基于等積環形分割的高頻元件快速識別算法
2022-12-30 04:22:58尹可鑫李柏林林冬婷
機械設計與制造 2022年12期
尹可鑫,歐 陽,李柏林,林冬婷
(1.西南交通大學牽引動力國家重點實驗室,四川 成都 610031;2.西南交通大學機械工程學院,四川 成都 610031)
1 引言
高頻元件的智能精密加工工序流程中采用射頻芯片技術,即將高頻元件的加工工藝參數、電性能參數等信息載入射頻芯片中,并與該元件所放置的托盤進行關聯。由于在元件的熱處理階段,元件與托盤脫離導致元件原有的射頻芯片失效,無法完成后續的智能加工所以需要對元件二次匹配識別。傳統的元件識別方法是依靠人工完成,存在檢測速度慢、主觀性強、誤檢率高等缺陷。因此需要在熱處理前后使用圖像識別技術識別工件圖像,完成元件信息的關聯,實現整個加工過程的智能化。
針對圖像識別技術,國內外學者提出了一些相關算法,主要可分為優化特征提取算法及優化特征匹配算法。文獻針對多尺度[1?3]、大仿射、大規模復雜場景等不同的適應條件進行改進,但無法區分具有紋理復雜的工件。文獻[4]提取圖像中各設備的SIFT特征,并與標準庫中的設備圖像進行對比實現目標識別,由于該方法需要手動標注,因此難以應用于大批量的工件生產中。文獻[5]通過計算文獻[6]獲取圖像多個矩的互相關性以確定配準點位置,該方法雖然具有旋轉及尺度不變性,但針對相似度較高的高頻元件,識別能力較弱。此外,擴展的圓投影算法或者改進環投影向量模板匹配算法[7?8]由于使用像素平均值作為評判依據,導致高頻元件的細節特征丟失。
針對上述算法應用于高頻元件圖像識別存在的問題,提出了一種基于等積環形分割特征的圖像識別算法。首先使用滑動窗口的方法根據互信息熵快速定位,再利用等積環形對圖像進行分割,通過計算各個環上的梯度幅值及方向得到匹配系數MRR,由此對不同的高頻元件進行定位及識別。
2 圖像識別算法
以精密加工的高頻工件為研究對象,提出基于等積環形分割特征的圖像識別算法,其整體框架流程,如圖1所示。
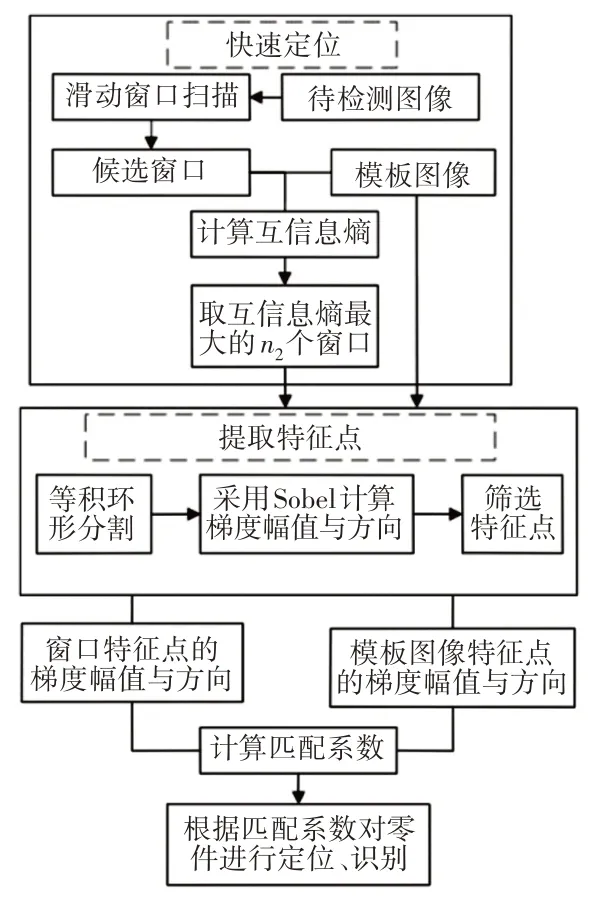
圖1 算法整體框架流程Fig.1 Overall Framework Flow of Algorithm
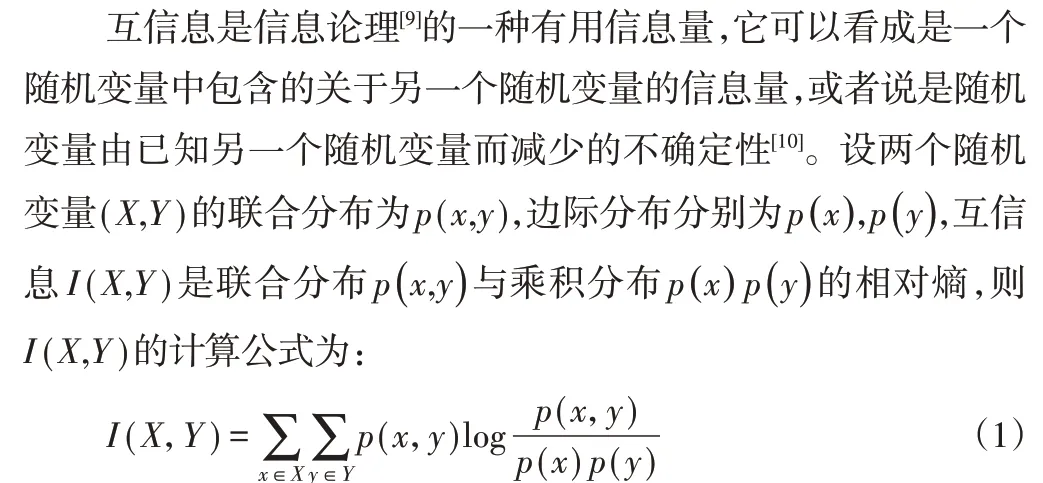
2.1 基于互信息熵的圖像快速定位
由于互信息熵使用的是圖像相關性的統計特征,因此具有旋轉不變性。待檢測圖像與不同模板的定位結果,如圖2所示。
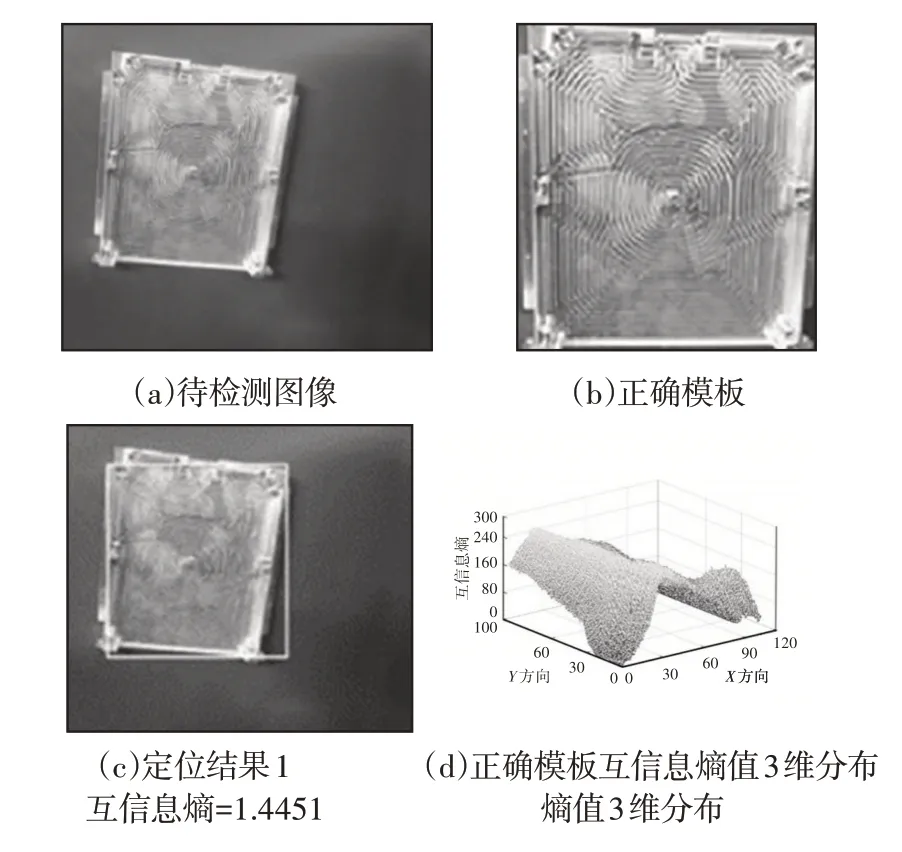
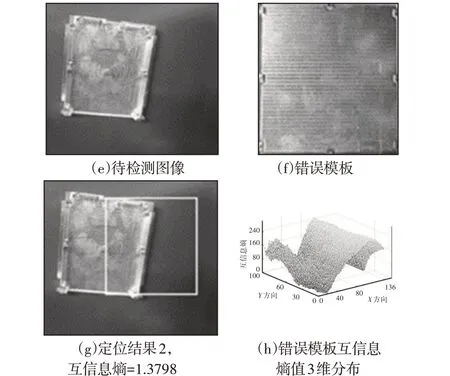
圖2 待檢測圖像與不同模板的定位結果Fig.2 Positioning Results of the Image to be Detected and Different Templates
根據圖2所示,雖然互信息熵法根據圖像本身的灰度值及形狀信息來對其進行定位的準確度較高,對圖像的水平、垂直、旋轉變化的魯棒性較好,但是對于相似度極大的精密加工高頻元件,不能直接通過最大互信息熵I進行區分。因此,互信息熵法只能用于快速定位,在定位后的所有互信息熵點集結果中,選擇互信息熵最大的n2個點作為待檢測角點集。并且根據圖像大小選擇不同數目的待檢測角點n2,其計算方式如下:

其中,cols及rows為圖像的長、寬,得出的n2個滑動窗口的左上角點的點集分布圖,如圖3中黑色區域所示。
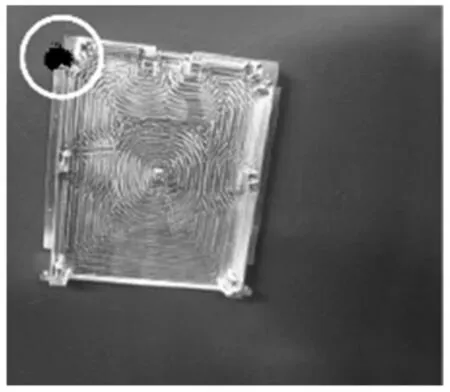
圖3 互信息熵點集分布Fig.3 Distribution of Mutual Information Entropy Point Set
2.2 等積環形圖像分割
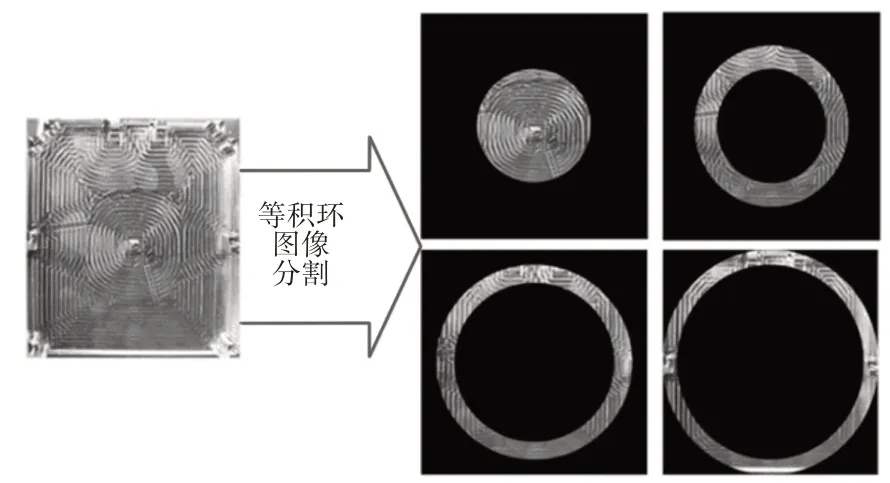
圖4 目標圖像等積環分割結果Fig.4 Segmentation Results of Target Image with Equal Product Ring
2.3 匹配系數MRR的推導
2.3.1 Sobel算子的改進
Sobel算子是考慮了±0°、±90°4個方向的梯度加權求和的3×3各向異性的梯度算子。而待檢測圖像的內部加工紋理較為復雜且相對密集,傳統的Sobel算子只描述了水平、垂直方向的特征并不能很好地描述其斜方向的細節特征,因此增加±45°以及±135°四個方向的卷積核。改進后的Sobel算子卷積核,如圖5所示。卷積效果對比,如圖6所示。可見加上±45°以及±135°卷積核后,對于斜方向的加工紋理表達能力更強,在原4方向卷積效果的基礎上,添加更多有效描述。
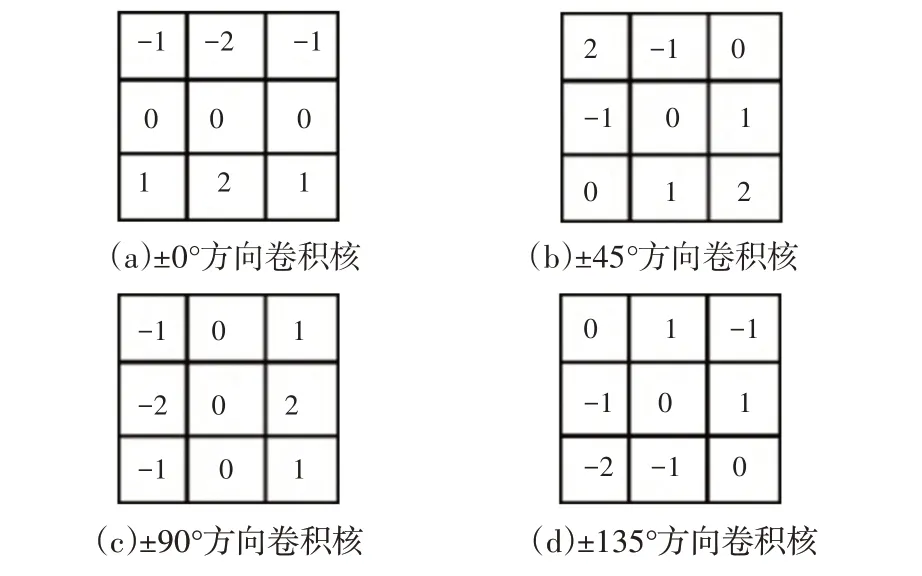
圖5 改進后的Sobel算子8方向卷積核Fig.5 Improved 8?Direction Convolution Kernel of Sobel Operator
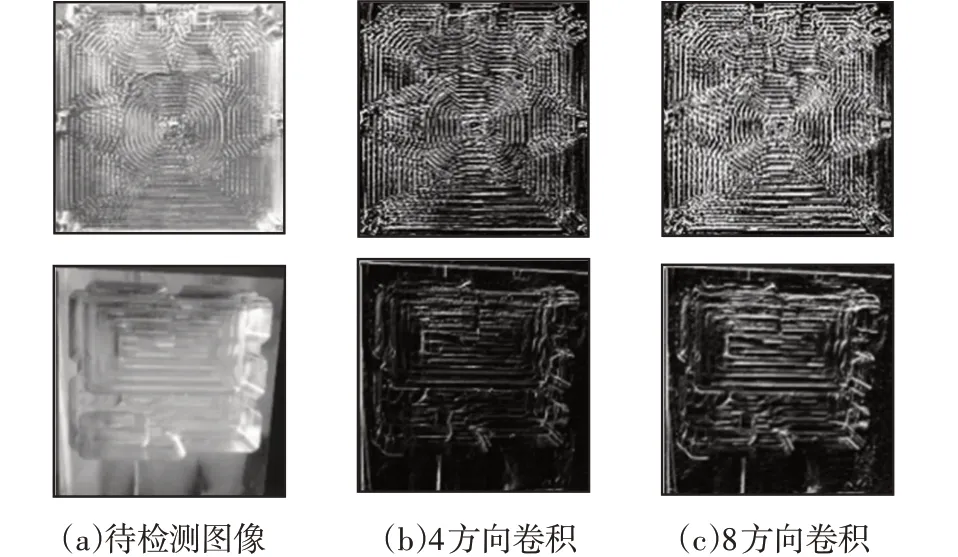
圖6 卷積核卷積結果對比Fig.6 Comparison of Convolution Results of Convolution Kernel
2.3.2 計算等積環的梯度幅值與梯度方向
在各個等積環中使用8方向Sobel算子計算梯度幅值(Pixel Gradient Amplitude,PGA)與梯度方向(Pixel Gradient Direction,PGD)的步驟如下:
(1)計算各方向的梯度幅值。設原圖M為f(x,y),0°方向卷積結果為T0,45°方向卷積結果為T45,90°方向卷積結果為T90,
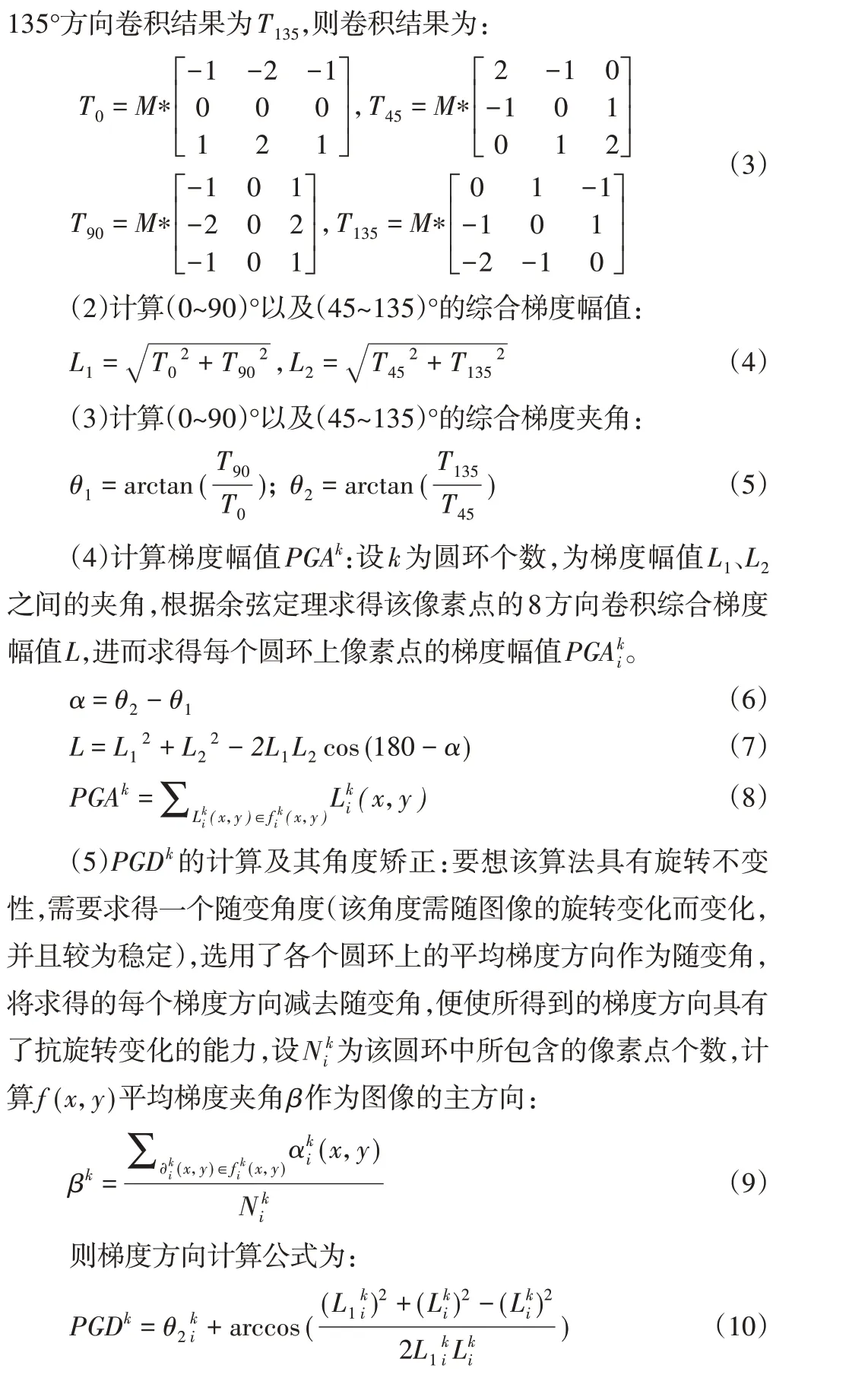
PGA與PGD的整體計算流程,如圖7所示。
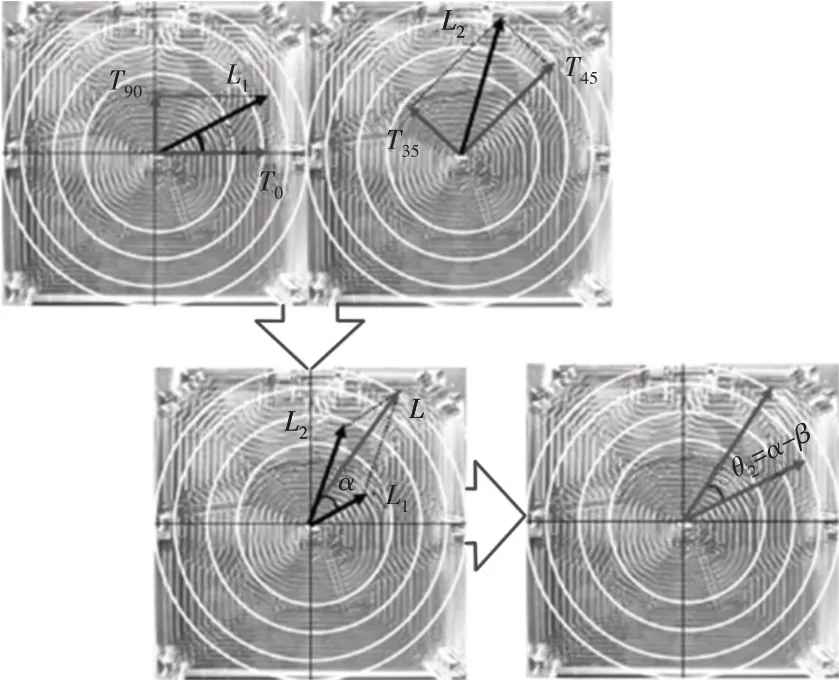
圖7 計算流程Fig.7 Calculation Flow
2.3.3 有效特征點的篩選
將上述所得到的梯度幅值PGA與梯度方向PGD分別進行統計分組,使用預先設置的閾值篩選出符合條件的有效特征。
(1)利用梯度幅值篩選每個圓環中的有效特征點。圖8(b)為圖8(a)的梯度幅值3維分布圖。由于模板是由程序自動分割,在模板的4個邊界不可避免的出現部分背景區域也因此導致了圖8中4邊界區域梯度方向發生畸變,雖再次使用等積環分割,但不能保證分割后的圖像中不出現背景區域,為過濾可能出現的背景區域,需要使用閾值600過濾。在剩余區域,使用數理統計的方法最終確定本次實驗中有效特征點的梯度幅值閾值為400。因此特征點的梯度幅值區間為[400,600]。
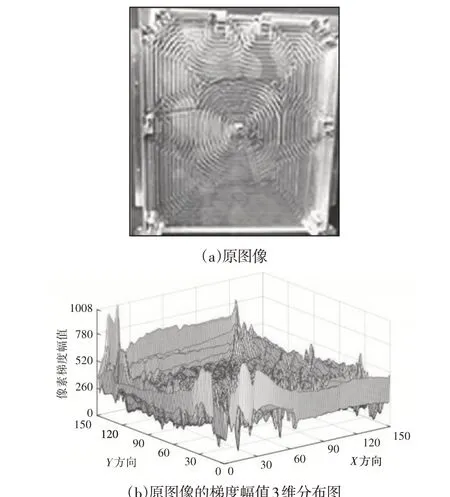
圖8 梯度幅值計算Fig.8 Gradient Amplitude Calculation
(3)利用梯度方向篩選每個圓環中的有效特征點。圖8(a)的梯度方向分布圖,如圖9所示。同樣為過濾可能出現的背景區域,將梯度方向的閾值設為[?80,+80]。根據所得數據進行分析,將有效梯度方向的篩選閾值區間設為[?70,+70]。
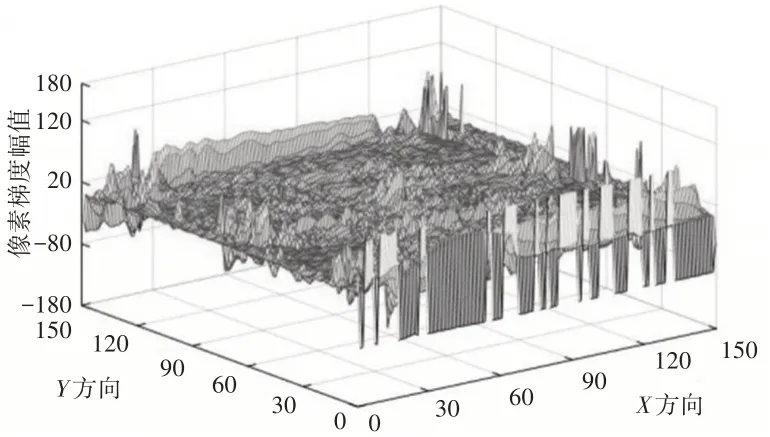
圖9 原圖像的梯度方向3維分布圖Fig.9 Gradient Direction 3 Dimensional Distribution of the Original Image
2.3.4 特征匹配
首先將模板圖像中的n2個圓環的平均梯度幅值與待檢測圖像依次進行歐氏距離的比較,得到梯度幅值的特征匹配度。為比
2.3.5 匹配系數MRR的適應性分析
算法MRR 的參數梯度幅值PGA、梯度方向PGD的分析結果,如圖10、圖11所示。
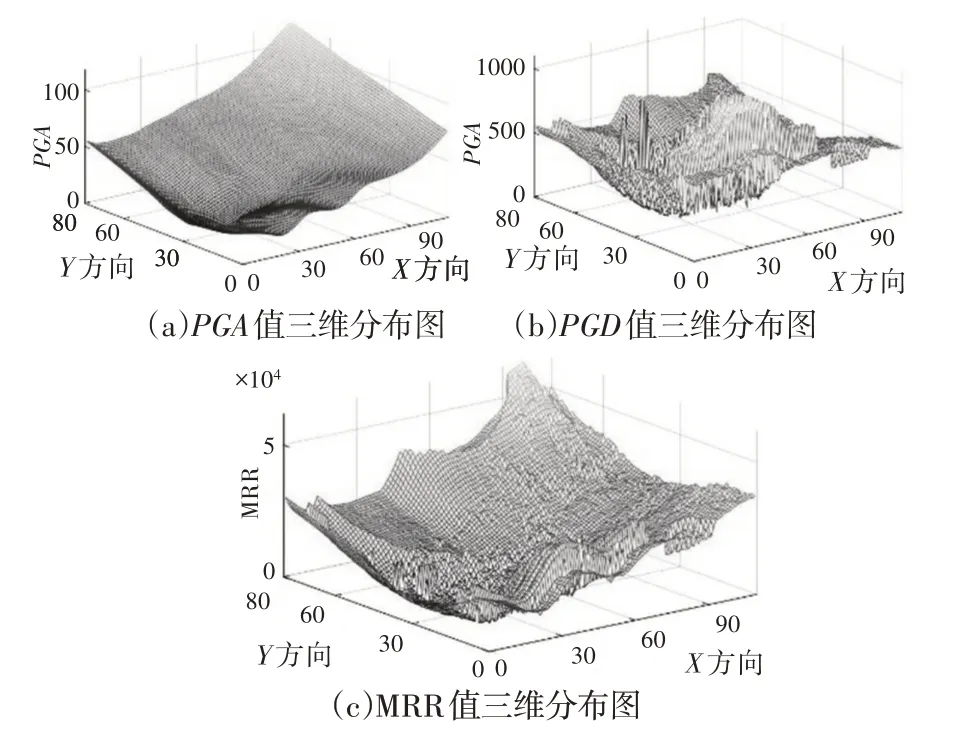
圖10 待檢測圖像與正確模板的參數三維分布圖Fig.10 Three Dimensional Distribution of Parameters Between the Image to be Detected and the Correct Template
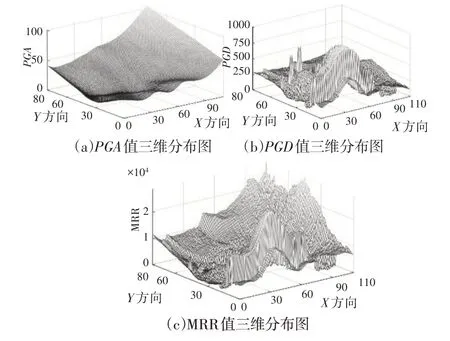
圖11 待檢測圖像與錯誤模板的參數三維分布圖Fig.11 Three Dimensional Distribution of the Parameters of the Image to be Detected and the Error Template
對于PGA匹配,當滑動窗口越接近目標圖像所在位置時其PGA指數越低,說明PGA匹配對于目標的位置信息具有越好的描述作用;對于PGD匹配,在滑動窗口的滑動過程中,PGD指數跳變嚴重,尤其在目標圖像所在區域PGD指數變化最為明顯,因此PGD對于滑動窗口區域的特征描述能力較強,但由于周邊環境對其影響較大,導致其定位能力較弱。根據基于等積環形分割特征的圖像識別算法得出的MRR指數,綜合了梯度幅值與梯度方向各自的優點,在保留了PGA對于圖像定位能力的同時,也加入了PGD對高頻元件細節特征的表達能力,因此可以作為一個對于圖像定位以及識別的重要參數。
3 實驗結果與分析
3.1 實驗配置及數據集
實驗選用的計算機配置為英特爾酷睿I5?6400(2.7GHz)CPU,NVIDIA GeForce GTX 730 GPU,8.00GB 內存,Windows10系統,實驗使用的編譯工具為Matlab 2018。
本次驗證實驗中選擇元件共計30種,每種元件選取5張圖像。為驗證旋轉不變性,我們將各個圖像繞與軸的旋轉角度固定,繞 軸從(0~324)°步長為36°進行旋轉,組成1350張圖像的測試集。對比試驗選用其他4種常用的模板匹配算法,通過實驗將本算法與ARRCH[11]、互信息熵、SIFT、SURF在定位性能、識別性能與時效性上進行比較。
3.2 定位性能對比
為評估各個算法的定位性能,給出一種評估方法用于衡量定位準確度的指標ACC:

式中dM1—目標圖像的中心位置;dM—待檢測模板中準確區域的中心位置;D—目標圖像的對角線長,ACC對比結果,如圖13所示。從圖13中可以看出,提出的算法在定位性能上與同類算法相比有所提升,其ACC值均保持在0.945以上。

圖12 5種算法的ACC對比結果Fig.12 ACC Comparison Results of Five Algorithms
3.3 識別性能對比
使用1350張測試圖像比較SURF、ARRCH、互信息熵、SIFT及本算法的識別性能,將識別的準確率作為識別性能的對比指標結果,如表1所示。根據表1所示的對比結果,本算法對高頻元件的識別準確率達到了95.9%,在識別性能上高于其他4種算法。
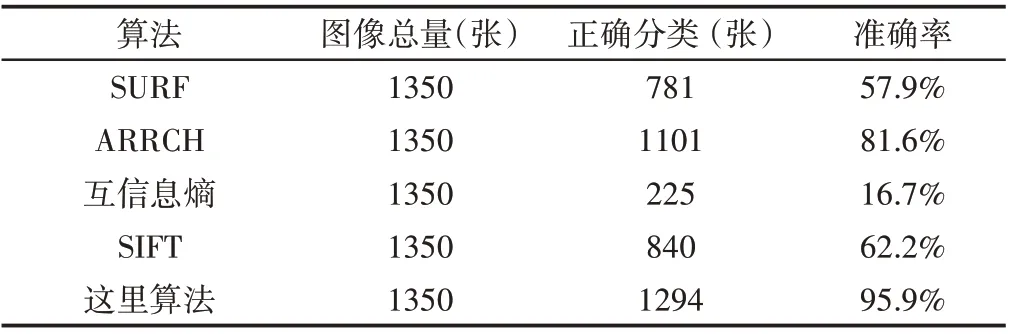
表1 識別性能對比結果Tab.1 Comparison Results of Recognition Performance
3.4 時效性對比
使用1350張測試圖像來比較5種算法的時效性,以每張圖的平均處理時長作為對比指標結果,如表2所示。
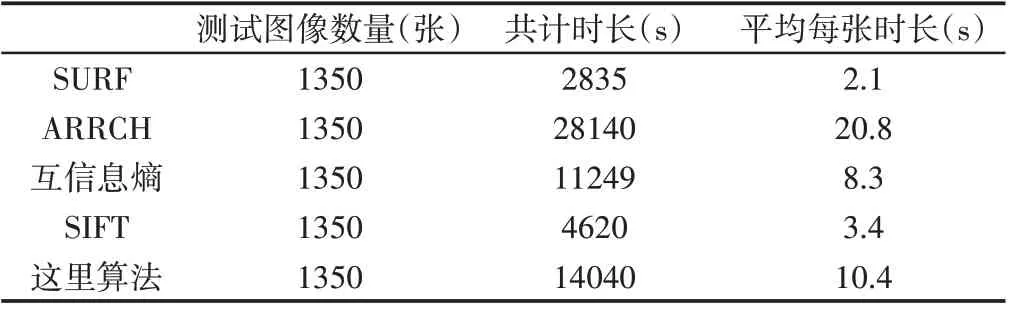
表2 時效性對比結果Tab.2 Time Effect Comparison Results
由于本算法使用了較復雜的計算過程,不可避免的在分析圖像的時間上有所增加。根據表2所示的對比結果,處理每張圖像的平均時長為10.4s。
4 總結
針對高頻元件紋理復雜、相似度高,因而不能用傳統模板匹配技術進行區分及定位的問題,提出了一種基于等積環形分割特征的圖像識別算法。使用等積環形分割、改進的Sobel算子卷積,根據其梯度方向及幅值進行計算,綜合考慮了匹配過程中定位的精準度以及顯著特征點的提取匹配。實驗結果表明本算法能夠以95.9%的準確率區分外表相似度極高的高頻元件,具有實際的應用價值。
