基于光流勻速遠程操控樹障清理機器人的設計與研究
2023-01-11 11:00:28毛唯物宋延輝陸文鋒孫顯酉朱和平
數字通信世界 2022年12期
毛唯物,宋延輝,陸文鋒,孫顯酉,朱和平
(國網江蘇省電力有限公司建湖縣供電分公司,江蘇 建湖 224700)
0 引言
建湖縣域內輸電線路中存在大量分布于鄉(xiāng)村郊區(qū)的線路,每年線路通道內都會生長大量的白楊樹、竹柳樹等生長周期短、樹木體形大的樹種,輸電線路通道樹障問題嚴重,導致安全距離不足,影響線路安全穩(wěn)定運行,每年需要投入大量人力、財力對通道內樹障進行砍伐清理。目前只有人工進行砍伐和修理一種方式,但由于在高壓輸電線路下工作,此操作較為危險,且由于人力限制,工作效率無法得到保證。目前急需一種更省時省力、更安全的輸電線路通道樹木清理方式來代替?zhèn)鹘y(tǒng)的人力砍伐樹木方式[1]。
1 樹障爬行機的設計研究
機器人替代人工作業(yè),需要解決兩方面的問題:一是自主行走,二是執(zhí)行任務單元,兩者缺一不可。多足仿生技術的輸電線路樹障清理機器人,同樣需要解決這兩方面的問題。為此我們研究了3種類型的多足仿生爬樹方法。
(1)基于單搖臂爬樹方法研究:該爬樹方法的優(yōu)點是結構設計簡單,適合于便捷式工具產品;缺點是控制系統(tǒng)算法復雜,適應樹木種類性差,爬行過程中存在墜落風險。
(2)基于毛毛蟲爬樹方法研究:該爬樹方法的優(yōu)點是樹徑適應范圍大,帶載能力強;缺點是爬行速度慢,爬行過程中存在墜落風險。
(3)基于蛇形爬樹方法研究:該爬樹方法的優(yōu)點是采用節(jié)單元模塊設計,可以根據使用樹徑自由拼裝節(jié)數,“蛇頭”采用快裝方式,可以根據使用需求搭載不同種類傳感器,爬行過程中無墜落風險;缺點是帶載能力差,因而作為樹障清理執(zhí)行機器人無法搭載大功率切割設備。
綜合以上爬樹方法的優(yōu)缺點,需要設計一種結構簡單、帶載能力強、爬行穩(wěn)定可靠的爬行機器。為此,我們結合了毛毛蟲的爬樹方法與蛇形爬樹方法的優(yōu)缺點,設計出了一種“閉環(huán)螺旋攀爬樹障清理機器人”。該方法爬行原理與蛇形爬樹方法相似,采用了“阿基米德螺旋線運動學的機理”,但屬于閉環(huán)爬行,通過多個爬行輪與樹桿之間的彈力產生摩擦力,驅動負載能力較強,可以塔載大功率切割設備。設計的機器人體積不大于800 mm×800 mm×500 mm、模塊化設計且單模塊質量小于20 kg。設計的樹障清理機器人可適配稍經100 mm、根經350 mm的樹木種類,攀爬平臺具備自動或遙控上下操作,具有防墜落功能。
2 樹障清理的方法研究
研究一種便攜式微小型化的電動線鋸裝置模塊,安裝在爬樹機器人頂部,實現對樹障的水平斷尖、垂直修枝功能。該電動線鋸清理裝置主要包括上下機械手裝置、推桿伸縮裝置、抱樹爬行轉動裝置、水平推進切割裝置;其中,上下機械手裝置、推桿伸縮裝置與連接桿轉動裝置構成爬樹行走系統(tǒng),通過時序控制系統(tǒng)實現抱樹上下爬行、抱樹左右旋轉;電動鋼絲鋸安裝在電動萬向頭上,其線鋸切割方向以水平面為基準可從不同角度進行切割。通過光電傳感器技術獲取機器人足與樹干相對位置,并結合機器人攜帶攝像頭獲取的實時圖像比對完成機器人在非視條件下一鍵自主行走功能。此外,通過傳感器與圖像數據比對結果,輔助操控人員進行手動操作[2]。
3 光流傳感器的研究
樹障清理機器人視覺是通過光學裝置和非接觸式的傳感器自動接收并處理真實物體圖像信息,并通過分析獲得所需要信息或用于控制機器人自身運動的裝置。視覺控制以實現對機器人控制為目的進行圖像的自動獲取與分析,因此它是利用機器視覺的原理,對直接得到的圖像反饋信息快速進行圖像處理,在盡量短的時間內給出反饋信息,調整樹障清理機器人的位置和姿態(tài)。光流法作為計算機視覺高級功能的一種基本方法,已經成功運用在圖像識別、目標追蹤、圖像編碼、運動分析很多領域。
樹障清理機器人采用阿基米德螺旋線運動學的機理爬行。作業(yè)對象樹木上細下粗,爬行過程如不對樹桿切線方向速度進行均速控制,則會出現沿樹桿直徑方向不均勻的角速度。不均勻的角速度會行成不同的向心力,向心力改變會影響行走輪上壓力改變,從而影響爬行摩擦力。因此,需要對爬行速度進行測量,通常采用加速度計、陀螺儀、電磁羅盤等傳感器進行測量,根據傳感器的測量值的積分得到移動機器人的位置和姿態(tài)信息。其中,加速度計的測量值需要通過兩次積分才能得到機器人的位置信息,對溫度漂移敏感,并且一旦加速度的傾角超過0.5°,測量誤差將非常大,故只能應用在比較平緩的路面。相比與加速度計,陀螺儀提供的航向信息更加準確,但是它的測量值是角速度,必須通過一次積分才能得到航向信息,因此,靜態(tài)偏差漂移會帶來很大的誤差。電子羅盤可以直接獲得機器人的航向信息,但是在城市街道、室內等有較多電磁干擾的環(huán)境中有較大的干擾,不適合電子干擾比較強的區(qū)域。
4 電機勻速驅動的設計研究
電機驅動是自主行走的技術核心,該系統(tǒng)主要由以下四部分組成:動力電源系統(tǒng)、四組輪轂電機、光流傳感器、采集驅動通信單元。采集通信驅動單元在驅動牽引電機的同時,實時地對輪轂電機力矩、速度進行采集。
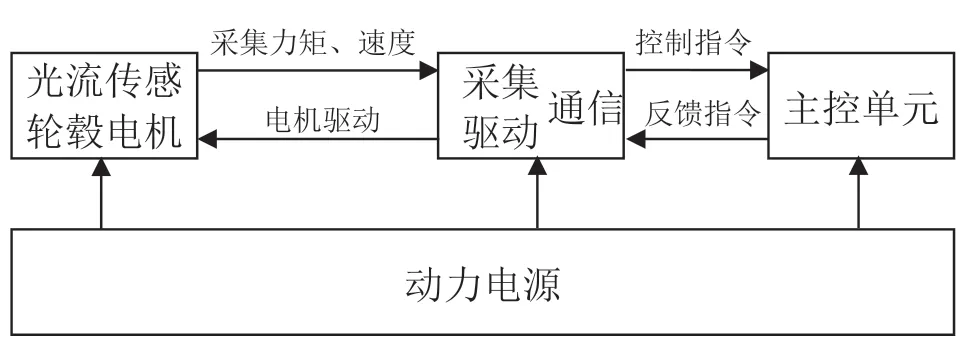
圖1 電機驅動系統(tǒng)功能框架圖
作為自主行走裝置,如果在樹徑發(fā)生變化時,會出現電機堵轉,電機在堵轉時會出現較大的電流。如果不采取電機驅動保護措施,可能使電路控制部分損壞,這樣整套設備就無法操作控制。因此需建立控制信號與反饋力的關系統(tǒng)模型。電機轉矩公式為


式中,n為電機轉速(r/min);U為電機端電壓(V);
為與電機結構有關的常數;R為電機電阻(Ω)。當相位角趨于最大時,擺動轉速為零,此時n=0,因此由式(1)、式(2)得出

由式(3)可知,在電機堵轉狀態(tài)下,在電驅電阻R及磁通量均不變的條件下,電機輸出轉矩與電機端電壓成正比。因而電機驅動采用調節(jié)電機端電壓的方式。
5 微功耗無線射頻傳輸技術的研究
為滿足樹障清理機器人操作工作人員身臨其境直觀的信息,使操作工作人員現場做出正確的決策和措施,實現高速的無線通信質量是樹障清理機器人大數據信息傳輸的關鍵技術所在。采用5G技術自建通信網絡的方案,2-FSK、GFSK調制方式,提高了數據抗突發(fā)干擾和隨機干擾能力,可有效滿足樹障機器人多通道視頻及數據傳輸的應用需求。
6 雙電源自動切換裝置的研究
樹障清理機器人因其便攜式的需要,選用能量密度、可靠性、安全性高的鋰電池作為動力電源。為保障樹障機器人的額定工作時間,不出現因電池耗盡無法操控。電源系統(tǒng)采用了雙電源系統(tǒng)設計。為符合本項目使用,電池性能指標及電池使用條件一般應考慮以下幾個方面。
⊙ 電池的工作電壓。
⊙ 電池的工作電流:即正常放電電流和峰值電流。
⊙ 電池工作時間:包括連續(xù)放電時間、使用期限或循環(huán)壽命。
⊙ 電池工作環(huán)境:包括電池工作環(huán)境及環(huán)境溫度。
⊙ 電池的最大允許體積:特別是隨著電子產品的小型化和輕量化,允許電池存在的空間將越來越有限。
7 結束語
采用多足仿生技術的輸電線路樹障清理機器人作為樹障清理工具,尤其作為便捷式工具需好用、耐用,由于制造工藝、設計安裝、缺陷類型、失效機制、運行操作的復雜性,尚有下列基礎理論和關鍵技術有待進一步突破。
(1)便捷性。該項目的成果是便捷式的機器人替代人工作業(yè),便捷性尤為重要,除選用密度更小強度更大的材料外,更需要在現有功能的基礎上將設備向集成化方向優(yōu)化,其一為動力電池與框架結構的集成,其二為輪轂電機與整機結構的集成。
(2)適應性。通常清理對象為生長接近高壓輸電線路導線的樹尖,此時高壓電磁場較強,如果機器人在樹桿中間過長,影響安全放電間距,存在二次風險,因此需要便捷小尺寸的機器人能替代人工爬行到樹頂部。從樹底部到樹斷尖的頂部位置,樹徑變化好幾倍,因而機器人必須對樹徑的變化適應性要強。
本文通過對樹障爬行機器人的設計研究、電機勻速驅動的設計研究、微功耗無線射頻傳輸技術的研究、雙電源自動切換裝置的研究,提出了一種基于光流勻速遠程操控的樹障清理機器人設計方法。系統(tǒng)以鋰電池為動力電源系統(tǒng),通過光流、力矩采集、驅動、通信單元驅動輪轂電機,最終設計的產品具備體積小、質量輕、便于安裝、操作簡單,具備5 km及以上自主行走、人工遠程遙控操控功能的樹障清理機器人可替代人工作業(yè),有效解決輸電線路走廊樹障的安全隱患問題,可大幅替代人工進行攀爬作業(yè),有效降低人身高空墜落或觸電、線路跳閘等風險,從而產生巨大的社會效益和經濟效益。■
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
兒童故事畫報(2019年5期)2019-05-26 14:26:14
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
