一種基于運(yùn)動(dòng)平臺(tái)的單站無(wú)源定位算法研究與應(yīng)用
2023-01-09 11:26:58馬若飛李辰梓
火控雷達(dá)技術(shù) 2022年4期
馬若飛 李辰梓 王 超
(西安電子工程研究所 西安 710100)
0 引言
隨著電子技術(shù)的不斷發(fā)展,在現(xiàn)代戰(zhàn)爭(zhēng)中,電子對(duì)抗的作用已經(jīng)越來(lái)越重要。無(wú)源偵察功能作為電子對(duì)抗重要的功能領(lǐng)域,在工作過(guò)程中不需要向探測(cè)目標(biāo)發(fā)射偵察信號(hào),從而實(shí)現(xiàn)了整個(gè)工作過(guò)程中的電子隱蔽效果,并且由于無(wú)源截獲的電磁波信號(hào)單向傳播特點(diǎn),使得無(wú)源偵察的探測(cè)距離相對(duì)較遠(yuǎn),可以較好的保護(hù)自身及己方目標(biāo),降低被敵方先期發(fā)現(xiàn)和跟蹤的概率[1-3]。單站無(wú)源定位技術(shù)作為無(wú)源偵察領(lǐng)域的重要應(yīng)用方向,在空間電磁頻譜獲取與電磁態(tài)勢(shì)生成中發(fā)揮著關(guān)鍵的作用。基于運(yùn)動(dòng)平臺(tái)的無(wú)源定位系統(tǒng),能夠自主地控制自身運(yùn)動(dòng)平臺(tái)的運(yùn)動(dòng)方式和運(yùn)動(dòng)航跡,使得其信號(hào)建模與定位估計(jì)算法相對(duì)簡(jiǎn)單清晰,并且可以在整個(gè)工作過(guò)程中,獲取到更優(yōu)的觀測(cè)條件,得到更好的觀測(cè)數(shù)據(jù)[4]。在威脅輻射源信號(hào)的截獲參數(shù)中,來(lái)波方向(DOA)的截獲計(jì)算容易實(shí)現(xiàn),并且該參數(shù)來(lái)源于威脅輻射源的位置與無(wú)源偵察系統(tǒng)的位置之間的空間關(guān)系,所以不容易在整個(gè)觀測(cè)過(guò)程中發(fā)生捷變,使得參數(shù)測(cè)量結(jié)果可靠性和可信度較高,因此基于來(lái)波方向測(cè)量的單站定位技術(shù)具有重要的意義[5-6]。基于以上闡述,本文采用基于運(yùn)動(dòng)平臺(tái)的威脅輻射源到達(dá)角度交叉技術(shù)進(jìn)行信號(hào)模型與算法原理的分析,并且進(jìn)行了模型仿真與外場(chǎng)試驗(yàn)驗(yàn)證工作。
1 信號(hào)模型與算法原理
基于運(yùn)動(dòng)平臺(tái)載荷的威脅輻射源角度交叉定位算法的信號(hào)模型如圖 1所示,圖中點(diǎn)T(Target)表示需要進(jìn)行無(wú)源定位的雷達(dá)輻射源在平面中的坐標(biāo)點(diǎn),點(diǎn)S(Start)是運(yùn)動(dòng)載荷進(jìn)行角度交叉定位時(shí)運(yùn)行航跡上的起始點(diǎn),點(diǎn)E(End)是運(yùn)動(dòng)載荷進(jìn)行角度交叉定位時(shí)需要實(shí)時(shí)計(jì)算并輸出定位值的定位點(diǎn),為了方便進(jìn)行三角關(guān)系的數(shù)學(xué)運(yùn)算,一般工程實(shí)踐中,運(yùn)行航跡選擇直線勻速運(yùn)動(dòng),即運(yùn)動(dòng)載荷從點(diǎn)S開(kāi)始沿著直線SE以速度V勻速運(yùn)動(dòng),在時(shí)刻t到達(dá)當(dāng)前定位點(diǎn)E,此時(shí)上述平面中的三個(gè)點(diǎn),形成三角關(guān)系圖。在該三角關(guān)系中,直線TE的長(zhǎng)度即為算法最終需要求解的威脅輻射源的距離信息。
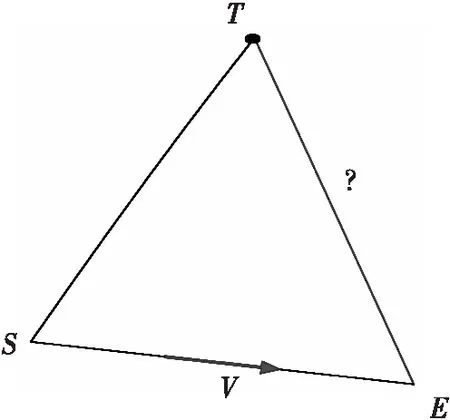
圖1 運(yùn)動(dòng)平臺(tái)角度交叉定位信號(hào)模型圖

(1)
公式(1)表示三角數(shù)學(xué)關(guān)系中的正弦定理,將其運(yùn)用在圖 1所示的信號(hào)模型中,正弦定理應(yīng)用為公式(2)和公式(3)所示的三角關(guān)系,要想求解TE的長(zhǎng)度DTE,就需要獲得運(yùn)行航跡中從起始點(diǎn)到定位點(diǎn)之間運(yùn)行的長(zhǎng)度DSE,起始點(diǎn)和定位點(diǎn)分別與威脅輻射源之間連線的夾角φT,以及起始點(diǎn)與運(yùn)行航跡之間的夾角φS。
(2)
(3)
在實(shí)際的應(yīng)用過(guò)程中,需要依據(jù)無(wú)源偵察設(shè)備采集威脅目標(biāo)的到達(dá)角度(DOA),慣導(dǎo)設(shè)備實(shí)時(shí)輸出當(dāng)前設(shè)備的經(jīng)緯度和航向角等參數(shù),計(jì)算距離估計(jì)值。根據(jù)上述參數(shù)形成的三角關(guān)系如圖2所示,其中DTE為需要求解的當(dāng)前距離值,DSE為航跡SE的距離長(zhǎng)度值,α為威脅輻射源在起始點(diǎn)S被測(cè)量的北向角φα,β為威脅輻射源在定點(diǎn)E被測(cè)量的的北向角φβ,θ為航跡SE的航向角度φθ,α′為α相對(duì)于北向坐標(biāo)軸的內(nèi)錯(cuò)角,β′為(360-β)相對(duì)于北向坐標(biāo)軸的內(nèi)錯(cuò)角。
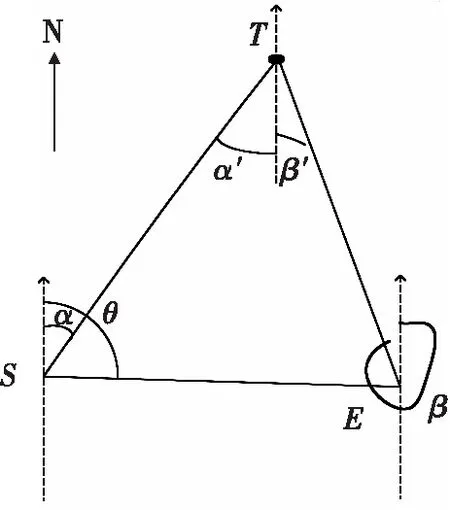
圖2 北向坐標(biāo)下可觀測(cè)參數(shù)三角關(guān)系圖示
下面根據(jù)以上一些測(cè)量或者計(jì)算參數(shù)值,獲得當(dāng)前求解距離值為
φT=α′+β′=(α)+(360-β)=α-β
(4)
φS=θ-α
(5)
(6)
2 仿真分析
按照上文中推理出來(lái)的威脅目標(biāo)當(dāng)前距離估計(jì)值(公式6),在Matlab中進(jìn)行仿真,仿真條件如下:
1)起始定位點(diǎn)時(shí),威脅目標(biāo)與運(yùn)動(dòng)載荷平臺(tái)相距固定的距離,并且起始定位點(diǎn)在運(yùn)動(dòng)載荷平臺(tái)行進(jìn)方向的起始角度差φT為從0°開(kāi)始。
2)工程設(shè)計(jì)中,角度誤差是無(wú)法消除的,然而角度誤差對(duì)定位算法會(huì)有影響,所以按照業(yè)界能夠?qū)崿F(xiàn)的干涉儀無(wú)源測(cè)角誤差量,暫定仿真的角度誤差值為±2°以內(nèi)的隨機(jī)值。
3)載荷平臺(tái)沿著直線勻速運(yùn)動(dòng),將角度差φT從0°運(yùn)行到180°,用于仿真在運(yùn)動(dòng)航跡上能夠測(cè)到的所有威脅輻射源可能存在的角度位置。
仿真結(jié)果如圖3和圖4所示,圖中的X軸 “偏差角度”是指起始定位點(diǎn)與目標(biāo)之間的連線,與當(dāng)前定位點(diǎn)與目標(biāo)之間的連線,所組成的角度值,即前面公式中的φT;圖中的Y軸的“誤差比”是指在相同的測(cè)角噪聲條件下,定位目標(biāo)的距離估計(jì)值與目標(biāo)真實(shí)的距離值之差,與目標(biāo)真實(shí)的距離值之間的比值,該值越小,表明定位目標(biāo)的估計(jì)值越準(zhǔn)確。
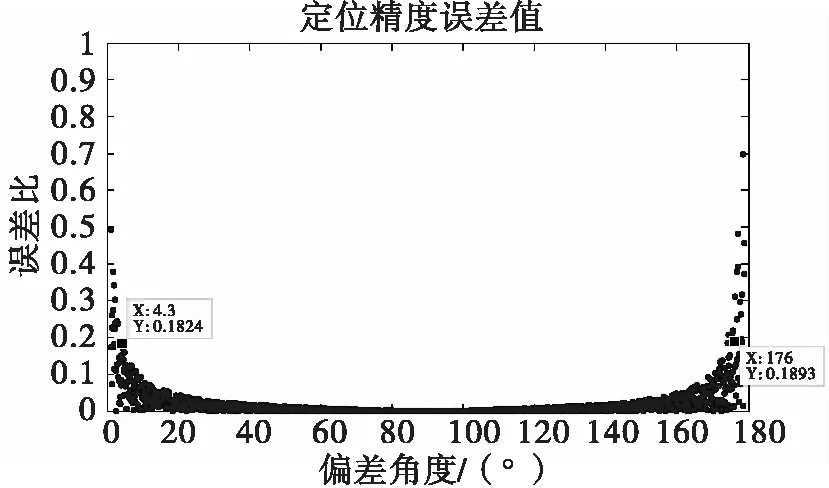
圖3 定位精度誤差統(tǒng)計(jì)圖(完整角度區(qū)間)
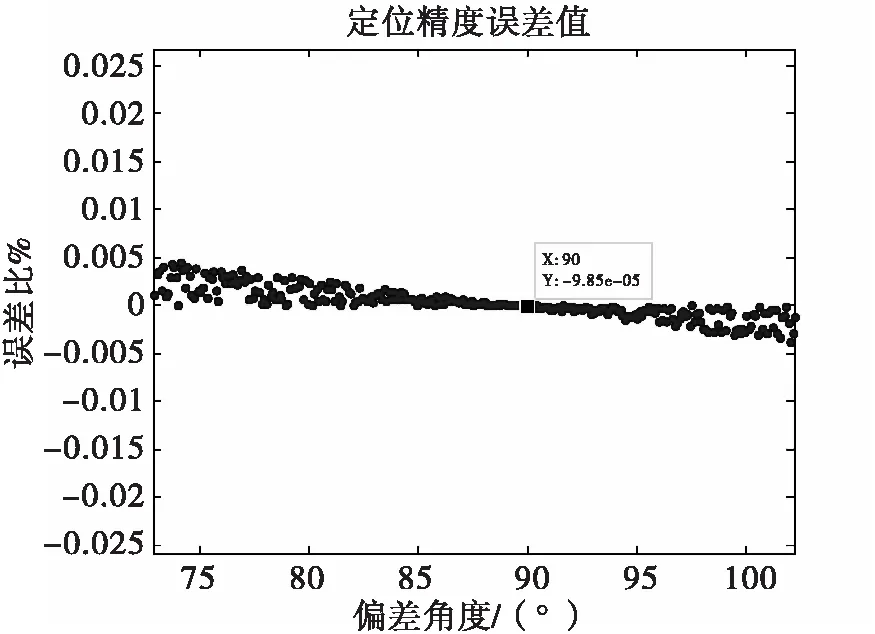
圖4 定位精度誤差統(tǒng)計(jì)圖(中心角度區(qū)間)
從圖3中可以分析得到,想要得到特定要求的定位精度(如要求定位精度小于N%),偏差角度φT需要滿足一定的要求,即大于固定偏差φdiff或者小于(180-φdiff)。實(shí)際應(yīng)用中,當(dāng)在運(yùn)行航跡上選擇了定位起始點(diǎn)之后,需要沿著預(yù)設(shè)的運(yùn)行航跡繼續(xù)運(yùn)行,相應(yīng)的定位精度會(huì)隨著偏差角度φT的增大而收斂,直到滿足需要的定位精度要求。
從圖 4中可以分析得到,定位誤差最小的角度偏差區(qū)間在φT等于90°附近,所以在實(shí)際應(yīng)用中,最理想的定位航跡點(diǎn)在φT等于90°的時(shí)候。
3 實(shí)驗(yàn)驗(yàn)證
通過(guò)將上文中分析的Matlab仿真算法,工程應(yīng)用到某無(wú)源偵察載荷中,利用該載荷截獲的威脅輻射源的到達(dá)角(DOA)和運(yùn)動(dòng)平臺(tái)在試驗(yàn)場(chǎng)地中的運(yùn)動(dòng)航跡,來(lái)測(cè)試驗(yàn)證該定位算法的工程可行性和指標(biāo)有效性。
實(shí)驗(yàn)場(chǎng)景如圖5所示,威脅輻射源布設(shè)在距離實(shí)驗(yàn)場(chǎng)景中的運(yùn)行公路外約2.5km遠(yuǎn)的固定點(diǎn),無(wú)源偵察載荷沿著運(yùn)行公路運(yùn)動(dòng)約1.5km,用來(lái)模擬實(shí)際的運(yùn)動(dòng)航跡。無(wú)源偵察載荷在運(yùn)動(dòng)過(guò)程中,實(shí)時(shí)計(jì)算威脅輻射源的到達(dá)角(DOA),并且綜合無(wú)源偵察載荷中慣導(dǎo)設(shè)備實(shí)時(shí)輸出的經(jīng)緯度信息和航向角信息,按照仿真算法要求,實(shí)時(shí)計(jì)算獲得當(dāng)前定位點(diǎn)與威脅輻射源所在固定點(diǎn)之間距離的估計(jì)值。在對(duì)比統(tǒng)計(jì)測(cè)距精度時(shí),首先采集威脅輻射源所在固定點(diǎn)的經(jīng)緯度信息,然后與無(wú)源偵察載荷運(yùn)動(dòng)過(guò)程中定位點(diǎn)的經(jīng)緯度信息進(jìn)行計(jì)算,獲得無(wú)源偵察載荷在運(yùn)動(dòng)過(guò)程中真實(shí)的距離值。將運(yùn)動(dòng)過(guò)程中實(shí)時(shí)估計(jì)的距離值與真實(shí)的距離值進(jìn)行比對(duì)統(tǒng)計(jì),可以分析整個(gè)運(yùn)動(dòng)過(guò)程中定位測(cè)距估計(jì)值的有效性。
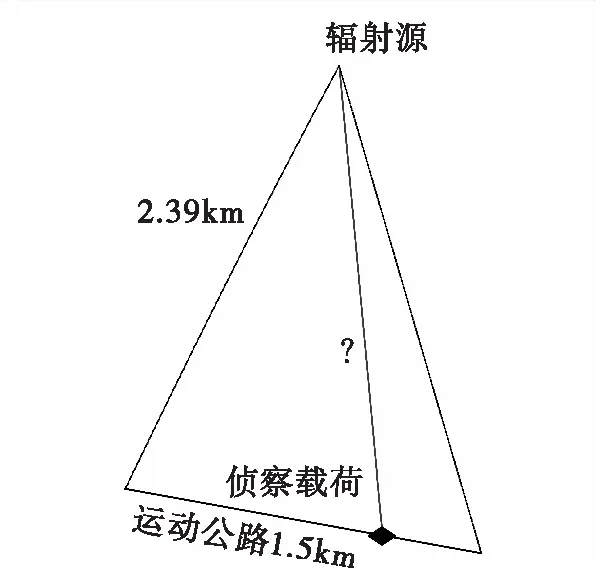
圖5 實(shí)驗(yàn)場(chǎng)景圖
因?yàn)閷?shí)驗(yàn)場(chǎng)地受限,運(yùn)行公路無(wú)法提供足夠長(zhǎng)的運(yùn)行距離,所以滿足不了仿真分析時(shí)最佳的角度偏差區(qū)間(φT等于90°附近),無(wú)法測(cè)試驗(yàn)證最優(yōu)的測(cè)試結(jié)果。但是在該實(shí)驗(yàn)場(chǎng)景下,已經(jīng)能夠獲得滿足系統(tǒng)測(cè)試要求的測(cè)距精度。
由于該無(wú)源偵察載荷是寬帶接收體制(2G~40G的工作頻段),所以試驗(yàn)中選擇S波段、X波段、Ka波段等三種典型頻段中的試驗(yàn)信號(hào),分別測(cè)試驗(yàn)證該算法的普適性。詳細(xì)的試驗(yàn)數(shù)據(jù)如圖6、圖7、圖8、圖9、圖10、圖11所示。由于該定位算法中,截獲的威脅輻射源的到達(dá)角(DOA)是個(gè)關(guān)鍵參數(shù),所以在統(tǒng)計(jì)分析實(shí)驗(yàn)數(shù)據(jù)時(shí),需要著重考慮該參數(shù)。三個(gè)波段的測(cè)角誤差圖和測(cè)距一次點(diǎn)誤差值圖中,都存在測(cè)角誤差圖中的有效數(shù)據(jù)時(shí)長(zhǎng)比測(cè)距一次點(diǎn)誤差值圖中的有效數(shù)據(jù)時(shí)長(zhǎng)要長(zhǎng)的情況,是因?yàn)闇y(cè)角數(shù)據(jù)是從無(wú)源偵察載荷開(kāi)始正常工作就實(shí)時(shí)截獲生成的有效數(shù)據(jù),而要獲得有效的定位數(shù)據(jù),需要形成一定的偏差角度φT,所以生成有效定位數(shù)據(jù)的起始時(shí)間比生成有效測(cè)角數(shù)據(jù)的起始時(shí)間要晚。
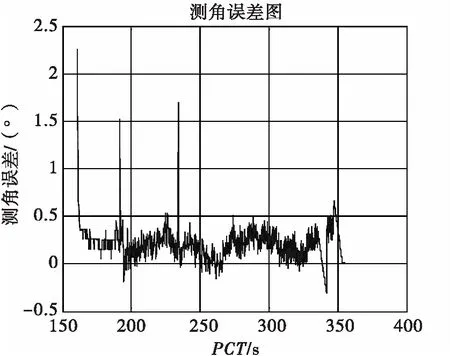
圖6 S波段信號(hào)的測(cè)角誤差值圖
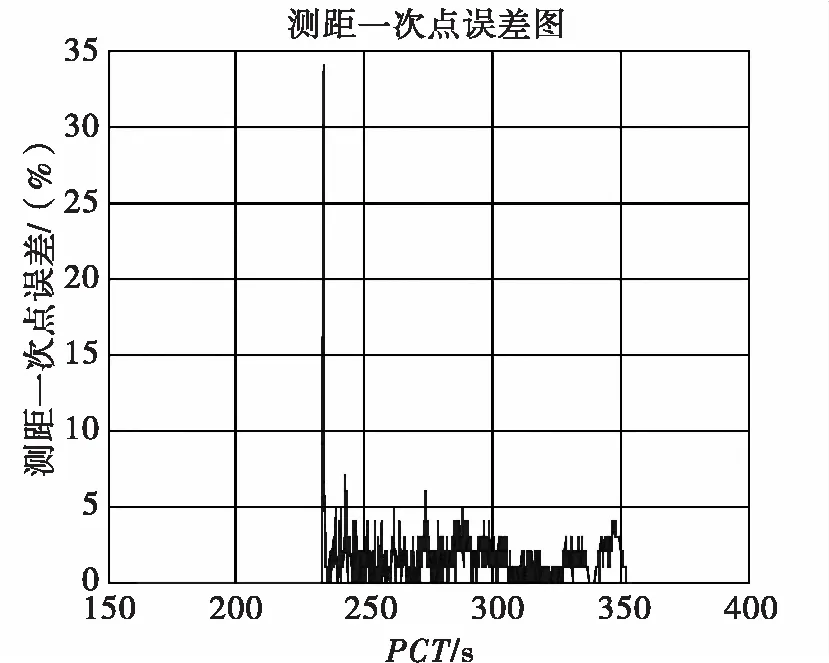
圖7 S波段信號(hào)的測(cè)距一次點(diǎn)誤差值圖
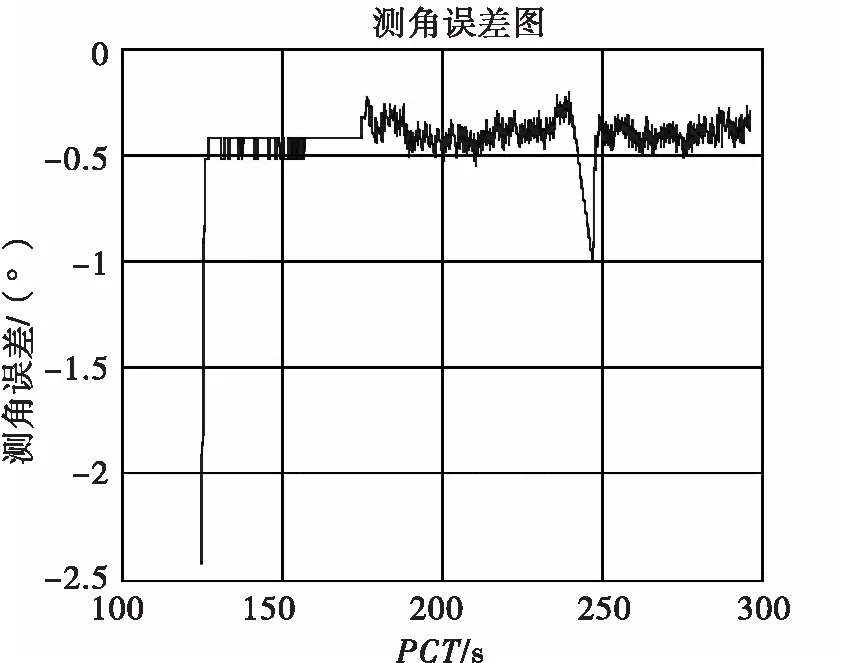
圖8 X波段信號(hào)的測(cè)角誤差值圖
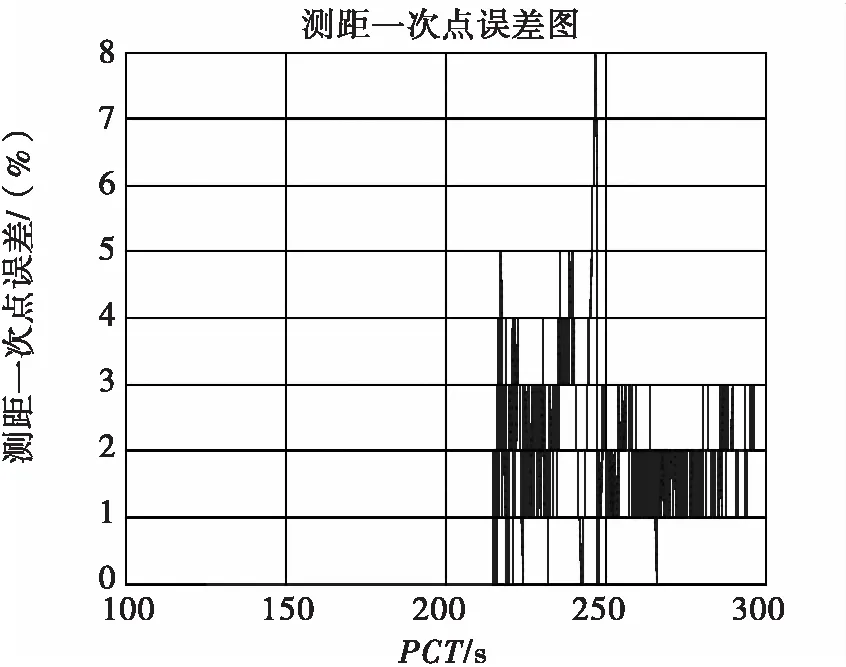
圖9 X波段信號(hào)的測(cè)距一次點(diǎn)誤差值圖
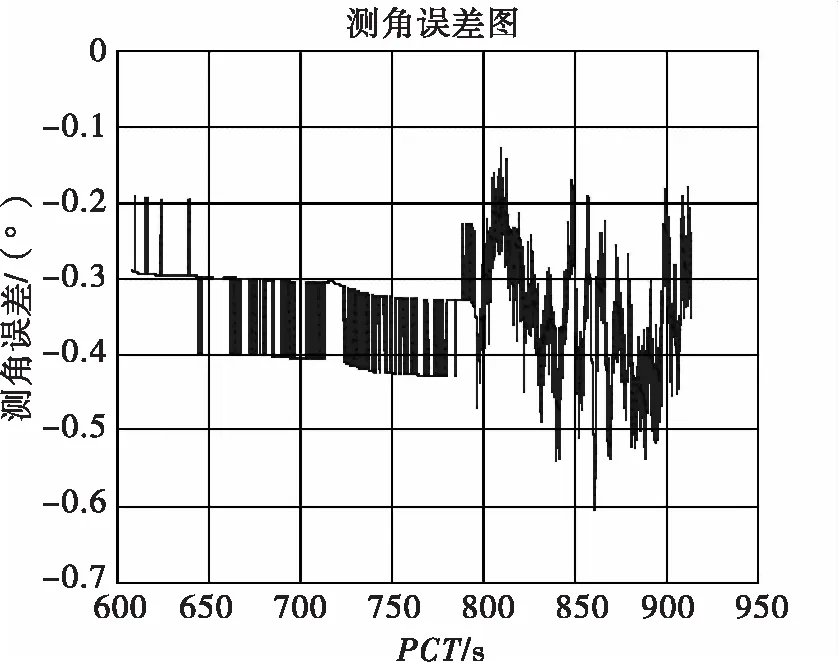
圖10 Ka波段信號(hào)的測(cè)角誤差值圖
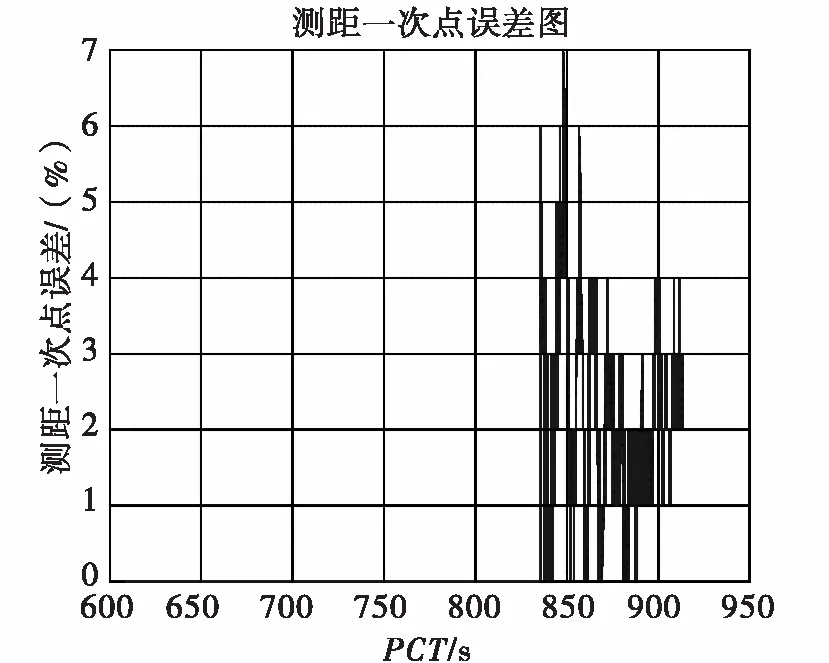
圖11 Ka波段信號(hào)的測(cè)距一次點(diǎn)誤差值圖
通過(guò)對(duì)以上試驗(yàn)數(shù)據(jù)進(jìn)行統(tǒng)計(jì)分析,形成如表1所示的試驗(yàn)數(shù)據(jù)統(tǒng)計(jì)表,通過(guò)該統(tǒng)計(jì)數(shù)據(jù)可知,當(dāng)運(yùn)動(dòng)平臺(tái)沿著航跡運(yùn)動(dòng)時(shí),只要測(cè)角精度滿足一定的指標(biāo)要求,通過(guò)該定位算法,估計(jì)的威脅輻射源的位置信息(距離)就會(huì)得到較好的精度指標(biāo)。
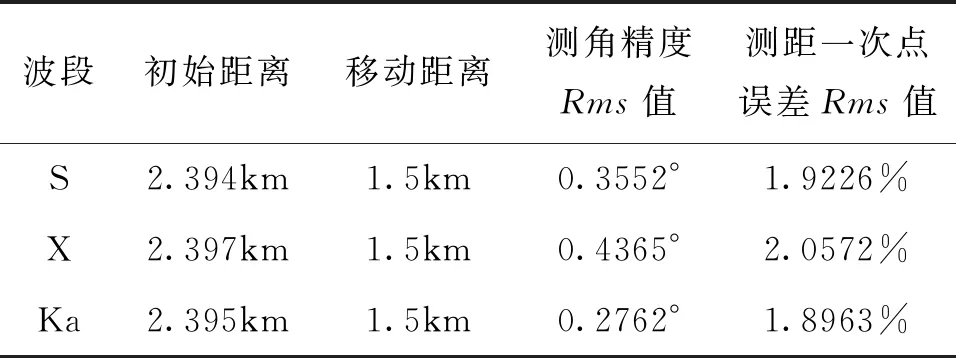
表1 試驗(yàn)數(shù)據(jù)統(tǒng)計(jì)表
4 結(jié)束語(yǔ)
本文通過(guò)對(duì)基于運(yùn)動(dòng)載荷的雷達(dá)輻射源角度交叉定位算法進(jìn)行信號(hào)建模,分析信號(hào)模型中相關(guān)參數(shù)之間的拓?fù)浣Y(jié)構(gòu)關(guān)系,運(yùn)用三角數(shù)學(xué)關(guān)系中的正弦定理,得到求解獲得當(dāng)前距離值DTE需要的關(guān)鍵參數(shù)及其對(duì)應(yīng)的數(shù)據(jù)來(lái)源,并分析推導(dǎo)了求解當(dāng)前距離值的估計(jì)算法。利用算法公式在Matlab中進(jìn)行了仿真,根據(jù)仿真結(jié)果形成了指導(dǎo)工程應(yīng)用的算法準(zhǔn)則和設(shè)計(jì)約束。最終將該估計(jì)算法工程應(yīng)用到某運(yùn)動(dòng)平臺(tái)的無(wú)源偵察載荷中,通過(guò)在布置好的外場(chǎng)試驗(yàn)場(chǎng)景中,選擇S波段、X波段、8mm段等三種典型頻段中的試驗(yàn)信號(hào),分別測(cè)試驗(yàn)證該算法的普適性。通過(guò)對(duì)試驗(yàn)數(shù)據(jù)進(jìn)行統(tǒng)計(jì)分析,當(dāng)運(yùn)動(dòng)平臺(tái)沿著航跡移動(dòng)預(yù)定的距離之后,只要測(cè)角精度滿足一定的指標(biāo)要求,通過(guò)該定位算法,估計(jì)的威脅輻射源的位置信息(距離)就會(huì)得到較好的精度指標(biāo)。