電容式靜力水準系統的研制及測試
2022-12-28 11:20:36李朝陽湯建軍亓信同
中國新技術新產品 2022年19期
李朝陽 湯建軍 亓信同 朱 瑞 孫 彬
(安徽創譜儀器科技有限公司,安徽 合肥 230088)
0 引言
靜力水準系統是根據液體總是尋求等勢面的水平原理監測若干不同位置之間的相對高程變化量的精密儀器,廣泛應用于各項工程中。電容式靜力水準系統是一種高精度高程測量系統[1],其測量精度、反應頻率以及自動化程度比其他高程測量方法高,且適用于各種狹小的空間和惡劣環境[2]。該文面向大科學裝置(例如高能粒子加速器中垂直位置變化的高精度監測需求)研制了電容式靜力水準系統,并對其進行指標驗證、標定試驗以及在線長時間試驗驗證。
1 儀器介紹
該文介紹的電容式靜力水準系統是從厚膜陶瓷電容傳感器、測量與控制系統電子學和樣機結構3個方面完成設計的,分為全浸式和半浸式,該文設計的全浸式和半浸式靜力水準儀的設計結構圖如圖1所示。系統結構主要由上缽體、電容傳感器和下缽體組成。上缽體主要由靶標球座、控制電路板、網口接口和電源等通信接口組成;中間是電容傳感器及其采集電路;下缽體用于盛液位,主要由空氣管和水管組成;最下方是用于固定的底座。

圖1 靜力水準系統結構
高精度電容式靜力水準系統設計技術指標見表1。
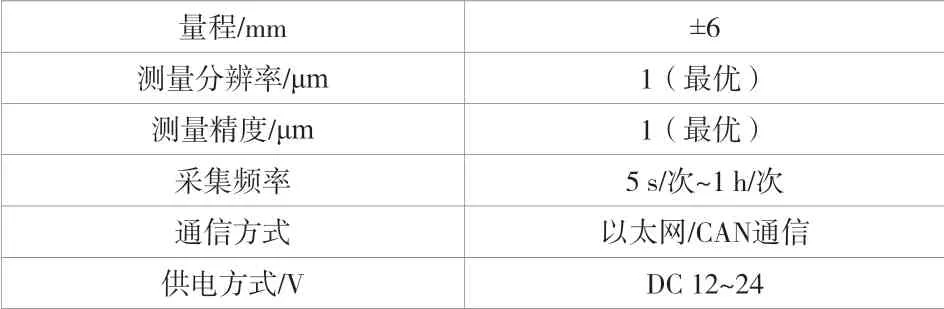
表1 靜力水準系統技術指標
2 離線測試
2.1 試驗裝置
該文研制的電容式靜力水準系統的量程為±6.0 mm,期望最高精度為1 μm,作為測量系統的標定平臺,應該擁有更高的精度、分辨力和量程。因此,該文設計了適用于靜力水準系統的試驗裝置。測試試驗裝置由電容式靜力水準系統、相同底面積的標定缽體、自研位移裝置、連接水管、升降臺和大理石平臺共同組成,如圖2所示。其中,自研位移裝置具有60 mm的測量量程和1 μm的位移精度,滿足測試試驗的精度和量程要求。
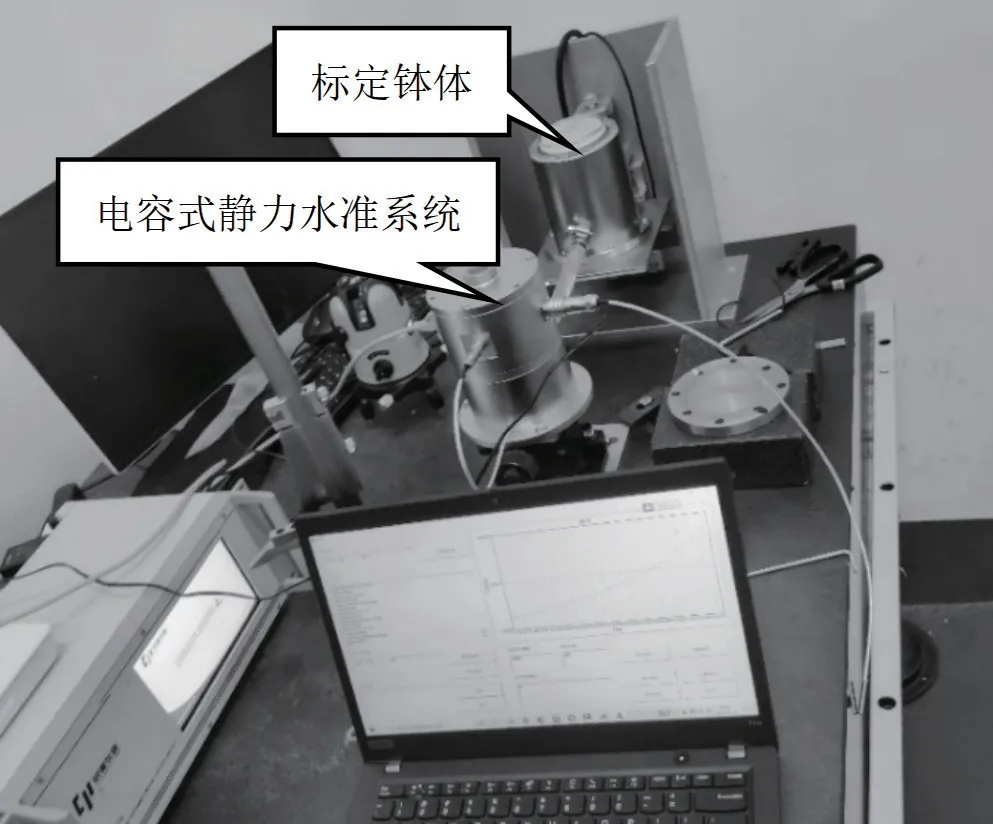
圖2 測試試驗裝置
試驗采用間接標定方法,共分為2個步驟:1) 利用自研位移裝置產生?H位移值,根據連通器原理,則靜力水準系統中下缽體的液位變化為?H/2。同時,利用基恩士激光位移傳感器對液位量進行標定和驗證。2) 將位移裝置調節至不同的位移刻度,多次采集靜力水準系統在不同位移刻度下的電容量數據,對其電容量數據進行標定。在完成上述2個步驟后,就可以得到1組標定后的對應電容—位移數據。
通過聯通器原理在左、右液體容器內注入同一種液體,在同一大氣壓下,各位置液體壓強相同,因此液面始終保持在同一水平面,通過改變相應缽體的高程并通過傳感器測得液位變化。標定液位變化量原理如圖3所示。
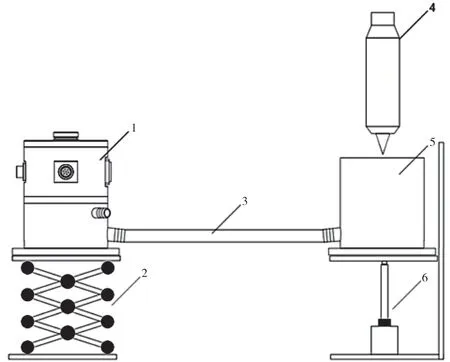
圖3 標定液位變化量原理
為了驗證靜力水準系統的技術指標,該文基于測試試驗裝置進行分辨率試驗、重復性試驗、標定及線性度試驗和長時間觀測試驗。
2.2 分辨率試驗
由電容傳感器間隙距離和電容值的公式可知,隨著間隙距離不斷變小,電容檢測單位間隙位移變化的分辨率越來越高,該試驗設置靜力水準系統內液位以1 μm為間隙位移變化量,由+5.5 mm的初始位置上漲至+6.0 mm,反復試驗多次,同步記錄每個位移點對應的電容值。其中一組電容值隨位移量變化圖和局部放大圖如圖4所示,電容值呈階梯式增長,符合公式規律,且滿足分辨率為1 μm的要求。
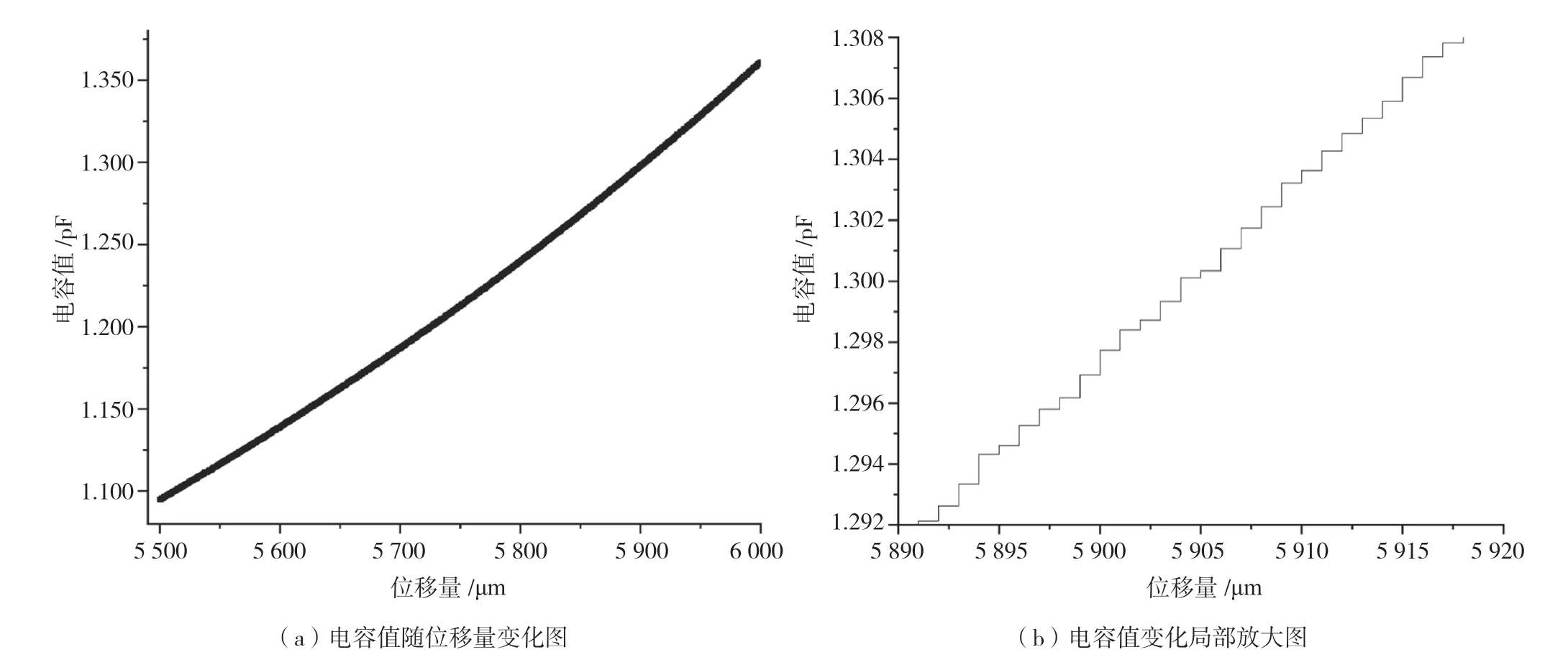
圖4 電容值隨位移量變化圖及局部放大圖
2.3 重復性試驗
為了驗證系統的重復性,使靜力水準系統液位從+6.0 mm降至-6.0 mm,每次變化量為l.0 mm,記錄測量結果,再使液位從-6.0 mm升至+6.0 mm,同樣記錄測量結果。在很短的時間內共進行了5次試驗,測量數據平均值和極差如圖5所示。
重復性試驗測量的每個點數據均有跳動,這里歸結為重復性誤差。由圖5可知,對重復性測量的每個點的平均值來說,其極差是很小的,最大點的偏差為0.26%。
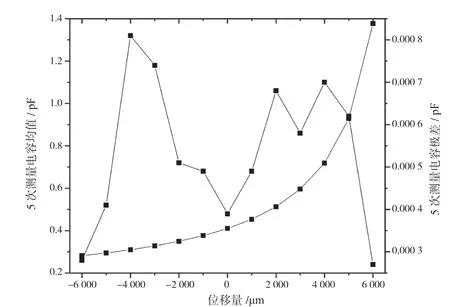
圖5 5次測量數據的平均值和極差
2.4 標定與線性度試驗
標定試驗中的系統以20 μm為液位步進變化量,使液位由+6.0 mm的初始位置降至-6.0 mm,同步記錄每個位移點對應的電容值,電容值與位移量關系如圖6所示(為全行程的電容與液位的擬合曲線)。
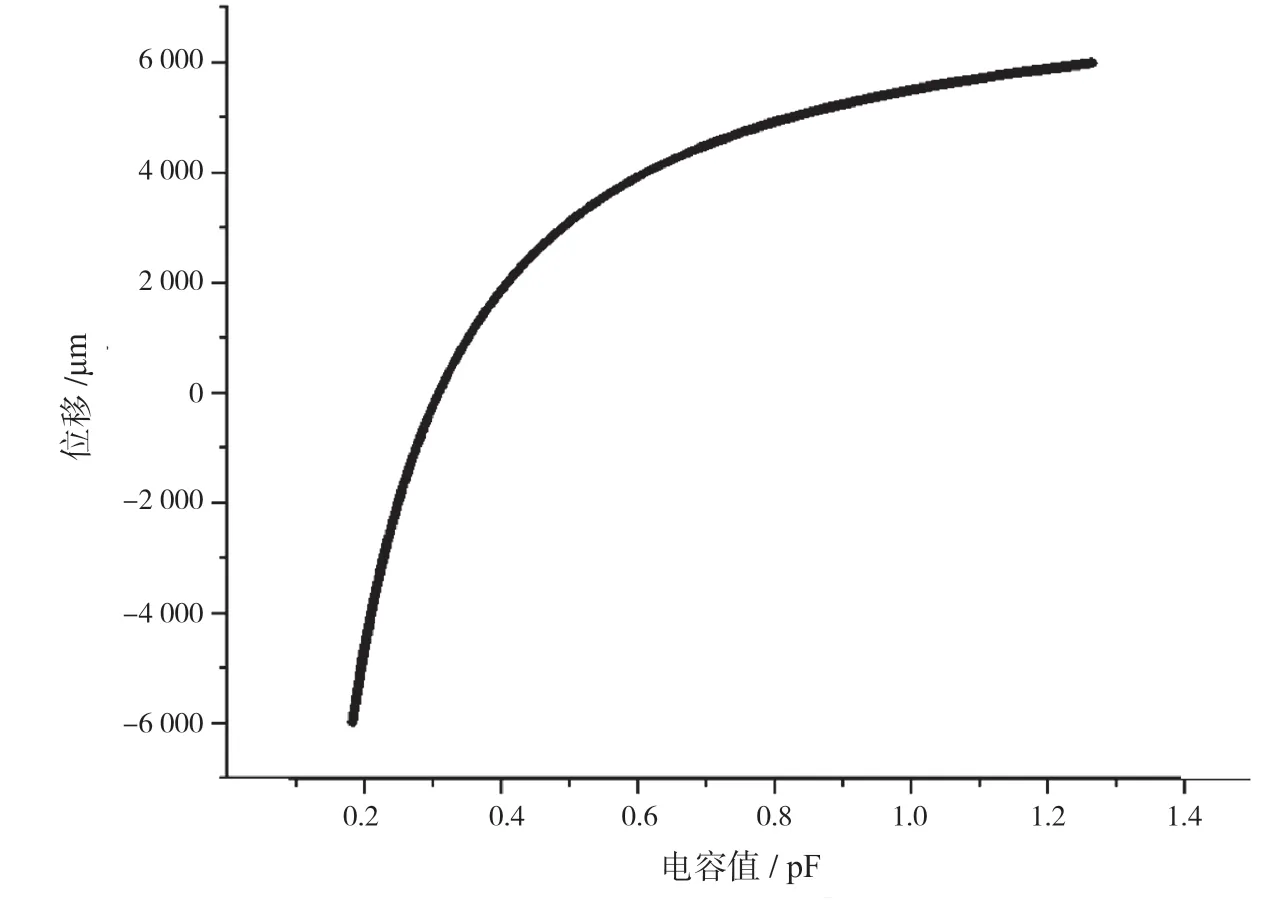
圖6 電容與位移量關系曲線
對測量數據進行非線性曲線擬合[3],擬合曲線與標定誤差如圖7所示。
擬合非線性公式如公式(1)所示。

式中:y為液位高度;a、b、c和d為擬合后的常數;x為電容值。
擬合系數a=27677.3,b=-67744.3,c=-8.59993,d=-0.0296,曲線擬合的最大殘差出現在-6 000 μm的位置,為25.12 μm,后期可采用分段擬合的方法進一步提高擬合精度。
靜力水準線性度是測量系統輸出位移值和標定位移值的最大偏差與滿量程的百分比,其值越小,表明線性特性越好。將標定過后得到的4個系數(a、b、c和d)代入標定公式,當液位為+6.0 mm~-6.0 mm時,使缽體內液位每次變化為1.0 mm,將標定位移值與實際測量位移值進行數據對比。試驗共進行10次測量,隨機選取其中一次試驗的對比數據與非線性誤差分別如圖8所示。
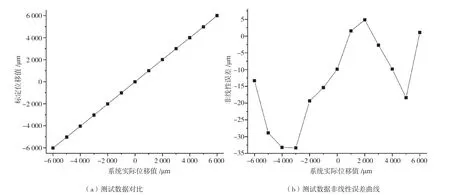
圖8 測試數據圖
由圖7(b)可知,在同次試驗中,系統在對應位移刻度下的非線性誤差有所差異。在線性度試驗的10次測量過程中,系統在不同測量中的同一位移刻度下的非線性誤差也有所差異。其中,系統在±6.0 mm量程內的最大非線性誤差為54.67 μm,線性度如公式(2)所示[4]。
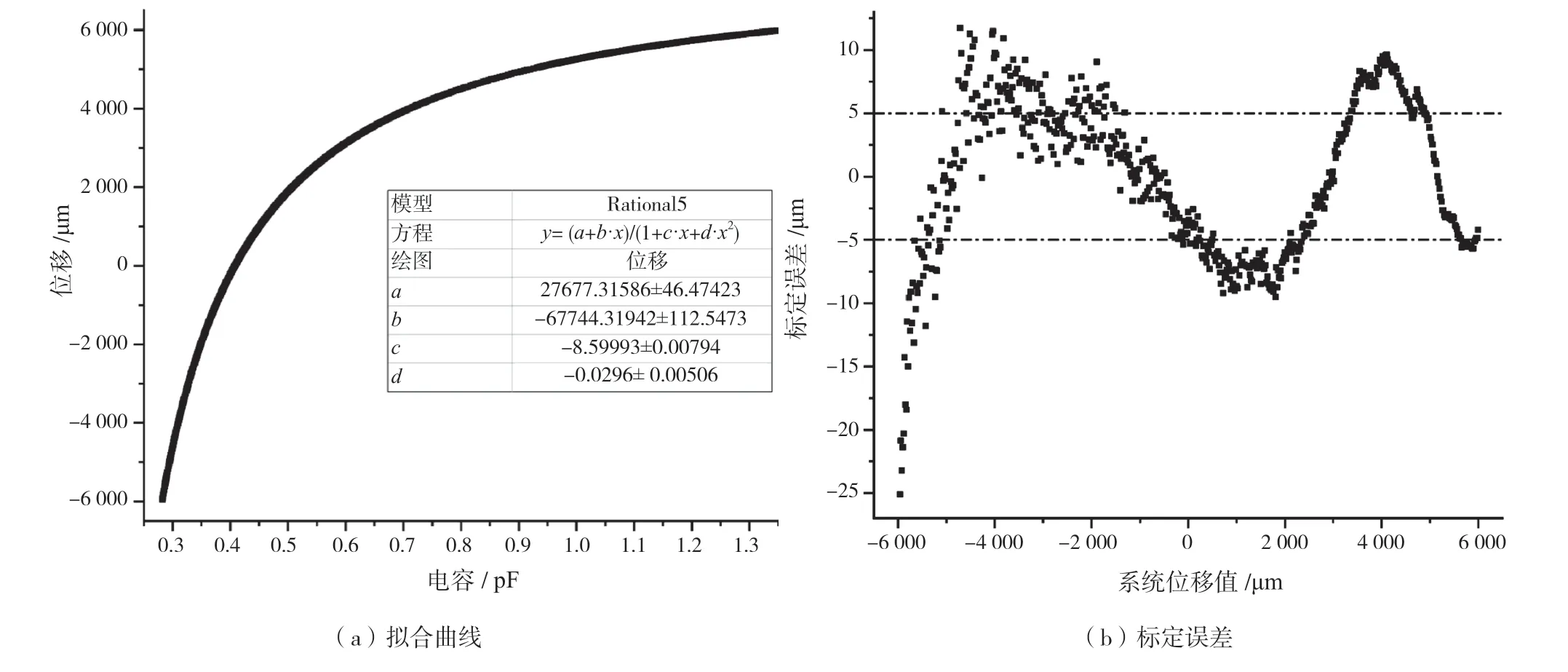
圖7 靜力水準儀標定及精度數據分析圖

式中:?lmax為最大非線性誤差;yFS為系統滿量程輸出。
由公式(2)可以得到測量系統的線性度約為0.45%。
2.5 長時間監測試驗
靜力水準系統進行長時間監測試驗,在缽體內將水大約加至+500 μm的位置,保持其他測量條件不變,對該位置的液位值和溫度值進行持續測量,每間隔5 min讀取1次,觀測36 h的結果如圖9所示。
圖9中的液位波動極值為29.37 μm,與溫度變化趨勢一致。因此,液位波動與溫度變化密切相關,須加入溫度補償[1]。
該文研制的電容式靜力水準系統在每個缽體中都安裝了PT100溫度傳感器,系統同時采集液位值和缽體對應的溫度值,利用溫度補償公式對監測液位進行修正,消除溫度干擾因素,進一步提高精度[5]。對長期監測結果進行溫度補償,校正前后液位對例如圖9所示。由圖9可知,校正后液位波動明顯變小,極差為14.82 μm,由于去離子水長時間存在蒸發現象,因此水位呈下降趨勢。
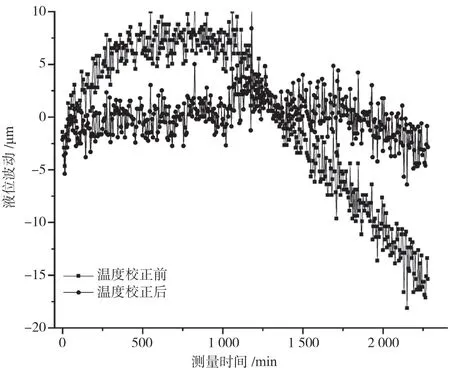
圖9 靜力水準溫度矯正算法的長時間監測數據圖
3 在線測試
將研制的測量系統安裝在設備現場進行長時間測試,并對測試數據進行對比。在試驗中,0#和1#為一組,固定在設備上進行測試,而2#和3#固定在光學平臺上進行測試,連續測試12 h,再對比測試結果。
系統在線安裝在散列中子源準直實驗室中,安裝結構示意圖及現場安裝實景圖如圖10所示。
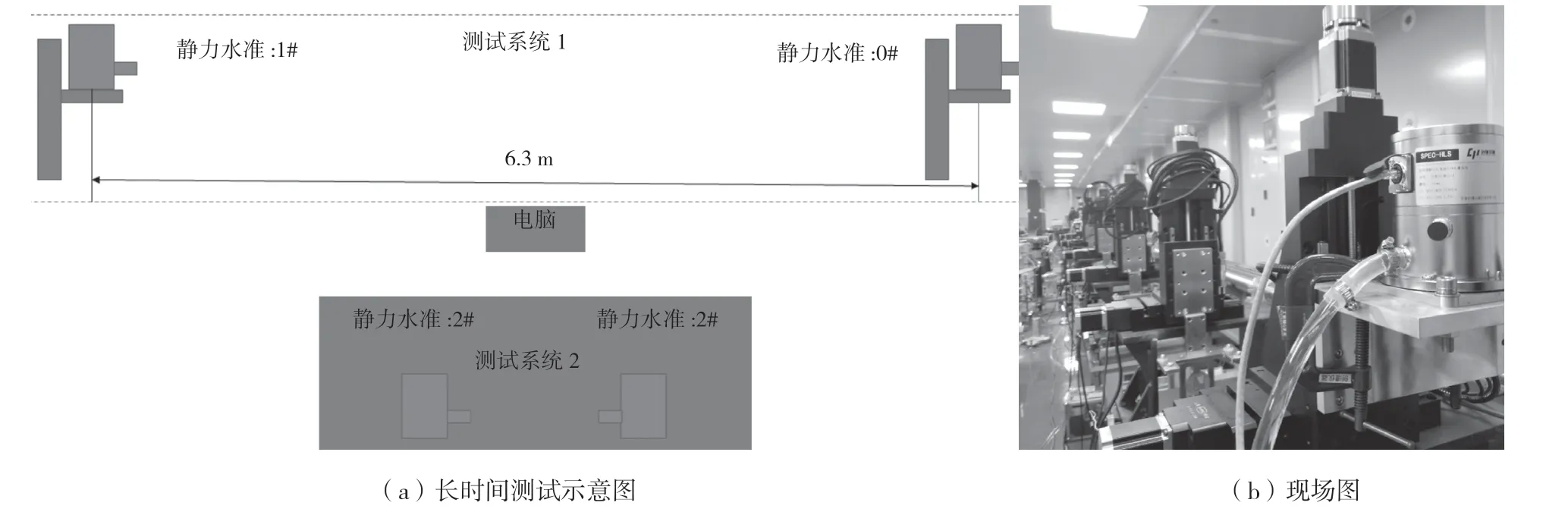
圖10 散列中子源現場測試圖
長時間測試結果如圖11所示,圖11(a)為原始數據,1#和2#固定在懸臂機構上,隨溫度的變化,系統相對位置也會發生變化。而0#和3#固定在光學平臺上,隨溫度的變化,系統相對位置固定不變,結果和實際測量數據非常溫和。
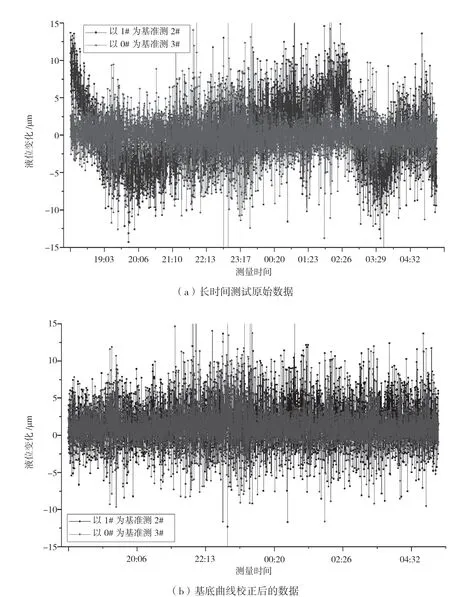
圖11 數據處理對比圖
對原始數據進行本底數據校正,矯正后的本底數據可以消除因環境變化因素而導致的測量位置偏差,可以將校正過后的數據看作儀器的本身精度(圖12)。長時間測試結果表明,儀器的結構可以達到5 μm。
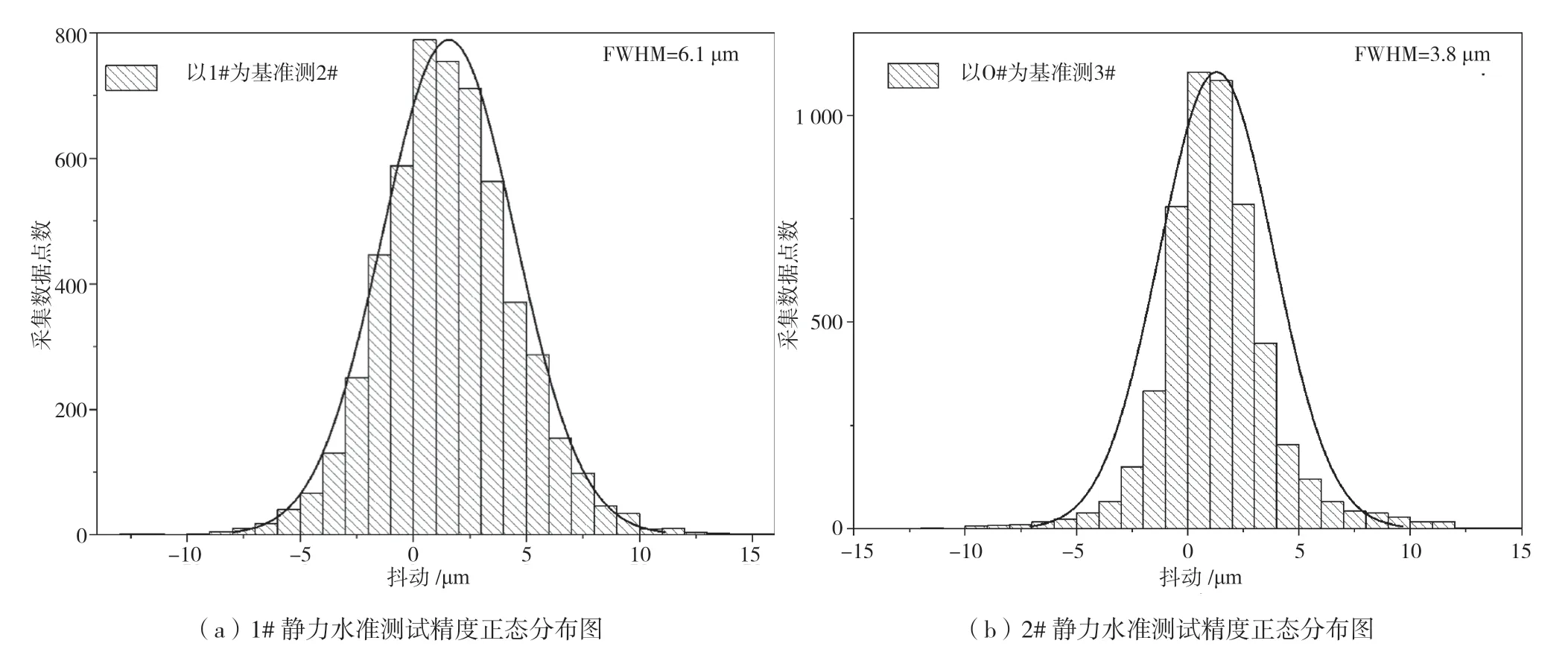
圖12 長時間測試確認儀器精度
4 結語
電容式靜力水準系統具有精度高、自動化性能好和實時測量功能等特點,可以滿足大型科學科研工程中垂直位置變化的高精度監測需求。首先,該文對自研的高精度電容式靜力水準系統進行指標驗證試驗,相關試驗結果表明,靜力水準系統在5500μm~6000μm的分辨率可達1 μm,±6.0 mm量程范圍內重復性高于0.26%。其次,系統進行了電容—位移標定試驗,對標定數據曲線進行非線性擬合,擬合最大誤差為25.12 μm,后期計劃采用分段擬合的方法進一步提高擬合精度。將標定得到系數后的標定公式帶到液位計算,通過測量的電容值計算液位值,驗證線性度指標高于0.45%。最后,靜力水準系統進行長時間監測試驗,36 h內液位波動極值為29.37 μm,且數據顯示液位波動與溫度變化密切相關。對監測液位進行溫度補償,校正后液位波動明顯變小。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21