列車控制單元宕機引起地鐵車輛溜車的故障分析及優化
2023-01-04 11:58:58陳卓群
鐵道機車車輛 2022年6期
陳卓群
(廣州地鐵集團有限公司運營事業總部,廣州 511495)
為了保證地鐵車輛安全運營,地鐵車輛的制動系統通常設有常用制動、緊急制動、保持制動等制動功能。常用制動采用電空復合控制方式,優先使用電制動,若電制動力不足則由空氣制動補充。緊急制動優先于常用制動,具有故障導向安全功能,根據緊急安全回路的高低電平狀態分別緩解和施加純空氣制動,緊急制動可以由下列條件觸發:車輛后溜故障、蘑菇按鈕、列車超速、ATP系統等。保持制動采用一個固定制動力值,在車輛停車前的低速運行中空氣制動將代替電制動實施保持制動,它可避免車輛在坡道上停車和啟動時因溜車引發安全事故[1]。
某地鐵車輛設置有保持制動及車輛后溜故障由VCM觸發緊急制動功能。該車輛保持制動力為最大常用制動力的70%,確保車輛在AW3載荷下也能在線路最大坡道上停穩和啟動不溜車。車輛由制動系統根據列車綜合速度及制動系統速度施加保持制動力,VCM根據車輛整車牽引力、列車速度緩解保持制動力。車輛后溜故障由牽引系統進行邏輯判斷,VCM根據收到的車輛后溜故障信息觸發車輛緊急制動功能。為避免車輛后溜問題,該車輛已設置保持制動功能與后溜故障觸發緊急制動功能,但運營3年后卻出現一起因VCM宕機導致的車輛后溜故障。
經調查分析,該車輛原先設計的保持制動施加及車輛后溜故障觸發緊急制動功能具有一定缺陷,導致車輛在VCM宕機情況下出現后溜。
1 故障經過及現象
1.1 故障現象
某地鐵列車以ATO模式駕駛,進站過程中車輛HMI(人機交換界面)出現黑屏現象,列車在自動停車后出現后溜,司機通過操作快速制動使列車停穩。
通過回放列車監控視頻,發現列車后溜時:
(1)列車自出現HMI黑屏后至自動停車,氣制動施加燈不亮。
(2)列車在自動停車后制動氣壓表制動壓力為0,制動處于緩解狀態。
(3)自HMI出現黑屏至車輛溜車前,司機未進行任何操作。
1.2 故障履歷數據
檢查車輛故障履歷數據如圖1所示,發現車輛HMI黑屏時整車所有子系統與A1車VCM(主用)均出現通信故障,可以判斷此時A1車VCM通信異常。

圖1 通信故障履歷
2 車輛溜車保護設計
2.1 保持制動設計邏輯
保持制動是為防止車輛在停車前的沖動,使車輛平穩停車,由制動控制系統執行內部設定的程序。制動系統施加保持制動具有4個條件,當且僅當4個條件全部滿足,列車才允許施加保持制動,如圖2所示。

圖2 保持制動控制邏輯
(1)本軸速度小于0.5 km/h;
(2)TCMS綜合速度速度小于10 km/h;
(3)本CAN網段拖車第一個轉向架最大軸速度小于10 km/h;
(4)本架制動系統最大軸速度小于5 km/h。
若車輛滿足制動系統施加保持制動條件,保持制動施加邏輯如下:在VCM生命信號有效時,當網絡牽引指令無效則制動系統施加保持制動;在VCM生命信號無效時,當硬線牽引指令無效則制動系統施加保持制動。
2.2 車輛在后溜時觸發緊急制動設計邏輯
故障車輛設計具備在后溜時起緊急制動的功能:TCMS根據牽引系統傳輸的車輛后溜故障信息,由VCM輸出接口驅動車輛安全回路掉電,使得車輛產生緊急制動停車。
牽引系統負責判斷車輛后溜故障,如圖3所示。當牽引系統判斷出主控手柄方向和牽引電機的實際方向不一致,只要以下任意1個條件有效則牽引系統觸發后溜故障邏輯:

圖3 后溜故障判斷邏輯
(1)溜車速度大于1 km/h且溜車時間超過0.2 s。
(2)溜車持續時間大于10 s。
(3)溜車距離大于0.4 m。
車輛只要滿足以下任一條件,牽引系統對后溜故障進行復位:
(1)硬線制動指令有效持續5 s及以上。
(2)硬線緊急制動指令持續2 s及以上。
(3)DCU內部出現生命信號故障。
在TCMS正常時,牽引系統將后溜故障狀態反饋至VCM,由VCM觸發車輛后溜導致的緊急制動。TCMS通過VCM實現車輛緊急制動控制功能,TCMS在2個 單元車分 別 配置1個VCM進行 熱備冗余。一單元VCM為主用,二單元備用VCM實時監測主VCM的狀態,當主VCM出現故障或信號干擾時,備用VCM將接管主VCM的職責,行使所有的總線管理和控制功能,VCM的緊急制動硬線接口控制功能如圖4所示。

圖4 VCM緊急制動輸出接口
當TCMS收到牽引系統的后溜故障信息時,主用VCM在經過邏輯計算后,通過接口模塊觸發VCM緊急制動,控制緊急制動繼電器EB上電,EB繼電器常閉觸點隨即斷開,安全回路掉電后控制車輛施加緊急制動。
3 溜車原因分析
3.1 事件記錄儀數據分析
故障時段TCMS事件記錄波形如圖5所示。通過事件記錄波形,復位故障信息如下。在t0~t4時段,VCM生命信號與車輛綜合速度信號均出現卡滯不變故障情況,其中VCM計算得出的綜合速度保持為VCM故障前的64 km/h,對比制動系統軸速與牽引系統電機綜合轉速變化情況可知,車輛實際處于減速過程,可以以此判斷該時段VCM宕機,主從VCM切換失敗;t1~t2時段,根據制動軸速為0而所有制動緩解信號高電平可知,車輛在VCM癱瘓情況下停車且未施加氣制動;t2~t3時段8 s內,車輛在牽引指令低電平及制動指令高電平、所有制動緩解信號高電平即氣制動未施加情況下出現溜車,溜車速度約0.2 km/h,后溜距離約0.4 m,期間牽引系統檢測到后溜,后溜故障在牽引系統受到制動指令持續5 s后復位;t3時刻,司機在發現車輛溜車后,通過操作主控手柄施加快速制動停車;t4時刻,VCM生命信號恢復跳變,TCMS系統恢復正常。

圖5 故障波形圖
3.2 溜車原因
針對VCM宕機、主從2個VCM切換失敗問題,組織供應商技術人員進行現場調查,發現宕機原因為故障時PIDS交換機出現網絡風暴,PIDS交換機通過接口同時向主從2個VCM發送了大量數據,VCM均在超負荷工作下出現宕機。在VCM宕機時,車輛存在2個問題,分別是車輛在故障時未施加保持制動、后溜故障時VCM未主動施加緊急制動。
車輛在故障時未施加保持制動。根據保持制動設計邏輯,制動系統施加保持制動的充分條件之一是VCM計算得出的列車TCMS綜合速度小于10 km/h。網絡模式下本地速度傳感器故障,會導致車輛在運行中制動系統錯誤施加保持制動,造成帶閘跑車的風險。因此,在保持制動施加邏輯中,需考慮列車綜合速度。在t0~t4的故障時段,因VCM宕機導致列車綜合速度保持為故障前的64 km/h。制動系統收到錯誤的列車綜合速度,該異常速度超過10 km/h,不滿足制動系統施加保持制動的條件,因此車輛未能施加保持制動。
車輛在后溜故障時VCM未主動施加緊急制動。根據車輛在后溜時觸發緊急制動設計邏輯,當溜車距離大于0.4 m且無后溜故障復位信號時,牽引系統發出后溜故障信息,VCM根據后溜故障驅動EB緊急制動繼電器上電,從而控制車輛安全回路斷電。t2~t3時段,在車輛溜車時,牽引系統檢測到后溜故障,TCMS也收到該故障反饋。故障時VCM宕機,不進行邏輯計算,未能驅動EB緊急制動繼電器上電,安全回路保持上電狀態,故車輛未能通過VCM施加緊急制動,不符合“故障導向安全”原則。
4 解決措施
由于VCM宕機風險無法杜絕,為徹底避免車輛在VCM宕機后出現保持制動無法施加或車輛檢測到后溜時無法施加緊急制動的情況,必須對VCM宕機后制動系統保持制動施加邏輯及VCM緊急制動邏輯加以完善,同時還需對司機故障處理指南進行優化。
4.1 制動系統保持制動施加邏輯優化
在制動系統軟件中修正網絡故障后,未清除無效的列車綜合速度的問題。當VCM生命信號有效時,制動系統將原來的4個條件作為施加保持制動的前提。當VCM生命信號無效以后,制動系統取消將VCM計算得出的列車綜合速度作為保持制動施加的前提條件之一,只保留以下3個條件作為保持制動施加的充分條件:
(1)本軸速度小于0.5 km/h;
(2)本架制動系統最大軸速度小于5 km/h;
(3)本CAN網段拖車第一個轉向架最大軸速度小于10 km/h。
4.2 車輛在VCM宕機時導向安全
接口電路將緊急制動繼電器EB串入安全回路的常閉觸點替換為常開觸點。在VCM正常且VCM未觸發緊急制動條件時,VCM驅動EB繼電器上電,EB繼電器的常開觸點閉合,安全回路上電,車輛緩解緊急制動。在VCM異常宕機時,由于VCM不進行邏輯計算,未能驅動EB繼電器上電,EB繼電器的常開觸點斷電,安全回路掉電,車輛施加緊急制動,符合“故障導向安全”原則,如圖6所示。
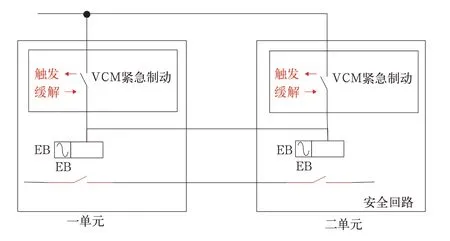
圖6 優化后VCM緊急制動輸出接口
4.3 其他措施
為了規范VCM宕機故障下司機操作,可編制司機操作指引,并要求司機在HMI黑屏等故障現象下通過操作快速制動控制列車停車,將車輛駕駛模式切換至緊急牽引模式。此外,車輛專業技術員應督促PIDS專業針對交換機網絡風暴問題,制定交換機端口帶寬限制及廣播報文抑制措施,確保車輛與PIDS接口工作狀態穩定。
4.4 優化結果
采用上述優化措施對保持施加邏輯及VCM緊急制動邏輯進行優化后,列車在運行過程中,通過斷開主用及備用VCM電源以模擬VCM宕機,車輛立即施加緊急制動直至停車,當列車停穩后,制動系統仍能有效施加氣制動。以上驗證結果表明,上述優化措施可杜絕整車VCM宕機后的溜車問題。
5 結論
分析某地鐵車輛在VCM宕機后出現后溜的故障原因,得出該車輛制動系統在故障下仍將VCM綜合速度作為保持制動施加的條件之一,導致車輛無法施加保持制動。此外,在牽引系統檢測到車輛后溜時,車輛原設計的由VCM觸發后溜故障導致的緊急制動失效,不符合故障導向安全原則。針對以上缺陷,分別對制動系統保持制動施加邏輯、車輛在VCM宕機后緊急制動導向安全進行優化,以上措施可有效防止車輛在VCM宕機后出現的溜車風險。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25