基于北斗短報文的可信遠程控制模型設計與驗證
2022-12-18 10:12:14吳上李姍張凱娜劉益辰趙辰乾
移動通信 2022年10期
吳上,李姍,張凱娜,劉益辰,趙辰乾
(中國船舶集團有限公司系統工程研究院,北京 100094)
0 引言
遠程控制手段在軍事、環境監測、漁業生產、森林防火、自動駕駛、電力巡檢等諸多環境中得到了應用[1],能夠有效減輕參與人員工作強度,提高工作效率。現有的遠程控制手段主要基于4G、5G、Wi-Fi 或藍牙,盡管有著部署成本低、開發難度小的特點,但通信范圍受限于運營商網絡建設力度或協議自身缺陷,安全性無法得到保障。如在軍事領域,傳統遠程控制手段容易被敵方截獲、篡改,影響國防安全,對信息鏈路的安全性要求很高,因此普遍采用光纜直連的方式,但其成本高,覆蓋領域有限;環境監測、森林防火應用場景事關人民群眾財產安全,一旦發生重大安全事故必須立刻上報至指揮中心,對信息傳輸可靠性要求很高;在自動駕駛領域,對車輛位置的高精度定位多基于超寬帶通信(UWB,Ultra Wide Band)、高精度地圖等,過于依賴相關基礎設施建設,局限性較大。北斗衛星導航系統作為我國自主可控的衛星系統,其獨有的短消息服務是一種覆蓋范圍廣、鏈路穩定可靠的天基通信手段,開展基于北斗短報文的可信遠程控制模型設計具有一定的研究意義。
1 傳統遠程控制手段
基于4G、5G和Wi-Fi/ 藍牙通信技術實現遠程控制是較為常見的遠程控制實現手段[1],但其中4G 通信手段僅可滿足對時延要求不敏感的應用場景,如野外地震臺站監測[2]、農業灌溉設備控制[3]等;5G 通信具備增強移動帶寬(eMBB,enhanced Mobile Broadband)、超大設備規模通信(mMTC,massive Machine Type Communications)、超高可靠性超低延遲(URLLC,Ultra Reliability and Low Latency Communications)的應用特點,特別適合于無人駕駛等[4]應用場景;Wi-Fi/藍牙通信憑借其低功耗特點,特別適合于智能家居場景[5]。郝國鋒等人基于4G 通信技術實現了對FPGA 的遠程更新,熊勇良等人基于5G 技術實現了對無人機的遠程控制[6],陳燕燕等人基于5G 技術實現了對機器人的遠程控制[7],崔斌等人基于Wi-Fi 通信技術實現了對家庭環境的遠程監測[8],陳立成等人基于Wi-Fi 通信技術實現了對智能型窗戶的遠程監控[9],以下對傳統的遠程控制方案分別進行展開介紹。
1.1 基于4G的遠程控制
基于4G 的遠程控制是使用我國已經廣泛建設的4G通信網實現控制指令傳輸和消息回傳,具有鏈路投入低、鏈路可靠、開發簡單的特點。圖1 是基于4G 的遠程控制模型的基本流程圖:
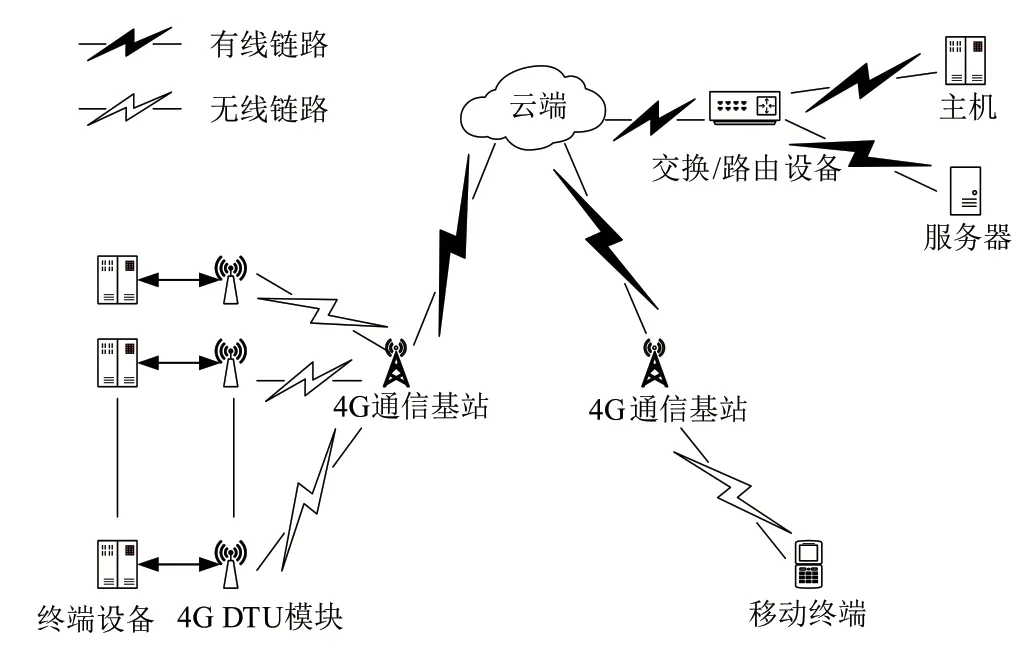
圖1 基于4G的遠程控制示意圖
如圖1,主機或服務器可從有線鏈路將控制指令經交換、路由設備發送至云端,云端接收后經4G 移動基站發送至4G數據傳輸模塊(DTU,Data Transfer Unit),4G DTU 收到后將網絡數據轉換為串口數據,發送給終端設備,終端設備執行相應命令。移動終端還可從無線鏈路將控制指令經4G 通信基站發送至云端,云端接收后經4G 移動基站發送至4G數據傳輸模塊,4G DTU 收到后轉換為串口數據,發送給終端設備,終端設備執行相應命令。這種方案組網快捷靈活,方案設計簡單,安全性能較好,但強烈依賴4G 網絡的健壯性,對于邊遠山區、遠海島嶼等4G 信號覆蓋較差的應用場景并不適用。除此之外,4G 網絡保密安全性較差,可在一定條件下被偽基站劫持流量,實現“中間人攻擊”[10],因此對于保密性安全性要求高的場合并不適用。
1.2 基于5G的遠程控制
作為新一代的通信技術,5G 移動網絡具有超高可靠性和超低延遲的優點,基于此可設計基于5G 實現車輛全自動駕駛、無人機遠程飛行控制,甚至是遠程機械手外科手術的的應用方案,能夠極大提高社會生產生活效率[11-12]。圖2 是基于5G 的遠程控制模型基本流程圖:
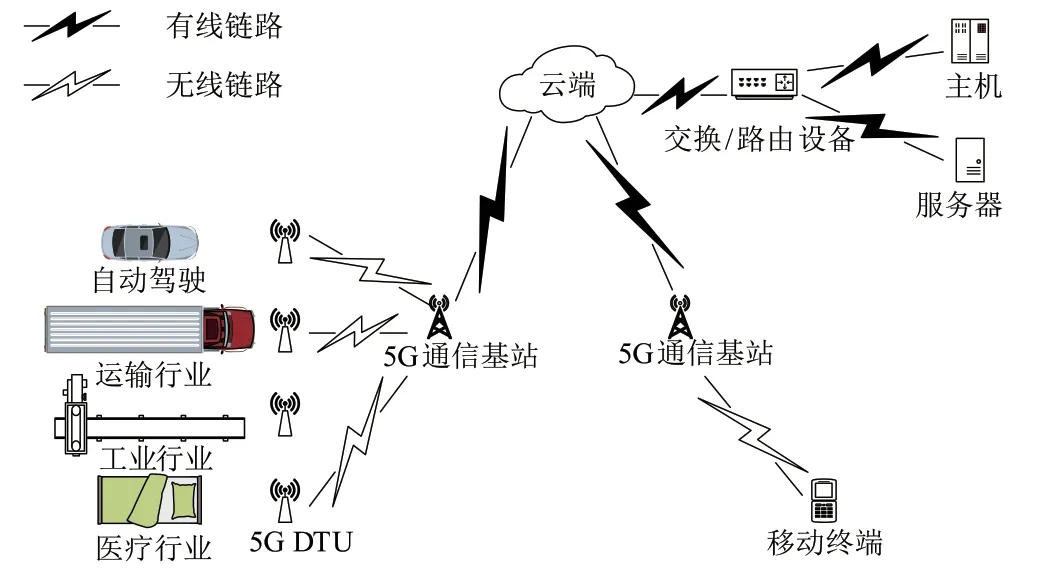
圖2 基于5G的遠程控制示意圖
如圖2,基于5G 的遠程控制模型工作流程與1.1 節中內容相似,在此不再贅述,但此種方案的鏈路安全性更佳,5G的通信協議可有效防范偽基站、流量劫持等網絡攻擊[13]。同時,除了向下兼容基于4G 的遠程控制流程應用場景外,基于5G 的遠程控制模型還可發揮網絡設備承載量大和延遲低的優勢,支撐自動駕駛、交通運輸、無人車間和遠程醫療應用。
但是,這種方案強烈依賴5G 網絡的健壯性,特別是對于自動駕駛、交通運輸等移動場景,5G 網絡運營商建設投入不足導致的通信信號不穩定對于系統正常運行和人身安全產生了巨大威脅。除此之外,5G 網絡在提供高速率的同時,對于能量的需求也很高,以市面某型5G DTU 為例,其在采用低功耗技術的前提下仍有5 W 的功耗,而4G DTU 功耗則普遍在0.5~1.5 W 之間,二者相差兩倍之多,因此基于5G 的遠程控制模型并不適合在低功耗應用場景中使用。
1.3 基于Wi-Fi的遠程控制
Wi-Fi、藍牙都是常用的傳感器近距離通信手段,一般用于環境感知、家電智能化等小型嵌入式系統設計[14-16],其典型工作流程如圖3 所示。

圖3 基于Wi-Fi/藍牙的遠程控制示意圖
Wi-Fi/藍牙、ZigBee、LoRa 均是常用的通信協議手段,因其具備相似的指標性能及局限性,在此僅選擇Wi-Fi/藍牙舉例介紹。基于Wi-Fi/藍牙的遠程控制一般通過智能移動終端與終端設備上各自的藍牙/Wi-Fi 模塊實現,雙方直接使用Wi-Fi 或藍牙連接,中間沒有數據中轉流程,安全性、抗干擾性較好,且協議簡單,方案成熟,能夠有效降低部署成本。同時,基于Wi-Fi 的遠程控制還能基于其免費、大傳輸帶寬的特點實現大量數據下發等功能。二者共同缺點是作用距離受限,根據藍牙技術標準,理想情況下(通視條件)民用產品的穩定通信距離只有20 m 左右,Wi-Fi 稍好但也只能達到5 km 左右[17]。雖然可以通過Wi-Fi-MESH 技術擴大作用范圍[18],但作用距離終歸有限,不能實現真正遠距離的控制。
2 基于北斗短報文的遠程控制方法
我國于1994 年啟動了北斗研發計劃,2000 年開始北斗一號建設,2004 年開始北斗二號衛星系統建設,2012年完成區域建設[19],2009 年啟動北斗三號衛星導航系統建設,2020 年完成北斗三號衛星導航系統建設,北斗三號衛星系統由30 顆衛星組成,其中包含24 顆中軌道地球衛星、3 顆地球同步軌道衛星和3 顆地球傾斜軌道衛星,可提供2.5~5 m 定位精度[20]。Ming-Quan Hong 等人使用廣播星歷計算北斗和GPS 高頻數據,并將結果用于設備的實時定位,證明了北斗基本能夠達到GPS 的定位精度[21],定位誤差優于0.48 m(R.M.S),授時精度優于19.1 ns[22]。北斗短報文是北斗相對于全球定位系統和格洛納斯系統而言的特有功能,能夠提供有限速率的雙向短消息服務。收發北斗短消息需要配置專用的通信卡以獲得唯一的終端號。北斗衛星導航系統具備良好的對地覆蓋能力,其空間信號連續性達到99.99%,空間信號可用性99.78%[22],可靠性大幅領先于其他遠程控制鏈路,因此使用北斗短報文實現遠程控制具有一定的可行性。
2.1 基于SM4的短消息加密模型
北斗短消息在傳輸過程中采用了明文傳輸,極容易泄露敏感信息或遭到重放攻擊,因此對短消息數據內容進行加密是十分必要的。國產密碼算法簡稱國密,是我國有關部門認定過的密碼算法,具有較高的安全性,常用的包括SM2、SM3和SM4 算法,其中SM2 算法是基于橢圓曲線密碼學(ECC,Elliptic Curve Cryptography)實現的非對稱加密算法,其計算復雜度、安全度很高,在密鑰生成速度上比RSA 快百倍以上[23],但對于終端設備的計算能力要求較高,不適合于北斗終端設備使用。SM4 是一種基于分組的對稱加密算法,在保證安全性的同時,其加解密流程相對簡單,對終端設備計算能力要求不高,適合北斗終端設備使用。
根據北斗協議約定,短報文的包格式如圖4 所示,為進一步節約計算資源,僅使用SM4 算法對數據內容部分進行加解密,使用專用服務器部署獨立密鑰管理生成服務用于管理證書、私鑰。以某領域應用場景下發核心控制指令為例,首先雙端設備從專用服務器獲取密鑰,然后將待發送的核心控制指令使用SM4 算法加密,加密指令經過鏈路到達接收端,接收端使用密鑰解密獲得原始核心控制指令,分配最后一個字節作為校驗字節,通過對解密后的原始核心控制指令運行校驗及糾錯流程確定核心控制指令的完整性,檢查無誤后最后執行指令。詳細過程如圖5 所示。

圖4 北斗短消息報文包格式
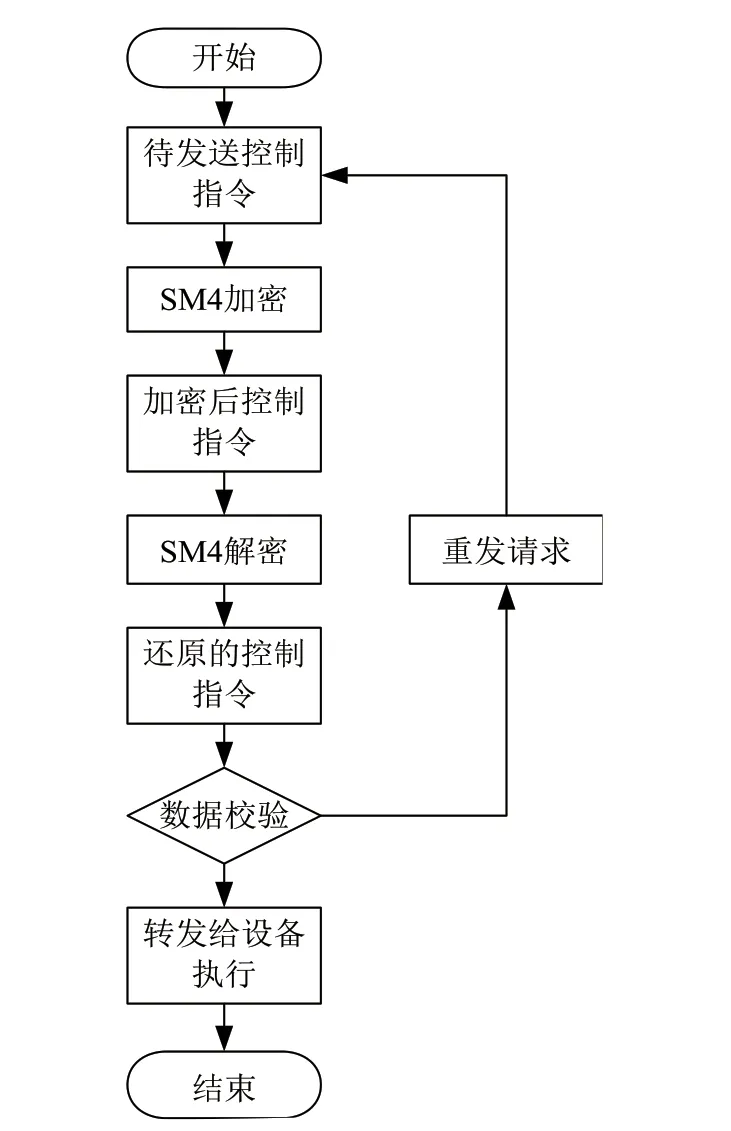
圖5 北斗短消息報文加解密流程
2.2 基于北斗短報文的遠程控制流程
頻度指的是一個終端能夠執行動作的最大頻率,民用版本北斗通信卡可提供1 條/ 分鐘的短消息發送頻度,單條消息數據容量78 字節。實際工業應用中常使用多卡終端以增加短消息發送頻度,即一個北斗終端安裝多張通信卡,程序串行調用短消息發送接口以加快發送速率。本文計劃采用2 個8 卡終端,雙工通信速率為624 字節/分鐘。基于北斗短報文的遠程控制模型如圖6 所示:
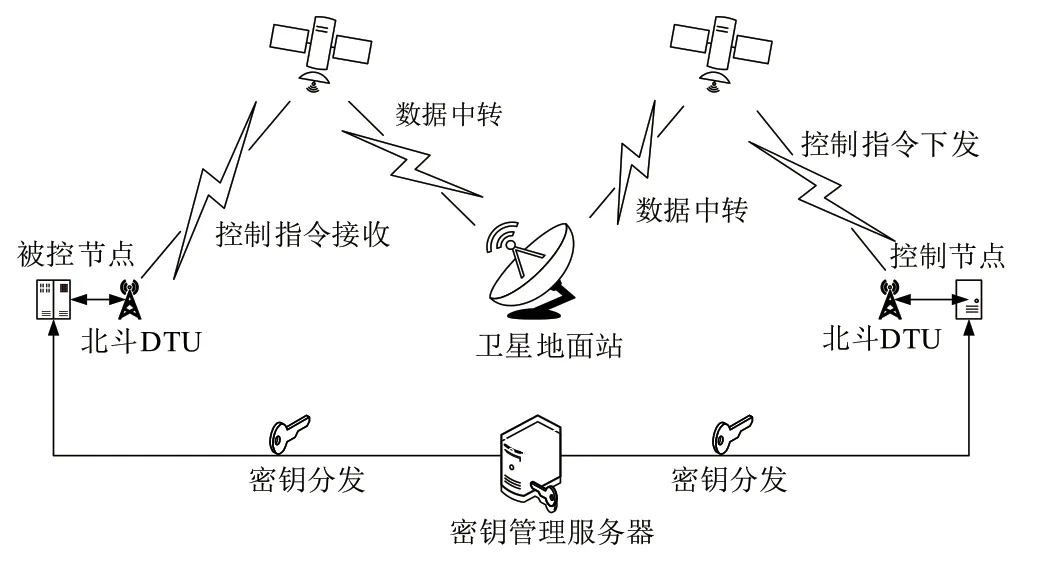
圖6 基于北斗短報文的遠程控制模型基本流程
部署有密鑰管理生成服務的服務器負責生成、下發密鑰給控制節點和被控節點,控制節點基于2.1 節的加密流程,使用分發的SM4 密鑰對控制指令數據進行加密,經北斗DTU 傳輸給北斗衛星,經地面站轉發后到達目標衛星,再下發至被控節點的北斗DTU。被控節點接收到之后,首先使用之前接收到的SM4 密鑰解密,然后根據校驗校驗字節判斷數據完整性,如果數據不完整,則嘗試糾錯或發送重傳請求;如果數據完整,則還原出控制命令并執行。
3 實驗結果
3.1 實驗環境搭建
選用某型8 卡北斗終端設備2 臺,分別部署在北京和廣東惠州,兩地相距約3 000 km,如圖7 所示。同時兩地各配備一臺便攜式筆記本電腦,硬件配置為i5-8250U、8 G RAM、512 G SSD,測試軟件基于Windows 10 專業版和Qt5.0 開發運行,軟件截圖如圖8 所示,界面包括接收消息顯示界面、發送消息顯示界面、待發送消息編輯界面、發送按鈕等。
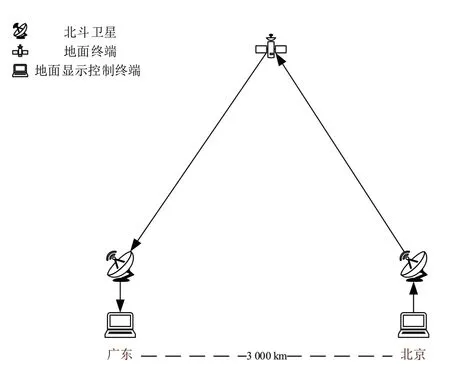
圖7 實驗環境示意圖
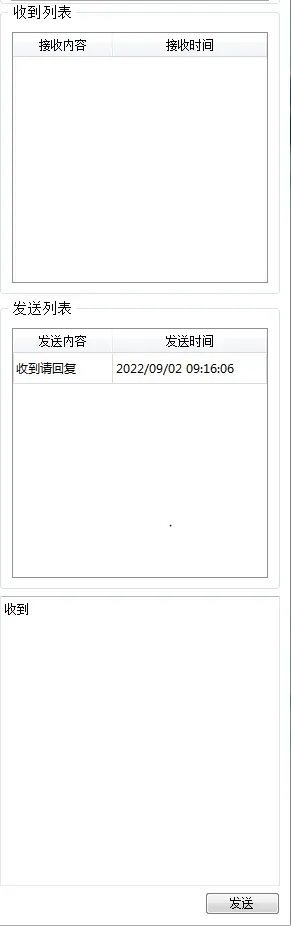
圖8 測試軟件界面
3.2 加解密流程對于鏈路吞吐量的影響
加載基于北斗短消息的遠程控制模型演示軟件,北斗二代短消息最大容量為78 個字節,由于將最后一個字節作為數據校驗字節使用,因此單次短報文最大容量為77 個字節,為充分探索鏈路最大吞吐量,擬將77 個字節全部使用,即B 設備向A 設備發送控制指令“AT+SEND=234007,‘發送測試發送測試發送測試發送測試發送測試發送測試發送測試發送測試發送測試12345’”,該指令模擬核心控制指令的下發流程,即使用北斗短消息向編號為234007 的客戶端發送相關加密信息。為最大限度利用試驗設備的發送頻度,上述發送過程連續進行,計時10 分鐘,記錄A 設備收到的有效控制指令數量,得到數據組1。不加載加解密校驗流程運行演示軟件,執行同樣動作,記錄結果得到數據組2,結果如表1、圖9 所示。數據組1 的平均吞吐量為575.1 Byte/min,數據組2 的平均吞吐量為580.4 Byte/min,由此可見加載加解密流程后鏈路吞吐量降低1%左右,說明加解密流程是高效的,對鏈路吞吐量影響十分有限。
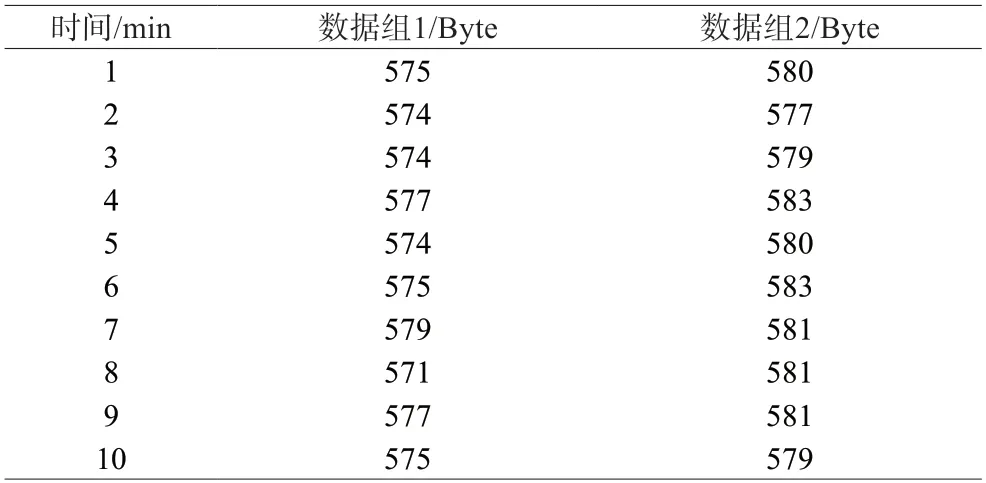
表1 新增加解密流程前后鏈路吞吐量對比
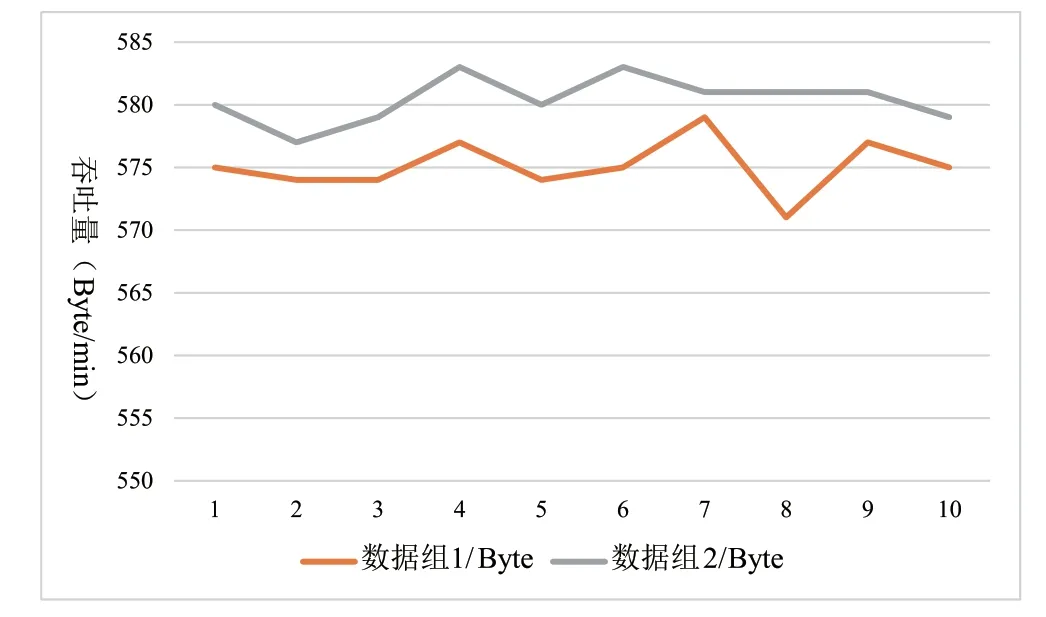
圖9 新增加解密流程前后鏈路吞吐量對比
3.3 加解密流程對于鏈路時延的影響
從信息流入鏈路開始,到信息流出鏈路終止,中間的持續時長即為鏈路時延。鏈路時延的大小能夠有效說明鏈路能否及時傳遞關鍵信息,對于指令的及時下達具有重要意義,因此測試加解密流程對于鏈路時延的影響具有重要意義。為保證實驗結果的有效性,首先手動設置兩臺筆記本電腦其向time.windows.com 同步時間,再加載加解密校驗流程運行演示軟件,B 設備向A 設備不斷嘗試發送控制指令,“AT+SEND=234007,‘發送測試發送測試發送測試發送測試發送測試發送測試發送測試發送測試發送測試12345’”,計時10 分鐘,記錄A 設備收到有效控制指令的事件和B 設備發送時間,并計算二者延時,得到表2;不加載加解密校驗流程運行演示軟件,執行同樣動作,記錄數據結果得到表3。其中表2 中丟包2 次,丟包率3.75%,平均傳輸時延10.59 s;表3 中丟包3 次,丟包率0.25%,平均傳輸時延12.1 s,每分鐘內數據包延遲的平均值見圖10,說明新增加解密流程后鏈路時延沒有明顯變化。
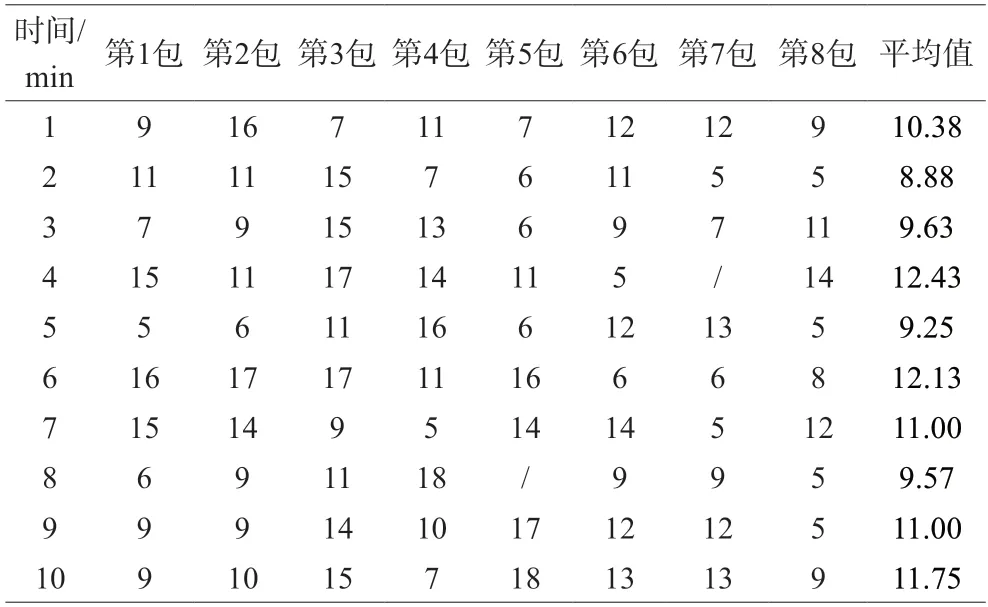
表2 新增加解密流程后鏈路時延表
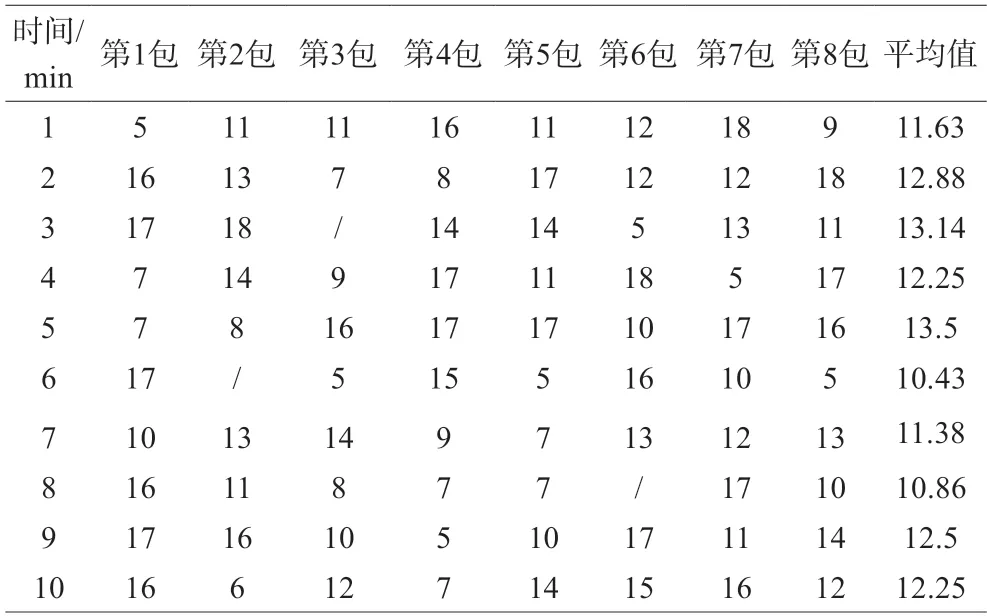
表3 新增加解密流程前鏈路時延表

圖10 新增加解密流程前后鏈路時延平均值對比
4 結束語
由于基于4G、5G 或Wi-Fi 的遠程控制模型具有外部依賴性較強、安全性較差、作用距離近等局限性,本文設計了基于北斗短消息的可信遠程控制模型,該模型通過我國自主設計實現的北斗衛星通信導航系統作為遠程通信鏈路,并使用自主可控的SM4 分組對稱加密方法對數據區進行了加密,能夠有效提高遠程控制鏈路的可靠性和安全性。最后本文使用8 卡北斗終端對以上設計進行了驗證,測試結果表明,基于北斗短消息的遠程控制模型能夠達到97% 以上的傳輸可靠性,并能對傳輸數據進行信源分組對稱加密。但這也帶來了北斗短報文數據區利用率不高的問題,需要在后續研究中進一步完善提高。