變參數(shù)線性跟蹤微分器及其在地平式大視場望遠(yuǎn)鏡中的應(yīng)用
2023-01-06 14:58:52楊曉霞鄧永停趙金宇
光學(xué)精密工程 2022年23期
楊曉霞,鄧永停,趙金宇,張 斌
(中國科學(xué)院 長春光學(xué)精密機(jī)械與物理研究所,吉林 長春 130033)
1 引 言
自抗擾控制方法(Active Disturbance Rejection Control,ADRC[1-2])是一種基于過程誤差來抑制或消除誤差的控制方法,在工業(yè)和工程領(lǐng)域得到了廣泛的應(yīng)用[3-8]。跟蹤微分器(Tracking Differentiator,TD[9])是自抗擾控制方法的一個(gè)主要組成部分,主要用于對不連續(xù)或帶隨機(jī)噪聲的信號提取連續(xù)信號及微分信號。大量的理論研究工作針對TD 的收斂性[10-11]、微分信號的提取能力以及濾波能力[12-14]展開,很多TD 的改進(jìn)形式[15-16]被提出并應(yīng)用在不同領(lǐng)域中[17-18]。事實(shí)上,TD 的一個(gè)主要作用是用于對控制系統(tǒng)中的參考信號進(jìn)行過渡過程安排,過渡過程信號作為參考信號和反饋信號之間的一個(gè)橋梁,當(dāng)參考信號發(fā)生大的跳變時(shí),仍然能夠保證反饋信號跟蹤一個(gè)連續(xù)漸變的過渡過程信號,從而使得控制誤差不會(huì)出現(xiàn)大的跳變,進(jìn)而保證控制系統(tǒng)的穩(wěn)定性和魯棒性。
TD 又分為線性TD(Linear TD,LTD)和非線性TD(Nonlinear TD,NLTD)。在安排過渡過程時(shí),LTD 的優(yōu)點(diǎn)在于算法復(fù)雜度低,簡單易實(shí)現(xiàn),缺點(diǎn)在于跟蹤不同幅值的階躍信號時(shí),需要調(diào)節(jié)快速因子參數(shù),否則容易造成LTD 輸出信號的速度和加速度過大或者過小,起不到過渡作用。NLTD 的優(yōu)點(diǎn)在于通過使用最速控制綜合函數(shù),使得在一定加速度的限制下能夠最快地跟蹤參考輸入,但是其算法復(fù)雜度高、計(jì)算量大,并且在跟蹤不同幅值的階躍信號時(shí)也存在輸出速度過大或過小的問題。
在使用跟蹤微分器安排過渡過程時(shí),應(yīng)該使得輸出的過渡過程信號的速度、加速度與物理系統(tǒng)的反饋能力相匹配,否則,過渡過程信號變化太快起不到過渡作用,變化太慢會(huì)影響系統(tǒng)的最大跟蹤能力。本文研究了一種帶速度和加速度飽和限制的變參數(shù)線性跟蹤微分器,它既能夠在參考信號和反饋信號之間起過渡橋梁的作用,又能夠充分發(fā)揮受控物理對象的最大速度和最大加速度能力。
2 TD 性能分析
經(jīng)典的安排過渡過程的工具是LTD 和NLTD。
2.1 線性跟蹤微分器
LTD 的離散形式如下:

其中:p0為設(shè)定值,h是離散化的采樣步長參數(shù),r1為快速因子,是系統(tǒng)唯一的可調(diào)參數(shù),它決定系統(tǒng)的收斂速度。當(dāng)設(shè)定值p0(k)≡p0為常值時(shí),定義x1第一次到達(dá)0.99p0的時(shí)間為過渡時(shí)間T0,定義VmaxLTD和amaxLTD分別是LTD 輸出的最大速度和最大加速度,也就是VmaxLTD=max(|x2|),amaxLTD=max(|x?2|),表1給出了LTD 的最大速度和最大加速度與參數(shù)和設(shè)定值之間的關(guān)系。
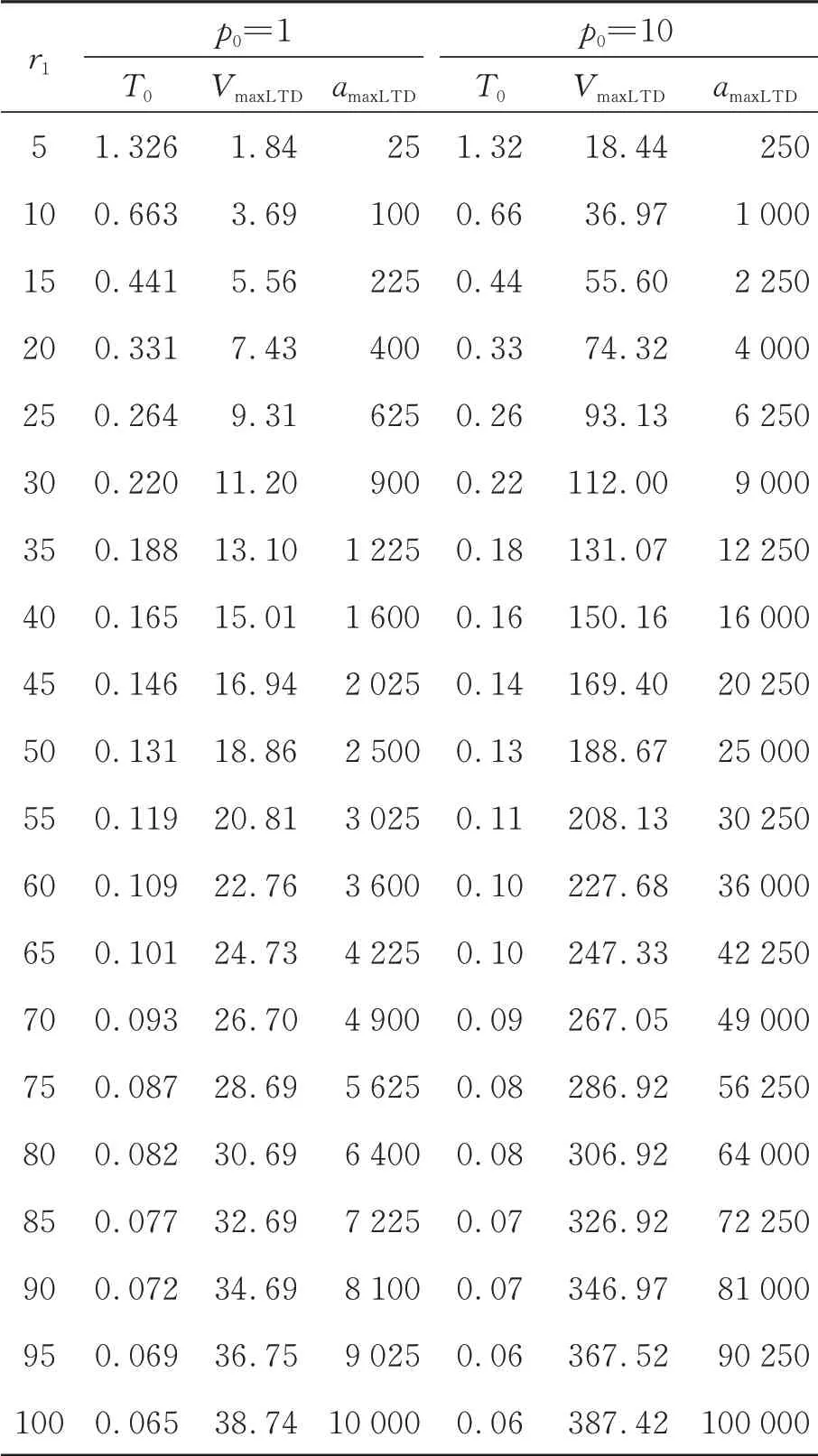
表1 LTD 的最大速度和最大加速度與參數(shù)的對應(yīng)關(guān)系Tab.1 Relationship among VmaxLTD,amaxLTD and parameters
使用MATLAB 的數(shù)據(jù)擬合工具,可以得到擬合表達(dá)式:
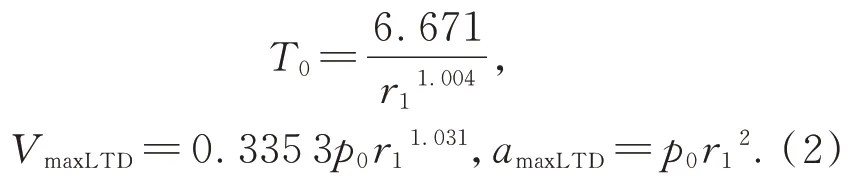
圖1 給出了當(dāng)p0=1 時(shí)離散計(jì)算結(jié)果與擬合函數(shù)曲線之間的關(guān)系。可以看出,過渡過程時(shí)間T0與參數(shù)r1成反比,并且與最終的穩(wěn)態(tài)響應(yīng)值沒有關(guān)系,這說明使用LTD 安排過渡過程時(shí),只要參數(shù)r1確定,跟蹤穩(wěn)態(tài)值1 和跟蹤穩(wěn)態(tài)值100 或者10 000 的時(shí)間是相同的,這就導(dǎo)致LTD 給出的VmaxLTD和amaxLTD均與穩(wěn)態(tài)值p0相關(guān),p0越大,VmaxLTD和amaxLTD越大,而如果VmaxLTD和amaxLTD遠(yuǎn)遠(yuǎn)超過物理系統(tǒng)的反饋速度和加速度能力,那么物理系統(tǒng)的反饋信號就無法跟蹤LTD 所給出的過渡過程信號,此時(shí)LTD 所給出的信號就起不到過渡作用。
圖1 T0,VmaxLTD,amaxLTD 與LTD 參數(shù)r1的關(guān)系Fig.1 Relationship between T0,VmaxLTD,amaxLTD and r1
另一方面,通過簡單地在LTD 的輸出信號上加入速度和加速度飽和環(huán)節(jié),是不能夠解決這個(gè)問題的,因?yàn)橥ㄟ^仿真計(jì)算可以看出,此時(shí)LTD 的輸出會(huì)發(fā)生振蕩。設(shè)p0=100,r1=15,h=0.001,根據(jù)式(2)可以推算出LTD 給出的最大速度和最大加速度如下:

設(shè)物理系統(tǒng)反饋的最大速度Vmax和最大加速度amax如下:

圖2 給出了加入式(4)的速度和加速度上界后LTD 的輸出曲線。
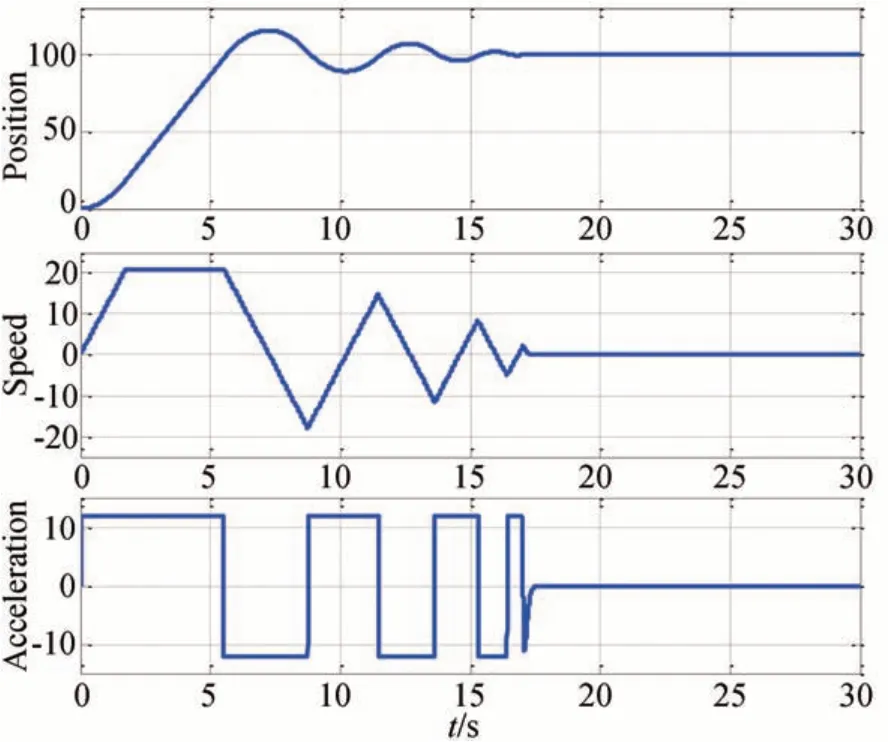
圖2 帶速度和加速度飽和限制的LTD 輸出Fig.2 Output of LTD with speed and acceleration saturation
2.2 非線性跟蹤微分器
離散最速跟蹤微分器利用fhan 函數(shù)實(shí)現(xiàn),它的加速度通過參數(shù)r限定,具體形式如下:
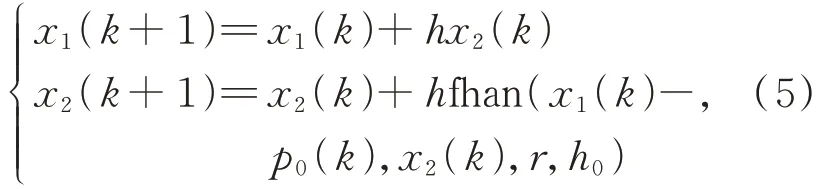
其中:h是采樣周期,r是快速因子,h0是濾波因子,可以大于采樣周期h,fhan 是非線性函數(shù),具體形式如下:
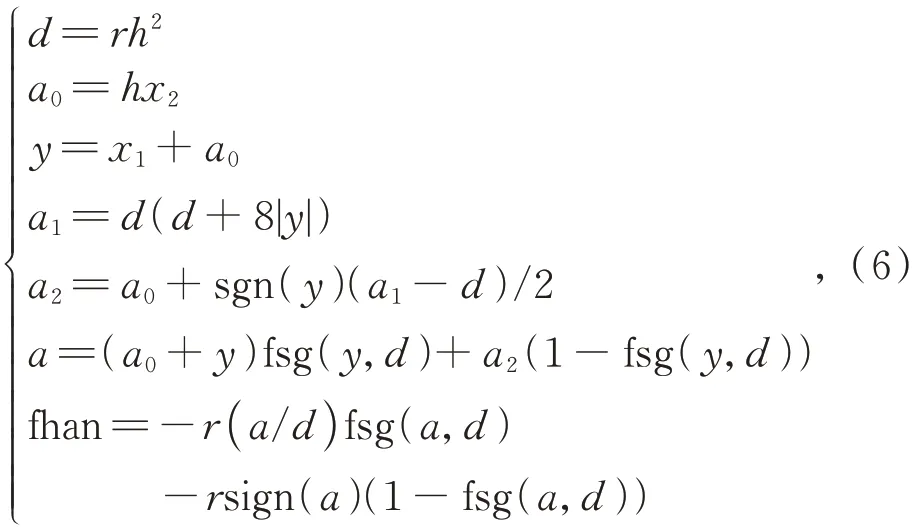
其中:fsg(a,d)=(sgn(x+d)-sgn(x-d))/2,sgn(·)是符號函數(shù)。經(jīng)過計(jì)算可以得到T0,VmaxN-LTD以及amaxNLTD與參數(shù)r和p0的關(guān)系如下:
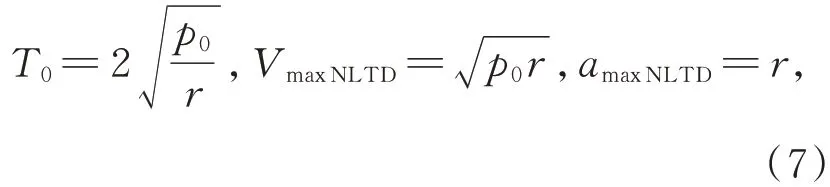
其中VmaxNLTD和amaxNLTD分別是NLTD 的最大速度和最大加速度。可以看出,NLTD 的加速度是具有上限的,但是最大速度跟穩(wěn)態(tài)值p0有關(guān),沒有上限,因此帶有速度飽和Vmax的NLTD 設(shè)計(jì)如下:

與LTD 不同,給NLTD 加入速度飽和限制之后不會(huì)引起信號的波動(dòng)。圖3 給出了帶有速度飽和的NLTD 輸出曲線,其中p0=100,Vmax=21,r=12,h=0.001,h0=0.01。
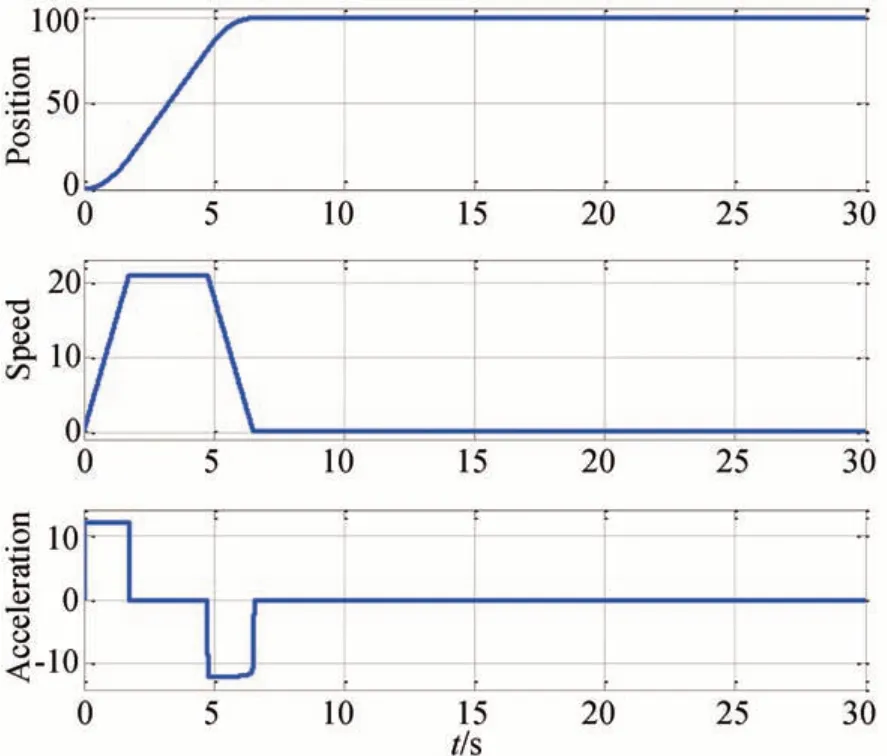
圖3 帶速度飽和的NLTD 輸出Fig.3 Output of NLTD with speed saturation
帶有速度飽和的NLTD 可以給出與物理系統(tǒng)反饋能力相匹配的過渡過程信號,在實(shí)現(xiàn)過渡作用的同時(shí)能夠充分發(fā)揮系統(tǒng)的最大反饋能力。但是,由于非線性函數(shù)fhan 的計(jì)算比較復(fù)雜,不利于在工程中的實(shí)時(shí)實(shí)現(xiàn)。本文給出一種變參數(shù)LTD,合理地將參數(shù)r設(shè)計(jì)為跟蹤誤差的函數(shù),克服了LTD 的不足,并且比帶有速度飽和的NLTD 更簡單易實(shí)現(xiàn)。
3 變參數(shù)線性跟蹤微分器設(shè)計(jì)
連續(xù)的VLTD 設(shè)計(jì)如下:
其中時(shí)變參數(shù)r1(t)設(shè)計(jì)如下:
其中:r可以設(shè)計(jì)為反饋物理信號的最大加速度,σ≥1 是唯一的可調(diào)參數(shù)。將式(10)代入式(9)可以得到VLTD 的一般形式如下:

可以看出,VLTD 與LTD 的區(qū)別在于將快速因子設(shè)置為一個(gè)時(shí)變函數(shù),它設(shè)計(jì)為跟蹤誤差的減函數(shù),以此保證初期跟蹤誤差非常大時(shí),過渡過程的加速度也不會(huì)非常大。當(dāng)跟蹤誤差小于1 時(shí),VLTD 就變?yōu)長TD。
3.1 VLTD 的收斂性分析
對VLTD 的收斂性進(jìn)行分析,得到如下定理。
定理1,設(shè)p0是常值,對于任意的初值x1(0)和x2(0)=0,VLTD 都能在有限時(shí)間內(nèi)收斂至線性區(qū)間內(nèi),其中線性區(qū)間定義為跟蹤誤差的絕對值小于1 的區(qū)間。
證 明:設(shè)z1(t)=x1(t)-p0,z2(t)=x2(t),σr=σ,那么VLTD 可以簡化為:

因此只需證明對于任意的z1(0) 和z2(0)=0,存在時(shí)間點(diǎn)tc>0 使得|z1(tc)|<1。
情形1:如果|z1(0)|<1,那么當(dāng)t>0 時(shí)系統(tǒng)的變化規(guī)律如下:

上述微分方程的解如下:

由于z2(0)=0,所以有:

對于情形1,當(dāng)系統(tǒng)的初值處于線性區(qū)間時(shí),系統(tǒng)始終處于線性區(qū)間內(nèi)。
情形2:如果z1(0)≥1,那么系統(tǒng)的變化規(guī)律如下:

整理第二個(gè)方程得到:

在時(shí)間區(qū)間[0,τ]上對等式兩邊進(jìn)行積分,得到:

進(jìn)一步整理得:

將式(19)在時(shí)間區(qū)間[0,t]上進(jìn)行積分,得到:
如果存在時(shí)間點(diǎn)tc∈[0,t],使得z1(tc)<1,那么結(jié)論成立。而如果對于任意的τ∈[0,t]都有z1(τ)≥1,那么:

整理式(21)得:

顯然,不等式的右邊是關(guān)于t的二次函數(shù),當(dāng)t>4(-1)/σr時(shí),式(22)的右邊相對于t是一個(gè)單調(diào)遞減函數(shù),并且:

因此,一定存在tc>0,使得:

從而有:

結(jié)論成立。
情形3:如果z1(0)≤-1,那么系統(tǒng)的變化規(guī)律如下:

整理第二個(gè)方程可得:

將 式(27)的 兩 端 在 時(shí) 間 區(qū) 間[0,τ] 上 積分得:

進(jìn)一步整理得:

將上述方程的兩邊在時(shí)間區(qū)間[0,t]上積分得:
如果存在tc∈[0,t],使得z1(tc)>-1,那么結(jié) 論 成 立。如 果 對 于 任 意 的?τ∈[0,t]都 有z1(τ)≤-1,那么有:

因此有:

顯然,不等式右邊是一個(gè)關(guān)于t的二次函數(shù),當(dāng)t>時(shí),不 等 式 右 邊 是 一個(gè)關(guān)于t的單調(diào)遞增函數(shù),并且有:
所以存在tc>0,使得:

因此有:

定理結(jié)論成立。
上述結(jié)論說明,對于任意的初值x1(0),VLTD 必定能在有限時(shí)間內(nèi)收斂至線性區(qū)間內(nèi)。
3.2 VLTD 的速度和加速度上限分析
設(shè)tvmax為VLTD 到達(dá)速度上限的時(shí)間點(diǎn),那么有x?2(tvmax)=0,也就是:

進(jìn)一步整理得:

如果|x1(tvmax)-p0|<1,那么有:

如果|x1(tvmax)-p0|≥1,那么有:

也就是:

根據(jù)VLTD 的特點(diǎn),|x1(tvmax)-p0|≥p0/2,因此VLTD 的最大速度滿足:

不等式(40)說明當(dāng)|x1(tvmax)-p0|≥1 時(shí),VLTD 的速度輸出最大值不存在上限。
另一方面,可以推導(dǎo)出VLTD 在初始時(shí)刻達(dá)到最大加速度σ2r,并且減速階段的加速度明顯比加速階段的加速度小。為了避免VLTD 減速階段的加速度過小,一般選取參數(shù)σ>1,這樣就會(huì)導(dǎo)致加速階段的加速度會(huì)超過物理系統(tǒng)的最大反饋加速度,因此,在VLTD 的加速度輸出上加入加速度飽和上限即可。
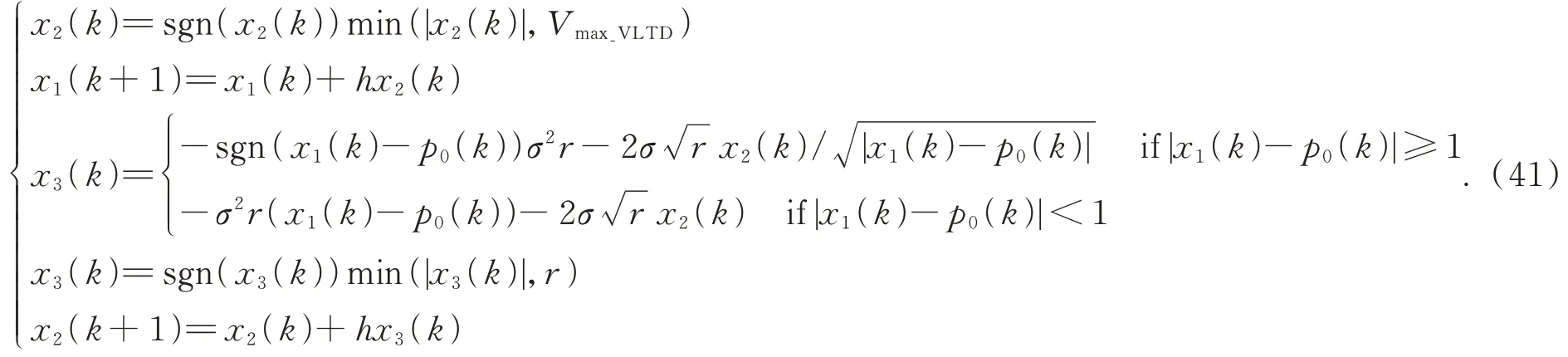
通過上面的分析可知,有必要對VLTD 的速度和加速度輸出加入飽和限制,記x3為VLTD 的加速度輸出,VmaxVLTD為VLTD 的速度上限,那么帶有速度和加速度飽和限制的離散VLTD 形式設(shè)計(jì)如下:
3.3 仿真設(shè)計(jì)
設(shè)物理系統(tǒng)的最大速度和最大加速度分別為Vmax=20 和amax=12,VLTD 的參數(shù)取值如下:采 樣 步 長h=0.001,σ=2.3,r=12,速 度 上 限VmaxVLTD=20,加速度上限為r,穩(wěn)態(tài)響應(yīng)值p0=100,50,10,1,圖4 分別給出了加入速度和加速度限制前后的VLTD 輸出對比曲線。可以看出,加入速度和加速度飽和限制之后,VLTD 的收斂性沒有受到影響,而且在p0較大,也就是VLTD 本身輸出的最大速度超過VmaxVLTD時(shí),速度飽和才起作用;而在p0較小時(shí),也就是VLTD 本身輸出的最大速度不超過VmaxVLTD時(shí),速度飽和不起作用。一旦σ確定之后,無論p0取值如何,加速度飽和都會(huì)起作用,因?yàn)橹灰遥?,那么初始段的加速度一定會(huì)大于r。
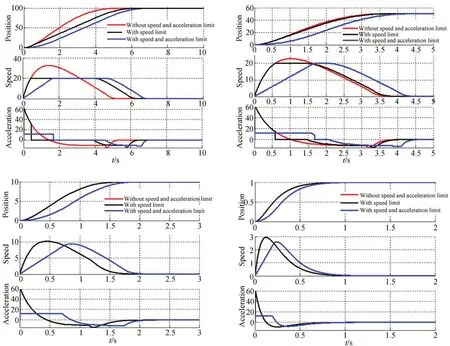
圖4 速度及加速度飽和對VLTD 輸出的影響Fig.4 Impact of speed and acceleration saturation on output of VLTD
將帶速度和加速度飽和的VLTD(41)與帶速度飽和的NLTD(7)進(jìn)行比較,其中VLTD 的參數(shù)取值與上面仿真相同,NLTD 的參數(shù)取值為r=12,h0=0.01,穩(wěn)態(tài)值p0取為100,圖5 給出了兩者的對比曲線。可以看出,VLTD 可以達(dá)到與NLTD 幾乎相同的效果,并且從加速度曲線上可以看出,在接近穩(wěn)態(tài)值時(shí),VLTD 的加速度曲線更平滑,這有利于反饋信號的平穩(wěn)快速地跟蹤。另外,VLTD 的計(jì)算復(fù)雜度遠(yuǎn)遠(yuǎn)小于NLTD,在使用時(shí)能夠節(jié)省計(jì)算內(nèi)存空間,有利于算法的實(shí)時(shí)性。
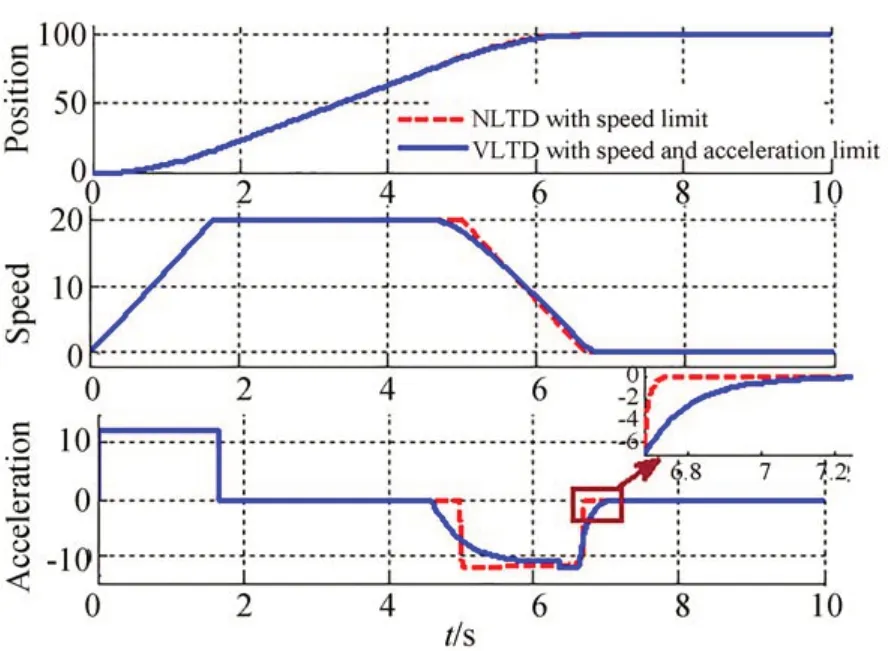
圖5 VLTD 和NLTD 輸出曲線的對比Fig.5 Comparison of output between VLTD and NLTD
4 VLTD 在地平式大視場望遠(yuǎn)鏡中的應(yīng)用
4.1 地平式大視場望遠(yuǎn)鏡搜索路徑分析
大視場望遠(yuǎn)鏡主要針對地球同步軌道(GEO)、同步轉(zhuǎn)移軌道(GTO)及中高軌(MEO)的目標(biāo)進(jìn)行搜索、捕獲、跟蹤和測量。不同軌道的目標(biāo)特性不同,相應(yīng)的工作模式有所不同。由于極軸式望遠(yuǎn)鏡受結(jié)構(gòu)設(shè)計(jì)的限制,望遠(yuǎn)鏡口徑不宜過大,因此將米級大視場望遠(yuǎn)鏡設(shè)計(jì)為地平式結(jié)構(gòu)。由于地平式望遠(yuǎn)鏡方位軸和俯仰軸的耦合作用,無論何種工作模式都會(huì)牽扯到方位軸的頻繁變步長調(diào)轉(zhuǎn),即使是對固定赤緯的目標(biāo)進(jìn)行搜索。
本文以GEO 目標(biāo)為例進(jìn)行說明,GEO 目標(biāo)的星下點(diǎn)赤緯范圍為±15°,設(shè)觀測站址的經(jīng)緯度為(?s,σs),A是地平式望遠(yuǎn)鏡的方位角,E是地平式望遠(yuǎn)鏡的俯仰角。以望遠(yuǎn)鏡俯仰角大于10°作為目標(biāo)可觀測的判別條件,可以計(jì)算出觀測站能有效觀測±15°赤緯帶的GEO 目標(biāo)的星下點(diǎn)經(jīng)度為σs±σ0的目標(biāo),其中σ0由站址緯度?s決定。以兩個(gè)不同緯度的站址為例,設(shè)?s1=24°N,?s2=46°N,望遠(yuǎn)鏡視場為2.5°×2.5°,搜索路徑采取“Z”字型模式,以星下點(diǎn)緯度不變,經(jīng)度以2.5°作為階躍步長,計(jì)算在不同緯度觀測站觀測±15°赤緯帶目標(biāo)時(shí)方位角和俯仰角的變化情況,并且分別計(jì)算了每次調(diào)轉(zhuǎn)時(shí)方位角和俯仰角分別調(diào)轉(zhuǎn)的步長,得到的曲線如圖6 和圖7所示。
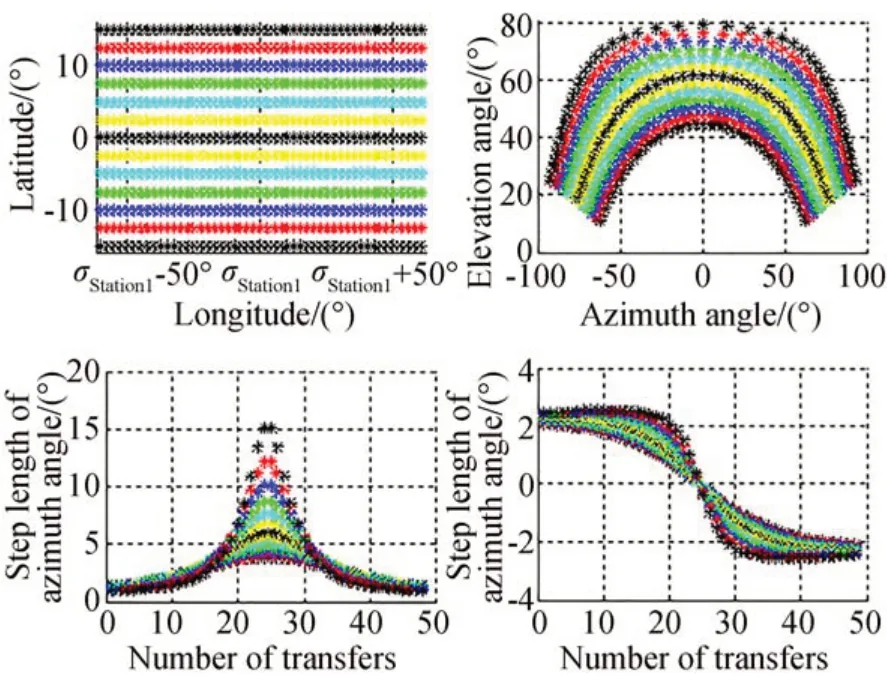
圖6 ?s1=24°N 時(shí)方位角和俯仰角的變化規(guī)律Fig.6 Variation of azimuth and elevation angles with ?s1 of 24°N
對比圖6 和圖7 可以看出,觀測站點(diǎn)緯度越低,觀測GEO 目標(biāo)帶的俯仰角越大,能有效觀測的目標(biāo)帶經(jīng)度范圍就越大,調(diào)轉(zhuǎn)單個(gè)視場時(shí),方位角需要調(diào)轉(zhuǎn)的步長就越大。對于地平式望遠(yuǎn)鏡來說,即使固定步長掃描同一赤緯的空間目標(biāo),方位軸仍是進(jìn)行變步長的位置調(diào)轉(zhuǎn)。另外,由于地平式望遠(yuǎn)鏡兩個(gè)軸的耦合運(yùn)動(dòng),即使掃描同一赤緯的空間目標(biāo),望遠(yuǎn)鏡的俯仰角并不是固定不變的,而是需要進(jìn)行變步長的位置調(diào)轉(zhuǎn),上述兩種情況中俯仰軸分別進(jìn)行了0~2°不等的位置調(diào)轉(zhuǎn)。在跟蹤模式下,當(dāng)切換被跟蹤目標(biāo)時(shí),也需要調(diào)轉(zhuǎn)方位軸和俯仰軸位置,而且調(diào)轉(zhuǎn)的步長與所切換的兩個(gè)目標(biāo)的相對位置有關(guān)。
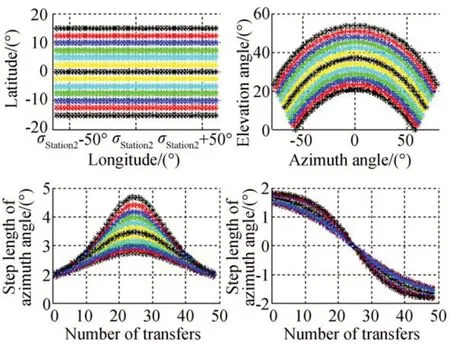
圖7 ?s2=46°N 時(shí)方位角和俯仰角的變化規(guī)律Fig.7 Variation of azimuth and elevation angles with ?s2 of 46°N
4.2 傳統(tǒng)的位置環(huán)分段控制模式
對于地平式大視場望遠(yuǎn)鏡來說,無論是進(jìn)行搜索模式還是跟蹤模式,都會(huì)頻繁涉及到望遠(yuǎn)鏡兩個(gè)軸的變步長位置階躍,而且階躍步長大小不一。傳統(tǒng)的望遠(yuǎn)鏡主軸控制,一般對位置控制環(huán)采用分段控制的方式,當(dāng)位置誤差較大時(shí),位置環(huán)輸出常值;當(dāng)位置誤差較小時(shí),則進(jìn)行閉環(huán)解算。位置環(huán)輸出的具體形式如下:
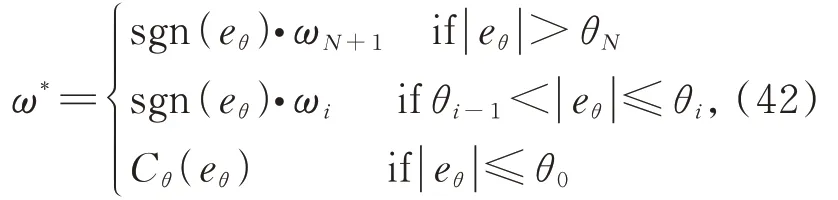
其中:i=1,2,...,N,ω*是位置控制環(huán)的輸出,eθ=θref-θ是位置誤差,θref是位置參考值,θ是位置反饋值,θ0<θ1<…<θN是預(yù)設(shè)的閾值,ω1<ω2<…<ωN+1是位置控制環(huán)輸出的常值,Cθ是位置閉環(huán)控制器。該方法的缺點(diǎn)在于分段的過程比較依賴經(jīng)驗(yàn)值,例如θi,ωi以及分段數(shù)N的選擇都需要通過多次試驗(yàn),才能使所設(shè)計(jì)的分段參數(shù)與物理系統(tǒng)的實(shí)際響應(yīng)相匹配,否則如果切入閉環(huán)的速度過大或者過小,都會(huì)影響系統(tǒng)的響應(yīng)品質(zhì)。另外,一旦物理系統(tǒng)的最大速度或者最大加速度發(fā)生改變(例如系統(tǒng)的轉(zhuǎn)動(dòng)慣量發(fā)生改變、或者驅(qū)動(dòng)器的驅(qū)動(dòng)電流、驅(qū)動(dòng)電壓發(fā)生改變等),均需要對分段進(jìn)行重新設(shè)計(jì),否則會(huì)出現(xiàn)因分段與系統(tǒng)響應(yīng)能力不匹配所造成的響應(yīng)過慢或者超調(diào)等現(xiàn)象。
4.3 VLTD 在地平式大視場望遠(yuǎn)鏡快速定位中的應(yīng)用
將帶有速度和加速度飽和限制的VLTD 應(yīng)用于望遠(yuǎn)鏡軸系的快速調(diào)轉(zhuǎn)定位中,并且與傳統(tǒng)的位置分段控制方式進(jìn)行對比實(shí)驗(yàn)。實(shí)驗(yàn)對象是某1 m 級地平式大視場望遠(yuǎn)鏡的方位軸,軸系采用交流永磁同步電機(jī)驅(qū)動(dòng),驅(qū)動(dòng)器和控制器硬件平臺采用DSP+FPGA,驅(qū)動(dòng)電源采用48 V 的開關(guān)電源,驅(qū)動(dòng)電流的最大值為10 A,位置反饋信號采用29 位絕對式編碼器測量,速度反饋信號通過位置反饋信號差分并濾波后得到,控制方式采用電流+速度+位置的三閉環(huán)方式,控制框圖如圖8 和圖9 所示。其中,圖8 的位置環(huán)采用傳統(tǒng)的位置分段控制方式,圖9 的位置環(huán)采用VLTD進(jìn)行位置參考信號的過渡。除了位置誤差的處理方式不同,兩者的三環(huán)控制器設(shè)計(jì)完全相同,電流控制器的設(shè)計(jì)采用傳統(tǒng)的PI 控制器,速度環(huán)控制器采用ADRC 控制方式,具體設(shè)計(jì)方法見文獻(xiàn)[19],此處不再贅述,位置環(huán)控制器采用最簡單的比例控制器。

圖8 采用位置分段的控制框圖Fig. 8 Control diagram of position section method

圖9 采用VLTD 的控制框圖Fig. 9 Control diagram of VLTD method
在進(jìn)行位置環(huán)分段以及VLTD 的設(shè)計(jì)之前,均需要對系統(tǒng)的最大反饋能力進(jìn)行摸底測試,得到系統(tǒng)的最大反饋速度為20.5(°)/s,最大加速度約為19.6(°)/s2。在不存在機(jī)械限位的前提下,根據(jù)就近調(diào)轉(zhuǎn)原則,方位軸的最大調(diào)轉(zhuǎn)步長為180°。為了驗(yàn)證系統(tǒng)對不同步長的位置響應(yīng)能力,用兩種實(shí)驗(yàn)方法分別進(jìn)行2°~180°之間不同階躍步長的位置階躍實(shí)驗(yàn),其中位置環(huán)分段參數(shù) 取 值 為:N=8,θ0=0.01°,θ1=0.017°,θ3=0.28°,θ4=1.1°,θ5=2.2°,θ6=11°,θ7=22°,θ8=33°;ω1=0.1(°)/s,ω2=0.2(°)/s,ω3=0.5(°)/s,ω4=1.9(°)/s,ω5=3.8(°)/s,ω6=5.3(°)/s,ω7=11.8(°)/s,ω8=16.7(°)/s,ω9=20(°)/s。
圖10~圖13 分別給出了幾個(gè)典型的實(shí)驗(yàn)結(jié)果,其中p0=2°,10°,30°和180°。可以看出,使用位置分段的方式均能夠達(dá)到無超調(diào)的響應(yīng)效果,但是由于分段的設(shè)置,在減速的過程中不能夠充分發(fā)揮系統(tǒng)的最大減速能力,所以減速段的時(shí)間明顯變長。
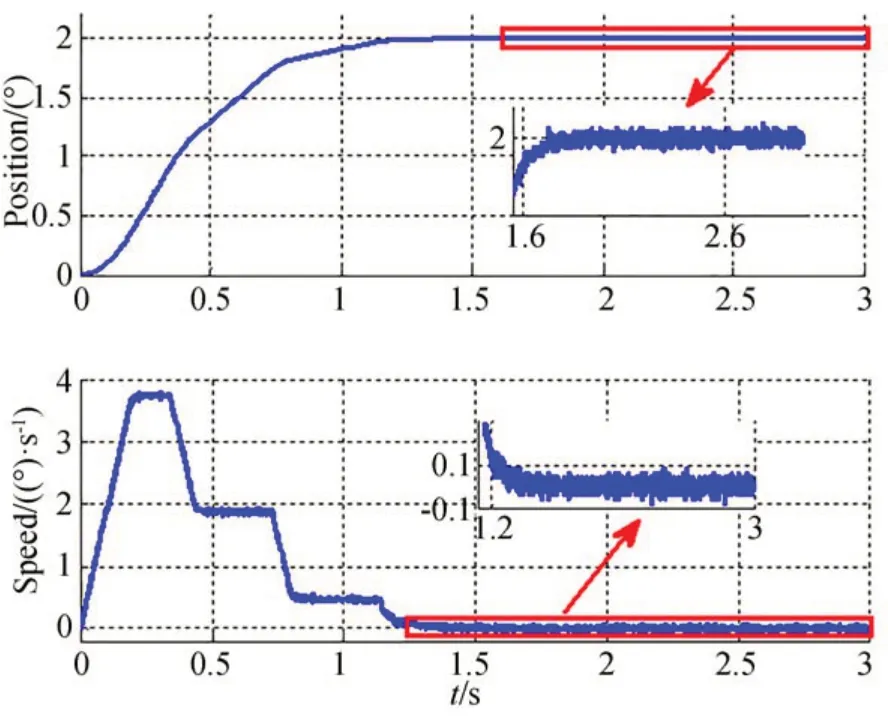
圖10 當(dāng)p0=2 時(shí)的位置階躍響應(yīng)Fig.10 Position step response with p0=2
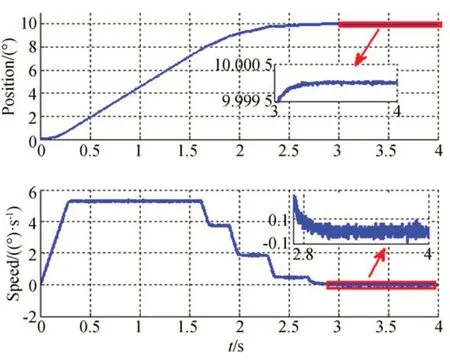
圖11 當(dāng)p0=10 時(shí)的位置階躍響應(yīng)Fig.11 Position step response with p0=10
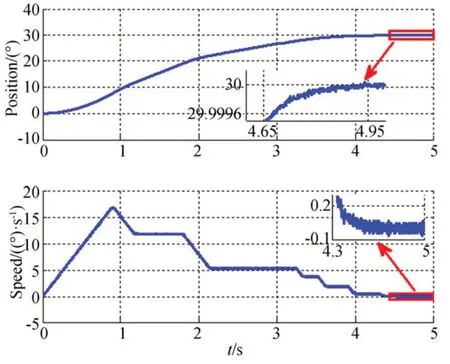
圖12 當(dāng)p0=30 時(shí)的位置階躍響應(yīng)Fig.12 Position step response with p0=30
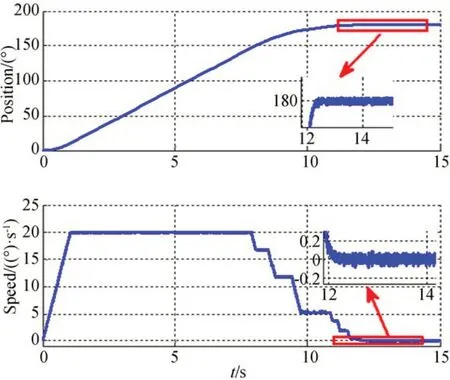
圖13 當(dāng)p0=180 時(shí)的位置階躍響應(yīng)Fig.13 Position step response with p0=180
使用VLTD 過渡的實(shí)驗(yàn)中,參數(shù)取值為h=0.001,σ=2.3,r=19,Vmax_VLTD=20。為了驗(yàn)證VLTD 的輸出速度作為速度前饋的作用,分別完成了帶有速度前饋和不帶有速度前饋的實(shí)驗(yàn),幾組典型的實(shí)驗(yàn)結(jié)果如圖14~圖17 所示。從實(shí)驗(yàn)結(jié)果可以看出,使用帶速度和加速度限制的VLTD 安排的過渡過程能夠按照預(yù)設(shè)的速度和加速度引導(dǎo)望遠(yuǎn)鏡軸系運(yùn)動(dòng),在加速和減速段都能夠充分發(fā)揮出系統(tǒng)的反饋能力。
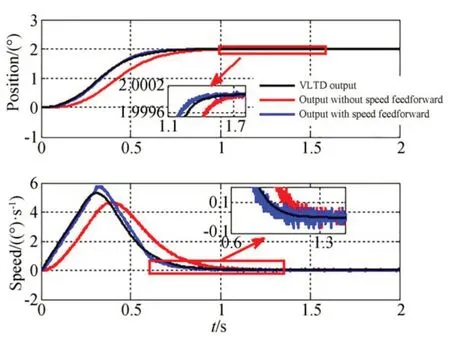
圖14 當(dāng)p0=2 時(shí)的位置階躍響應(yīng)Fig.14 Position step response with p0=2
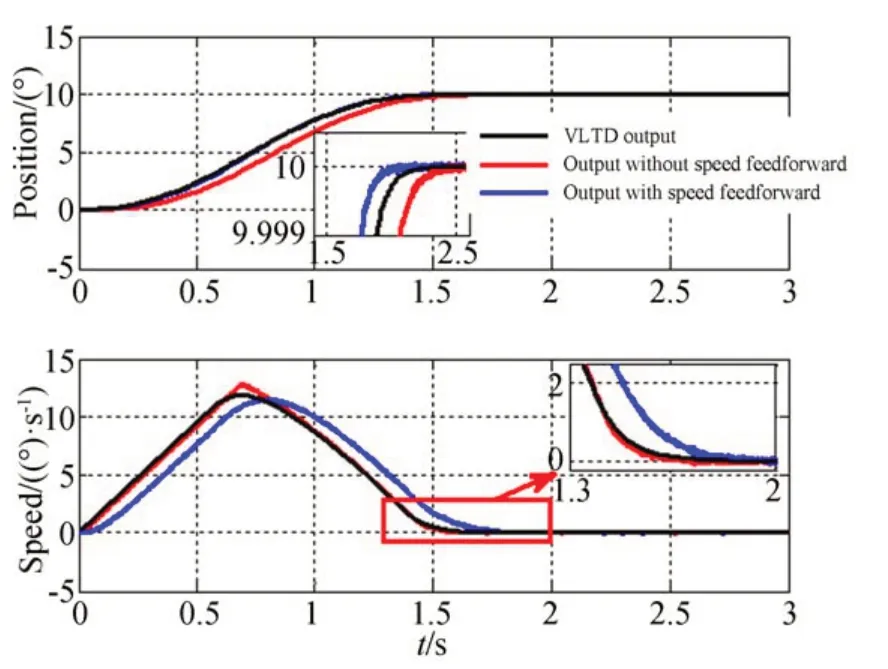
圖15 當(dāng)p0=10 時(shí)的位置階躍響應(yīng)Fig.15 Position step response with p0=10
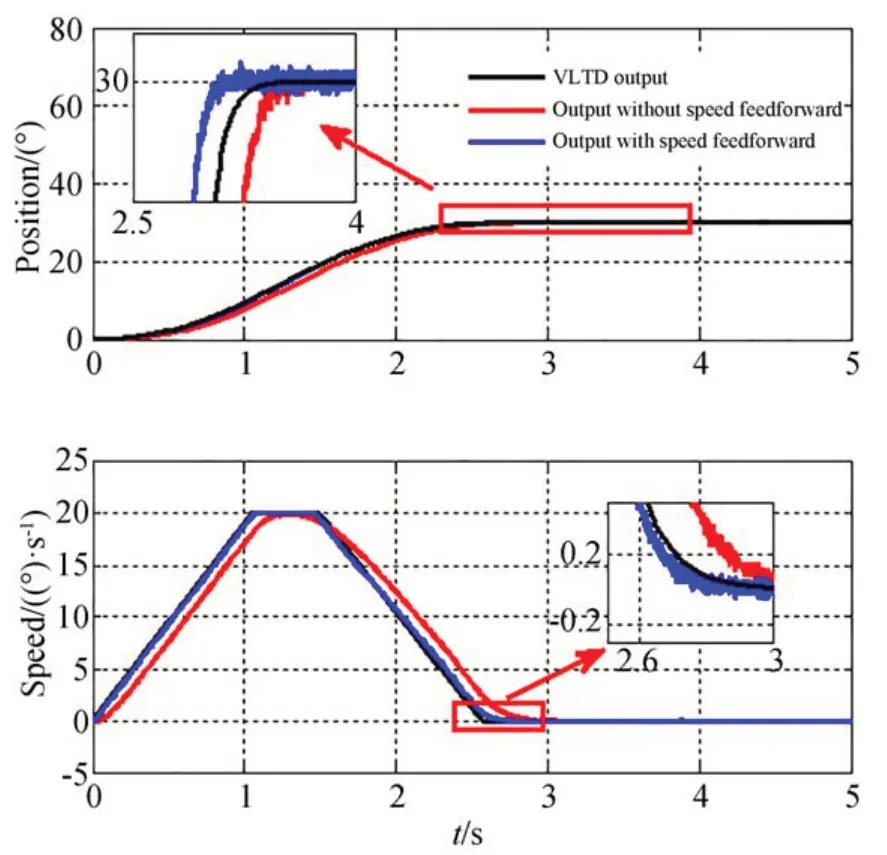
圖16 當(dāng)p0=30 時(shí)的位置階躍響應(yīng)Fig.16 Position step response with p0=30
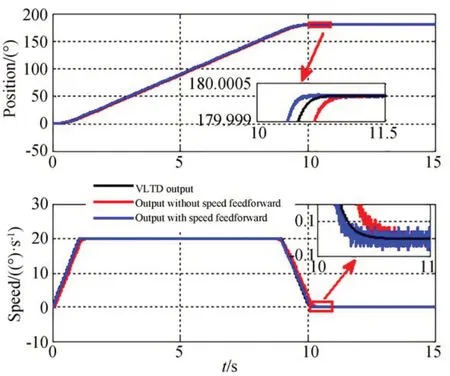
圖17 當(dāng)p0=180 時(shí)的位置階躍響應(yīng)Fig.17 Position step response with p0=180
表2 列出了實(shí)驗(yàn)中位置響應(yīng)進(jìn)入5″誤差帶的時(shí)間t1和1″誤差帶的時(shí)間t2,它定量地描述了不同實(shí)驗(yàn)方法的效果。可以看出,使用VLTD 安排過渡過程的方式可以使得動(dòng)態(tài)響應(yīng)時(shí)間明顯變短,并且利用VLTD 的第二個(gè)輸出作為速度前饋能夠進(jìn)一步縮短響應(yīng)時(shí)間,與位置分段方法相比,響應(yīng)時(shí)間縮短了大約15%~37%,有效地提高了望遠(yuǎn)鏡的搜索效率,對于大視場望遠(yuǎn)鏡具有重要的意義。
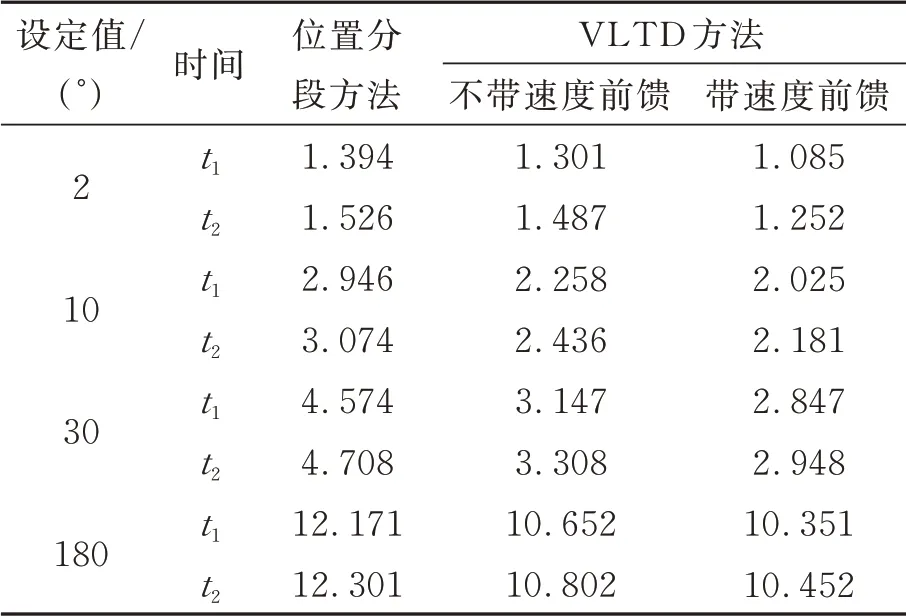
表2 位置響應(yīng)進(jìn)入5″和1″誤差帶的時(shí)間Tab.2 Time points for position response in 5″and 1″position error bands (s)
對比實(shí)驗(yàn)中只給出了一種分段取法,雖然通過增加分段數(shù)N以及優(yōu)化分段策略可以進(jìn)一步提高該方法的響應(yīng)速度,但是優(yōu)化過程需要進(jìn)行大量的實(shí)驗(yàn),而且分段數(shù)N越多,程序的計(jì)算復(fù)雜度越高,也不利于程序的二次移植。而本文給出的VLTD 設(shè)計(jì)方法,參數(shù)設(shè)定方法簡單,只需測量物理系統(tǒng)的最大反饋速度和加速度,就可以進(jìn)行參數(shù)的設(shè)定,且程序可以進(jìn)行快速移植。
5 結(jié) 論
本文給出了一種為物理信號安排過渡過程的工具——變參數(shù)線性跟蹤微分器,它是在分析已有線性跟蹤微分器安排過渡過程的不足基礎(chǔ)上提出的,所給出的過渡過程能夠很好地與物理系統(tǒng)的反饋能力相匹配,在起到過渡作用的同時(shí),又能夠充分發(fā)揮系統(tǒng)的最大反饋能力。從理論上對VLTD 的收斂性進(jìn)行了證明,并且給出了仿真計(jì)算。將VLTD 應(yīng)用于地平式大視場望遠(yuǎn)鏡的快速調(diào)轉(zhuǎn)控制中,替代傳統(tǒng)的位置環(huán)基于位置誤差的分段控制方式,實(shí)驗(yàn)結(jié)果表明,在各種不同大小步長的位置階躍響應(yīng)中,響應(yīng)時(shí)間可以縮短大約15%~37%,大大提高了望遠(yuǎn)鏡的搜索效率。所設(shè)計(jì)的安排過渡過程方法的參數(shù)簡單易設(shè)置,利于在工程中的調(diào)試和實(shí)現(xiàn)。
本文中的分析以及實(shí)驗(yàn)均是針對常值信號進(jìn)行的,VLTD 也可應(yīng)用于對時(shí)變信號的過渡過程安排,在后續(xù)工作中會(huì)對VLTD 跟蹤時(shí)變信號的性質(zhì)進(jìn)行分析。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25