基于無人機的模塊化環境監測系統
2022-12-21 10:05:16王千秋李俊杰
信息記錄材料 2022年10期
王千秋,李俊杰,駱 毅
(廣東東軟學院 廣東 佛山 528225)
0 引言
隨著當今社會的快速發展,人們日益增長的生活需求帶來了巨大的經濟產能需求,與此同時,人們對良好生態環境的需求也在不斷增長,經濟產能的追求和環境保護的需求之間容易出現權衡的矛盾。而解決這個矛盾的關鍵就是落實環境保護措施,在確保生產的合理性和安全性的同時,最大化地滿足人們對生態環境的需求[1]。此外,隨著能源多樣性的發展,需要關注的環境問題也在早期的大氣污染、水體污染之上增加了光污染、輻射污染等新污染問題。目前的空氣質量監測系統多采用固定的地面監測站、地面移動平臺監測站、或是人工手持測量。傳統的監測方式成本較高,而且監測區域和監測項目在一定程度上都會受到限制[2-4]。無人機作為一種高效便捷的輔助手段,替代了原有工具并服務于各行各業,且具有成本低、機動性能好、使用方便等優勢,不僅提高了任務執行的安全性和可靠性,也廣泛應用于泄漏、火災等環境突發事件的安全監測,如大氣環境污染應急監測、風險場區的常規大氣質量狀況巡查、城市低空大氣質量狀況監測。相較于傳統的人工環境質量監測,以無人機為載體的大氣環境監測系統,可以收集多方位和龐雜地區環境條件下的大氣環境數據并上傳至終端服務器,實現高效全面的數據查詢。
本文提出一種模塊化無人機環境監測系統,可精確獲取大氣污染物的分布數據。相較于傳統監測方式,本無人機環境監測系統具有低成本、即時性、高可塑性、高延展性、高靈活性、自動化處理等優勢,可滿足當下對環境監測的需求,并且其高靈活性、高自動化和低人工成本等優勢也必然是未來環境監測的主流趨勢。
1 系統概述
1.1 基本功能和基本組成
該模塊化無人機環境監測系統具有以下基本功能,一是可即時傳輸無人機正前方的圖像數據,并顯示到地面控制站的軟件頁面上;二是無人機可搭載所需要的探測設備,在飛行時執行環境監測任務;三是無人機上的數據經過STM32單片的處理,會實時打包發送至地面控制站,并將數據與GPS位置結合,實時顯示監測數據的三維位置。四是該系統可在PC端的軟件上操控無人機,實現脫離無人機手柄操控無人機飛行。五是無人機采用模塊化設計,所有設備如電機螺旋槳、攝像設備、無人機機體組件以及探測設備都是以獨立模塊的結構匯集到無人機上,可以實現快速拆裝、替換。
該系統框架如圖1所示,主要由無人機移動監測平臺和無人機地面控制站組成,在無人機執行飛行監測任務時,地面控制站可實時接收無人機傳輸的測量信息、定位信息和實時畫面,并在不同頁面上展示無人機傳輸過來的各項內容。此外,地面控制站還可以即時控制無人機的飛行狀態,根據實際情況對其飛行動作進行調整。該系統可結合多種探測器進行使用,其中較為基本的監測探測器有:用于氣體檢測的常規工業氣體檢測集成模組(內含ZH03B型PM2.5激光粉塵傳感器、ME3-H2S二氧化硫傳感器、MC105型的催化燃燒式一氧化碳傳感器、催化燃燒式氣體的二氧化碳傳感器、可燃氣、MC119型催化燃燒式工業燃氣傳感器、ZP07-MP503型的空氣質量探測器),用于檢測核輻射數值的β、γ核素探測儀,用于檢測氣象數據的超聲波氣象探測儀等。
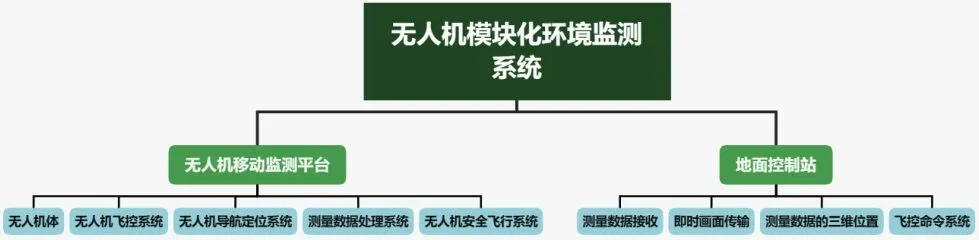
圖1 無人機模塊化環境監測系統架構圖
1.2 工作流程概述
本系統所采用的無人機為六旋翼無人機,荷載為5kg,可在無人機上同時搭載多類探測器或水體采樣器,如β射線/γ射線輻射探測器,超聲波空氣數據探測器,氣體探測器,GPS定位器等等。硬件結構如圖2所示,探測器所采集的數據由STM32單片機處理后,將測量的數據與測量時無人機的GPS三維定位打包發至地面控制站,在地面站的軟件頁面上實時顯示。

圖2 無人機硬件系統概述圖
無人機作業流程如圖3所示,飛行前,作業員需要對飛行設備和飛行環境進行檢查,根據項目場景需要選擇合適的探測器。確定所有設備正常后便可制定探測任務和飛行路線,隨后執行飛行計劃。在無人機飛行過程中,可選擇開啟安全模式,當監測到無人機四周存在障礙或是某個測量數值過高時,禁止無人機朝障礙物方向或高濃度方向繼續前行,必要時可一鍵返航,最大程度避免無人機遭受損害或污染。同時,由于無人機在啟動、起飛、空中姿態調整時,會產生較大的瞬時電流,因此該系統的無人機移動監測站采用了雙電源設計,將無人機的機組部件的供電系統與探測設備和STM32主控的供電電源分開,飛行控制系統與探測設備獨立運作,保障了探測數據的精準性和穩定性。

圖3 無人機執行任務流程圖
2 應用場景舉例
2.1 核輻射風險區域監測探查
切爾諾貝利和福島核電站事故的發生,讓人們在享受核能帶來的高效產能的同時,也對核的放射性污染懼怕三分[5]。由于人類在短期內不能明確感知自己是否暴露在核輻射下,所以在有核輻射外溢、泄露的風險區域,采用無人機監測系統對該區域進行數據監測和收集是較為適合的環境監測方案。它可以有效避免人員安全事故的發生,并可采集區域內不同高度、不同位置的目標數據。在人不踏入該風險區域的前提下,也能對該區域有全面的了解。
2.2 在目標區域進行定時定點定高數據采集
在無地面監測站或是地面監測站無法測量的區域,采用多旋翼無人機監測系統收集不同時段的固定經緯度與固定高度下的大氣數據和目標氣體濃度,可更好地配合地面監測站收集的數據進行分析,且由于無人機監測系統的便攜性,可實現在一定時間內多個定點定高的數據采集[6-7]。
2.3 工業區廢氣排放平掃監測
在當前環保政策越來越嚴格的情況下,仍會有工廠在半夜或者假日偷排廢氣,而人員走訪監測的方案不僅效率較低,而且人工成本高,因此采用無人機環境監測系統進行區域平掃監測才是更合適的方案[8]。在使用無人機環境監測系統時,可在出發前在地面站系統上事先設定飛行路線,設定好飛行路線后無人機將自動完成飛行路線并返航,在飛行途中還可將實時的檢測數據連同GPS定位回傳至地面控制站軟件頁面,并在檢測到超標濃度后發出警報,可快速、精確地檢測到平掃區域的廢氣排放情況,更好地落實環保監督政策。
3 無人機環境監測系統優勢
3.1 在潛在高風險、高危險的環境條件中的監測優勢
無人機具有高機動性和高操縱性等特點。在崎嶇險峻的懸崖、山林,活躍的火山口,沼澤濕地,以及潛在或已知的高危環境,如核輻射、有毒氣體、有毒氣霧等監測或調查人員難以抵達現場的區域,可利用無人機的高機動性和無線數據傳輸技術,收集到目標區域現場的圖像數據和目標監測數據如氣體濃度、氣體組成、輻射等級等等,能在有效提高環境監測效率的同時,盡可能避免未知的惡劣、高危環境對人員生命安全造成傷害。
3.2 在大范圍區域數據收集方面的優勢
無人機高速飛行的特點讓其可以在短時間內收集更大范圍的目標數據,并且受益于無人機的即時傳輸,可在大范圍收集數據的同時,觀察目標區域的變化情況,為接下來的測量方案做出調整[9]。除此之外,還可以在不同高度進行平掃測量,收集同一區域不同高度的氣體信息,對該區域的氣體成分有更為全面的了解和統計。目前,在農業植保方面已經有采用無人機播種和噴灑農藥、化肥的先例,但在環境監測領域的應用仍然較少。
3.3 模塊化設計的優勢
本系統的無人機移動監測站采用模塊化設計,其中的探測模塊、無人機GPS模塊、無人機的單個電機旋翼等均為模塊化設計。需要測量不同的數據時,可以做到就地快速替換探測器,因此能在同一時間內監測多種不同的數據,包括氣體數據、氣象數據、水體表面氣霧數據等。并且,當無人機部件意外受損、發生故障時,也可以做到快速更換維護,不影響后續的監測計劃。
3.4 采集數據多樣化的優勢
搭載在無人機上的探測設備包括氣體探測、水體容器、水霧探測、核素探測、光輻射探測等,可根據實際情況選擇多種不同的組合。每次飛行可以同時收集1~3種目標數據,在一定程度上減少了環境監測的工作時間,提高環境監測的效率。在水體檢測時,能有效減少水體樣本在運輸過程中的時間損耗,一定程度上保證了水體樣本與水體的一致性。
4 無人機在環境監測存在的問題和改進方向
無人機雖然在環境監測中具有很大的優勢,但由于在環境監測領域的應用過少,許多應用還處于測試階段,所以在荷載、續航和測量方法等方面還存在以下問題:
4.1 無人機飛行條件限制
無人機的抗風性多數為6級風速,當地表風速超過6級風速時,無人機飛行將會有安全隱患。本文提出的無人機環境監測系統所采用的無人機具有6~8級抗風能力,但在風速超過8級時,就不應再執行測量任務[10]。而像山谷、高空,或是有強烈對流的區域,由于其環境因素導致的小范圍高風速,也可能會影響無人機的執勤安全和穩定性。因此,提高無人機的抗風性,才能有效提高無人機在環境監測領域的應用范圍。
4.2 仍然較依賴人工操控
在確認安全的區域執行飛行監測任務,雖然可以事先設定好飛行航線,由無人機自主完成飛行監測任務,但在大多數任務當中,還是需要人工手動操控調整無人機的飛行路線。一方面,優化無人機的傳感器設備,如自主避障,或是增加視覺跟蹤系統,實現目標飛行跟蹤,實時跟蹤監測特定目標的輻射情況或是廢氣排放情況,如核動力船只的安全跟蹤、大型貨輪的尾氣排放等[11]。另一方面,可參考無人機表演的無人機群,建立應用于環境監測的無人機集群系統,批量、自動化操控無人機,命令其智能完成簡單的監測任務。完善這兩個方面,可使無人機在環境監測、環境保護領域能更高效地完成環境測量任務。
4.3 無人機的荷載能力以及探測器的重量和大小
當今多旋翼無人機的荷載大都不會超過5 kg,再加上探測器設備大多數都具有體積大、重量大的共性,因此難以實現單個無人機搭載多個探測器的效果,無法完成單次飛行收集多項數據的監測任務[12]。增加無人機的載重能力或減小探測設備的尺寸和重量,都能使得無人機在環境監測領域具有更高的可塑性,從而增加無人機在環境監測領域的應用。
5 結語
目前無人機在航拍和表演領域發展已經較為成熟,但在行業用機上還有很大的發展空間,尤其是無人機在環境監測上的應用還存在較大空缺。本文所研究的基于無人機的模塊化環境監測系統,能夠提供更豐富、更高效、可行性更高的環境監測實施方案。利用無人機的可操縱性、無線傳輸技術和模塊化的探測器組合,可有效拓展環境監測領域的測量、監測方式,實現對區域環境的實時監測和數據的多樣性、多維度的分析。該模塊化無人機環境監測系統對于無人機的應用領域和環境監測的方式方法具有重大參考價值。
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
現代裝飾(2020年5期)2020-05-30 13:01:56
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:50
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21