冗余機械手的靈活性優(yōu)化及避障預(yù)警系統(tǒng)
2022-12-30 04:23:56馬文靜朱海榮胡志剛張彤曉
機械設(shè)計與制造 2022年12期
馬文靜,朱海榮,胡志剛,張彤曉
(1.江蘇工程職業(yè)技術(shù)學(xué)院機電工程學(xué)院,江蘇 南通 226007;2.中國礦業(yè)大學(xué)信息與控制工程學(xué)院,江蘇 徐州 221008)
1 引言
當(dāng)前,冗余機械手最重要的應(yīng)用領(lǐng)域是制造業(yè),主要包括焊接、噴涂、裝配、搬運、檢測、機械磨拋加工等需要機械手末端與操作對象物直接接觸的操作。這些操作對機械手末端的位置以及速度的控制要求非常嚴(yán)格,即對路徑追蹤的精確性要求非常高;操作對象物的體積往往比較龐大,被操作面的形狀較為復(fù)雜。在這個操作過程中,為了躲避障礙物,對機械手的姿勢變化幅度及變化速度的能力要求非常高。實現(xiàn)路徑追蹤和避障雙重任務(wù)已成為研究冗余機械手的基本核心問題。圍繞以上問題提出的控制方案,可分為兩大類:離線控制和在線控制。離線控制是機械手執(zhí)行任務(wù)前,對操作對象物及周圍環(huán)境進(jìn)行全面觀測,將這些信息反饋給冗余機械手,然后根據(jù)不同的目標(biāo)任務(wù)和不同的最優(yōu)化要求,通過各種不同的算法,利用冗余度從多種可行性中選擇出唯一的最優(yōu)方案來控制機械手的形狀變化,使機械手末端完成操作任務(wù)。文獻(xiàn)[1]提出了冗余機械手姿態(tài)和運動規(guī)劃的力場方法—任務(wù)空間分離原理;文獻(xiàn)[2]提出了反饋附加避障方法用于冗余機械手的運動規(guī)劃。文獻(xiàn)[1?2]涉及方法的前提是操作對象物體及周圍環(huán)境是靜態(tài)的,被用于時不變環(huán)境下的運動∕路徑規(guī)劃。一旦最優(yōu)規(guī)劃方案被確定下來,機械手可以毫無顧忌地去執(zhí)行給定的任務(wù)。但是離線控制計算量大,工業(yè)成本消耗大,并且,隨著機械手關(guān)節(jié)個數(shù)的增加,計算量將呈現(xiàn)指數(shù)倍的增長。
在線控制使冗余機械手能夠在時變環(huán)境(未知的操作對象物以及動態(tài)的障礙物分布)下工作。文獻(xiàn)[3]論述了冗余機械手的路徑跟蹤與避障在線系統(tǒng);文獻(xiàn)[4]利用模糊綜合評價方法對機械手進(jìn)行在線碰撞檢測。
文獻(xiàn)[3?4]實現(xiàn)了在線操作,但在線狀況下檢測到的操作對象物及其周圍環(huán)境信息都是相對局限的,它無法提前判斷整個操作任務(wù)是否能夠被順利完成,它是在摸索中執(zhí)行任務(wù),潛伏著隨時和障礙物發(fā)生碰撞的危險性。
另外,由于反饋給機械手的是瞬態(tài)的操作對象物及其周圍環(huán)境的信息,僅僅通過這些有限的信息,機械手無法了解到更多的未來信息,因此機械手在執(zhí)行在線操作的過程中經(jīng)常會中途無奈地選擇放棄本可以順利完成的任務(wù),這是對冗余機械手采取在線控制策略時所共同面臨的一個固有難題。
在機械手的運動學(xué)研究方面,文獻(xiàn)[5]早在20世紀(jì)80年代就提出了可操作性橢圓的概念,用來評估機械手的各中間關(guān)節(jié)所產(chǎn)生速度的能力;文獻(xiàn)[6]提出了對雙重機械手進(jìn)行雙重可操作性評估的方案;文獻(xiàn)[7]提出了對多重機械手系統(tǒng)的全域任務(wù)空間的可操作性評估方案;文獻(xiàn)[8]提出了對多重機械手的可操作性及可移動性的評估方案。以上文獻(xiàn)都沒有考慮到機械手姿勢靈活性程度的問題,最優(yōu)的靈活性是實現(xiàn)姿勢變化可行性的前提,也是順利完成在線操作任務(wù)的保證。
受可操作性橢圓[5]理論的啟發(fā),提出了新的理論概念—“靈活性橢圓”用以評估機械手的靈活性,即是評估機械手是否具備大幅度且快速變換姿勢的能力。
從運動學(xué)入手,在同時滿足機械手末端路徑追蹤、中間各關(guān)節(jié)避障這兩個基本任務(wù)要求的基礎(chǔ)上,利用冗余度找出最靈活的機械手姿勢,任務(wù)全程始終保持最靈活的姿勢,隨時應(yīng)對下一時刻突變的環(huán)境。
這個思想的提出能夠滿足一切在線控制的要求,它將使機械手在線執(zhí)行任務(wù)時具備“時刻警惕、隨時應(yīng)變”的能力。另外,為了進(jìn)一步確保操作安全性,采取了探索控制結(jié)合避障預(yù)警的策略,探索控制即是在實際機械手的前方設(shè)計了一個假想機械手,假想機械手代替實際機械手冒險探路,身處其后的實際機械手跟隨假想機械手的運動軌跡。避障預(yù)警即是一旦假想機械手探索到了碰撞風(fēng)險,立即反饋給身后的實際機械手令其停止操作。
2 靈活性橢圓
給定機械手末端的路徑追蹤任務(wù),即給定運動路徑rnd及速度r?nd,r?nd表示如下:

以圖1為例,二維平面內(nèi)(m=2),七關(guān)節(jié)機械手(n=7),最末端按規(guī)定速度完成規(guī)定的路徑追蹤任務(wù),一旦某個關(guān)節(jié)連桿與障礙物的距離在安全界限以內(nèi),則令其停止。路徑及運動前的初始姿勢,如圖1(a)所示。
此刻第1個和第6個關(guān)節(jié)連桿末端的靈活度方向僅存唯一的方向,分別垂直于第1個和第7個連桿,第(2~5)個關(guān)節(jié)連桿末端的靈活度施展范圍不受基座和最末端任務(wù)的約束,依然可以在整個二維平面內(nèi)活動。因此,第1個和第6個關(guān)節(jié)連桿末端的靈活性為直線所表示,直線是二維橢圓面退化成一維的表現(xiàn),即為上文定義的“部分靈活性橢圓”;第(2~5)個關(guān)節(jié)連桿末端的靈活性為橢圓面所表示,為“完全靈活性橢圓”。運動過程中,最先接近障礙物也就是最先被停止的是第1個關(guān)節(jié)連桿末端,第1個關(guān)節(jié)連桿末端停止意味著其靈活度被使用完畢,這直接導(dǎo)致第2個關(guān)節(jié)連桿末端的靈活性橢圓由二維橢圓面退化成直線,而其余關(guān)節(jié)連桿末端的靈活性依然為二維橢圓面所表示,如圖1(b)所示。
同理,依此類推,機械手末端完成路徑追蹤的過程中,其所有中間關(guān)節(jié)連桿末端的靈活度都被按序使用完畢用以避障,如圖1(c)~圖1(f)所示。
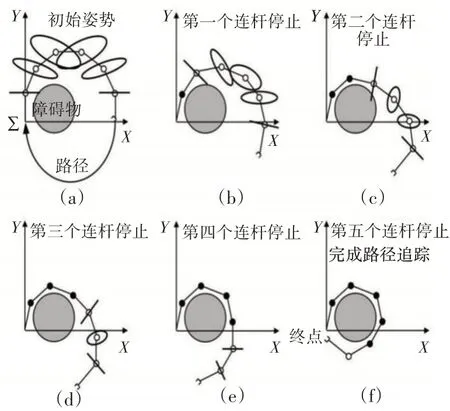
圖1 靈活性橢圓及路徑追蹤案例Fig.1 Flexibility Ellipsoids and the Case of Trajectory Tracking
3 機械手姿勢最優(yōu)化
根據(jù)前文所述內(nèi)容,靈活性橢圓的大小可以作為評估機械手靈活性的依據(jù),機械手第i個關(guān)節(jié)的靈活性橢圓的大小標(biāo)準(zhǔn)定義如下:

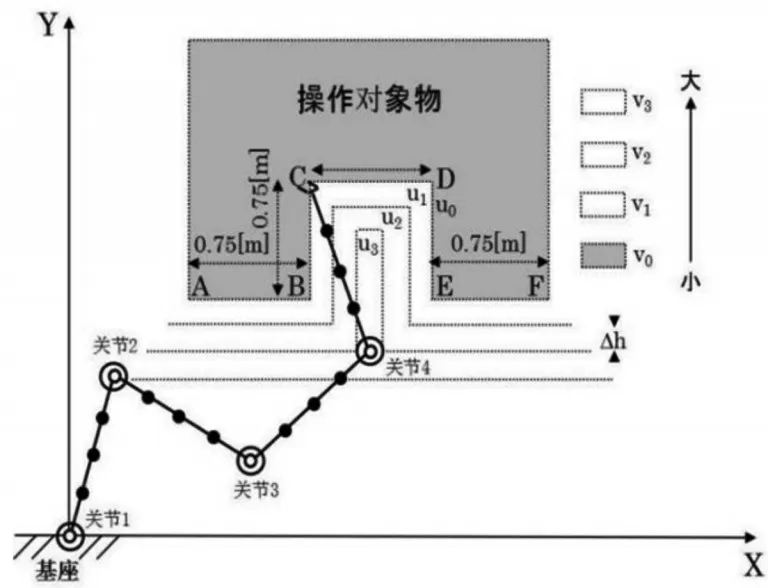
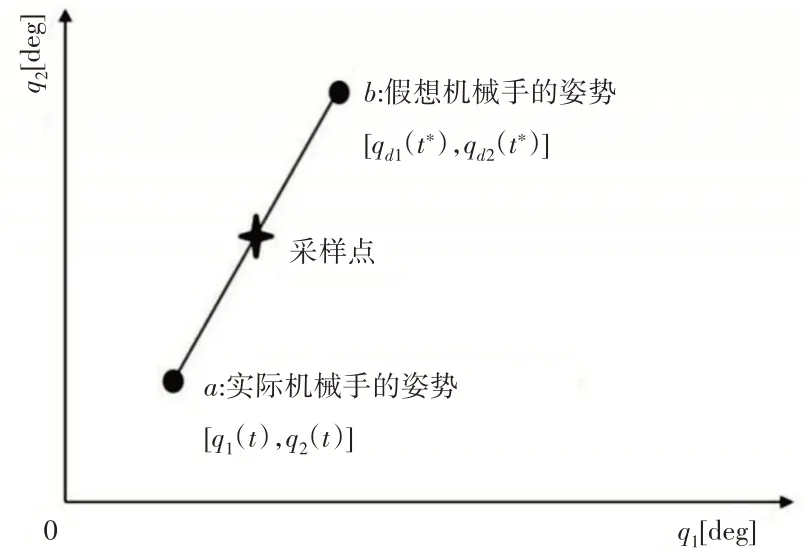
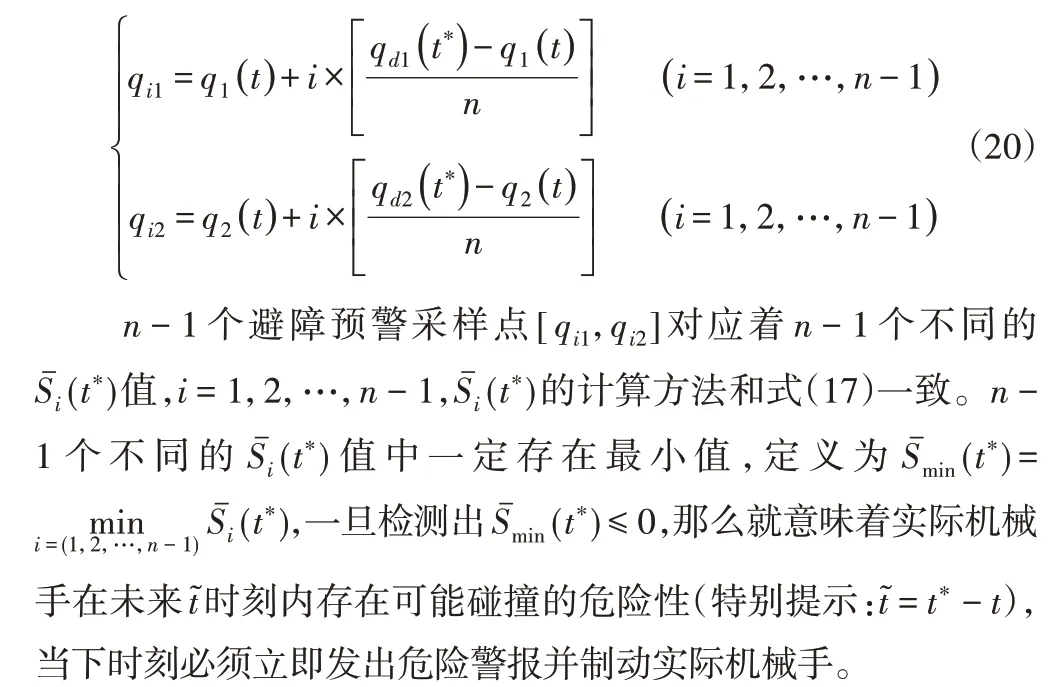
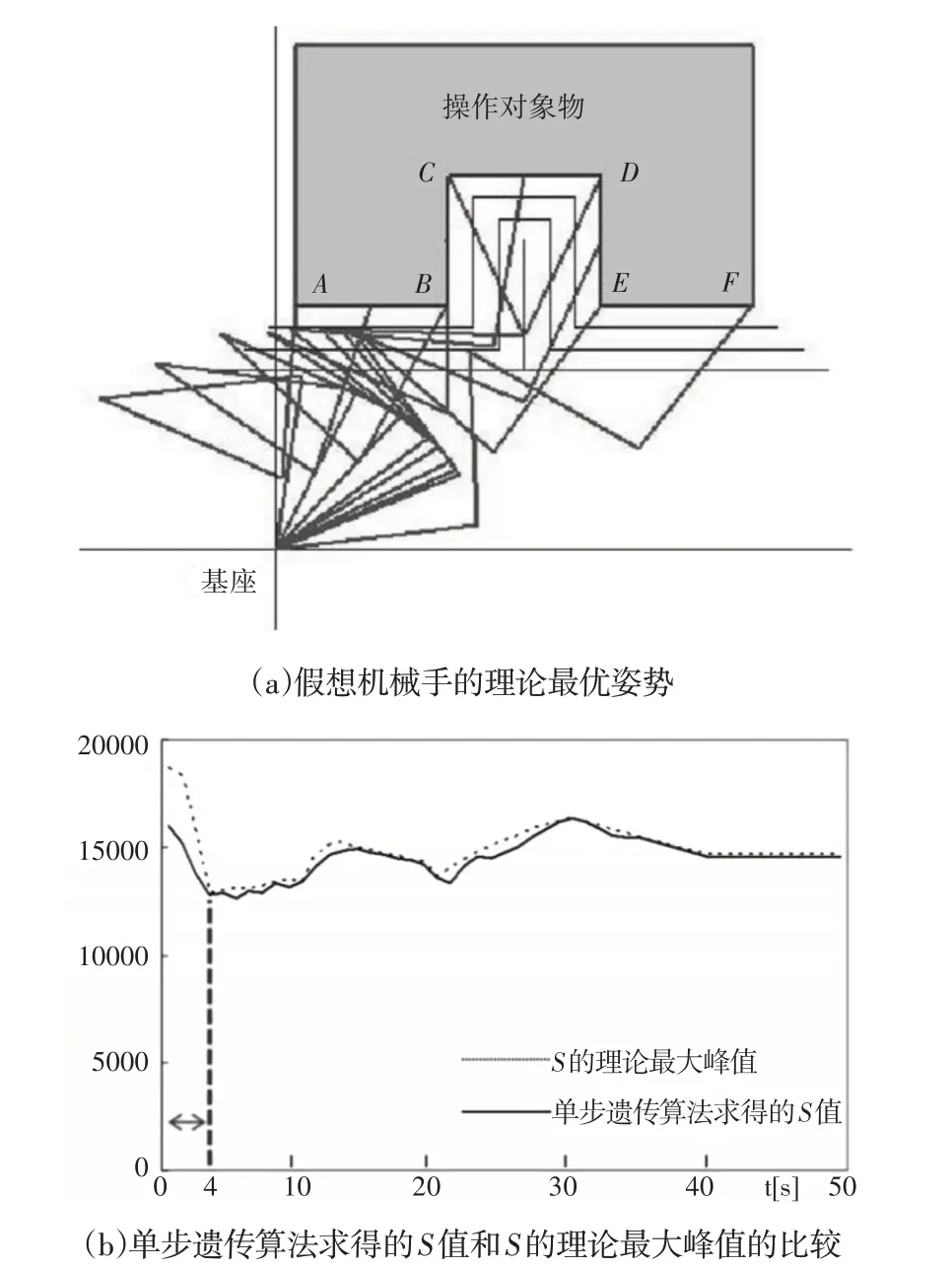
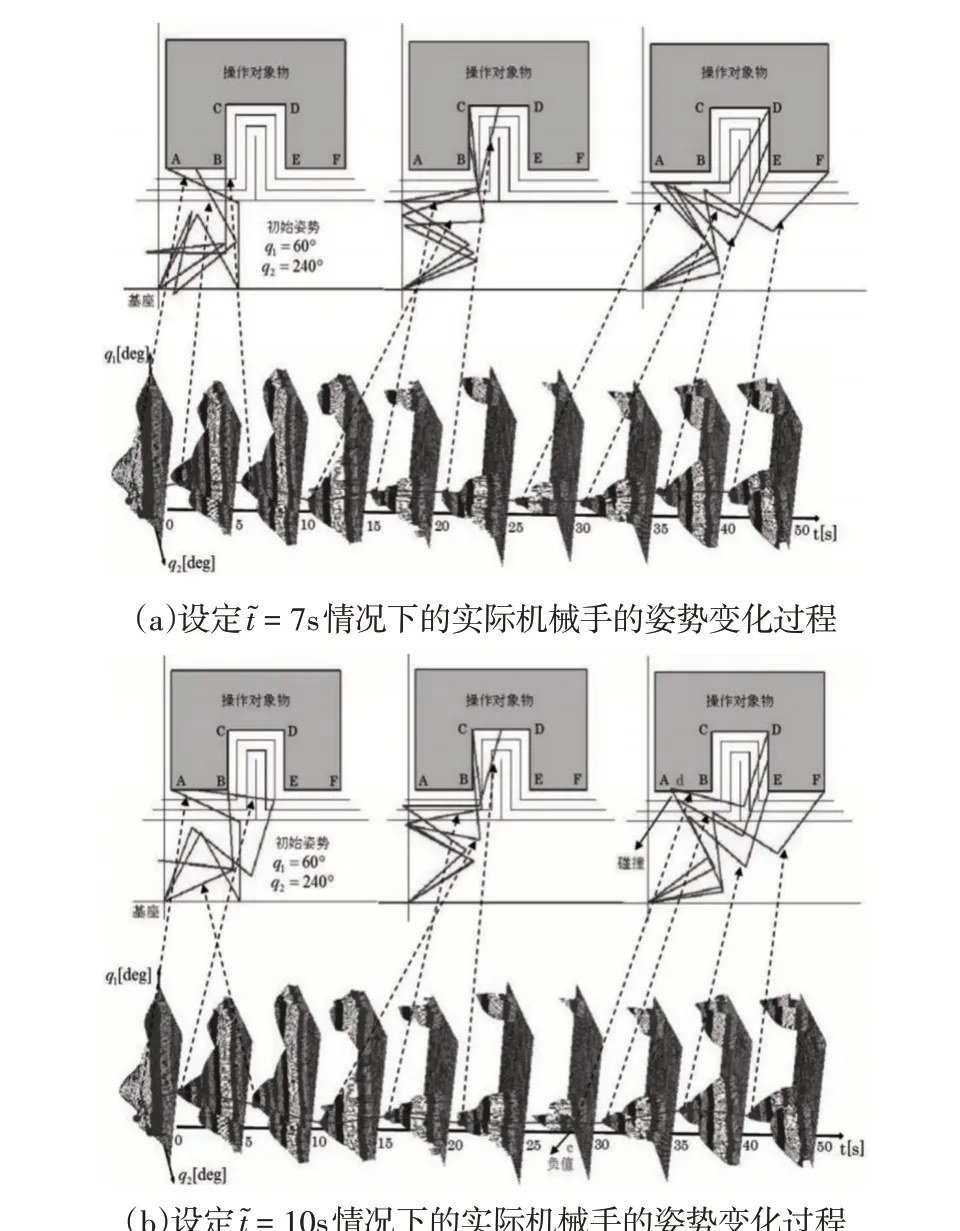
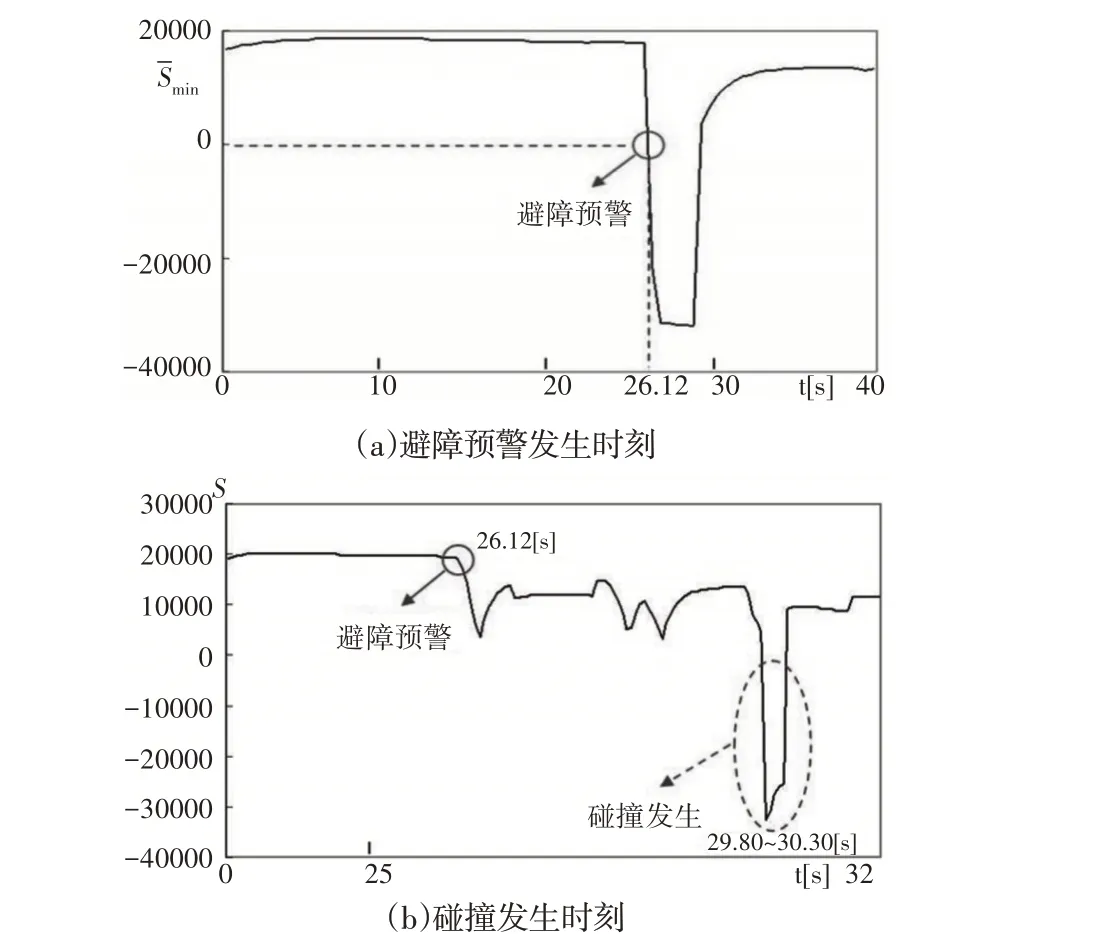
根據(jù)式(16),一旦機械手接近操作對象物,U值將會迅速變小。另外,vk始終為負(fù)值,而操作對象物本體區(qū)域內(nèi)u0的對應(yīng)參數(shù)v0滿足:v0<<0,那么當(dāng)U 圖2 避障方案解析Fig.2 Analysis of Obstacle Avoidance Method 綜上所述,式(17)中S的最大值即對應(yīng)著機械手的最佳姿勢,機械手的姿勢最優(yōu)解應(yīng)當(dāng)首先確保機械手本體和操作對象物之間的安全距離,再盡可能地追求理想的靈活性。 探索控制系統(tǒng)包括測量模塊,規(guī)劃模塊,控制模塊。t表示當(dāng)前時間,超前時間t?=t+t?,t?為超前時間單位。首先,測量模塊中的假想機械手在操作對象物的外圍路徑上確定其末端位置rd(t?),假想機械手僅存在于計算機程序代碼中。然后,規(guī)劃模塊輸出其姿勢最優(yōu)解q?d(t?),它對應(yīng)了式(17)中S的峰值,是利用單步遺傳算法[10]瞬態(tài)求得的。接著,控制模塊輸出理想的關(guān)節(jié)角速度q?(t),計算結(jié)果如下: 式(19)代入式(18)后便構(gòu)成了探索控制系統(tǒng)。t?的理想賦值,受路徑環(huán)境和障礙物分布狀況的影響,同時還受任務(wù)完成總時程的影響,需要經(jīng)過反復(fù)的實驗調(diào)試才能獲取。 解決在線控制系統(tǒng)中的“在線”問題,則要求在極短的時間內(nèi)計算出假想機械手的最優(yōu)姿勢q?d(t?),這個最優(yōu)姿勢q?d(t?)等價對應(yīng)S的峰值。測試結(jié)果表明:使用普通的遺傳算法將會在30代迭代之后得到S的峰值,整個過程將耗時約61ms。然而,攝像機的采集圖像的頻率決定了在33ms內(nèi)必須得到S的峰值才可滿足在線控制的要求。單步遺傳算法可全程實現(xiàn)快速收斂,滿足要求。詳見文獻(xiàn)[10]。 避障預(yù)警控制的核心思想就是將采樣檢測設(shè)備安置在實際機械手和假想機械手之間的位置,始終檢測實際機械手和假想機械手之間時間差t?對應(yīng)的路徑位置差,隨著假想機械手和實際機械手的同步運動,檢測的位置也隨之發(fā)生改變,不變的是檢測工作量始終是t?對應(yīng)的路徑位置差。 避障預(yù)警控制方案,如圖3所示。“a”點是實際機械手當(dāng)前時刻下的姿勢,坐標(biāo)表示為[q1(t),q2(t)],“b”點是在未來時刻的對應(yīng)S峰值的假想機械手的最優(yōu)姿勢,坐標(biāo)表示為[qd1(t?),qd2(t?)]。對“a”和“b”兩點連線,再將“ab”線段進(jìn)行n等份的劃分,那么“a”、“b”兩點之間就會有n?1個點,這些點被稱為預(yù)警采樣點,其坐標(biāo)表示為[qi1,qi2],每一個避障預(yù)警采樣點的姿勢表示如下: 圖3 避障預(yù)警采樣點的分布Fig.3 Distribution of Sampling Points for Obstacle Avoidance Warming 仿真環(huán)境,如圖4(a)所示。二維平面內(nèi)的路徑包括五個部分,分別是A?B、B?C、C?D、D?E和E?F,每段路徑長度是75cm。圍繞操作對象物的外圍尺寸,以Δh=10cm的間隔大小構(gòu)造了三個區(qū)域u1、u2和u3,區(qū)域?qū)?yīng)值分別是v1=?10、v2=?2和v3=?1,操作對象物本體內(nèi)部區(qū)域值設(shè)定為:v0=?10000。“A”點位置坐標(biāo)是(10cm,140cm),機械手的四個連桿長度均相同,長度均為100cm,機械手的末端勻速完成路徑追蹤任務(wù)且不能和操作對象物發(fā)生碰撞,全程仿真時間是50s。 單步遺傳算法是否有效,意味著求得的假想機械手的最優(yōu)姿勢是否理想,這是實際機械手跟隨逼近假想機械手從而完成在線任務(wù)的首要前提。為了驗證單步遺傳算法的效果,針對假想機械手做了仿真實驗,假想機械手在全程50s內(nèi)的十個典型時刻下的離線控制結(jié)果,如圖4(a)所示。離線控制面對的是已知且靜態(tài)的環(huán)境,完全不需要考慮動態(tài)的因素,計算過程不受時間限制,也就是說,實際機械手在開始執(zhí)行任務(wù)之前,計算機程序中的假想機械手已經(jīng)全部掌握了操作對象物的整體形狀和尺寸大小,且對A?F的路徑追蹤任務(wù)進(jìn)行過了完整精確的計算演習(xí),在已經(jīng)確定出了一套理論上最佳路徑規(guī)劃方案后,實際機械手只需機械地按照此規(guī)劃方案執(zhí)行操作即可,這些理論最優(yōu)姿勢全部源自圖4(b)中S的理論最大峰值,為虛線所表示。這種情況下,離線控制得到的S值全程始終都保持理論上的最大峰值,同時對應(yīng)的機械手也全程始終都保持理論上的最優(yōu)姿勢,這一切都是離線控制下對路徑規(guī)劃所產(chǎn)生的必然結(jié)果。單步遺傳算法在線求得的S值在圖4(b)中為實線所表示。實線和虛線比較的結(jié)果顯示:在仿真實驗全程中,兩者最大的差值僅出現(xiàn)在運動起始階段,這是由于人為設(shè)定的初始姿勢造成的,人為設(shè)定的初始姿勢經(jīng)歷了極短的時間便開始向理論最優(yōu)姿勢進(jìn)行調(diào)整,t=4s之后,利用單步遺傳算法在線求得的S值和S的理論最大峰值幾乎完全重合。結(jié)果驗證了單步遺傳算法的有效性,如圖4所示。 圖4 單步遺傳算法的有效性驗證Fig.4 Validation of 1?Step Genetic Algorithm 在驗證過單步遺傳算法的有效性基礎(chǔ)上,接下來再驗證探索控制方案的有效性。通過對探索控制原理的理解,不難想象,相同的任務(wù)環(huán)境下,探索時間t?的設(shè)定不同,實際機械手的運行效果便會有所不同。首先,仿真設(shè)定t?=7s,實際機械手在十個典型時刻下對應(yīng)的S值雖不是理論上的最大峰值,但均在理論最大峰值附近,實際機械手順利完成路徑追蹤任務(wù),且全程無碰撞發(fā)生,如圖5(a)所示。 從而驗證了探索控制方案完成在線操作任務(wù)是可行有效的。接下來,仿真設(shè)定t?=10s,結(jié)果顯示t=30s時刻,S出現(xiàn)負(fù)值現(xiàn)象,標(biāo)記為“c”,相對應(yīng)的機械手與操作對象物發(fā)生了碰撞,碰撞處標(biāo)記為“d”,如圖5(b)所示。導(dǎo)致實際機械手發(fā)生碰撞的原因是:在線控制本身攜帶著很多不確定因素,危險隨處可見、隨時發(fā)生,而t?的最佳設(shè)定值又無法事先準(zhǔn)確預(yù)測。 圖5 t?=7s和t?=10s的實際機械手的姿勢變化過程比較Fig.5 The Comparison of Posture Changing Process of the Actual Manipulator Between t?=7s and t?=10s 因此,將避障預(yù)警控制融入到在線控制策略中顯得十分必要,避障預(yù)警控制可以做到提前檢測到未來發(fā)生碰撞的可能性,及時發(fā)出避障預(yù)警信號并制動實際機械手。 現(xiàn)將避障預(yù)警控制融入到圖5(b)的仿真實驗環(huán)境中(t?=10s)。在t=26.12s時刻,檢測出Sˉmin≤0,如圖6(a)所示。這便意味著實際機械手在未來10s內(nèi)很可能和操作對象物發(fā)生碰撞,此時(t=26.12s)立即發(fā)出危險警報并制動實際機械手。 圖6(b)的結(jié)果證實了如果不采取避障預(yù)警方案,實際機械手必定在t∈(29.8~30.3)s的時刻范圍內(nèi)和操作對象物發(fā)生碰撞。結(jié)果驗證了避障預(yù)警控制方案的有效性,如圖6所示。 圖6 避障預(yù)警控制的有效性驗證Fig.6 Validation of Control for Obstacle Avoidance Warming 冗余機械手在線執(zhí)行路徑追蹤任務(wù)時,一旦面對突變的環(huán)境,要求機械手全程保持最靈活的姿勢。提出的“靈活性橢圓”的理論概念能夠用以準(zhǔn)確評估冗余機械手的靈活性。在此理論基礎(chǔ)之上,又提出了探索控制方案和單步遺傳算法來解決冗余機械手在線路徑追蹤和避障問題。同時,為了進(jìn)一步確保安全操作,增設(shè)了在線避障預(yù)警控制系統(tǒng)。 最終,以二維平面內(nèi)的四關(guān)節(jié)冗余機械手為對象進(jìn)行了仿真實驗,其結(jié)果驗證了以上方案在解決在線控制問題上的有效性。未來的研究計劃中,要逐步提升仿真和實機實驗環(huán)境的復(fù)雜程度,使所涉及的理論算法及控制方法的論證更具說服力。
4 在線控制方案
4.1 探索控制
4.2 單步遺傳算法
5 避障預(yù)警控制
6 仿真實驗結(jié)果及分析
6.1 單步遺傳算法的驗證
6.2 探索控制方案的驗證
6.3 避障預(yù)警控制方案的驗證
7 結(jié)論
