煤礦奧灰水動態監測系統設計及應用
2022-12-20 12:03:16賀炳偉
陜西煤炭 2022年6期
賀炳偉
(延安車村煤業(集團)有限責任公司,陜西 延安 717300)
0 引言
我國富煤、缺油、少氣的資源現狀,使得煤炭占據了我國一次能源的主體地位,2021年我煤炭消費量在一次能源占比達到56%,是目前世界上煤炭消費量最大的國家[1-2]。煤炭安全高效開采已成為我國煤炭發展的必然趨勢,已成為行業共識[3]。只有穩定健康地發展煤炭才能一定程度地穩定能源需要、保障經濟發展[4-5]。近年來,隨著淺煤層資源的枯竭,煤炭開采深度的加深,煤炭開采過程中的水、火、瓦斯、粉塵和礦壓災害現象也越來越嚴重。目前,突水災害已成為僅次于瓦斯爆炸災害的煤礦第二大災害,嚴重制約煤礦的安全高效開采。在所有的水害之中,奧灰水的突水災害對煤層安全開采影響最為嚴重[6]。底板奧灰水害是制約我國石炭-二疊紀華北型煤田安全開采的重要因素,隨著煤炭開采強度、深度的日漸增加,下組煤帶壓開采,面臨嚴峻的突水危險[7-9]。在奧灰水預測方面,目前常用的方法有2種,分別為突水系數法和含水層水位變化預測方法[10-11]。
ELSWORTH[12]通過建立井下地理探測管理信息系統,運用煤礦井下的水文信息的動態變化來實現奧灰水的動態監測。魏久傳[13]在地理信息系統的基礎上,進一步采用水文監測的手段,進行水害監測。劉惠德、高丁丁等[14-15]同樣在地理信息系統的基礎上,進一步開發了煤礦井下水文監測信息系統,通過二者的結合,極大程度上提升了礦井水害的預測精度。筆者在上述學者的研究基礎上,考慮采動過程中水害變化的非線性特征,提出一種煤礦井下奧灰水的動態監測系統,為煤礦的水害防治提供手段和方法。
1 系統硬件設計
煤礦井下奧灰水動態監測系統由3個主要部分構成,分別為煤礦井下的數據采集系統、地面數據分析和顯示系統以及井下和地面的通信系統,奧灰水動態監測系統的總體結構如圖1所示。地面數據分析和顯示系統由顯示器、服務器以及數據收發終端等組成;井下的數據采集系統由傳感器、交換機以及本安網關組成。在綜采面所有的電法儀均接入一臺光纖交換機中,然后通過光纖將地面與綜采面井下奧灰水監測系統進行連接,實現數據通信。電法儀在綜采面內也通過光纖通信,所有電法儀之間的通信均采用TCP/IP協議。
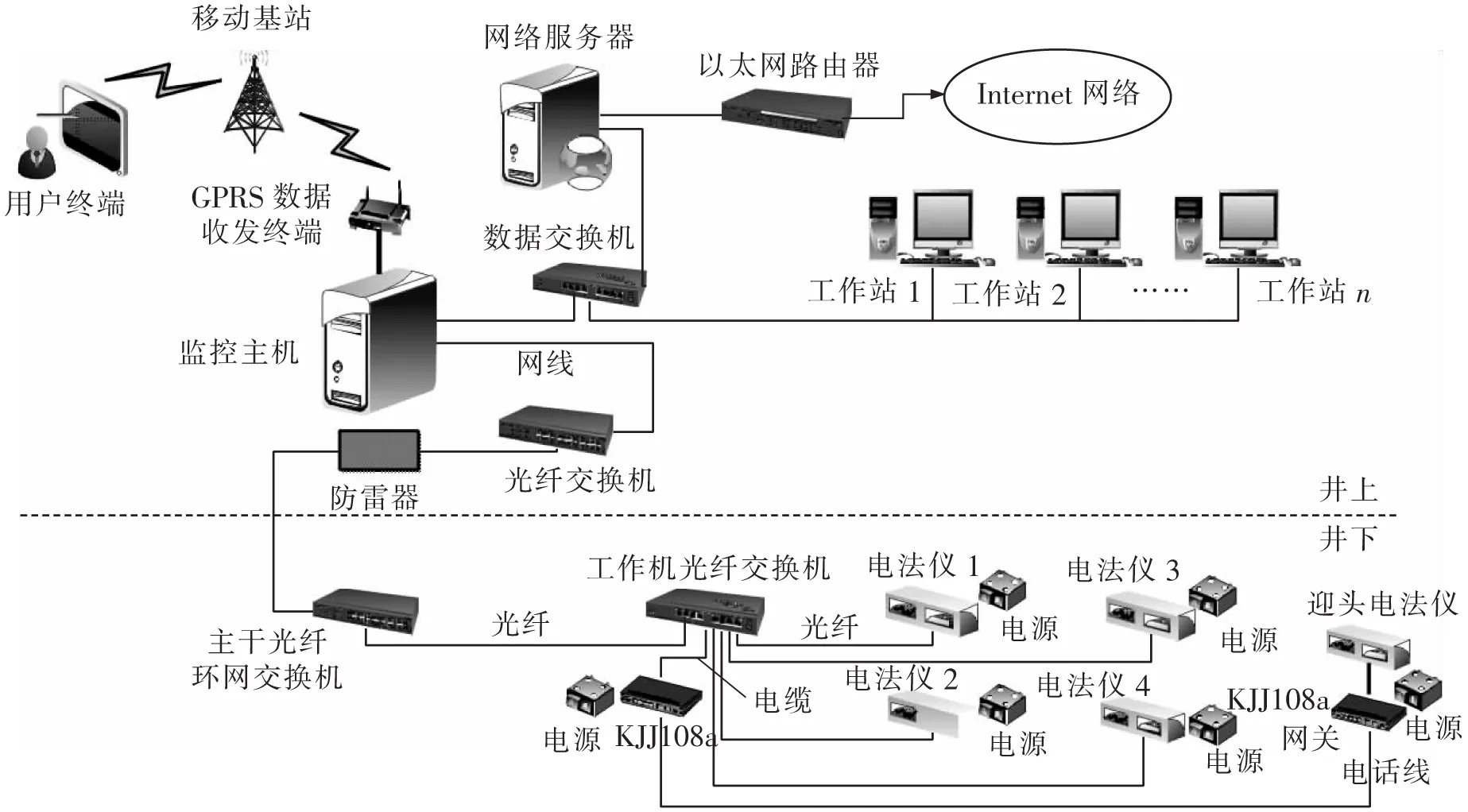
圖1 奧灰水動態監測管理系統結構示意
2 系統軟件設計
煤礦奧灰水動態監測系統內核采用Linux系統,桌面采用Qtopia。通過自主設計的監測系統,能夠有效實現對傳感器等外設器件的驅動,同時能夠很好地進行數據圖形化顯示以及與綜采工作面集控系統之間的通信等功能。煤礦奧灰水動態監測系統的數據處理模塊包含了數據采集、數據存儲、數據傳輸等單元。
2.1 井下軟件工作流程
井下軟件在第1次使用時,需要配置井下主機與地面控制中心的IP地址。當開始運行監測系統時,系統一旦發生數據獲取失敗的情況,則系統的控制模塊會主動預警并發送控制指令重新接受數據,監控系統軟件井下數據采集流程如圖2所示。

圖2 井下數據采集傳輸流程
2.2 井上軟件工作流程
奧灰水動態監測系統中地面系統的軟件工作模式為交互式。地面系統軟件在開始運行之前要進行相關參數的配置。其中涉及的配置參數包括探測類型(頂板、底板、超前)、測量方法以及采樣時間的設置等,如果系統出現故障或者數據加載出錯,系統會自動化報警。在設置好運行參數以后,監測系統根據下達的任務指令開始接受并存儲監測到的數據,最后系統對接收到的數據進行統計分析和計算,根據預先設置的閾值進行預報或者預警,實現對井下奧灰水的動態監測和預警,地面監控軟件的工作流程如圖3所示。

圖3 井上軟件系統工作流程
3 軟件預報預警策略設計
3.1 底板突水預警策略設計
為了更加準確地建立底板突水預警策略,需要整理煤礦建井時的鉆探地質資料,并建立煤礦井下的地質模型,如圖4所示。其中,h0為安全隔水層的最小厚度,M為底板最大的隔水厚度。
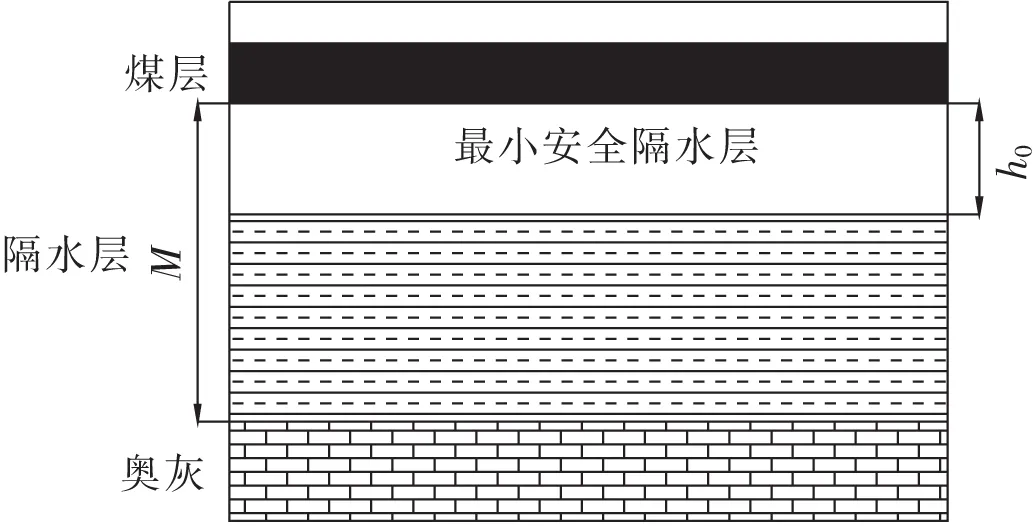
圖4 底板層狀地質模型
在綜采面還未進行開采時,先要對綜采面底板的電阻率進行一次測量,以此來獲得綜采面未進行開采時工作面底板的突水系數
(1)
式中,Ts為突水系數,MPa/m;P為底板能夠承受的水壓,MPa;M為底板最大隔水厚度,m。
在井下工作面實際回采過程中,通過電阻率的反演來判斷頂板以及底板的含水情況,如果電阻率低說明含水量比較大,如果電阻率比較大說明含水量少,因此將電阻率的大小設置為突水預警等級的閾值,突水系數Ti為
(2)
式中,Ti為突水系數,其中i=1,2,3,MPa/m;P為底板隔水層承受的水頭壓力,MPa;hi為電阻率低阻區高度,其中i=1,2,3,m。
基于上述判斷原則,確定實際回采過程中突水預警等級閾值的設置見表1。
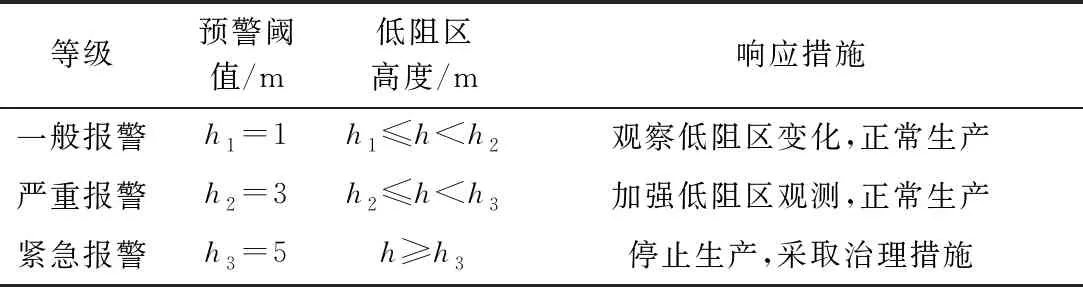
表1 預警閾值及等級設置
3.2 底板突水預警數據采集方案設計
每隔100 m安裝一套電法儀,用于對數據的采集和分析,數據采集的控制器直接連接信號采集傳感器。為了保證良好的測量效果,將傳感器安裝在巷道的底板下方,使傳感器與底板能夠充分地接觸。工作面底板數據采集系統布置方案,如圖5所示。采用三級超前探測法,獲取掘進迎頭前方監測范圍100 m以內的電阻率變化趨勢,分析工作面巷道掘進前方的富水特性。隨著掘進深度的增加,每隔100 m增加1套掘出巷道分布式數據采集與控制裝置,向前采集數據。本研究設計的奧灰水動態監測系統的布置,如圖6所示。
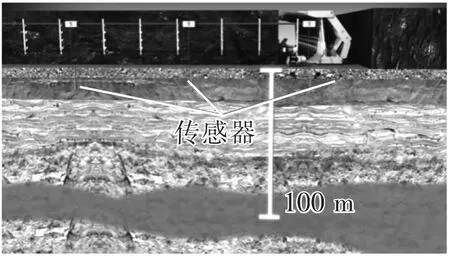
圖5 工作面底板富水性數據采集示意

圖6 掘進迎頭超前富水性數據采集示意
4 試驗結果與分析
4.1 現場布設
根據綜采面的長度和剩余開采長度,在某礦山巷道布置一套煤礦奧灰水動態監測的數據采集與預警控制裝置。成套裝置在工作面的安裝示意圖,如圖7所示。值得注意的是,在安裝過程中一定要保證傳感器與底板的充分接觸。在實際的監測過程中,要根據回采的情況實時對監控裝置進行調整,不斷向后撤離直至完成整個回采面的動態監測。

圖7 工作面底板監測系統現場布設示意
4.2 監測結果分析
通過對整個奧灰水監測系統的安裝、布置以及數據采集系統的初始設置,完成整個系統的調試,然后對回采過程中工作面奧灰水的變化進行實時監測和顯示。通過分析監測到的數據信息,在整個監控時間和空間范圍內一共檢測到4處低電阻區域,說明該區域奧灰水的含量比較高,其在工作面的分布區間和范圍如圖8所示。其中,藍色部分表示低電阻,說明含水量較大,紅色部分表示高電阻,代表含水量較小。

圖8 礦井水害預警系統異常區
考慮回采過程中礦壓的連續變化,分3個階段對底板的電阻率進行連續監測。研究分析的該工作面長度為2 000 m,已回采的距離為600 m,監測區間為650~2 000 m。根據監測的可視化結果,能夠清晰地劃分出來低電阻區域和對應的富水區域,可視化結果如圖9所示。綜合回采過程分析,發現回采過程對底板的擾動,使得奧灰水分布變化的影響較小,在整個監測的區域內一共有4個區域的監測并沒有明顯的異常變化,其中3號區域有一定的變化,但是變化在合理范圍站內,不會造成生產事故。

圖9 第1階段監測數據
當工作面回采完1 000 m以后,監測區間變為1 050~ 2 200 m,電阻率的反演結果如圖10所示。從圖中發現,在本階段的監測區間內,原先存在的3#、4#異常區消失了,1#、2#異常區與原先的狀態相比,范圍和位置并沒有明顯的變化。通過搭建該系統,經過一段時間的井下工作面監測試驗結果表明,該奧灰水動態監測系統能夠很好地對礦井水進行監測和預警,實現了奧灰水的智能監測。

圖10 第2階段監測數據
5 結語
(1)根據礦井實際地質情況,基于計算機技術、物探技術以及通信技術,提出了煤礦奧灰水動態監測方案,建立了監測系統。
(2)通過煤礦井下試驗,結果表明設計的奧灰水動態監測系統能夠很好地對礦井水進行監測和預警,實現了奧灰水的智能監測,為煤礦井下的安全生產管理提供了必要的理論支撐,為實時預防煤礦井下水害的發生提供了很好的決策依據,對礦井奧灰水防治意義重大。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
工業設計(2016年4期)2016-05-04 04:00:23
現代企業(2015年8期)2015-02-28 18:55:34
現代企業(2015年6期)2015-02-28 18:51:50
河南科技(2014年8期)2014-02-27 14:08:07