫米波雷達在多目標環境下的檢測性能,在VI-CFAR 算法的基礎上提出了一種改進的VI-CFAR(KVI-CFAR)。該算法在多目標環境下采用KL 散度單元篩選恒虛警(Kullback-Leibler Trimmed Mean CFAR,KLTM)[10]作為處理策略,提升了毫米波雷達在多目標環境下的檢測概率,具有穩定的抗干擾能力。
1 算法原理
KVI-CFAR 檢測器由CA-CFAR、SO-CFAR、KLTM-CFAR 這3 種檢測器組成,可以根據背景環境自適應地選擇合適的檢測策略。
1.1 VI-CFAR 檢測器
VI-CFAR 通過利用參考單元作為樣本來對背景環境進行判斷,然后選取合適的CFAR 檢測器進行處理。要對背景環境做出判斷需要用到二階統計量VI 和參考窗均值之比(Mean Ratio,MR),其中VI 用于判斷前后參考窗是否均勻,MR 用來判斷前后參考窗均值是否相同[11]。VI-CFAR 檢測器原理如圖1 所示。圖中的D 為待檢測單元,前窗采樣值為xi(i=1,…,n),后窗采樣值為yj(j=1,…,n),α為門限系數,Z為總的背景功率水平估計值,T為檢測器的檢測門限。
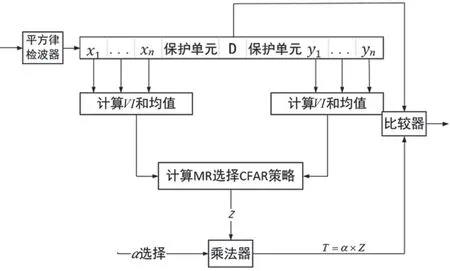
圖1 VI-CFAR 原理

將VI與檢測器統計比較門限值KVI進行比較來判別背景環境是否均勻,判別方法如下:

MR的定義為前后參考窗的均值之比,即:

將MR與MR的比較門限值KMR相比來判斷前后均值是否相同,判別方法如下:

通過式(2)和式(4)來判別前后參考窗是否均勻以及前后參考窗均值是否相同,并以此為依據判斷當前的背景環境,然后通過背景環境來選擇合適的CFAR 檢測器,具體的選擇策略如表1 所示。

表1 VI-CFAR 選擇策略
1.2 KLTM-CFAR 檢測器
KLTM-CFAR 的原理如圖2 所示,該檢測器首先通過計算有序排列樣本中不同數據段與第一段數據之間的KL 散度(Kullback-Leibler Divergence,KLD)(兩分布差異的度量準則)值,找出最大值所在位置;其次利用大津法[12]計算KLD 的分割門限值,將大于門限的值剔除,并將剔除數據的個數進行記錄,通過剔除數據個數和檢測概率來計算標稱因子得到檢測門限;最后與檢測門限進行比較判決[13]。
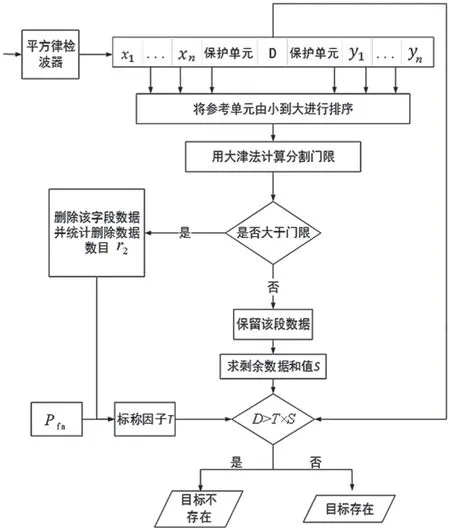
圖2 KLTM-CFAR 的原理
將參考單元的數據從小到大排序后,將有序數據分為n個整數段,每段有k個數據,再分別對每段數據求標準差,其計算式為:

式中:n為分段數;k為每段數據的個數;σj為第j段數據的標準差。
通過標準差計算每段數據與第一段數據的統計特性差異KLD,計算方法為:
利用大津法來計算分割門限,具體步驟為通過某一門限分割出兩個區域,以兩個區域的類間方差作為指標,計算類間方差的最大值即為分割閾值[14]。類間方差定義為:

式中:ω1=N1/N,N1為區域1 的數據單元個數,N為總的數據單元個數;ω2=N2/N,N2為區域2 的數據單元個數;μ1,μ2為區域1 和區域2 的KLD 均值。μ1,μ2的計算方法為:


最后求得閾值D為:

將統計的刪除數據個數記為r2,r1=0。根據虛警率Pfa與刪除數據個數r2來計算標稱因子T,標稱因子T的計算過程為:

將求得的T與數據單元和值S(式(14))相乘得到判決門限,通過判決門限來判別目標是否存在。判別方法如下:
1.3 KVI-CFAR 檢測器
KVI-CFAR 的選擇策略如表2 所示,由于CACFAR 與GO-CFAR 在均勻環境和雜波邊緣環境下表現較為出色,所以在KVI-CFAR 中仍然選擇這兩種檢測器作為選擇策略,在多目標環境下選擇了檢測性能更好的KLTM-CFAR。該檢測器的優勢在于,在多目標環境下不需要干擾目標的先驗信息,且在干擾目標數較多的情況下仍具有良好的檢測性能。

表2 KVI-CFAR 選擇策略
2 仿真實驗與結果分析
為了驗證KVI-CFAR 檢測性能的優勢,在毫米波雷達中采用蒙特卡羅方法[15],對各CFAR 檢測器進行仿真實驗,仿真次數為105次,在均勻環境和多目標環境下設定參考單元長度為16,Pfa=10-6,KVI=4.76,KMR=1.8,OS 取K=12 時有序統計量的值,OSVI 取K=6 時有序統計量的值。
2.1 均勻環境分析
圖3 為均勻環境下CA、VI、OS、OSVI、KVI的檢測性能對比。從圖中可以看出,OSVI、VI、KVI 具有比較接近的檢測性能,其中CA 在均勻環境下檢測性能最好。為了更直觀地分析各檢測器在均勻環境下的檢測性能,選取了當檢測概率為0.5時各檢測器相比于CA 的信噪比損失,如表3 所示。
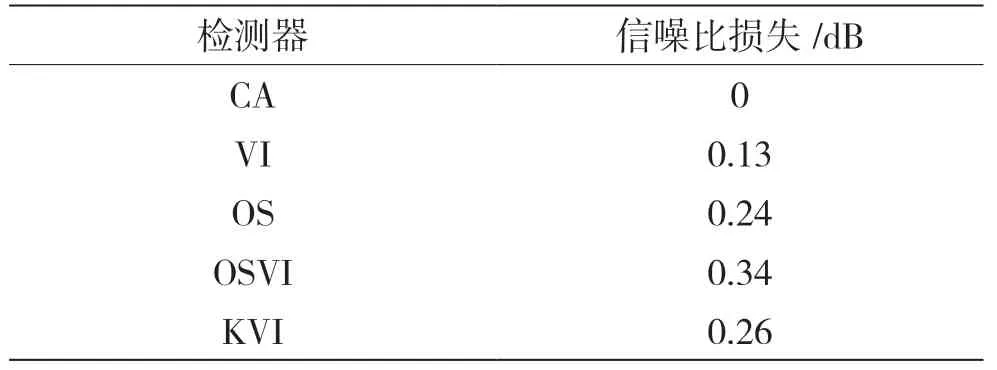
表3 檢測概率為0.5 時,各檢測器相比于CA 的信噪比損失

圖3 均勻環境下的檢測性能比較
2.2 雜波邊緣環境分析
設定虛警率Pfa=10-4,參考單元長度為32,OS-CFAR 序值K=24,OSVI-CFAR 序值K=12。各CFAR 檢測器的虛警控制能力如圖4 所示,從圖中可以看出,CA 在雜波邊緣環境下虛警控制能力較差,OSVI、VI 以及KVI 虛警控制能力基本相同。虛警控制能力由高到低依次為VI-CFAR、KVICFAR、OSVI-CFAR、OS-CFAR、CA-CFAR。

圖4 雜波邊緣環境下的虛警控制能力比較
2.3 多目標環境分析
考慮到干擾目標可能存在于單側窗或雙側窗,且單側前沿干擾與后沿干擾基本類似,所以本實驗單側干擾選定窗為前沿窗,將分別對單側干擾和雙側干擾兩種情況進行仿真分析。
圖5 所示為參考窗單側存在1 個干擾目標時檢測性能的比較。當存在干擾目標時,CA 的檢測性能迅速下降,信噪比為30 時CA 檢測概率為0.76。其他幾種檢測器仍保持著較好的檢測性能,其中,OS 的檢測性能優于OSVI,這是因為隨著信噪比的增大,OSVI 選擇單側窗的概率增大,參考窗的長度只有OS 的一半,因此造成了一定的信噪比損失[16]。KVI 由于可以濾除干擾目標,所以有著不錯的檢測性能。

圖5 單側1 個干擾目標檢測性能比較
圖6 和圖7 分別為單側存在3 個和5 個干擾目標時的檢測性能比較。隨著干擾目標數的增加,VI和CA 的檢測概率進一步下降。從圖6 可以看出,當單側出現3 個干擾目標時,OSVI 由于達到了最大干擾目標數的容限,檢測性能急劇下降。當信噪比為30 dB 時,OSVI 檢測概率為0.46,OS 檢測概率為0.505。當單側出現5 個干擾目標時,其他幾種檢測器基本沒有檢測能力了,此時KVI 仍然保持著較好的檢測能力。

圖6 單側3 個干擾目標時的檢測性能比較

圖7 單側5 個干擾目標時的檢測性能比較
圖8 為雙側存在1 個干擾目標時的檢測性能比較,其中,CA 與VI 的檢測性能都出現了較為明顯的下降,而OS、OSVI、KVI 保持著較好的檢測性能。VI 檢測性能下降的原因主要是在多目標環境下VI的選擇策略為SO,當兩側參考窗都出現干擾目標時,SO 的檢測性能會急劇下降。由于OS 與OSVI都屬于有序類恒虛警,對干擾目標的位置不敏感,所以未出現檢測性能迅速下降的情況。

圖8 雙側各存在1 個干擾目標時的檢測性能比較
圖9 為雙側存在2 個干擾目標時的性能比較,其中,OS 和OSVI 的檢測性能急劇下降。信噪比為30 時,OS 的檢測概率為0.5,OSVI 為0.53,VI與CA 的檢測概率也下降為0.259 和0.098。圖10為雙側存在4 個干擾目標時的檢測性能比較,除了KVI,其他檢測器已經檢測不到目標了,而此時KVI 的檢測概率在0.9 左右,表現出了較強的抗干擾 能力。

圖9 雙側各存在2 個干擾目標時的檢測性能比較

圖10 雙側各存在4 個干擾目標時的檢測性能比較
3 結語
本文通過對毫米波雷達常見恒虛警檢測算法的分析,提出了一種基于VI-CFAR 算法的改進型恒虛警檢測算法KVI-CFAR。本文簡要闡述了KVICFAR 算法的原理,并在不同背景環境下將KVI 算法與其他幾種檢測器進行了性能對比分析。結果表明,在多目標環境下,KVI-CFAR 相比于VI 和OS類算法具有一定的優勢,能夠有效提高毫米波雷達在多目標環境下的檢測概率,并能夠提升毫米波雷達的檢測精度,具有一定的實際應用價值。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
