便攜式自動割膠機(jī)器人關(guān)鍵技術(shù)研究
2022-12-30 04:21:28羅慶生林彬彬李凱林
機(jī)械設(shè)計(jì)與制造 2022年12期
關(guān)鍵詞:設(shè)計(jì)
羅慶生,林彬彬,李凱林,王 彥
(1.北京理工大學(xué)機(jī)電學(xué)院,北京 100081;2.北京理工大學(xué)機(jī)械與車輛學(xué)院,北京 100081;3.海南中學(xué),海南 海口 571158)
1 引言
天然橡膠具有高彈性、高延展性、高耐磨性等良好特點(diǎn),可廣泛應(yīng)用于國民經(jīng)濟(jì)建設(shè)各個(gè)領(lǐng)域。近年來,天然橡膠的需求量在日益增加,而傳統(tǒng)產(chǎn)膠方式已嚴(yán)重落后,對各種自動化割膠設(shè)備的需求也就愈發(fā)迫切。
相當(dāng)長時(shí)間以來,人們對自動化割膠機(jī)器設(shè)備的研究此起彼伏、未曾停歇。例如,由印度學(xué)者馬修·扎卡里亞斯發(fā)明的割膠機(jī)器人由凸輪機(jī)、割膠刀、轉(zhuǎn)軸等構(gòu)成[1],雖能切割出較為理想的膠槽軌跡,但成本過高,且適應(yīng)性不強(qiáng)、可靠性不好;我國學(xué)者設(shè)計(jì)出的電動割膠、割松油機(jī)雖能實(shí)現(xiàn)預(yù)期功能,但定位困難,對操作要求十分嚴(yán)格[2];文獻(xiàn)[3]設(shè)計(jì)了一種綁在樹上使用的割膠機(jī)器人,初步實(shí)現(xiàn)了自動割膠,但無法準(zhǔn)確保證切割深度;2016年,武漢市享昱科技有限公司發(fā)明了一種自動割膠機(jī)器人,但其無法適用不同樹徑的膠樹;由中國熱帶農(nóng)業(yè)科學(xué)院橡膠研究所與寧波漢浦工具有限公司共同研發(fā)的[4]“橡豐4GXJ-I 型電動膠刀”仍須手持割膠,并未擺脫依賴人工操作的不足;文獻(xiàn)[5]設(shè)計(jì)的可獨(dú)立操作的半自動軌道式割膠機(jī)器人,還存在著無法選擇切割軌跡的問題;隨著人工智能的興起,文獻(xiàn)[6]提出開發(fā)一種可以通過具有障礙物檢測功能的橡膠種植園自主導(dǎo)航的機(jī)器,可以附加諸如割膠和膠乳收集之類的子任務(wù),并且可以用于提高效率并降低天然橡膠的生產(chǎn)成本。
綜上可見,目前國內(nèi)外仍未研制出一種攜帶方便、使用簡單、結(jié)構(gòu)精煉、成本低廉的全自動智能化割膠設(shè)備。針對割膠工作的特點(diǎn),詳細(xì)介紹了所設(shè)計(jì)的便攜式自動割膠機(jī)器人的機(jī)械結(jié)構(gòu)、運(yùn)動原理、控制特點(diǎn),并對運(yùn)動功能進(jìn)行了分析與討論。
2 機(jī)器人的設(shè)計(jì)分析
2.1 理想割膠軌跡要求
傳統(tǒng)的割膠程序主要分為“割膠”和“收膠”兩大部分,其中“割膠”是自動化裝置解決問題的重點(diǎn),也是設(shè)計(jì)機(jī)器人討論的重點(diǎn);“收膠”工序可由非熟練工人完成[7?8]。針對“割膠”工序,業(yè)界制定了一套開割標(biāo)準(zhǔn),針對割膠樹木要求、割膠面積規(guī)劃要求、切削深度與耗皮量要求,提出了理想割膠軌跡要求。
傳統(tǒng)割膠的切割軌跡反映在膠樹表面的是一段螺旋曲線,為了保證天然膠液能夠沿著這段螺旋曲線順利流到膠碗,該螺旋線的傾角是至關(guān)重要的,經(jīng)過長期實(shí)踐證明,采用陽線(25~30)°或者陰線(35~40)°的傾角范圍十分利于產(chǎn)膠。如果將膠樹看作一圓柱體,以徑圍50cm的膠樹作為分析對象,對采用陰陽切法獲得的軌跡進(jìn)行建模并分析,可得到相關(guān)理想狀態(tài)下的螺旋曲線:

式中:r—膠樹的半徑,2πr=50cm;h=7mm;θ—繞膠樹水平運(yùn)動的角度;α—螺旋線傾角。
上述式(1)~式(3)中可以看出各個(gè)方向上的分運(yùn)動相互關(guān)聯(lián),彼此約束,因此水平方向與豎直平面間的運(yùn)動受到同一因素影響,就不能做到相互獨(dú)立。若將兩運(yùn)動使用不同的動力源驅(qū)動,則可以實(shí)現(xiàn)彼此獨(dú)立的復(fù)合運(yùn)動。

式中:H—沿著膠樹軸向方向的距離。
將螺旋傾角取不同值代入MATLAB 中可以得到切割軌跡的近似三維曲線圖。在陽刀切法下傾角為25°的情況,如圖1所示。陰陽刀切法下的極限位置的螺旋軌跡圖,如圖2所示。
從圖1、圖2可知,形成螺旋曲線需兩個(gè)方向的分運(yùn)動組成,分運(yùn)動的動力源的區(qū)別又將影響形成的螺旋曲線。
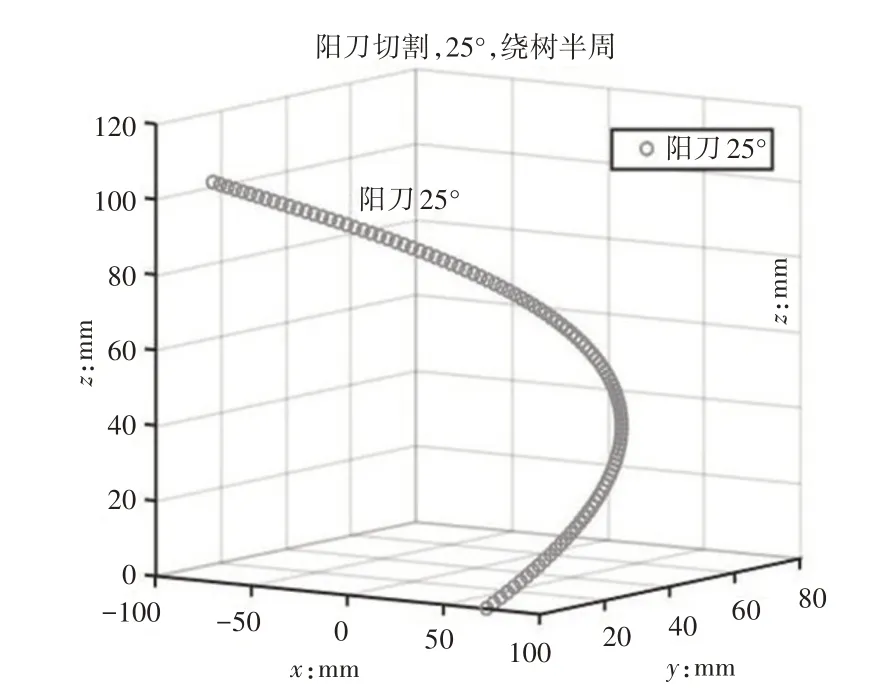
圖1 陽刀切法,25°傾角時(shí)螺旋軌跡圖Fig.1 Imperone Knife,Spiral Track Chart at 25?Degree Iinclination
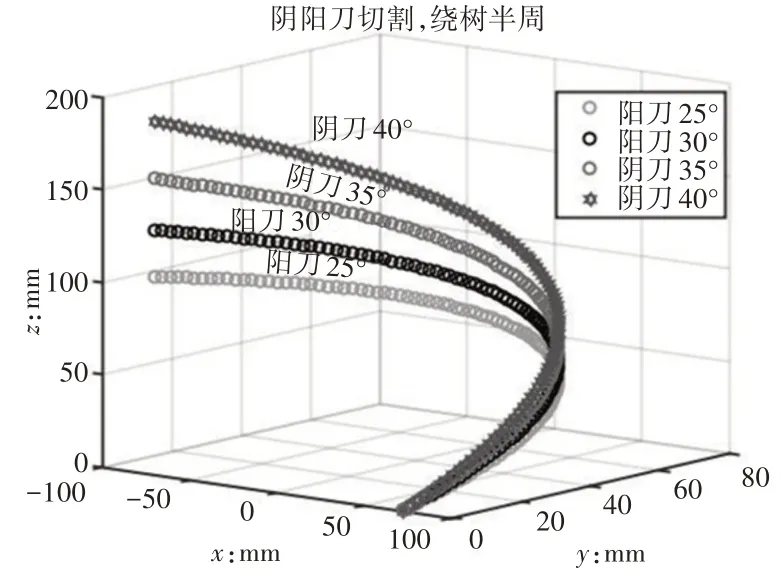
圖2 陰陽刀切法極限位置螺線軌跡圖Fig.2 Yin and Yang Knife Cut Limit Position Screw Track Map
2.2 機(jī)器人設(shè)計(jì)目標(biāo)
采用割刀“割膠”的過程要求十分苛刻,不僅要求能夠?qū)崿F(xiàn)特定的切割軌跡,還要求保證割槽的理想深度。通過膠林調(diào)研考察、查閱資料,在對傳統(tǒng)割膠工藝要求耗皮合理、深度適宜的基礎(chǔ)上,提出了便攜式自動割膠機(jī)器人的各項(xiàng)設(shè)計(jì)目標(biāo):
(1)割膠機(jī)器人結(jié)構(gòu)尺寸可調(diào),能夠可靠適應(yīng)不同樹徑的膠樹;
(2)裝拆方便、體積小、重量輕,便攜性能好;
(3)能耗低,工作時(shí)間長;
(4)切槽軌跡可擬合出膠效果最佳的膠槽軌跡,切割弧線角度、切割長度可調(diào);
(5)切割深度最優(yōu),自適應(yīng)于不同樹徑、不同樹皮結(jié)構(gòu)的各類膠樹[7];
根據(jù)這些目標(biāo),便攜式自動割膠機(jī)器人需突破以下三大難關(guān):
(1)自適應(yīng)不同樹徑膠樹;
(2)切割軌跡角度、長度可調(diào);
(3)切割深度可控。
3 機(jī)器人的結(jié)構(gòu)設(shè)計(jì)
針對傳統(tǒng)割膠作業(yè)的特點(diǎn),制定出機(jī)器割膠需要滿足的功能,并選定了安裝快捷穩(wěn)定,自適應(yīng)性強(qiáng)、切割軌跡多樣、切割深度可控的便攜式割膠機(jī)器人的設(shè)計(jì)方案,這個(gè)方案的合理性在于其結(jié)構(gòu)的巧妙布局,機(jī)械結(jié)構(gòu)的精巧為割膠功能的實(shí)現(xiàn)奠定了基礎(chǔ)。便攜式自動割膠機(jī)器人的三維模型,如圖3所示。
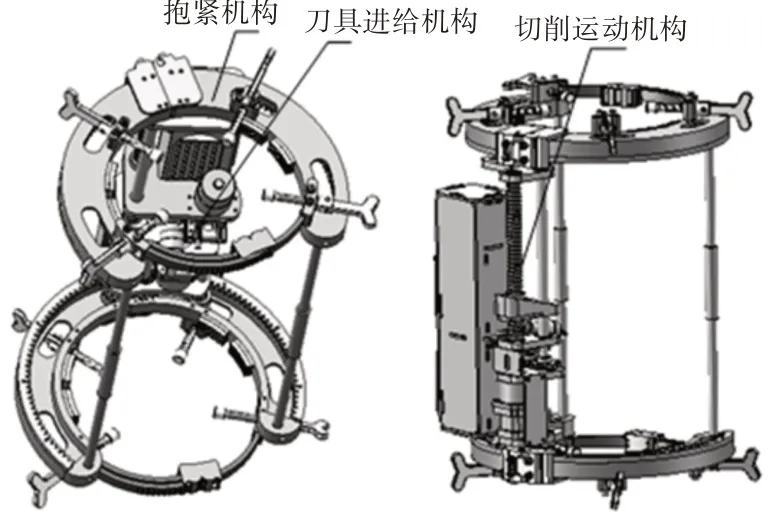
圖3 便攜式自動割膠機(jī)器人三維模型圖Fig.3 3D Model Diagram of Portable Automatic Glue?Cutting Cobot
機(jī)器人主要分為三個(gè)機(jī)構(gòu),分別為抱緊機(jī)構(gòu)、刀具進(jìn)給機(jī)構(gòu)和切削運(yùn)動機(jī)構(gòu),通過這些結(jié)構(gòu)的設(shè)計(jì)布局,完成割膠的一系列工作。
3.1 抱緊機(jī)構(gòu)設(shè)計(jì)
抱緊機(jī)構(gòu)采用扎帶的反搭扣設(shè)計(jì),利用彈簧墊填充增加摩擦力的方式,確定了抱緊機(jī)構(gòu)對膠樹的大范圍適應(yīng)性。抱緊機(jī)構(gòu)主要由定位螺釘、圓弧軌道、圓弧齒條、支撐桿組成,采用240°的優(yōu)弧軌道設(shè)計(jì),采用這種加大角度的圓弧軌道,能夠避免在機(jī)構(gòu)運(yùn)動中無法達(dá)到180°的水平切割運(yùn)動的約束。圓弧軌道內(nèi)側(cè)半徑選擇20cm,保證與樹徑之間的空間,保證刀具切割的完成。
由于便攜式自動割膠機(jī)器人要滿足對膠樹有較好的適應(yīng)性,優(yōu)弧軌道端口間的距離為l=200cos30°=173mm,當(dāng)樹木的徑圍大于優(yōu)弧的端口距離時(shí)無法完成安裝,故采用開合鉸鏈,將圓弧優(yōu)弧軌道均分為兩劣弧軌道,用彈簧連接兩劣弧軌道,通過調(diào)節(jié)螺帽的松緊控制彈簧,從而保證裝夾的穩(wěn)定性[9?10],如圖4所示。同時(shí)針對膠樹截面的不規(guī)則性,為保證裝夾機(jī)構(gòu)與膠樹同心,采用抱緊機(jī)構(gòu)中定位塊與定位螺釘相配合,實(shí)現(xiàn)四點(diǎn)定心。
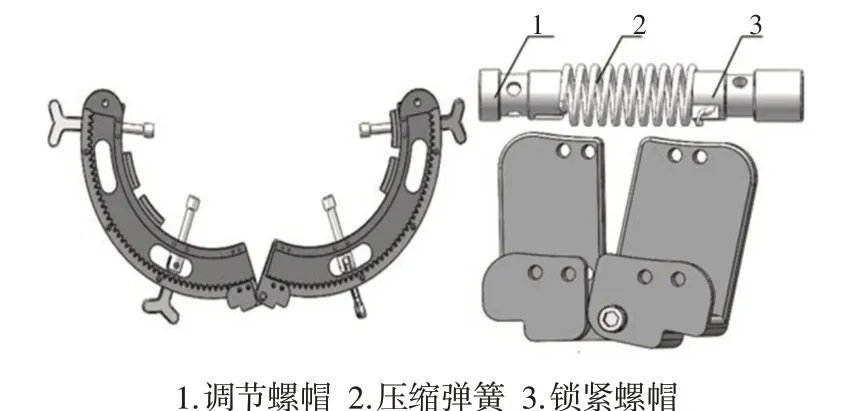
圖4 便攜式自動割膠機(jī)器人開合鉸鏈模型Fig.4 Open?Close Hinge Model for Portable Automatic Glue?Cutting Robot
自動割膠機(jī)器人的運(yùn)動功能實(shí)現(xiàn)式依賴機(jī)器人在膠樹上完成穩(wěn)定裝夾,提供了穩(wěn)定的割膠作業(yè)平臺,能夠提高割膠效率,減少機(jī)器人操作失誤。
3.2 刀具進(jìn)給機(jī)構(gòu)
便攜式自動割膠機(jī)器人刀具進(jìn)給機(jī)構(gòu),如圖5所示。主要由絲杠螺母座、刀具進(jìn)給箱、刀頭伸縮桿、移動斜塊等零部件組成。電機(jī)帶動螺紋桿旋轉(zhuǎn),通過控制電機(jī)的旋轉(zhuǎn)圈數(shù)來控制螺紋桿上的移動斜塊的直線運(yùn)動距離。
道具進(jìn)給機(jī)構(gòu)的實(shí)現(xiàn)的運(yùn)動功能主要是實(shí)現(xiàn)刀頭進(jìn)入樹皮,并完成對進(jìn)入深度的精準(zhǔn)控制,保證產(chǎn)量,減少對膠樹的傷害。如圖5所示。電機(jī)旋轉(zhuǎn)(1)帶動螺紋桿(4)轉(zhuǎn)動,移動斜塊(5)隨之往下運(yùn)動施加作用力于刀具伸縮塊(8),當(dāng)?shù)额^伸縮塊(8)受到移動斜塊(5)在伸縮塊斜面的分力大于彈簧柱(10)的彈簧力的時(shí)候開始壓縮彈簧,此時(shí)彈簧柱給伸縮塊一反向作用力減緩刀具的進(jìn)給速度,因?yàn)殡姍C(jī)的力絕對大于彈簧力,所以伸縮塊是實(shí)現(xiàn)伸縮,當(dāng)進(jìn)給后完成切割工作之后,電機(jī)停止轉(zhuǎn)動,已壓縮的彈簧產(chǎn)生彈力將伸縮塊送回,實(shí)現(xiàn)收刀動作。
3.3 切削運(yùn)動機(jī)構(gòu)設(shè)計(jì)
為保證在膠樹圓周上的切割軌跡在不同徑圍、不同截面形狀的膠樹上都能實(shí)現(xiàn)切割軌跡的穩(wěn)定性,要求便攜式自動割膠機(jī)器人的切割軌跡具有可調(diào)性。切割運(yùn)動可以被分為周向運(yùn)動與軸向運(yùn)動,若兩運(yùn)動相互關(guān)聯(lián),如式(1)~式(3)運(yùn)動軌跡會單一,并不能滿足適應(yīng)性要求,要實(shí)現(xiàn)式(4)~式(6)的效果,采用兩個(gè)電機(jī)使周向運(yùn)動與軸向運(yùn)動相互獨(dú)立,只需要控制好兩電機(jī)的同步運(yùn)動即可。電機(jī)的布局思路,如圖6所示。垂直放置節(jié)約空間,錯開距離方便其他控件的安裝。

圖6 切削運(yùn)動機(jī)構(gòu)電機(jī)布局思路Fig.6 Cutting Motion Mechanism Motor Layout Ideas
便攜式自動割膠機(jī)器人切削運(yùn)動機(jī)構(gòu),如圖7所示。軸向運(yùn)動采用滾珠絲杠完成直線運(yùn)動,減少運(yùn)動抖動,保證運(yùn)動精度。圓周運(yùn)動采用齒輪傳動保證傳動的平穩(wěn)與膠樹的切割。
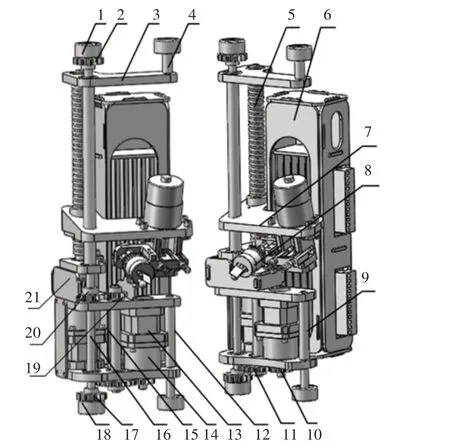
圖7 便攜式自動割膠機(jī)器人切削運(yùn)動機(jī)構(gòu)Fig.7 Cutting Motion Mechanism for Portable Automatic Glue?Cutting Robot
便攜式自動割膠機(jī)器人的切削進(jìn)給運(yùn)動功能要求完成繞膠樹表面的弧線。圖圓周運(yùn)動是步進(jìn)電機(jī)搭載減速器(15)帶動電機(jī)上的主動齒輪(10)旋轉(zhuǎn),主動齒輪(10)與傳動齒輪(11)嚙合帶動中間軸(15)轉(zhuǎn)動,同時(shí)二級嚙合齒輪1(19)開始旋轉(zhuǎn)帶動二級嚙合齒輪2(20)轉(zhuǎn)動,二級嚙合齒輪是用鍵與銷釘與傳動軸相連,保證了運(yùn)動同步,電機(jī)通過二級齒輪傳動帶動軸端嚙合齒輪旋轉(zhuǎn),開始圓周運(yùn)動。直線運(yùn)動由另一電機(jī)搭配減速器帶動絲杠軸轉(zhuǎn)動實(shí)現(xiàn)。兩運(yùn)動相互獨(dú)立實(shí)現(xiàn)了切割軌跡的多樣性。
4 機(jī)器人的控制系統(tǒng)設(shè)計(jì)
便攜式自動割膠機(jī)器人主要包括抱緊機(jī)構(gòu)、切削進(jìn)給機(jī)構(gòu)與刀具進(jìn)給機(jī)構(gòu),其中抱緊機(jī)構(gòu)采用人工安裝,其余兩部分則需要由電機(jī)完成驅(qū)動。
控制系統(tǒng),如圖8所示。切削進(jìn)給機(jī)構(gòu)中的兩個(gè)電機(jī)分別完成滾珠絲杠的直線運(yùn)動與齒輪傳動的圓周運(yùn)動,這兩個(gè)運(yùn)動要求同時(shí)起步,分別控制。刀具進(jìn)給機(jī)構(gòu)需要控制電機(jī),保證割膠作業(yè)的切割深度與耗皮量適當(dāng)。
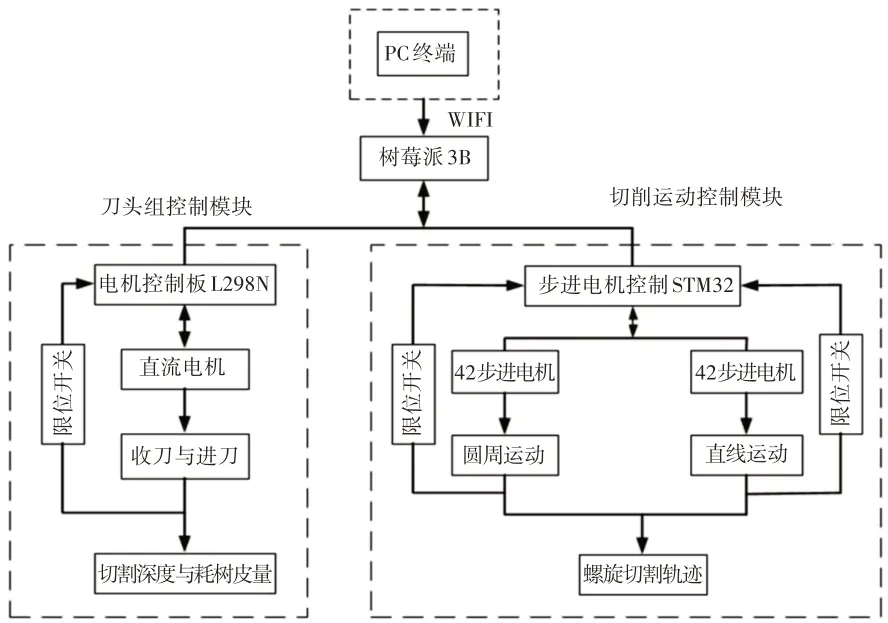
圖8 便攜式自動割膠機(jī)器人控制系統(tǒng)框架Fig.8 System Framework for Portable Automatic Glue?Cutting Robot
只要三個(gè)電機(jī)實(shí)現(xiàn)彼此配合,就能達(dá)到理想的切割螺旋軌跡。在已確定便攜式自動割膠機(jī)器人的相關(guān)結(jié)構(gòu)尺寸后,依據(jù)功能需求選用分布式的控制系統(tǒng)框架,并對相應(yīng)的硬件進(jìn)行選型與空間布局。為控制刀具進(jìn)刀與收刀,采用直流電機(jī)控制器單獨(dú)控制。而切削運(yùn)動采用STM32主控板控制兩個(gè)步進(jìn)電機(jī),保證周向運(yùn)動與軸向運(yùn)動的同步性,電機(jī)的配置[11?12],如表1所示。通過樹莓派3B完成主控制,為底層驅(qū)動板實(shí)現(xiàn)刀具進(jìn)給與切削運(yùn)動發(fā)送指令的功能。樹莓派作為主控元件,還可以適用于不同的控制場景,并且設(shè)有USB與以太接口,可以實(shí)現(xiàn)刀具的進(jìn)刀與切割的遠(yuǎn)程控制,方便割膠作業(yè),節(jié)約作業(yè)時(shí)間。
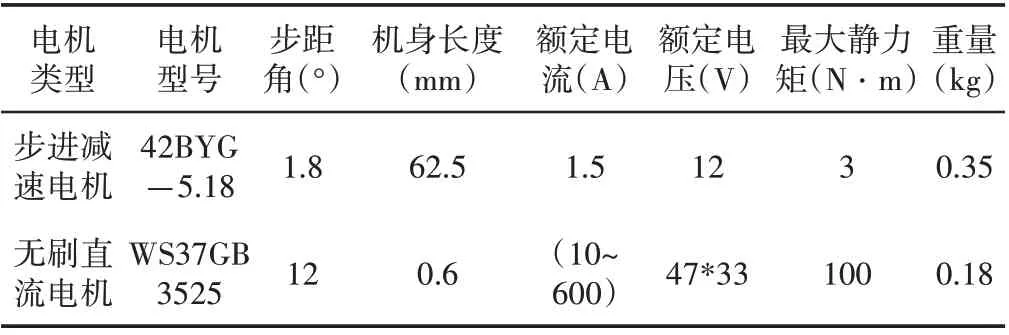
表1 便攜式自動割膠機(jī)器人電機(jī)參數(shù)Tab.1 Portable Automatic Glue-Cutting Robot Motor Parameters
便攜式自動割膠機(jī)器人運(yùn)行過程需要對三個(gè)運(yùn)動控制進(jìn)行供電,這三部分運(yùn)動的控制器件主要包括兩個(gè)42步進(jìn)電機(jī)、對應(yīng)的步進(jìn)電機(jī)驅(qū)動器、37直流無刷電機(jī)、控制板L298N、STM32控制板、樹莓派3B以及接近開關(guān),考慮到便攜式自動割膠機(jī)器人在膠林里需要長時(shí)間使用,充電不便等因素,選用8400mAh的電池與2400mAh的電池,大電量的控制電機(jī)的運(yùn)動,小電量的用于啟動控制板,避免在接線時(shí)意外通電的情況,在電源輸出端連接一開關(guān)用于控制電壓的輸出。
4.1 切割軌跡控制模塊
為保證圓周運(yùn)動與絲杠運(yùn)動的同步性,選用STM32F103作為主控芯片進(jìn)行電路設(shè)計(jì)。考慮到42 步進(jìn)電機(jī)額定電壓與STM322的工作電壓,選用12V的鋰電池作為供電電源,并使用穩(wěn)壓元件LM2596與SP6205完成降壓電路的設(shè)計(jì),其中LM2596負(fù)責(zé)將電壓從12V降至5V,SP6205負(fù)責(zé)將電壓從5V降至3.3V,這樣的兩級降壓電路能保證電源電壓的穩(wěn)定性與相關(guān)芯片的散熱。
通過以上的電路原理圖的設(shè)計(jì),用Altium Designer進(jìn)行電路PCB的電路板設(shè)計(jì),用的是雙層板與雙層布線的設(shè)計(jì)。設(shè)計(jì)完之后選擇相應(yīng)的元器件進(jìn)行焊接,并對其整個(gè)電路板的硬件進(jìn)行測試,最終得到的PCB板與實(shí)物電路圖,如圖9所示。為保證切削運(yùn)動與圓周運(yùn)動的距離,在切削運(yùn)動的首尾兩端還安裝了限位開關(guān)。
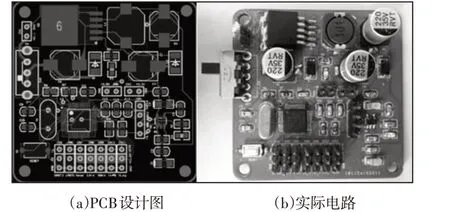
圖9 便攜式自動割膠機(jī)器人切割軌跡控制電路Fig.9 Track Control Circuit for Portable Automatic Glue?Cutting Rrobot
4.2 道具進(jìn)給控制模塊
控制刀具進(jìn)給機(jī)構(gòu)主要需要做到對進(jìn)刀和收刀的控制,故電機(jī)需要做到有足夠大的力使刀具扎入樹皮,同時(shí)保持速度防止切割深度過深,也要避免斷開電機(jī)時(shí)刀具的碰撞與變形。再加上空間布局的限制,要求電機(jī)的體積小、質(zhì)量輕、力矩大,通過電機(jī)的正反轉(zhuǎn)實(shí)現(xiàn)進(jìn)刀與收刀,綜合上述因素選擇了37直流無刷電機(jī),具體參數(shù),如表1所示。刀具進(jìn)給運(yùn)動電機(jī)的控制器選用L298控制板器。
5 實(shí)物樣機(jī)實(shí)驗(yàn)與結(jié)果分析
根據(jù)上述機(jī)構(gòu)設(shè)計(jì)與控制系統(tǒng)的設(shè)計(jì),最終加工制造,并裝配調(diào)試完成后的樣機(jī),如圖10所示。其中齒輪與滾珠采用的是45號鋼,滾珠絲杠軸的材質(zhì)是S45C,絲杠螺母的材質(zhì)是C6782,刀具選用的是高碳素鋼,查閱相關(guān)資料可以得到45號鋼與S45C的最大屈服應(yīng)力為600MPa,C6782的最大屈服應(yīng)力為530MPa。完成了樣機(jī)之后,利用樣機(jī)在實(shí)際膠林環(huán)境中進(jìn)行了割膠工作,通過實(shí)驗(yàn)檢驗(yàn)機(jī)器人的性能。
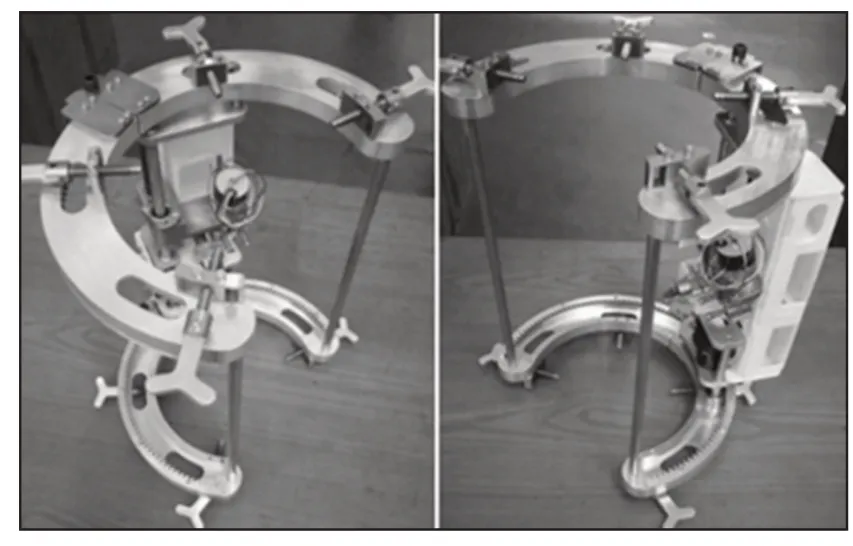
圖10 便攜式自動割膠機(jī)器人實(shí)物樣機(jī)Fig.10 Prototype of Portable Automatic Glue?Cutting Robot
5.1 實(shí)驗(yàn)?zāi)繕?biāo)與步驟
本次實(shí)驗(yàn)的目的是驗(yàn)證便攜式自動割膠機(jī)器人的功能完備性與結(jié)構(gòu)的穩(wěn)定性。具體的實(shí)驗(yàn)步驟為:(1)在膠林中選定可以開割的膠樹;(2)安裝便攜式割膠機(jī);(3)開始切割實(shí)驗(yàn);(4)測量記錄切割傾角、切割時(shí)間、切割深度;觀測裝置運(yùn)行的穩(wěn)定性。
5.2 實(shí)驗(yàn)結(jié)果與分析
實(shí)驗(yàn)選在海南的膠林里進(jìn)行,使用樣機(jī)在膠林內(nèi)的普通膠樹上進(jìn)行割膠工作。樣機(jī)進(jìn)行現(xiàn)場實(shí)驗(yàn)時(shí)完成裝夾后的切割工作狀態(tài),如圖11所示。從圖中可以看出抱緊機(jī)構(gòu)工作狀態(tài)良好,可以順利的完成與截面為不規(guī)則圓形的膠樹的同心,穩(wěn)定性較好。將便攜式自動割膠機(jī)器人在不同的滿足割膠行業(yè)標(biāo)準(zhǔn)的膠樹上進(jìn)行實(shí)驗(yàn),實(shí)驗(yàn)的切割軌跡的痕跡,如圖12所示。

圖11 便攜式自動割膠機(jī)器人樣機(jī)實(shí)驗(yàn)圖Fig.11 Prototype Periment of Portable Automatic Glue?Cutting Robot
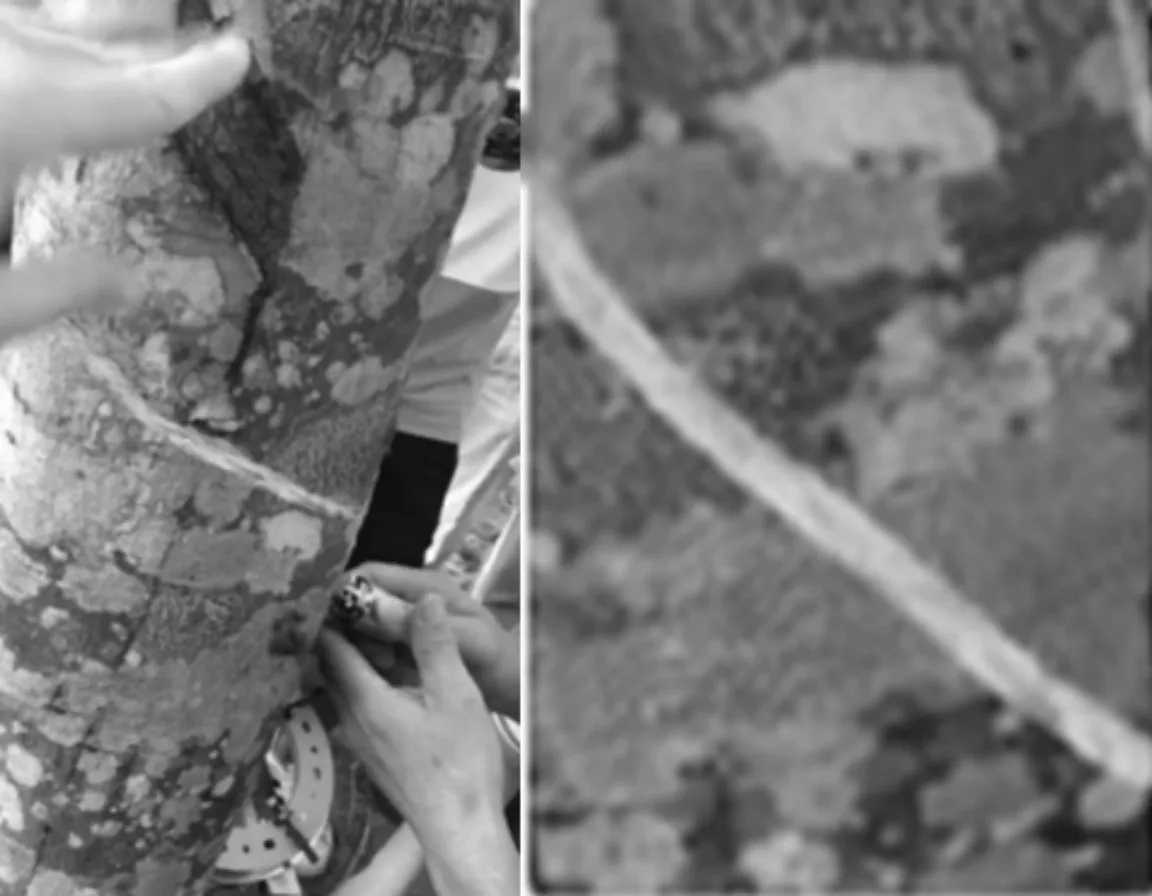
圖12 便攜式自動割膠機(jī)器人切割軌跡痕跡Fig.12 Traces of the Cut Trajectory of Portable Automatic Glue?Cutting Robot
通過對切割傾角、切割時(shí)間、切割深度進(jìn)行記錄可以得到以下結(jié)果:
(1)通過現(xiàn)場的測量,不同速度下可得切割軌跡的傾角最大可以達(dá)到42°左右,滿足機(jī)器切割軌跡多樣化的需求。
(2)切割長度最大可以覆蓋膠樹的半個(gè)徑圍,滿足對切割長度可調(diào)的需求。
(3)通過調(diào)節(jié)刀頭可以得到不同深度的切割軌跡,此時(shí)測量所得軌跡的深度不完全一致,最深處為7.5mm左右,最淺處在6.4 mm左右,誤差控制在1.1mm。
(4)切割時(shí)間大概在20s左右,所提供的電源能滿足機(jī)器的能耗持久的功能。
結(jié)果(3)中的誤差是因?yàn)樵趯?shí)驗(yàn)過程中便攜式自動割膠機(jī)器人存在輕微的振動,導(dǎo)致切割軌跡有些許毛刺。
通過實(shí)驗(yàn)的數(shù)據(jù)結(jié)果與圖片,我們可以看出實(shí)驗(yàn)效果令人滿意,機(jī)器能穩(wěn)定裝夾,也能基本實(shí)現(xiàn)它的切割功能。
6 結(jié)束語
詳細(xì)闡述了便攜式自動割膠機(jī)器人的樣機(jī)系統(tǒng),對機(jī)械結(jié)構(gòu)的設(shè)計(jì)與布局,控制系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)進(jìn)行了細(xì)致說明,并且利用樣機(jī)進(jìn)行了現(xiàn)場割膠驗(yàn)證實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果證明,設(shè)計(jì)的便攜式自動割膠機(jī)器人結(jié)構(gòu)尺寸可調(diào)、切割軌跡多樣、切割深度可控,可以用于膠林進(jìn)行膠樹切割作業(yè),減輕了膠農(nóng)負(fù)擔(dān),提高了割膠效率。
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
