永磁同步電機(jī)無傳感器高速控制研究*
2023-01-06 05:44:02瞿云飛馬繼先沈曉龍
計(jì)算機(jī)與數(shù)字工程 2022年10期
關(guān)鍵詞:系統(tǒng)
瞿云飛 馬繼先 董 惲 沈曉龍
(江蘇科技大學(xué) 鎮(zhèn)江 212100)
1 引言
永磁同步電機(jī)(PMSM)由于其動態(tài)響應(yīng)快、轉(zhuǎn)矩慣量比大、功率密度高等優(yōu)勢,在航海等領(lǐng)域得到了廣泛應(yīng)用,其具有巨大的發(fā)展?jié)摿Αo傳感器控制省去了機(jī)械的傳感器,提高了系統(tǒng)可靠性,又降低了對環(huán)境的要求,減少了電氣連接線路,避免了一系列問題[1]。目前,無傳感器控制技術(shù)大體可分為以下兩類:一種是利用電機(jī)凸極特性來估算位置信息,估算精度較高;另一種是利用反電動勢或者磁鏈信息來估算轉(zhuǎn)子位置信息與轉(zhuǎn)速,這種方法只能在中高速段估算。文獻(xiàn)[2]采用卡爾曼濾波算法,系統(tǒng)誤差以及測量噪音相對較小,系統(tǒng)抗干擾性好。文獻(xiàn)[3]采用滑模算法,系統(tǒng)對電機(jī)參數(shù)不敏感,故系統(tǒng)魯棒性好。文獻(xiàn)[4]采用MRAS算法,控制系統(tǒng)較為簡單。本文用滑模觀測器在針對高速段估算反電動勢的過程中容易產(chǎn)生“抖振”的問題,從切換函數(shù)、濾波器、相位延遲[5]三個方面進(jìn)行改進(jìn)來減小系統(tǒng)的“抖振”。最后,在Matlab/Simulink仿真環(huán)境下,對改進(jìn)型無傳感器高速段控制效果進(jìn)行驗(yàn)證。
2 滑模觀測器設(shè)計(jì)
IPMSM在α-β坐標(biāo)系下的電壓方程為
uα和uβ是電壓分量,iα和iβ是電流分量,Ls是定子電感,eα和eβ是反電動勢分量。
式(1)中反電動勢表示為

ψf為定子磁鏈信息,ω為電角速度信息,θ為轉(zhuǎn)子位置信息。
在極短的時間內(nèi),可以忽略電機(jī)的轉(zhuǎn)速變化即:

則式(2)可以表示為
將式(1)變換為

滑模觀測器方程為
和是電 流 估計(jì)值是電流實(shí)際值和估計(jì)值的差。
電流實(shí)際值和估計(jì)值之間差值的控制方程表示為
將式(6)與式(5)作差,得到電流的誤差方程以及構(gòu)造的滑模面為
將式(10)帶入式(8)可得:
可以看出電機(jī)的反電動勢信息在高頻的開關(guān)信息中。使用低通濾波器進(jìn)行濾波便可得到真實(shí)的反電動勢。
式(12)中ωc是濾波器的截止頻率,為了提高濾波效果,本文設(shè)計(jì)一種截止頻率隨轉(zhuǎn)速變化而變化的更高性能的變低通濾波器來濾波,變截止頻率的設(shè)計(jì)如式(13)所示。

式中k1、k2均是正數(shù),為了使系統(tǒng)在零低速下不會由于截止頻率較大影響系統(tǒng)性能,k2須設(shè)計(jì)為一個較小正數(shù)。
根據(jù)得到的反電動勢估算信息,來計(jì)算轉(zhuǎn)子位置信息如式(14)。
那么,轉(zhuǎn)子的速度信息可表示為

由于在系統(tǒng)中加入了低通濾波器,所以會給帶來系統(tǒng)滯后,為了對系統(tǒng)的滯后進(jìn)行補(bǔ)償,根據(jù)實(shí)時轉(zhuǎn)速進(jìn)行相位補(bǔ)償,如式(16)所示。

在系統(tǒng)中引入非線性函數(shù)會影響系統(tǒng)性能,故切換函數(shù)改進(jìn)為雙曲正切型變飽和函數(shù):
綜上所述,改進(jìn)型基于雙曲正切型變飽和函數(shù)滑模觀測器可設(shè)計(jì)為
3 仿真
3.1 電機(jī)數(shù)據(jù)與系統(tǒng)框圖
由SVPWM計(jì)算模塊和滑膜估算模塊構(gòu)成了帶參數(shù)辨識的無位置傳感器系統(tǒng)仿真模型,通過Matlab軟件構(gòu)建出基于滑膜估算的系統(tǒng)模塊如圖2并未考慮,分析稍顯片面,仍需改進(jìn)。所示,仿真中的電機(jī)參數(shù)具體數(shù)據(jù)如表1所示,無傳感器高速控制系統(tǒng)框圖如圖1所示。
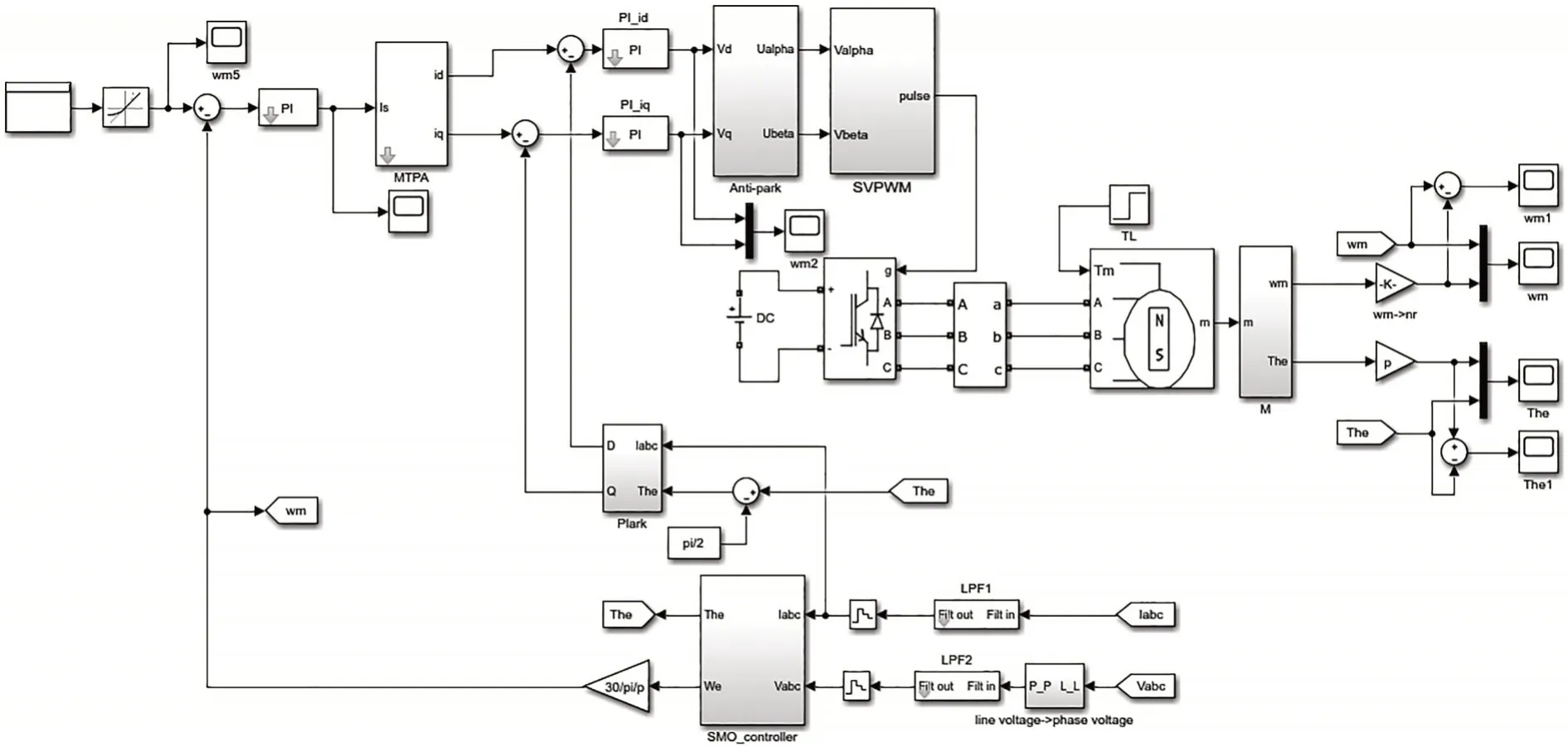
圖2 系統(tǒng)仿真圖
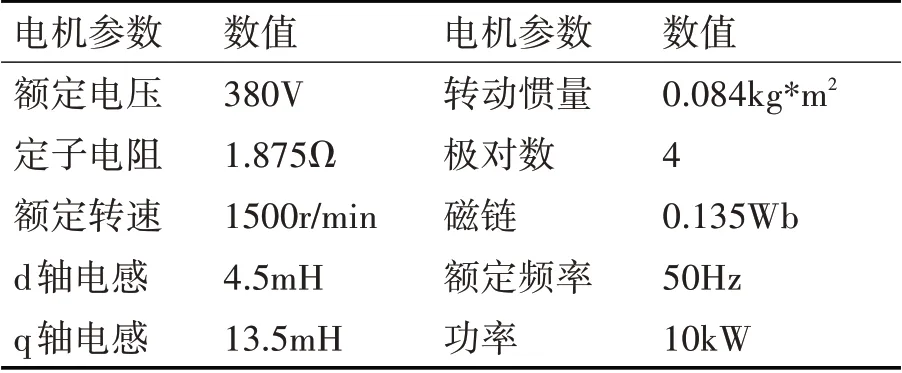
表1 實(shí)驗(yàn)電機(jī)參數(shù)
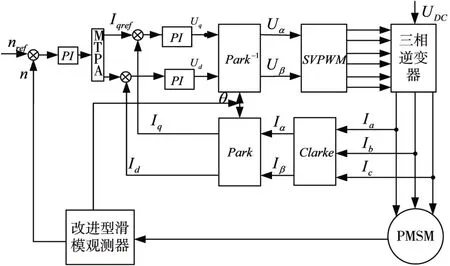
圖1 PMSM無傳感器高速控制系統(tǒng)框圖
3.2 仿真分析
圖3是電機(jī)轉(zhuǎn)速的估算值與實(shí)際值的變化曲線,從圖中可以看出,估算曲線與實(shí)際曲線偏差幾乎沒有,由此可得滑膜控制算法能夠很好地估計(jì)電機(jī)轉(zhuǎn)速。圖4為轉(zhuǎn)速估算誤差變化曲線,估計(jì)誤差在0值附近達(dá)到穩(wěn)定,波動極小,說明算法估算誤差很小,波動調(diào)節(jié)速度較快,系統(tǒng)穩(wěn)定性高。圖5為轉(zhuǎn)子位置實(shí)際值與估算值的變化曲線,估算曲線與實(shí)際曲線偏差幾乎沒有,擬合情況非常好;圖6是轉(zhuǎn)子位置估算誤差變化曲線,估計(jì)誤差在0值附近達(dá)到穩(wěn)定,波動很小,滿足系統(tǒng)的穩(wěn)定性要求。
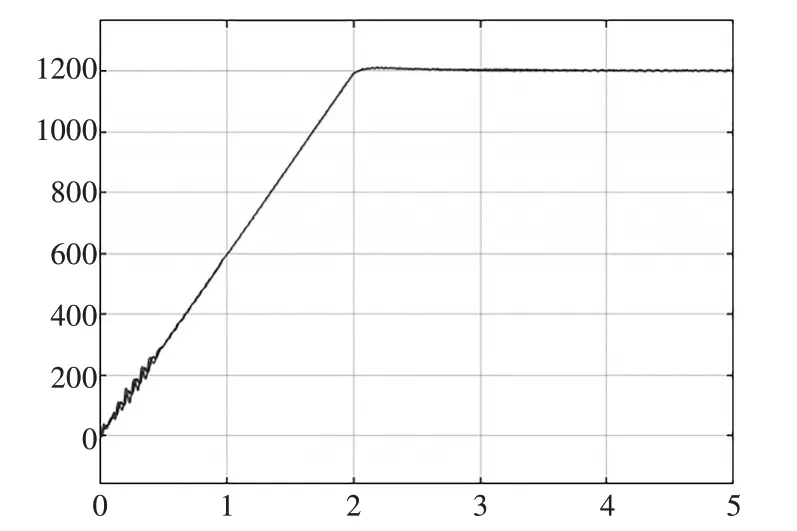
圖3 實(shí)際值與轉(zhuǎn)速估算值變化曲線
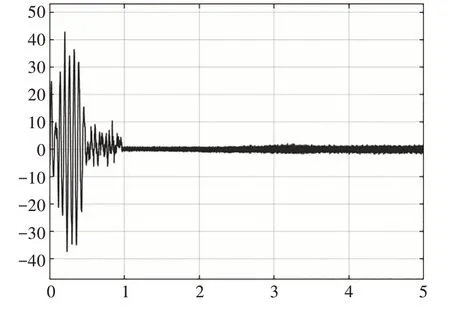
圖4 轉(zhuǎn)速估算誤差變化曲線圖
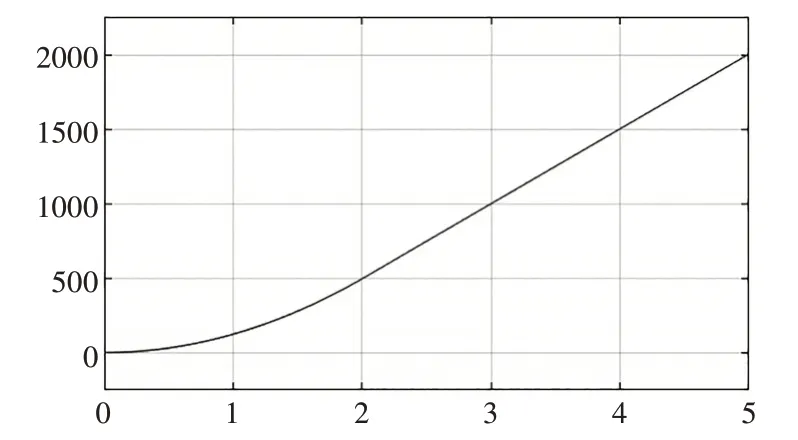
圖5 轉(zhuǎn)子位置實(shí)際值與估算值的變化曲線
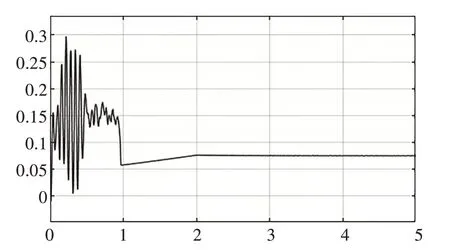
圖6 轉(zhuǎn)子位置估算誤差變化曲線
4 結(jié)語
本文對滑膜觀測器的設(shè)計(jì)進(jìn)行簡單介紹,并進(jìn)行相應(yīng)的數(shù)學(xué)公式推導(dǎo),最后結(jié)合仿真實(shí)驗(yàn)結(jié)果分析得出以下結(jié)論:
1)采用改進(jìn)型滑膜觀測器法可以在電機(jī)中高速運(yùn)行時對轉(zhuǎn)子的位置及轉(zhuǎn)速準(zhǔn)確跟蹤。
2)本文仍然存在不足,如針對低速段的觀測計(jì)
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
