一種分析并聯機構輸出運動能力特性的新方法
2022-12-30 04:21:30羅建國邱杰清趙韻秋
機械設計與制造 2022年12期
羅建國,李 攀,邱杰清,趙韻秋
(1.華北科技學院機電工程學院,北京 101601;2.河北省礦山設備安全監測重點實驗室,北京 101601;3.華北科技學院研究生院,北京 101601)
1 引言
在工業機器人產品的開發流程中,運動學和動力學分析是驗證新型動作機構設計方案可行性的必需環節。具備典型的工藝軌跡作為機器人產品能夠實現預定功能的先決條件,也是使用動力學模型進行仿真計算的重要依據。因此,在滿足產品基礎設計的條件下,完成機器人動作機構運動軌跡的規劃便形成了機構運動仿真分析的理論基礎和前提,而求解機構的自由度對于判斷所設計的機構是否具有唯一的運動軌跡至關重要,也是分析機構運動能力特性的關鍵指標。當前流行的自由度計算公式和方法主要是以古典機構和并聯機構為研究對象來開展的[1]。文獻[2]于1983年首次提出一種3自由度并聯機構以來,很多學者在機構自由度分析領域做出了重要的貢獻,然而,計算一般機構自由度所采用的G?K公式在機構設計過程中卻難以得到正確應用,復雜機構運動特性分析過程中存在的缺陷和問題目前仍未得到有效地解決。在這種背景下,開發一種可靠的并聯機構自由度計算理論并促生行之有效的機構運動能力特性分析方法,亦因此成為機構設計工程領域的研究熱點。
目前,已有眾多學者就如何精確求解并聯機構的自由度提出了一些列方法。文獻[3?4]提出的基于約束螺旋理論的自由度分析方法和修正G?K公式,能夠有效地對并聯機構的自由度進行數值求解并且具備良好的通用性。文獻[5]建立了并聯機構的新字符描述,采取螺旋參數化表達結合字符描述的手段完成了分支運動螺旋系的自動求解,并且基于線性代數中的初等行變換和含“未定幾何關系”軸線之間的相對自由度,實現了空間并聯機構的自由度數字化自動分析。文獻[6]基于分形理論和機構拓撲圖,提出了一種簡單有效的混聯機器人構型綜合理論和設計方法,并以三平移三自由度混聯機構為例對該方法的正確性進行了檢驗。文獻[7]提出了一種可重構空間五桿機構,且利用螺旋理論分析和證明了可重構并聯機構可以實現四種不同的運動模式。文獻[8]基于R(3,3)幾何代數空間,提出了一種符號描述并聯機構自由度的自動化分析算法,對于分析機構在特定參數和位置情況下的自由度及運動情況十分有利。文獻[9]提出了一類含較少運動副的四支鏈兩轉一移三自由度并聯機構,并基于極限約束力螺旋系的概念對所提出并聯機構的運動副數目是否為同類機構中最少進行了論證。
然而,現有的機構自由度計算方法及公式仍存在不足之處,主要體現在:(1)自由度計算結果的形式單一。現有的計算方法多專注于機構自由度的數值計算,未能兼顧符號解或者解析表達式的輸出形式;(2)計算結果模糊。機構分支的自由度在很大程度上體現著其對于輸出構件的約束作用,基于“集合求交運算避開過約束”原理的自由度計算方法往往用于機構整體自由度的計算,而一般的方法和公式未能避免過約束的重復計算,以至于影響了計算精度[10]。
值得一提的是,混聯機構覆蓋了并聯機構剛性好、精度高以及串聯機構運動空間大、靈巧性好的優點,同時又回避了單純串、并聯機構各自的缺點,極大提高了機器人機構設計對于產品性能需求的適應性,在學術界和工業領域得到了廣泛關注,已發展成機構學研究領域的一個重要研究方向[11]。
以有效和系統地分析并聯機構的輸出運動能力特性為目標,提出了基于“最短支鏈∕支鏈對”的“木桶原理分析法”。研究過程通過運用主?副運動理論和機構輸入?輸出運動綜合轉化公式,導出并聯機構的輸出運動特性的一般計算結果表達式,并使用修正的G?K 公式對7 種不同姿態下的SPS∕SPU∕UPS 結構的4?6 支鏈并聯機構的輸出運動特性進行了分類對比研究,得到了并聯機構輸出運動能力特性的影響因素和規律。借助等效串聯機構、廣義等效串聯機構分別描述并聯機構和混聯機構,并以實例演示了機構輸出運動能力特性的計算分析方法和結果。
采用的有關方法和結論為研究并聯機構、混聯機構輸出運動特性及其具體構成、工作空間、奇異、耦合性等提供了一體化系統分析途徑,進一步豐富了機構設計工程領域的理論內容,對于機器人產品的設計和制造具有重要的應用價值和研究意義。
2 隨運動綜合轉化公式
基于主?副運動理論,串聯機構或并聯機構的單一支鏈所對應的輸入?輸出運動綜合轉化公式的基本形式如式(1)~式(6)所示。
一階伴隨輸出平移運動計算公式如下:
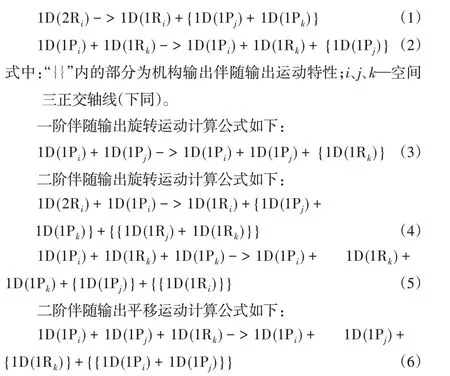
有關一階、二階伴隨運動存在性,三階及以上伴隨運動的不存在性,其他情形的輸入?輸出運動綜合轉化的過程和規律參照以上過程,在此不再贅述。
3 一類并聯機構的構型與姿態
關節、支鏈是串聯機構、并聯機構、混聯機構的基本組成元素,根據關節和支鏈的不同,對不同類型和情形的并聯機構形式進行了定義,從而可為后續過程中,基于主?副運動理論、支鏈輸入?輸出運動綜合轉化公式對由SPS∕SPU∕UPS結構組成的4?6支鏈并聯機構的自由度進行計算分析奠定概念基礎。
首先,定義兩種構型的并聯機構形式:
A構型并聯機構:4?6支鏈a?SPS?b?SPU或者a?SPS?b?UPS并聯機構(其中a≥0,b≥1,a+b=n,n=4∕5∕6)。
B構型并聯機構:完全由SPS支鏈組成的4?6支鏈并聯機構n?SPS(n=4∕5∕6)。
其次,設定X1為支鏈與靜平臺的關節鉸接點,X3為支鏈與動平臺的關節鉸接點,O、E分別為靜平臺、動平臺的形心,定義七種并聯機構的空間結構姿態:
C1態:并聯機構各支鏈所在直線X1X3與X1O構成的所有平面中有1個平面與靜平臺所在的水平面Oxy垂直,且X1O與X3E有1組平行,如圖1所示。
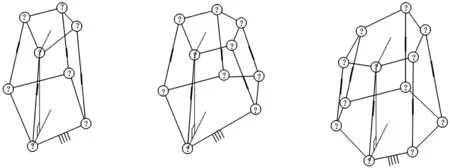
圖1 A∕B構型并聯機構處于C1態示意圖Fig.1 The Schematic Diagram of A∕B Parallel Mechanism in C1 State
C2態:并聯機構各支鏈所在直線X1X3與X1O構成的所有平面中有2個平面與靜平臺所在的水平面Oxy垂直,且2個鉛垂面之間也相互垂直。另外,X1O與X3E有2組平行,且位于動靜平臺上的這兩組直線在各自平面內相互垂直,如圖2所示。
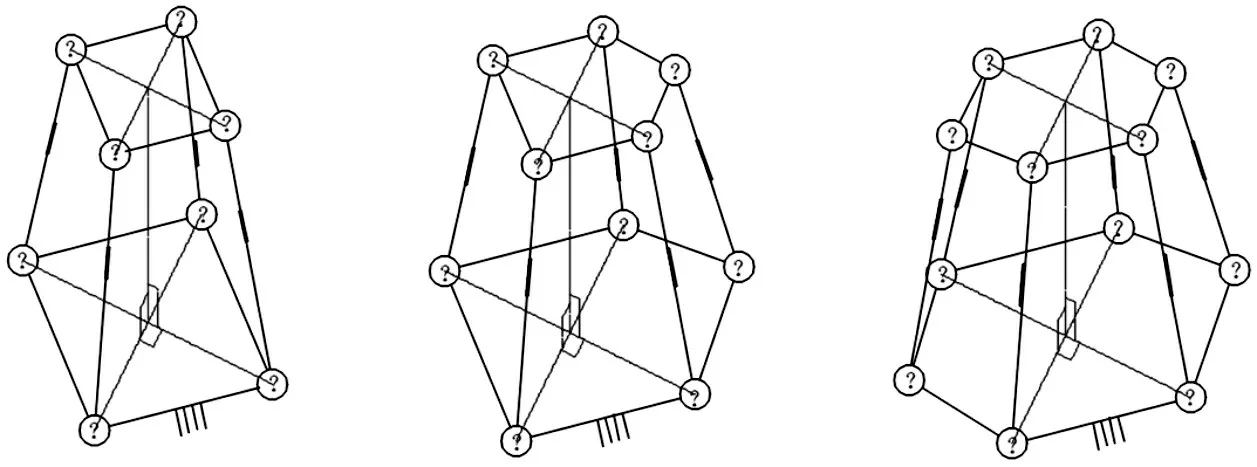
圖2 A∕B構型并聯機構處于C2態示意圖Fig.2 The Schematic Diagram of A∕B Parallel Mechanism in C2 StateC3態:并聯機構各支鏈所在直線X1X3與X1O構成的所有平面中有1個平面與靜平臺所在的水平面Oxy垂直,但X1O與X3E均不平行,如圖3所示。
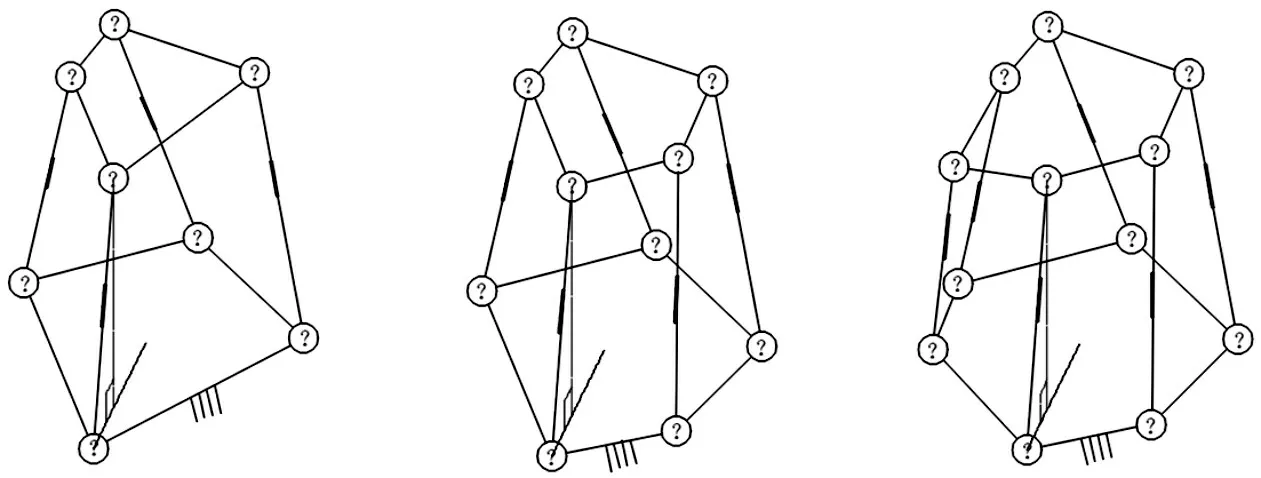
圖3 A∕B構型并聯機構處于C3態示意圖Fig.3 The Schematic Diagram of A∕B Parallel Mechanism in C3 State
C4態:并聯機構各支鏈所在直線X1X3與X1O構成的所有平面中有2個平面與靜平臺所在的水平面Oxy垂直,且2個鉛垂面之間也相互垂直,但X1O與X3E均不平行,如圖4所示。
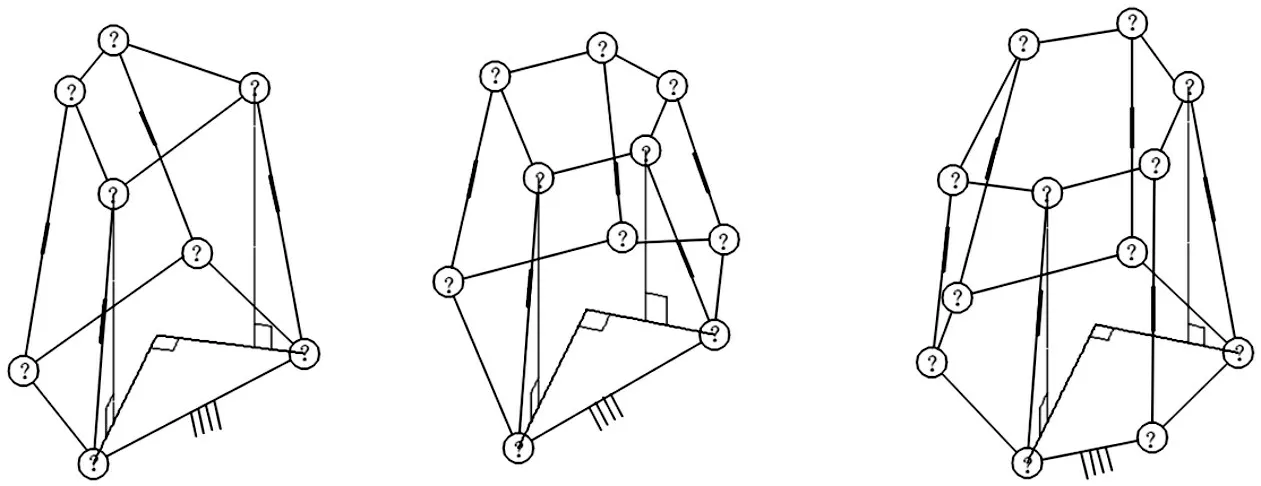
圖4 A∕B構型并聯機構處于C4態示意圖Fig.4 The Schematic Diagram of A∕B Parallel Mechanism in C4 State
C5態:并聯機構各支鏈所在直線X1X3與X1O構成的所有平面與靜平臺所在的水平面Oxy均不垂直,但X1O與X3E有1組平行,如圖5所示。
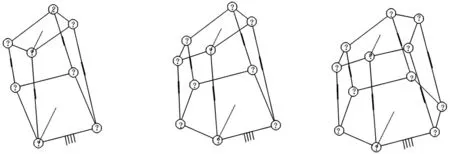
圖5 A∕B構型并聯機構處于C5態示意圖Fig.5 The Schematic Diagram of A∕B Parallel Mechanism in C5 State
C6 態:并聯機構各支鏈所在直線X1X3與X1O構成的平面與靜平臺所在的水平面Oxy均不垂直,但X1O與X3E有2 組平行,且位于動靜平臺上的這兩組直線在各自平面內相互垂直,如圖6所示。
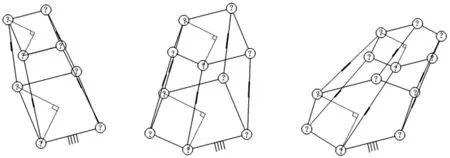
圖6 A∕B構型并聯機構處于C6態示意圖Fig.6 The Schematic Diagram of A∕B Parallel Mechanism in C6 State
C7態:并聯機構各支鏈所在直線X1X3與X1O構成d的平面與靜平臺所在的水平面Oxy均不垂直,且X1O與X3E均不平行,如圖7所示。
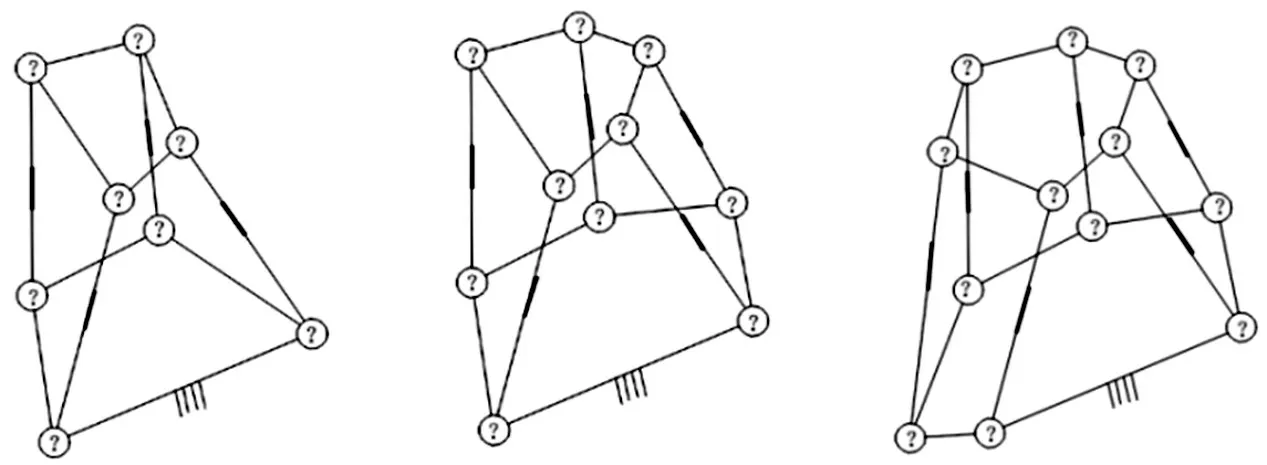
圖7 A∕B構型并聯機構處于C7態示意圖Fig.7 The Schematic Diagram of A∕B Parallel Mechanism in C7 State
4 并聯機構輸出運動能力特性“木桶原理分析法”
由木桶效應的含義可知,構成組織的各個部分往往是優劣不齊的,而劣勢部分往往決定整個組織的水平。根據木桶原理的短板理論,針對有效和系統地分析并聯機構運動能力特性的問題,提出了基于“最短支鏈”或“最短支鏈對”的“木桶原理分析法”。
4.1 基本概念與方法
并聯機構輸出運動能力特性由各支鏈輸出運動能力特性的交集綜合而成。將受限最多且自身輸出運動能力空間維度最少、同時與其他支鏈擁有最少共同輸出運動能力特性的支鏈定義為“最短支鏈”。若同時存在2條及以上的“最短支鏈”,且該兩條支鏈相互間還存在特殊的空間構造關系,則選取其中最有代表性且構造關系特殊的2條支鏈組成“最短支鏈對”。“最短支鏈”或“最短支鏈對”的輸出運動能力特性對并聯機構的輸出運動能力特性具有決定作用,即:(1)當并聯機構各組成支鏈具有相同的結構形式時,并聯機構輸出運動能力特性則取決于空間位置和姿態受到約束限制最多的支鏈,若有1條支鏈屬于特殊狀態,那么,就可以對這一輸出運動能力空間維度最少的支鏈展開分析,用其運動能力特性的分析結果來等效獲得并聯機構的輸出運動能力特性;(2)當有2條支鏈處于空間特殊狀態時,這2條支鏈的輸出運動受限最多,則通過對這2條支鏈進行綜合分析,將所有約束運動去除后即可得到等效并聯機構的輸出運動能力特性。因此,通過對該1條或2條支鏈運動能力特性進行分析,便可以獲得整個并聯機構的輸出運動能力特性結果。
將這種通過分析并聯機構“最短支鏈”或“最短支鏈對”(簡寫為“最短支鏈/支鏈對”)的輸出運動能力特性結果,進而等效獲得對應并聯支鏈輸出運動能力特性的方法被定義為“木桶原理分析法”。應用提出的“木桶原理分析法”,分析并聯機構輸出運動能力特性的具體步驟如下:
(1)依據并聯機構輸出運動能力特性合成的“木桶原理”,確定此時機構的“最短支鏈”。
(2)將固定坐標系的構建與“最短支鏈”關聯起來,盡量使固定坐標系的水平軸與“最短支鏈”或“最短支鏈對”分別處于三維直角坐標系的兩個鉛垂面上,并確定對應的輸入運動分量和主輸出運動分量。
(3)根據“最短支鏈”兩端的關節鉸點分別與靜平臺、動平臺各自形心的連線是否平行,判別該廣義2轉動串聯機構的第2級桿的桿長是否退化為零。
若上述的這兩條連線平行,則該廣義2轉動串聯機構的第2級桿的桿長退化為零,此時不存在由2個轉動輸入運動綜合而成的一階伴隨移動運動。
(4)依據“最短支鏈/支鏈對”輸入運動分量,分析并確定“最短支鏈/支鏈對”全部一階伴隨輸出運動分量。
(5)依據“最短支鏈/支鏈對”的輸入運動分量及其全部一階伴隨運動,對其二階伴隨輸出運動分量進行判別分析。
(6)綜合(2)~(5)的結果,得到代表并聯機構輸出運動能力特性的“最短支鏈/支鏈對”的輸出運動能力特性的全部構成,獲得并聯機構對應的主輸出運動自由度M?DOF、伴隨輸出運動自由度P?DOF(通過伴隨運動性質和空間維度來區分,但是不區分一階、二階伴隨運動,按空間三維轉動、三維移動的吸收原則和合并原則得到)、輸出運動自由度O?DOF(通過輸出運動性質和空間維度來區分,但是不區分主運動、伴隨運動,按空間三維轉動、三維移動的吸收原則、合并原則得到)。
情形1?1(Q11):A 構型并聯機構(P(A)),同時處于C1 態(C1),描述為Q11=P(A)⊕C2,如圖1所示。
按照前面給出的方法分析可以得知:
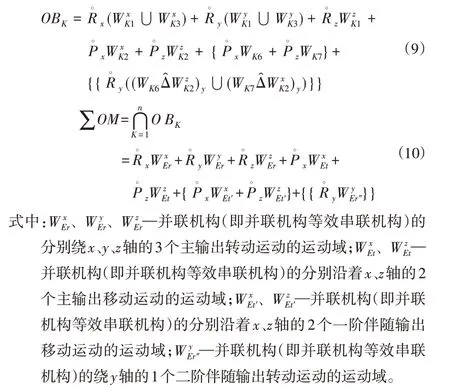
(4)由n條支鏈構成的并聯機構的輸出運動能力特性,可以由構成該并聯機構的n條支鏈的輸出運動能力特性的交集綜合運算分析得到,其表達式如式(10)所示。
4.2 實例分析
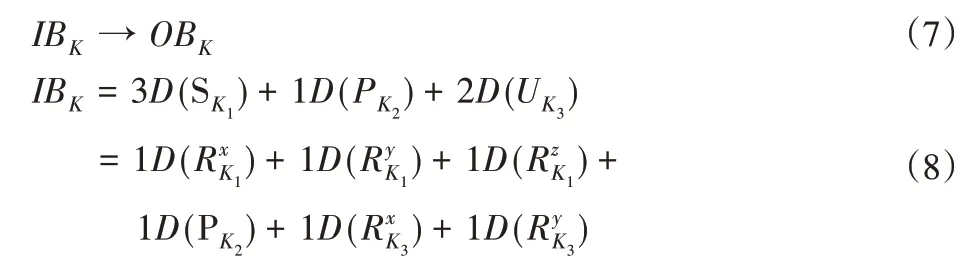
并聯機構中,第K條支鏈的輸入運動能力轉化為輸出運動能力特性的過程以式(7)表示。其中,第K條支鏈的輸入運動能力特性由支鏈上的S、P、U關節的輸入運動能力特性集合而成,如式(8)所示。
此時并聯機構的M?DOF=5、P?DOF=3、O?DOF=5。
情形1?2(Q12):A 構型并聯機構(P(A)),同時處于C2 態(C2),描述為Q12=P(A)⊕C2,如圖2所示。
依據前述方法分析可知:
(1)依據選取的“最短支鏈對”的空間狀態,將固定坐標系的x軸、y軸分別與兩正交鉛垂平面和水平面的交線重合,該“最短支鏈對”移動關節的運動所沿著x軸、y軸方向的分量將均不存在,故只有沿著z軸方向的移動運動分量。
(2)“最短支鏈對”由于2個平行繞x軸、y軸的轉動輸入而產生的沿著y軸、x軸方向的一階伴隨移動輸出運動不存在,只有沿著z軸方向的一階伴隨移動輸出。
(3)對支鏈上各關節輸入運動與一階伴隨輸出運動進行綜合分析,可知“最短支鏈對”不存在二階伴隨輸出運動。
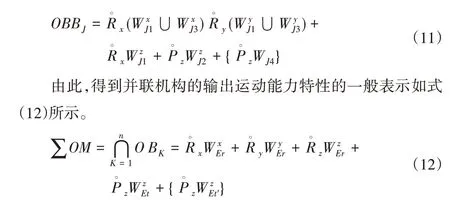
結合前面分析結果得到“最短支鏈對”的輸出運動能力特性結果表示,如式(11)所示。
此時并聯機構的M?DOF=4、P?DOF=1、O?DOF=4。
情形1?3(Q13):B 構型并聯機構(P(B)),同時處于C1 態(C1),描述為Q13= P(B)⊕C1,如圖1所示。
借鑒情形1?1的分析過程和方法,可以得知:
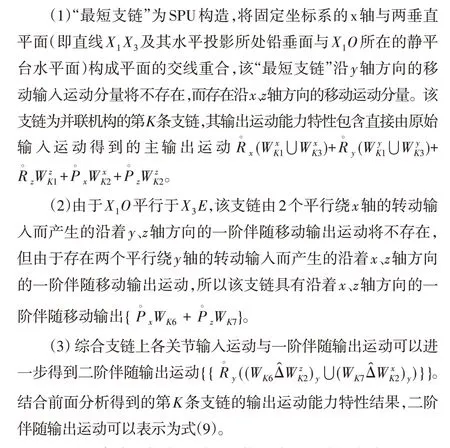
(1)“最短支鏈”為SPS構造,將固定坐標系的x軸與兩垂直平面構成平面的交線重合,該支鏈沿著y軸方向移動輸入運動分量將不存在,而有沿著x、z軸方向的移動運動分量。
(2)“最短支鏈”有2個平行繞x軸的轉動輸入而產生的沿著y、z軸方向的一階伴隨移動輸出運動將不存在,但由于兩個平行繞y軸的轉動輸入而產生的沿著x、z軸方向的一階伴隨移動輸出運動將存在。
且兩個平行繞z軸的轉動輸入而產生的沿著x、y軸方向的一階伴隨移動輸出運動也將存在,所以該支鏈具有沿著x、y、z軸方向的一階伴隨移動輸出運動。
(3)對支鏈上各關節輸入運動與一階伴隨輸出運動做進一步綜合分析,可以得知支鏈存在繞x、y、z軸的二階伴隨轉動輸出運動。
將此時的并聯機構視為一個等效串聯機構,并聯機構輸出運動能力特性表示如式(13)所示。
此時并聯機構的M?DOF=5、P?DOF=6、O?DOF=6。
情形1?4(Q14):B 構型并聯機構(P(B)),同時處于C2 態(C2),描述為Q14= P(B)⊕C2,如圖2所示。
借鑒情形1?2的分析過程和方法,可以得知:
(1)“最短支鏈對”均為SPS構造,將固定坐標系的x軸、y軸分別與兩正交鉛垂平面和水平面的交線重合,該“最短支鏈對”移動關節的運動所沿著x軸、y軸方向的分量都將不存在,而只有沿著z軸方向的移動運動分量。
(2)“最短支鏈對”有2組分別平行繞x、y軸的轉動輸入而產生的沿著y、x軸方向的一階伴隨移動輸出運動將不存在,由于兩個平行繞z軸的轉動輸入而產生的沿著x、y軸方向的一階伴隨移動輸出運動還將存在,所以該“最短支鏈對”仍具有沿著x、y、z軸方向的一階伴隨移動輸出。
(3)對支鏈上各關節輸入運動與一階伴隨輸出運動進行綜合分析,可知“最短支鏈對”存在繞x、y軸的二階伴隨轉動輸出運動。
結合前面分析結果得到“最短支鏈對”所代表的并聯機構輸出運動能力特性結果表示如式(14)所示。
此時并聯機構的M?DOF=4、P?DOF=5、O?DOF=6。
機構中存在相當數量的不起限制作用的過約束,但一般的自由度計算公式將這部分自由度重復計算,從而導致自由度計算不能得到正確的結果。
鑒于修正的G?K公式在進行并聯機構自由度數值求解方面的有效性和良好的通用性,將借助修正的G?K公式對所列4種情形的機構自由度進行計算,并將計算結果與采用所提出的并聯機構輸出運動能力特性分析方法得到的分析結果進行對比研究,從而可以對上述4種情形分析結果的正確性進行驗證。
經過黃真修正的G?K公式如下:

式中:M—機構自由度數目;n—構件數目;g—運動副數目;fi—第i個運動副的自由度數目;d—機構的階數;λ—公共約束數目;ν—多環并聯機構在公共約束因素后的冗余約束數目;ζ—機構的局部自由度數目。
式(10)、式(12)、式(14)提出的并聯機構輸出運動能力特性“木桶原理分析法”結合主?副運動理論和機構輸入?輸出綜合轉化公式分析得來,是并聯機構在4種情形下的輸出運動能力特性一般計算結果的表達式。
對于上述4種情形并聯機構形式,分別采用修正的G?K公式和機構輸出運動能力特性一般計算結果的表達式對并聯機構的自由度進行計算分析,計算結果對比,如表1所示。
由表1可知,采取機構輸出運動能力特性表達式計算所得的機構自由度結果包括M?DOF、P?DOF和O?DOF。而基于修正的G?K公式計算所得的自由度分析結果則只有一個(M),且該結果與基于輸入?輸出運動綜合轉化公式計算所得機構自由度結果中的M?DOF相同。因此,經過比較可以發現:在機構自由度分析方面,基于輸入?輸出運動綜合轉化公式的機構自由度分析方法表現的更加全面、深入和具體,其能夠有效彌補現有并聯機構自由度分析理論的不足,可以為并聯機構工作空間、奇異、耦合特性的一體化系統研究提供更加適當的途徑。
表1 A/B構型并聯機構在C1/C2狀態下的自由度分析Tab.1 DOF Analysis of A/B Parallel Mechanism in C1/C2 State
參照4 種情形給出如下定義:Q21=P(A)⊕C3、Q22=P(A)⊕C4、Q23=P(B)⊕C3、Q24=P(B)⊕C4,借鑒參考對應的分析方法,采用修正的G?K公式進一步對其驗證分析,得到如表2所示的有關結論。

表2 A/B構型并聯機構在C3/C4狀態下的自由度分析Tab.2 DOF Analysis of A/B Parallel Mechanism in C3/C4 State
同理,可以給出如下定義:Q31=P(A)⊕C5、Q32=P(A)⊕C6、Q33=P(B)⊕C5、Q34=P(B)⊕C6,借鑒對應的分析方法,得到如表3所示的有關結論。
表3 A/B構型并聯機構在C5/C6狀態下的自由度分析Tab.3 DOF Analysis of A/B Parallel Mechanism in C5/C6 State
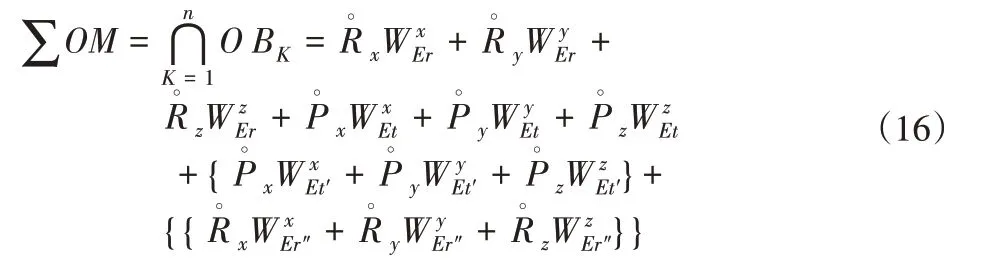
此外,還可以給出情形4?1(Q41)的定義:A構型并聯機構或者B 構型并聯機構(P(A∕B)),同時處于C7 狀態(C7),描述為Q41=P(A∕B)⊕C7,如圖7所示。
此時,并聯機構各支鏈上均存在沿x、y、z軸方向的移動輸入運動和繞x、y、z軸的轉動輸入運動。通過各支鏈輸出末端運動能力特性的交集綜合計算分析,可知并聯機構存在沿x、y、z軸方向的一階伴隨移動輸出運動,存在繞x、y、z軸的二階伴隨轉動輸出運動,其輸出運動能力特性的一般表示如式(16)所示。
對該情形的并聯機構采用修正的G?K公式計算分析,得到的有關結論,如表4所示。
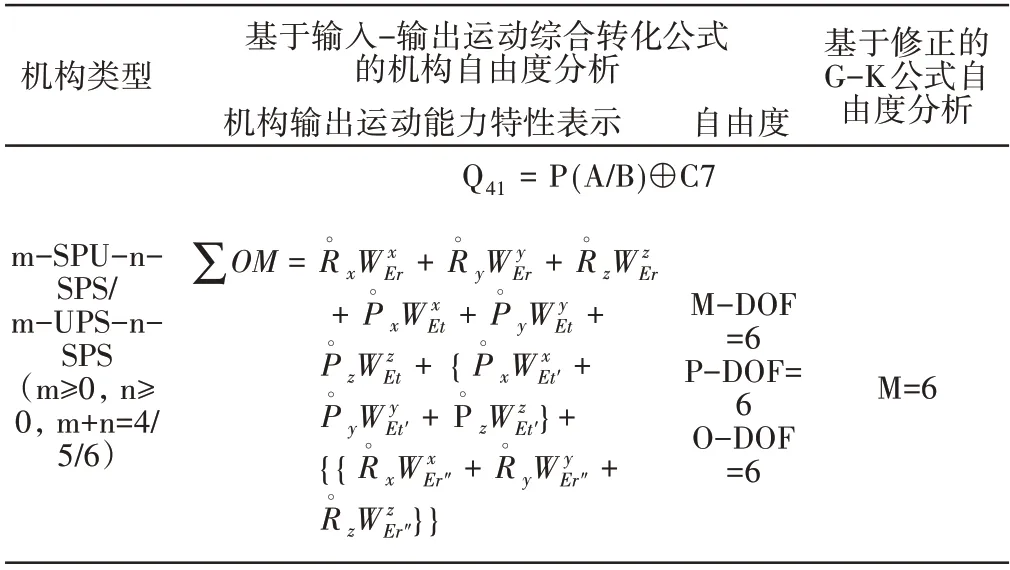
表4 A/B構型并聯機構在C7狀態下的自由度分析Tab.4 DOF Analysis of A/B Parallel Mechanism in C7 State
根據表1~表4內的比較結果顯示:
(1)m?SPU?n?SPS∕m?UPS?n?SPS(m≥1,n≥0,m+n=4∕5∕6)并聯機構處于不同的空間姿態和構造形態時,其自由度主要受兩個因素的影響:①由支鏈所在的直線、支鏈靜平臺連接點與靜平臺形心的連線所構成的平面,與靜平臺所在的平面是否垂直;②由支鏈靜平臺連接點和靜平臺形心所形成的連線,與由同一支鏈動平臺連接點和動平臺形心所形成的連線是否平行。該并聯機構處于C1、C2兩種狀態時,M?DOF=4∕5,P?DOF=1∕3,O?DOF=4∕5;處于C3、C4兩種狀態時,M?DOF=4∕5,P?DOF=5∕6,O?DOF=6;處于C5、C6 兩種狀態時,M?DOF=6,P?DOF=3∕5,O?DOF=6;處于C7狀態時,M?DOF=6,P?DOF=6,O?DOF=6。
(2)并聯機構n?SPS(n=4∕5∕6)處于不同空間姿態和構造形態時,其自由度同樣受兩因素影響:①由支鏈所在直線、支鏈靜平臺連接點與靜平臺形心的連線所構成的平面,與靜平臺所在的平面是否垂直;②由支鏈靜平臺連接點和靜平臺形心所形成的連線,與由同一支鏈動平臺連接點和動平臺形心所構成的連線是否平行。該并聯機構處于C1、C2、C3、C4四種狀態時,M?DOF=4∕5,P?DOF=5∕6,O?DOF=6;處于C5、C6兩種狀態時,M?DOF=6,P?DOF=5∕6,O?DOF=6;處于C7狀態時,M?DOF=6,P?DOF=6,O?DOF=6。
(3)基于支鏈輸入?輸出運動綜合轉化公式進行求交綜合運算所得到并聯機構的M?DOF、P?DOF、O?DOF具體數值,與通過修正的G?K公式計算得到的機構自由度分析結果M值不完全相同,表現為:有的M值與O?DOF數值相同,有的M與M?DOF數值相同。其原因是G?K公式不能揭示輸入運動與輸出運動之間的綜合轉化關系和規律。
深入探索以上對比研究分析的結果,可以總結得到并聯機構輸出運動能力特性的影響因素和規律,即:(1)水平面內一個或兩個方向的主輸出移動運動是否存在由支鏈的空間姿態決定;(2)水平面內一個方向的一階伴隨移動運動是否存在取決于動平臺的空間姿態;(3)動平臺上的關節位置、動平臺結構和動平臺的空間姿態共同決定了水平面內2個方向的一階伴隨移動運動是否存在;(4)構建固定坐標系使某一個或兩個支鏈分別位于其鉛垂面上,可令機構水平面內1個或2個輸出主運動分量消失;而選擇靜平臺平面與固定坐標系的水平面重合,能達到使機構水平面內1個或2個一階伴隨移動輸出分量消失的效果。
5 混聯機構輸出運動能力特性分析
混聯機構兼具串聯和并聯機構的優點,令其具備較高的開發價值和推廣前景。依據串聯機構與并聯機構的連接方式不同,可以將混聯機構分成三類,即:串?并?串、并?串?并、并?串式(等同于串?并式)。將機構的運動關節以方框代替,并以線段連接表示機構的支鏈,以此來繪制機構的平面拓撲示意圖。其中,串聯、并聯機構的平面拓撲示意圖,如圖8、圖9所示。并?串?并、并?串、串?并?串形式混聯機構拓撲示意圖,如圖10~12所示。并聯機構的等效串聯機構或關節拓撲示意圖,如圖13所示。圖10、圖11、圖12所對應的混聯機構的廣義等效串聯機構拓撲示意圖,如圖14~圖16所示。

圖8 串聯機構拓撲示意圖Fig.8 The Topological Schematic Diagram of Series Mechanism
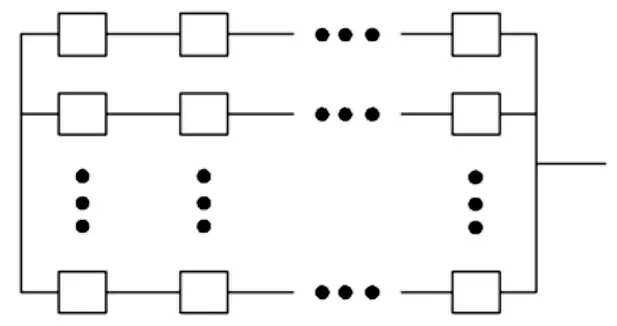
圖9 并聯機構拓撲示意圖Fig.9 The Topological Schematic Diagram of Parallel Mechanism
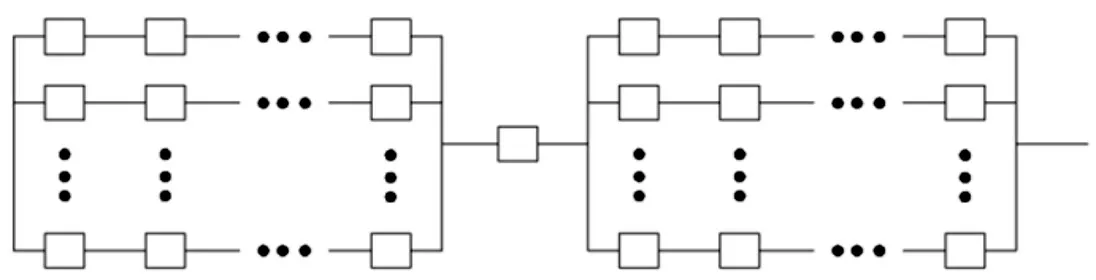
圖10 并?串?并形式混聯機構拓撲示意圖Fig.10 The Topological Schematic Diagram of Hybrid Mechanism with Parallel?Series?Parallel Forms
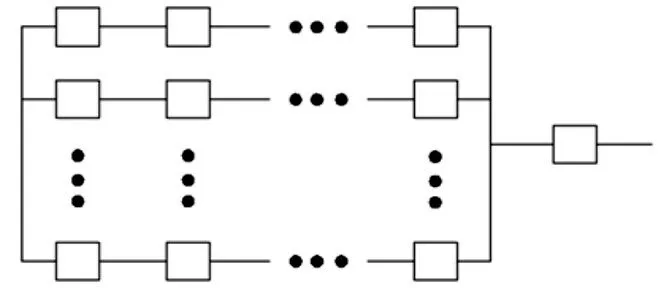
圖11 并?串形式混聯機構拓撲示意圖Fig.11 The Topological Schematic Diagram of Hybrid Mechanism with Parallel?Series Forms
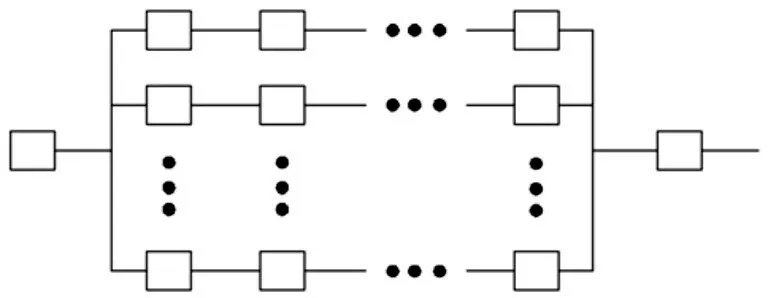
圖12 串?并?串形式混聯機構拓撲示意圖Fig.12 The Topological Schematic Diagram of Hybrid Mechanism with Series?Parallel?Series Forms
圖13 并聯機構的等效串聯機構或關節拓撲示意圖Fig.13 The Topological Schematic Diagram of Equivalent Series Mecha?nism or Joint of Parallel Mechanism

圖14 并?串?并形式混聯機構廣義等效串聯機構拓撲示意圖Fig.14 The Topological Schematic Diagram of Generalized Series Mech?anism of Hybrid Mechanism with Parallel?Series?Parallel Forms

圖15 并?串形式混聯機構廣義等效串聯機構拓撲示意圖Fig.15 The Topological Schematic Diagram of Generalized Series Mech?anism of Hybrid Mechanism with Parallel?Series Forms

圖16 串?并?串形式混聯機構廣義等效串聯機構拓撲示意圖Fig.16 The Topological Schematic Diagram of Generalized Series Mech?anism of Hybrid Mechanism with Series?Parallel?Series Forms
針對2SPS?3SPU?RR 混聯機構,建立的直角固定坐標系,可知該機構由并聯機構2SPS?3SPU和串聯支鏈RxRy構成,如圖17所示。
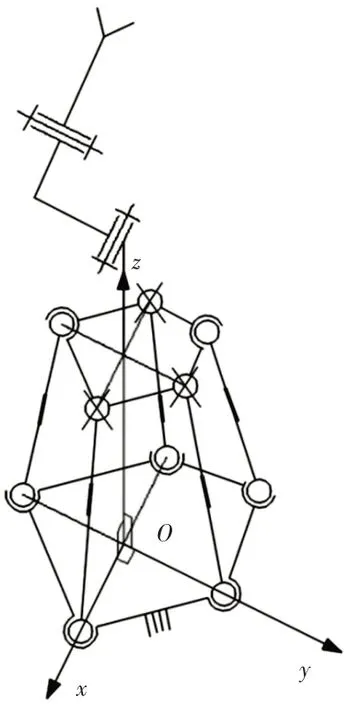
圖17 2SPS?3SPU?RR混聯機構Fig.17 2SPS?3SPU?RR Hybrid Mechanism
假設并聯機構2SPS?3SPU滿足前面分析Q12= P(A)⊕C2條件,串聯支鏈上的轉動關節軸線分別平行于固定坐標系的x、y軸。借助表1中Q12= P(A)⊕C2的分析結論,可得機構并聯部分的輸出運動能力特性可用式(17)表示。
混聯機構的廣義等效串聯機構Gs的輸出運動能力特性可以通過輸入?輸出運動綜合轉化公式計算得到,如式(19)所示。其中,符號“Δˉ”代表運動元素域移動運算,符號“Δ?”代表運動元素域轉動運算,符號“?”代表運動元素域并運算,對應運動域括號外的下標()x、()y、()z表示只選取運動沿著或繞該下標所示軸方向的區間域。
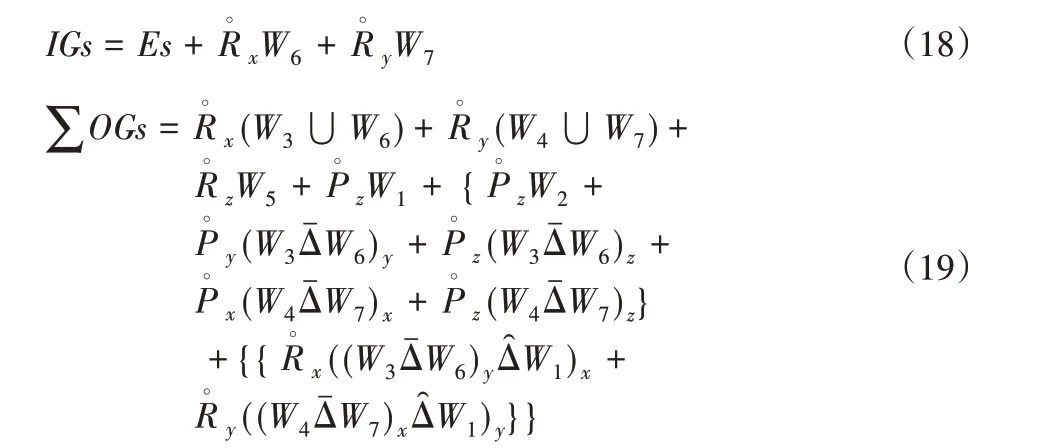
依據式(19)的計算分析結果,可以得知混聯機構的M?DOF=4,P?DOF=5,O?DOF=6。
本例證明了以等效串聯機構或關節代替分析并聯機構的輸出運動能力特性和以廣義等效串聯機構代替分析混聯機構的輸出運動能力特性的研究路線是正確的,基于“最短支鏈∕支鏈對”的并聯機構輸出運動能力特性“木桶原理分析法”能夠在解決混聯機構輸出運動能力特性分析問題過程中發揮重要作用。
6 結論
提出了基于“最短支鏈∕支鏈對”的并聯機構輸出運動能力特性“木桶原理分析法”,同時基于主?副運動理論,運用機構輸入?輸出運動綜合轉化公式和解析分析,針對7種不同姿態下的SPS∕SPU∕UPS結構的4?6支鏈并聯機構的輸出運動特性進行了分類對比研究。并借助等效串聯機構、廣義等效串聯機構的概念,對2SPS?3SPU?RR混聯機構的輸出運動特性進行了分析計算,得到如下結論:
(1)支鏈的空間姿態是水平面內一個或兩個方向的主輸出移動運動是否存在的決定因素。構建固定坐標系令某一個或兩個支鏈分別位于其鉛垂面上,可以使機構水平面內1個或2個輸出主運動分量消失。最短支鏈的空間姿態是水平面內x/y方向的主輸出移動運動分量是否存在的決定因素;最短支鏈對的空間姿態對于水平面內x、y方向主輸出移動運動是否存在具有決定作用。
(2)動平臺的空間姿態決定著水平面內一個方向的一階伴隨移動運動是否存在;動平臺上關節位置、動平臺結構和動平臺空間姿態共同決定著水平面內2個方向的一階伴隨移動運動是否存在。最短支鏈∕支鏈對兩端關節鉸點到所在動、靜平臺形心的連線是否平行,決定了水平面內x∕y方向的一階伴隨移動運動是否存在。最短支鏈對兩端關節鉸點到所在動、靜平臺形心的連線在各自平臺平面內是否正交,以及最短支鏈對兩端關節鉸點到所在動、靜平臺形心的連線是否均分別平行,決定了水平面內x、y方向的一階伴隨移動運動是否存在。
(3)構建固定坐標系使某一個或兩個支鏈分別位于其鉛垂面上,可令機構水平面內1個或2個輸出主運動分量消失;而選擇靜平臺平面與固定坐標系的水平面重合,能達到使機構水平面內1個或2個一階伴隨移動輸出分量消失的效果。
(4)并聯機構可以用等效串聯機構或關節代替分析其輸出運動能力特性,而混聯機構可以用廣義等效串聯機構代替分析其運動能力特性。混聯機構輸出運動能力特性計算實例證明了基于“最短支鏈∕支鏈對”的并聯機構輸出運動能力特性“木桶原理分析法”在系統分析機構輸出運動特性的有效性。
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
動漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
電子制作(2018年18期)2018-11-14 01:48:24
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
無人機(2017年10期)2017-07-06 03:04:36
山東工業技術(2016年15期)2016-12-01 05:31:22
小星星·閱讀100分(低年級)(2015年10期)2015-10-22 08:30:04
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
