一組用于UWB室內(nèi)定位的新信道特征參數(shù)
2023-01-07 07:59:36楊宏超汪云甲徐生磊
導(dǎo)航定位學(xué)報(bào) 2022年6期
關(guān)鍵詞:實(shí)驗(yàn)
楊宏超,汪云甲,徐生磊,黃 璐
一組用于UWB室內(nèi)定位的新信道特征參數(shù)
楊宏超1,汪云甲1,徐生磊1,黃 璐2
(1. 中國礦業(yè)大學(xué)環(huán)境與測繪學(xué)院,江蘇 徐州 221116;2. 中國電子科技集團(tuán)公司第五十四研究所,石家莊 050081)
針對現(xiàn)有超寬帶(UWB)信道識別參數(shù)精度低及魯棒性差的問題,提出一組基于信道脈沖響應(yīng)的新信道特征參數(shù),并結(jié)合支持向量機(jī)構(gòu)建非視距信道識別算法,然后根據(jù)波形特征分類測距誤差并制定優(yōu)化策略。在優(yōu)化定位精度的基礎(chǔ)上,本文引入模糊度為原始定位結(jié)果提供可信度評估。實(shí)驗(yàn)結(jié)果表明:引入新參數(shù)后信道識別算法的平均精度為93.94%;視距、非視距數(shù)據(jù)的準(zhǔn)確率分別為90.13%、96.96%;修正后視距測距精度平均提高22.84%;非視距測距誤差平均減低1 m以上;動態(tài)定位結(jié)果中厘米級精度占比提升41.5%。
超寬帶;信道脈沖響應(yīng);非視距識別;測距誤差校正
0 引言
隨著室內(nèi)位置[1]服務(wù),例如倉儲管理、應(yīng)急救援、疫情流調(diào)等需求的增加,室內(nèi)高精度位置信息的獲取技術(shù)受到廣泛的關(guān)注。超寬帶[2](ultra wide band, UWB)具有脈沖窄、帶寬高、抗多徑干擾等優(yōu)點(diǎn),允許精確的飛行時(shí)間測量和高分辨率的信道脈沖響應(yīng)(channel impulse response, CIR)估計(jì),適配復(fù)雜的室內(nèi)環(huán)境。非視距現(xiàn)象(non line of sight, NLOS)是影響UWB測距精度的主要原因,定義為硬件之間的通視路徑受阻,脈沖信號需傳播額外距離才能抵達(dá)接收端。測距結(jié)果存在正偏誤差,導(dǎo)致定位結(jié)果無法被解算或存在較大偏移。室內(nèi)復(fù)雜易變的拓?fù)洵h(huán)境大幅度提升了NLOS發(fā)生頻率。因此,在定位前識別信道環(huán)境以保留高精度的視距(line of sight, LOS)測距結(jié)果,修正或剔除帶有正偏差的NLOS測距結(jié)果是提高定位精度的核心。


針對上述問題,本文根據(jù)UWB信號到達(dá)后引起的CIR波形變化將通信過程分為3部分,并從環(huán)境噪聲及首徑到達(dá)階段提取4個新特征。本文利用模糊度挖掘潛在信息,并根據(jù)不同階段的特性分類非視距誤差,并擴(kuò)展到部分視距數(shù)據(jù)。
1 信道識別信息提取
UWB測距精度取決于硬件是否能準(zhǔn)確獲取信號到達(dá)時(shí)間,其原理是識別首個超過邊沿檢測算法[17](leading edge detection, LDE)閾值的CIR的時(shí)間節(jié)點(diǎn)。CIR的獲取是通過評估累積傳入樣本與預(yù)期前序序列的相關(guān)性,其計(jì)算公式為



圖1 典型LOS下UWB信號的CIR波形

圖2 典型NLOS下UWB信號的CIR波形
1.1 新特征提取


圖3 新特征參數(shù)在視距及非視距環(huán)境下的數(shù)值分布








1.2 模糊度




圖4 歸一化新特征參數(shù)的隸屬函數(shù)
2 最小二乘支持向量機(jī)


優(yōu)化問題的計(jì)算公式為

式(14)可近一步簡化為

簡化后的拉格朗日對偶變?yōu)榫€性規(guī)劃,LS-SVM分類器可以寫成

簡化后的拉格朗日對偶同樣為線性規(guī)劃,LS-SVM回歸器可以寫成

3 測距誤差分類修正
現(xiàn)有的誤差修正算法只針對判定為非視距(identified NLOS,I-NLOS)的測距結(jié)果并存在下列問題:首先,算法不修正判定為視距(identified LOS,I-LOS)的測距值會忽略混入的誤判數(shù)據(jù)并導(dǎo)致性能高度依賴于信道識別精度;其次,算法對測距誤差采用相同模型會導(dǎo)致部分點(diǎn)的修正效果相反。本文根據(jù)誤差的波形特征將I-NLOS誤差分為3類并優(yōu)化對應(yīng)的特征向量。此外,該分類策略也應(yīng)用于I-LOS數(shù)據(jù)來額外修正部分誤差較大的LOS數(shù)據(jù)。


表1 測距誤差修正的分類以及對應(yīng)優(yōu)化向量

4 實(shí)驗(yàn)與結(jié)果分析
為了驗(yàn)證新參數(shù)的信道識別及誤差校正效果,本文選用搭載Decave1000模塊的UWB基站,并利用手機(jī)連接并記錄原始數(shù)據(jù)。如圖5所示,本文在中國礦業(yè)大學(xué)環(huán)測學(xué)院UWB測試場安排了3組障礙物,分別為墻體、人體以及混合的靜態(tài)實(shí)驗(yàn)。實(shí)驗(yàn)一位于房間C410,障礙物為墻體,圖中黑色基站為固定基站,白色基站為非視距標(biāo)簽。采集數(shù)據(jù)時(shí),在走廊安排與NLOS標(biāo)簽距離誤差不超過0.05 m的LOS標(biāo)簽來同時(shí)采集數(shù)據(jù)。實(shí)驗(yàn)二為試驗(yàn)場C區(qū)走廊,障礙物為人體,并與實(shí)驗(yàn)一共享固定基站。在采集每組數(shù)據(jù)時(shí)先保證標(biāo)簽位置不變,在同一距離處先后采集LOS數(shù)據(jù)以及人體干擾的NLOS數(shù)據(jù)。由于實(shí)驗(yàn)三標(biāo)簽在移動過程中與基站之間會間隔多個房間,障礙物包含墻體、木門、房內(nèi)陳設(shè)等等,故定義為混合障礙物。其移動標(biāo)簽的位置與實(shí)驗(yàn)二相同,采集策略與實(shí)驗(yàn)一相同。設(shè)備位置坐標(biāo)由全站儀標(biāo)定,具體距離信息如表2所示。所測數(shù)據(jù)的70%用于訓(xùn)練模型且未參與測試。

圖5 動態(tài)靜態(tài)實(shí)驗(yàn)的基站布局
m

表2 靜態(tài)實(shí)驗(yàn)中基站與標(biāo)簽之間的距離





圖6 不同特征參數(shù)的信道識別性能


表3 多場景多組特征向量的信道識別性能


圖7 引入新特征對信道識別算法性能的提升
表4為對I-LOS數(shù)據(jù)集進(jìn)行部分優(yōu)化前后的測距精度對比:雖然原始測距誤差均為厘米級,但優(yōu)化后的平均誤差仍下降0.013 m,提升22.84%,并均低于0.050 m;標(biāo)準(zhǔn)差降低0.168 m,提升56.31%,均方根誤差降低0.166 m,提升54.52%,優(yōu)化后二者均低于0.200 m。綜合3組實(shí)驗(yàn),I-LOS Type1數(shù)據(jù)的原始平均誤差為0.483 m,修正后為0.049 m;ILOS Type2數(shù)據(jù)的原始平均誤差為0.191 m,修正后為0.046 m,修正后二者的誤差均降低至厘米級。

表4 多場景I-LOS數(shù)據(jù)的優(yōu)化效果 m
表5中優(yōu)化后的I-NLOS的平均誤差降低1.00 m,提升86.02%,并均低于0.250m。標(biāo)準(zhǔn)差降低1.274 m,提升84.61%;均方根誤差降低1.626 m,提升85.17%。綜合3組實(shí)驗(yàn),I-NLOS Type1數(shù)據(jù)的平均誤差由3.081 m降低為0.176 m;I-NLOS Type2數(shù)據(jù)的平均誤差由1.595 m降低為0.128 m;I-NLOS Type3數(shù)據(jù)的平均誤差由0.717 m降低為0.169 m。修正后三者的誤差均限制0.200 m以內(nèi)。

表5 多場景I-NLOS數(shù)據(jù)的優(yōu)化效果 m
如圖8所示,本文誤差修正算法在3個場景中均優(yōu)于文獻(xiàn)[9]中的最優(yōu)性能。相比較于文獻(xiàn)[9]:本文平均提高8.4%測距精度,最高可達(dá)12.31%;標(biāo)準(zhǔn)差平均提高16.53%,最低為10.20%;均方根誤差平均提高14.06%,最高為19.30%。
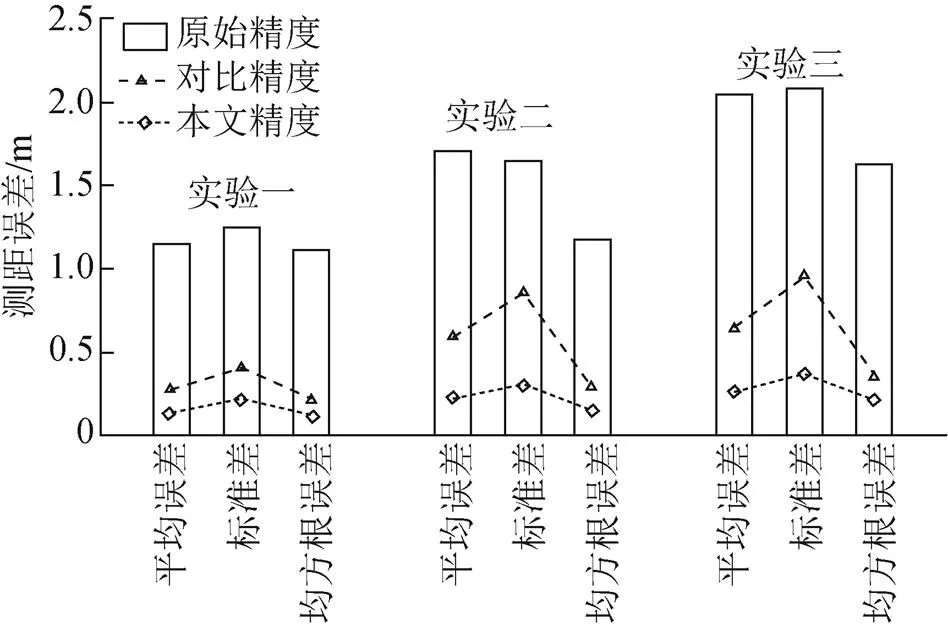
圖8 多場景測距誤差修正算法性能對比


圖9 原始動態(tài)定位結(jié)果可信評估

圖10 動態(tài)定位結(jié)果修正前后對比

圖11 動態(tài)定位結(jié)果誤差分布

表6 動態(tài)定位精度對比 m
5 結(jié)束語
[1] 閆大禹, 宋偉, 王旭丹, 等. 國內(nèi)室內(nèi)定位技術(shù)發(fā)展現(xiàn)狀綜述[J]. 導(dǎo)航定位學(xué)報(bào), 2019, 7(4): 5-12.
[2] 張忠娟. 基于 UWB 的室內(nèi)定位技術(shù)研究[D]. 天津: 天津大學(xué), 2012.
[3] GUVENC I, CHONG C C, WATANABE F, et al. NLOS identification and weighted least-squares localization for UWB systems using multipath channel statistics[J]. EURASIP Journal on Advances in Signal Processing, 2008: 271984.
[4] BORRAS J, HATRACK P, MANDAYAM N B. Decision theoretic framework for NLOS identification[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 48th IEEE Vehicular Technology Conference, VOLS 1-3. Ottawa, Canada: IEEE,1998: 1583-1587.
[5] CHEN P C. A non-line-of-sight error mitigation algorithm in location estimation[C]// The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of IEEE Wireless Communications and Networking Conference (Cat. No. 99TH8466). New Orleans, LA, USA: IEEE, 1999: 1525-3511.
[6] JIAO L, XING J, ZHANG X, et al. LCC-Rwgh: a NLOS error mitigation algorithm for localization in wireless sensor network[C]// Proceedings of 2007 IEEE International Conference on Control and Automation. IEEE, 2007: 1354-1359.
[7] 徐愛功, 劉韜, 隋心, 等. UWB/INS 緊組合的室內(nèi)定位定姿方法[J]. 導(dǎo)航定位學(xué)報(bào), 2017,5 (2): 14-19.
[8] PENG P, YU C, XIA Q, et al. An indoor positioning method based on UWB and visual fusion[J]. Sensors, 2022, 22(4): 1394.
[9] MARANO S, GIFFORD W M, WYMEERSCH H, et al. NLOS identification and mitigation for localization based on UWB experimental data[J]. IEEE Journal on Selected Areas in Communications, 2010, 28(7): 1026-1035.
[10] SILVA B, HANCKE G P. IR-UWB-based non-line-of-sight identification in harsh environments: principles and challenges[J]. IEEE Transactions on Industrial Informatics, 2016, 12(3): 1188-1195.
[11] ZANG Q, ZHAO D, ZUO S, et al. A low complexity NLOS error mitigation method in UWB localization[C]// The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 2015 IEEE/CIC International Conference on Communications in China. Shenzhen, China: IEEE, 2015: 1-5.
[12] YU K G, WEN K, LI Y, et al. A novel NLOS mitigation algorithm for UWB localization in harsh indoor environments[J]. IEEE Transactions on Vehicular Technology, 2018, 68(1): 686-699.
[13] VENKATESH S, BUEHRER R M. NLOS mitigation using linear programming in ultra wideband location-aware networks[J]. IEEE transactions on Vehicular Technology, 2007, 56(5): 3182-3198.
[14] WU S, MA Y, ZHANG Q, et al. NLOS error mitigation for UWB ranging in dense multipath environments[C]// The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 2007 IEEE Wireless Communications and Networking Conference. Hong Kong, China: IEEE, 2007: 1565-1570.
[15] HEIDARI M, PAHLAVAN K. Identification of the absence of direct path in TOA-based indoor localization systems[J]. International Journal of Wireless Information Networks, 2008, 15(3): 117-127.
[16] LI F, XIE W, WANG J, et al. A new two-step ranging algorithm in NLOS environment for UWB systems[C]// The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 2006 Asia-Pacific Conference on Communications. Busan, Korea(South): IEEE, 2006: 1-5.
[17] KUHN M J, TURNMIRE J, MAHFOUZ M R, et al. Adaptive leading-edge detection in UWB indoor localization[C]// The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 2010 IEEE Radio and Wireless Symposium (RWS). New Orleans, LA, USA: IEEE, 2010: 268-271.
[18] ZIMMERMANN H J. Fuzzy set theory—and its applications[M]. [S.l.]:Springer Science & Business Media, 2001:1-514.
A novel set of channel characteristic parameters for UWB indoor positioning
YANG Hongchao, WANG Yunjia, XU Shenglei, HUANG Lu
(1. School of Environment and Spatial Informatincs, China University of Ming and Technology, Xuzhou, Jiangsu 221116, China; 2. The 54th Research Institute of China Electronics Technology Group Corporation, Shijiazhuang 050081, China)
Aiming at the problem of poor accuracy and robustness of the existing ultra-wideband (UWB) channel identification parameters, we propose a new set of channel characteristic parameters based on channel impulse response. Combined with the support vector machine, we establish the non-line-of-sight (NLOS) channel recognition algorithm, classify ranging error according to the waveform features and formulate the optimization strategy. On the basis of optimizing the positioning accuracy, this paper introduces the concept of fuzzy to provide credibility evaluation for the original positioning results. Experimental results show that the average accuracy of the channel recognition algorithm can reach 93.94% after adding the new parameters, and the recall of line-of-sight (LOS) and NLOS data is 90.13% and 96.96%, respectively. After correction, the LOS ranging accuracy is increased by 22.84% on average, and the NLOS range ranging error is reduced by more than 1 m on average. The proportion of centimeter-level accuracy in dynamic positioning results is increased by 41.5%.
ultra-wideband; channel impulse response; NLOS identification; ranging error mitigation
TP391
A
2095-4999(2022)06-0043-10
楊宏超,汪云甲,徐生磊,等. 一組用于UWB室內(nèi)定位的新信道特征參數(shù)[J]. 導(dǎo)航定位學(xué)報(bào), 2022, 10(6): 43-52.(YANG Hongchao, WANG Yunjia, XU Shenglei, et al. A novel set of channel characteristic parameters for UWB indoor positioning[J]. Journal of Navigation and Positioning, 2022, 10(6): 43-52.)
10.16547/j.cnki.10-1096.20220606.
2022-07-29
國家重點(diǎn)研發(fā)計(jì)劃項(xiàng)目(2016YFB502102)。
楊宏超(1997—),男,黑龍江哈爾濱人,博士研究生,研究方向?yàn)槭覂?nèi)定位導(dǎo)航。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(bào)(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
