換熱器芯體釬焊自動上下料系統的設計
2022-12-28 04:04:44葉文德
機械制造 2022年9期
關鍵詞:系統
葉文德 張 博
上海電氣集團自動化工程有限公司 上海 200233
1 研究背景
換熱器的芯體由十幾個散熱翅片與隔板疊加后再進行釬焊而形成。為提高釬焊產能,通常先將散熱翅片與隔板疊加組裝,再用特制工裝進行固定,形成帶工裝的芯體。然后將這些帶工裝的芯體擺放在釬焊爐架中批量運輸到釬焊爐中進行釬焊,完成釬焊后再運出釬焊爐。上料工位負責將待焊的帶工裝的芯體批量擺放到釬焊爐架中,下料工位負責將釬焊爐架內已焊好的芯體清空。目前多采用人工進行上下料,根據產能要求,每個生產循環內操作工需要擺放數百個芯體,勞動強度較高,釬焊爐架余溫較高,且存在粉塵,環境比較惡劣,容易對操作工造成灼傷或導致職業病。另一方面,還存在人為擺放不到位等誤操作,容易導致釬焊缺陷。為提高釬焊質量和產能,減少對人的依賴,筆者設計了換熱器芯體釬焊自動上下料系統,完成對整個芯體釬焊作業生產線各功能單元節拍的評估,研究機器視覺定位,設計機器人抓具,并用機器人代替人工來完成釬焊上下料。
2 自動上下料系統構成
自動上下料系統主要包括帶工裝的芯體、釬焊爐架、循環輸送鏈、機器人、機器人抓具、三維工業相機系統和上下料輸送輥道等。
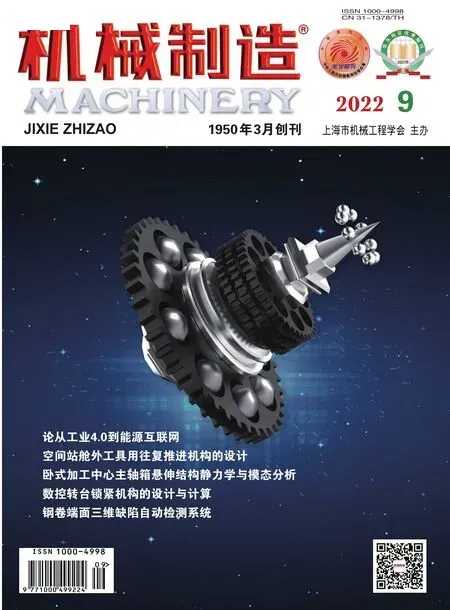
(1) 帶工裝的芯體。帶工裝的芯體指芯體組裝了釬焊工裝后的組合體,釬焊工裝是為固定芯體釬焊前的散熱翅片與隔板疊加組件而設計的,設計要求有三點:① 使組裝的散熱翅片與隔板形成一個整體,方便運輸;② 工裝本身方便組裝和拆卸;③ 工裝不能與需要釬焊的翅片或隔板有接觸。帶工裝的芯體如圖1所示,單個芯體總質量約為5 kg。
▲圖1 帶工裝的芯體
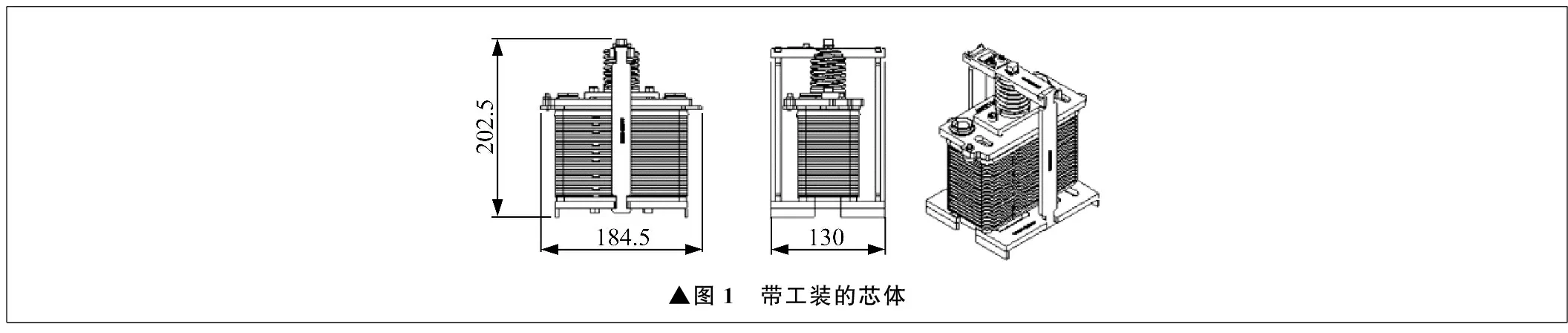
(2) 釬焊爐架及循環輸送鏈。一個釬焊爐架有三列七層共計21個盛放單元格,每一個單元格可以放兩排帶工裝的芯體,每排放八個,一個釬焊爐架可以盛放336個芯體。單個釬焊爐架的主體尺寸為2 620 mm×3 960 mm×400 mm,如圖2所示。
▲圖2 單個釬焊爐架
循環輸送鏈負責從上料工位將擺放芯體的釬焊爐架輸送至釬焊爐,完成釬焊后,再將釬焊爐架輸送至下料工位進行自動下料。下料完成后,將釬焊爐架輸送至上料工位。一條循環輸送鏈根據產能,可以同時輸送多個釬焊爐架。
(3) 機器人。兩套機器人系統一套用于上料,一套用于下料。每套機器人系統包括一套外部軸和一套機器人抓具。外部軸主要用于增大機器人的運動范圍,使其充分覆蓋釬焊爐架每個盛放單元格的取料和放料。機器人抓具用于在上下料時對芯體的搬運。
(4) 上下料輸送輥道。兩套上下料輸送輥道一套用于上料,一套用于下料。上料輸送輥道負責將待焊的芯體輸送至指定上料點,用定位工裝完成對芯體的定位。下料輸送輥道負責配合機器人從釬焊爐架內搬運過來已焊好的芯體,輸送至指定的工裝拆解點,拆解好的工裝再運回組裝線進行重復使用。
(5) 三維工業相機系統。兩套三維工業相機系統一套用于上料,一套用于下料,分別安裝在上下料機器人抓具上。上料工位三維工業相機系統主要用于對釬焊爐架放置位置的拍攝,并計算出精確的放置位置,協助機器人完成芯體在釬焊爐架內的放置。下料工位三維工業相機系統主要用于對釬焊爐架內芯體位置的拍攝,并計算出精確的抓取位置,協助機器人完成對釬焊爐架內芯體的抓取。
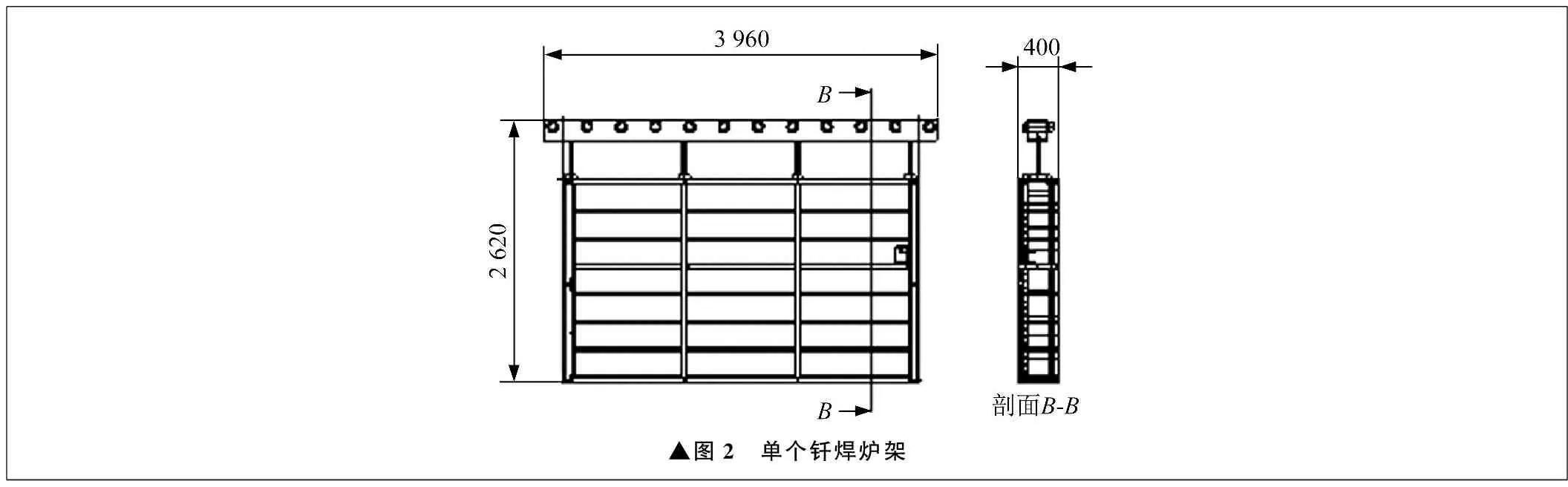
(6) 人機界面。應用人機界面對整個系統的運行狀態進行監控。采用可編程序控制器,使用工業總線實現實時和非實時數據傳輸,具有高度可靠性和可維護性。安全設備采用門開關,作為機器人工作區域的安全防護,可做到人機隔離,確保系統在自動運行中人員的安全。控制系統如圖3所示。
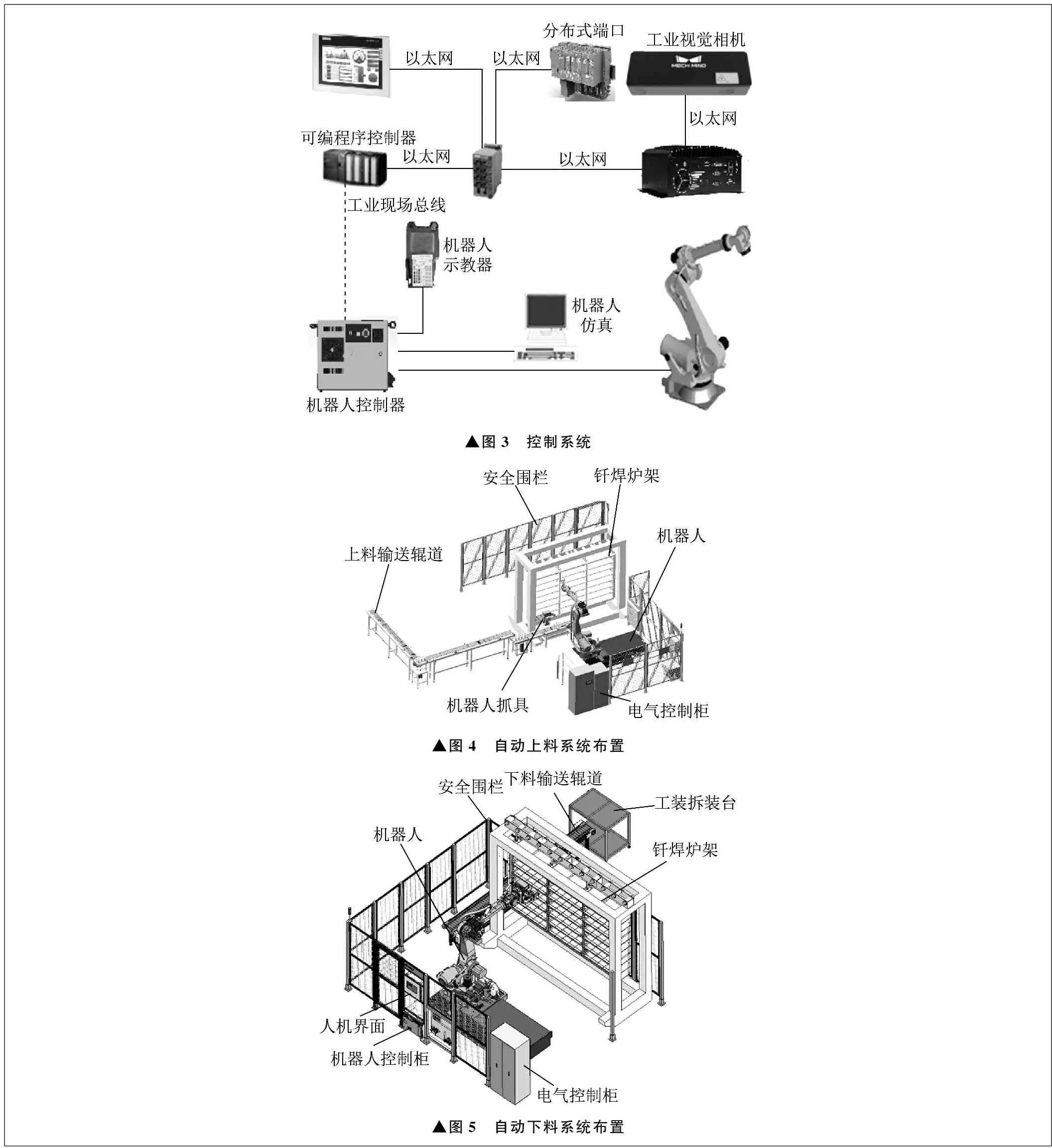
▲圖3 控制系統▲圖4 自動上料系統布置▲圖5 自動下料系統布置
自動上下料系統的布置如圖4和圖5所示。設備運行時,兩臺機器人分別與上下料輸送輥道、釬焊爐架及輸送鏈聯動,完成在批量釬焊過程中的自動上下料。
3 機器人工作流程
機器人利用高清晰三維視覺系統攝像頭來獲取釬焊爐架的精準放置位置或抓取位置。配置機器人抓具的機器人與控制器進行通信,得到芯體放置或抓取的具體位置參數后,移動至位置上方,完成芯體的放置或抓取。此套系統的關鍵在于對芯體放置或抓取位置的精確定位,以及抓取芯體的成功率。自動上下料系統工作流程如圖6、圖7所示。
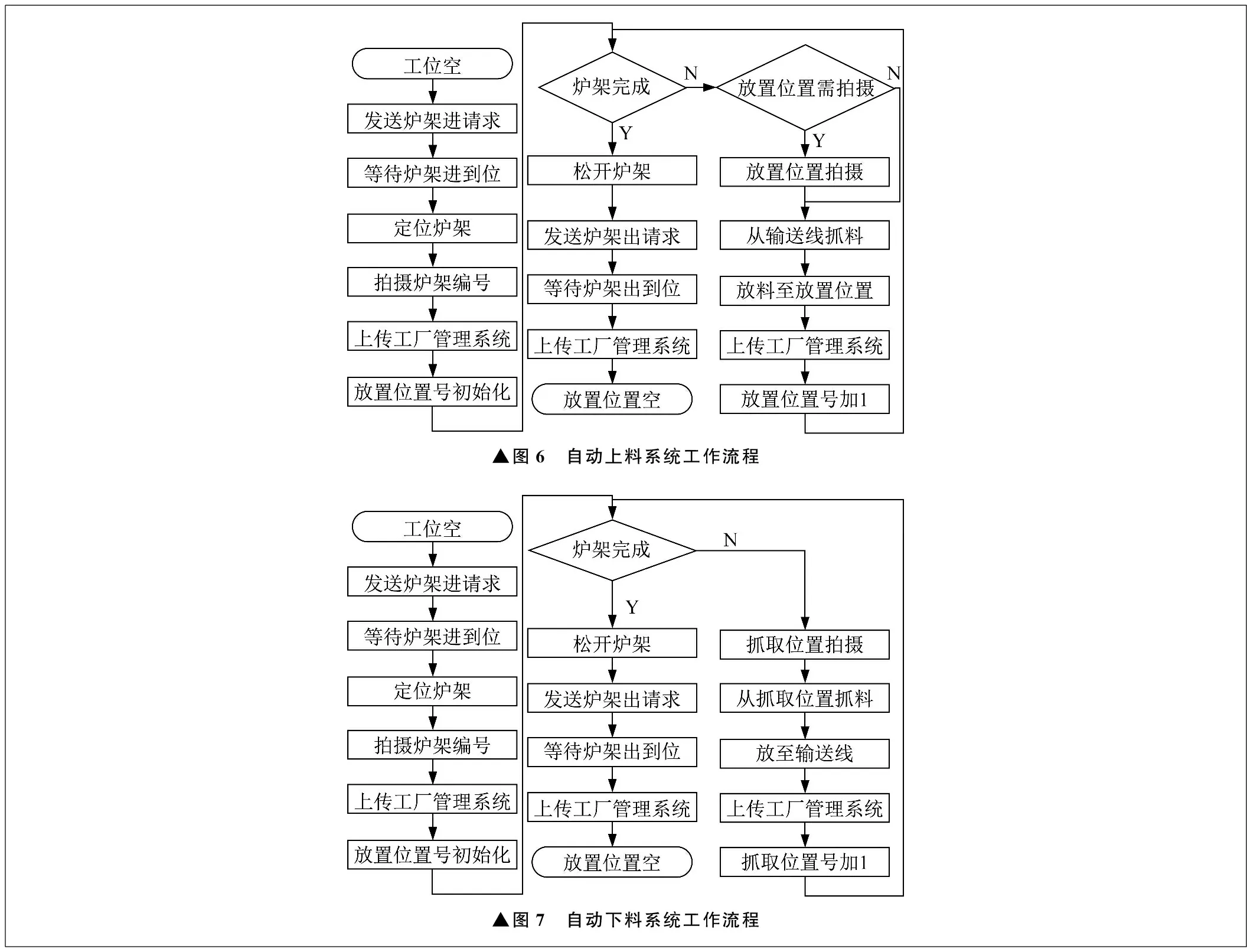
▲圖6 自動上料系統工作流程▲圖7 自動下料系統工作流程
4 釬焊爐架定位
釬焊爐架整體外形尺寸較大,在釬焊過程中,釬焊爐架會存在不同程度的變形。在上料過程中,對每個放置位置特征點采用三維工業相機進行拍攝,通過計算得出放置位置特征點的偏移值,根據偏移值得出放置的位置補償,對芯體最終的放置位置進行修正,從而減少上料過程中的碰撞,有效提高上料系統的穩定性。在下料過程中,除了釬焊爐架自身的變形外,釬焊工裝在爐架內還會產生竄動,對此也需要采用三維工業相機進行拍攝,通過計算得出取料位置特征點的偏移值和每個芯體的竄動量,根據偏移值和竄動量計算出取料的位置補償,對芯體最終的抓取位置進行修正。對于某些竄動量過大的芯體,通過計算得出竄動量是否超出允許量。如果超出允許量,那么需要報警,提示人工干預,排除異常,有效提高下料系統的穩定性。
5 節拍平衡
自動上下料系統與上下游組裝線和釬焊爐構成完整的芯體釬焊回路。為提高整個釬焊回路的生產效率,自動上下料系統通過機器人仿真軟件進行仿真,得出機器人每次需要放置或抓取四個芯體,可以達到系統節拍平衡。
單條組裝線的輸出節拍為每個15 s,則兩條組裝線輸出芯體節拍為每個7.5 s。
自動上下料系統完成一次上下料時間為30 s,因此每次需要同時上下料四個芯體。
上下料輸送輥道單元通過擋隔料裝置完成每次給上料點派發四個芯體,派發節拍為每四個30 s,從而達到與機器人、組裝線之間的節拍平衡。
6 機器人抓具
機器人抓具如圖8所示,可以實現同時抓取四個芯體。考慮到抓具需要伸到釬焊爐架內擺放芯體,且抓具退出空間有限,采用四連桿機構。四連桿機構由一個氣缸驅動開合,將連桿的機械死點作為抓具的閉合位置,這樣在機器人抓取和搬運過程中,即使驅動氣缸發生意外,抓具也能保證在閉合位置,提高系統的安全性和可靠性。
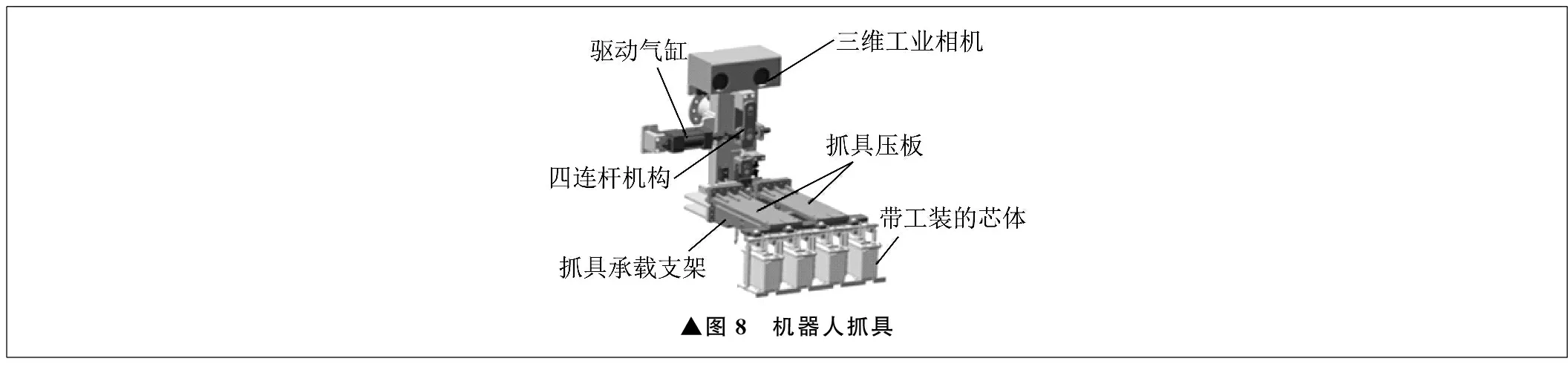
▲圖8 機器人抓具
7 結束語
隨著新能源產業在我國蓬勃發展,產業內各細分子行業對生產各環節的自動化要求越來越高。對此,工業機器人具有重復定位精確、可靠性強、生產柔性化、自動化程度高等無可比擬的優勢。筆者設計的換熱器芯體釬焊自動上下料系統具有生產可靠、效率高、操作方便、環節可控等顯著特點,與人工相比,能夠完美匹配整個釬焊系統的工藝節拍和產能,提高生產效率和產品品質,提升企業的自動化生產水平,在降低企業勞動力成本的同時提高產品的市場競爭力。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32