空地多源數據融合建模技術在歷史建筑數字化營造中的應用
2022-12-09 08:57:08李道民于海波
工程建設與設計 2022年21期
李道民,于海波
(寧波上航測繪有限公司,浙江 寧波 315200)
1 引言
架站式三維激光掃描可以精準掃描室內外場景,但不便于房頂屋脊及建筑物細部的數據采集,應用機載LIDAR、傾斜攝影測量可以有效解決架站式三維激光掃描儀掃測不到的房頂與屋脊點云數據,應用手持式SLAM 掃描可以有效解決架站式三維激光掃描儀與機載LIDAR 和傾斜攝影測量掃測不到的建筑物細節部分。本文就上述多種測量模式應用于歷史建筑數字化營造進行闡述,介紹空地多源數據的融合方法并對其精度進行評定,對數據融合的難點及解決辦法進行闡述。
2 空地多源點云數據融合目的
歷史建筑數字化營造研究主要包括對歷史建筑內部、外部結構與周邊環境進行復原和創建歷史建筑三維瀏覽動畫。基于三維激光掃描、機載LIDAR、傾斜攝影測量、手持式SLAM 掃描等多種方式可對歷史建筑進行點云獲取并建模,進而對歷史建筑內部與外部結構及周邊環境進行復原。但單項掃描歷史建筑技術手段獲取點云具有一定的局限性[1],不能將歷史建筑內部結構、外部結構與周邊環境點云同時獲取,建模成果不佳,對歷史建筑數字化營造效果不理想。基于上述多種測量方式測得歷史建筑點云數據,融合相關數據并對其建模從而對歷史建筑進行數字化營造。數字化營造三維成果如圖1所示。
3 空地多源點云數據融合方法
點云融合利用特征點匹配算法實現多源數據精確融合,點云融合有3 種融合類型:兩個點云均為相對坐標;兩個點云均為絕對坐標;兩個點云中其一為絕對坐標,其二為相對坐標。
兩個均為相對坐標的點云融合,與三維激光掃描單體架站掃描數據配準原理同理,即利用特征點匹配算法來實現兩種點云精確融合,融合前提為兩個點云目標具有明顯相同特征點,相同特征點愈多融合匹配效果愈好,反之相同特征點愈少,點云融合匹配精度愈差,甚至匹配不上。
兩個均為絕對坐標的點云融合,在3 種融合類型中最為簡便,只需將兩個點云共同導入點云處理軟件中,無須人工或電腦特征點匹配算法配準,即可自行匹配。兩個點云均為絕對坐標,融合前提為兩個點云需轉換為相同坐標系和高程基準下。點云融合成果如圖2所示。
點云數據為絕對坐標與相對坐標進行匹配融合的情況,一般將相對坐標點云配準至絕對坐標點云上。將相對坐標點云配準到絕對坐標點云有兩種類型: 一種相對坐標點云只有平面坐標屬性沒有高程屬性,將該相對坐標點云配準到絕對坐標點云上; 一種相對坐標點云即無平面坐標屬性亦無高程屬性,將該相對坐標點云配準到絕對坐標點云上。第一種,將只有平面坐標屬性沒有高程屬性的相對坐標點云配準到絕對坐標點云上,配準方法類似于兩個絕對坐標點云的配準。因兩套點云平面坐標對應相同,僅高程不對應,只需將相對坐標點云垂直拖動到絕對坐標點云上,拖動相對坐標點云到特征點或特征面重合即可。第二種,既無平面坐標屬性亦無高程屬性的相對坐標點云配準到絕對坐標點云上,配準方法類似于兩個相對坐標點云的配準。即采用特征點匹配算法來實現兩個點云精確融合,該配準方法的前提也是兩個點云目標具有明顯相同特征點,相同特征點愈多融合匹配效果愈好,反之相同特征點愈少,點云融合匹配精度愈差,甚至匹配不上。當然,如果兩個點云因重合特征點少,特征點匹配算法無法將兩個點云配準一體,此時可采用另一種配準方法。該配準方法類似于將只有平面坐標屬性沒有高程屬性的相對坐標點云配準到絕對坐標點云上的配準,即在垂直拖動的基礎上,同時將被配準點云進行旋轉,將該點云通過平移與旋轉最終實現拖動相對坐標點云與絕對坐標點云的特征點或特征面重合。將絕對坐標點云配準到相對坐標點云上,其配準方法類似于兩個相對坐標點云的配準,即利用特征點匹配算法來實現兩點云精確融合,融合前提為兩個點云目標具有明顯相同特征點。
4 空地多源點云數據融合的精度分析
空地多源點云數據的融合精度分析采用內符合與外符合兩種方法。內符合通過內業對點云融合成果進行切片,在切片中對比兩種測量模式的點云分層效果并量取分層距離,即點云融合后同一實際點位的垂直距離。內符合主要對點云融合的相對精度和高程進行分析,外符合通過外業測量歷史建筑特征點獲取絕對坐標,并在內業融合成果中對該特征點進行量取對比,外符合主要對點云融合的絕對精度和平面坐標進行分析。融合點云分層厚度量取如圖3所示。
空地多源點云數據的融合精度取決于兩個點云配準方式,前文所述幾種配準方式中,利用特征點匹配算法配準方式的配準精度相較于拖動、旋轉等配準方式要高,特征點匹配算法配準方式精度取決于兩個點云重合特征點的多少[2]。采用拖動與旋轉方式融合的點云成果以人工配準為準,故點云配準精度較特征點匹配算法略低。
在不考慮單項掃描歷史建筑技術手段點云拼接精度基礎上,即本文中點云精度評比只考慮單項掃描歷史建筑技術手段點云拼接后的整體點云與其他掃描點云技術手段獲得的整體點云之間的拼接精度。融合點云特征點量取如圖4所示。
經實際案例比較,云配準融合的精度評比如下:兩種絕對坐標點云配準融合精度> 將帶有平面坐標屬性(無高程)的相對坐標點云配準到絕對坐標點云的融合精度> 利用特征點匹配算法配準兩種相對坐標點云的融合精度> 利用拖動、旋轉配準兩種點云的融合精度。
5 空地多源數據融合建模在歷史建筑數字化營造中的應用
5.1 案例介紹
以浙江省寧波市某歷史建筑的點云融合為案例,結合三維激光掃描與傾斜攝影測量獲取的兩種點云融合進行分析,采用的點云處理軟件為Trimble Realworks。
為利于不同方式配準的精度對比,本次架站式三維激光掃描儀獲取的點云分別輸出為絕對坐標點云 (絕對坐標點云的平面坐標為CGCS 2000 坐標系,高程基準為正常高基準)與相對坐標點云,傾斜攝影測量獲取的點云輸出平面屬性正常(CGCS 2000 坐標系),高程屬性分別為大地高與正常高的兩種點云。本次點云配準融合分別配準:(1)將三維激光掃描儀獲取的絕對坐標點云與傾斜攝影測量獲取的平面屬性正常(CGC S2000 坐標系)、高程屬性為正常高的點云配準融合;(2)將三維激光掃描儀獲取的絕對坐標點云與傾斜攝影測量獲取的平面屬性正常(CGCS 2000 坐標系)、高程屬性為大地高的點云配準融合;(3)將三維激光掃描儀獲取的相對坐標點云與傾斜攝影測量獲取的平面屬性正常 (CGCS 2000 坐標系)、高程屬性為正常高的點云配準融合。上述3 種配準方式旨在將兩種點云融合為絕對坐標點云(平面坐標為CGCS 2000坐標系,高程基準為正常高)。
5.2 配準方法
1)將三維激光掃描儀獲取的絕對坐標點云與傾斜攝影測量獲取的平面屬性正常(CGCS 2000 坐標系)、高程屬性為正常高的點云配準融合。該兩個點云為統一的平面坐標系統和高程基準的點云,即兩個絕對坐標的點云配準融合,在點云處理軟件Trimble Realworks 中,獲取帶有絕對坐標的點云融合成果[3]。
2)將三維激光掃描儀獲取的絕對坐標點云與傾斜攝影測量獲取的平面屬性正常(CGCS 2000 坐標系)、高程屬性為大地高的點云配準融合。該兩個點云中一個是絕對坐標點云,另一個為僅有統一的平面坐標、高程不統一的相對坐標,在點云處理軟件Trimble Realworks 中將相對坐標點云垂直拖動到絕對坐標點云上,拖動相對坐標點云到特征點或特征面重合,獲取帶有絕對坐標的點云融合成果。
3)將三維激光掃描儀獲取的相對坐標點云與傾斜攝影測量獲取的平面屬性正常(CGCS 2000 坐標系)、高程屬性為正常高的點云配準融合。該兩個點云類型為相對坐標點云配準到絕對坐標點云上,這里采用上節介紹的兩種配準方法進行配準融合。
第一種配準方式,采用特征點匹配算法來實現兩個點云精確融合,即與兩個相對坐標點云的配準融合同理,在融合過程中以傾斜攝影測量獲取的絕對坐標點云為基準點云,將三維激光掃描獲取的相對坐標點云利用特征點匹配算法配準到以傾斜攝影測量獲取的絕對坐標點云上,即可獲得帶有絕對坐標屬性的融合點云[4]。
第二種配準方式,將相對坐標點云通過平移與旋轉最終實現拖動相對坐標點云與絕對坐標點云的特征點或特征面重合,獲得帶有絕對坐標的融合點云。三維激光融合傾斜攝影點云數據前、后成果圖如圖5、圖6所示。
5.3 配準精度分析
本次案例空地多源點云數據的融合的精度分析采用內符合與外符合兩種方法。內符合通過內業對點云融合成果進行切片,切片寬度截取0.1 m,對比三維激光掃描點云與傾斜攝影測量點云重合區域,對比分層情況,并量取該歷史建筑房頂兩點云分層厚度。
經量取本案例點云分層厚度為:三維激光掃描絕對坐標點云與傾斜攝影測量絕對坐標點云融合點云成果分層厚度為0.006 m,即兩點云融合后高程誤差為0.006 m;三維激光掃描絕對坐標點云與傾斜攝影測量相對坐標點云通過垂直拖動傾斜攝影測量點云的融合點云分層厚度為0.0173 m,即兩點云融合后高程誤差為0.0137 m;三維激光掃描相對坐標點云與傾斜攝影測量絕對坐標點云通過特征點匹配算法融合點云的分層厚度為0.037 m,即兩點云融合后高程誤差為0.037 m; 三維激光掃描相對坐標點云與傾斜攝影測量相對坐標點云通過拖動、旋轉三維激光掃描相對坐標點云的融合點云分層厚度為0.045 m,即兩點云融合后高程誤差為0.045 m。三維激光掃描點云數據與傾斜攝影點云數據融合切片成果如圖7所示。
外符合通過外業測量歷史建筑特征點獲取絕對坐標并與內業融合成果對該特征點進行量取對比,本案例外業通過全站儀對歷史建筑特征點進行點測量,同內業分別量取的該特征點傾斜攝影測量點云、三維激光掃描點云和融合點云成果的坐標,本案例中不同配準融合方式特征點坐標對比如表1所示。由表1對比可得:三維激光絕對坐標點云與傾斜攝影絕對坐標點云融合后,特征點較全站儀測量特征點平面坐標誤差≤0.01 m;三維激光絕對坐標點云與傾斜攝影相對坐標點云通過垂直拖動相對坐標點云融合后,特征點較全站儀測量特征點平面坐標誤差為0.02~0.03 m;三維激光相對坐標點云與傾斜攝影絕對坐標點云通過特征點匹配算法融合后,特征點較全站儀測量特征點平面坐標誤差為0.02~0.04 m;三維激光相對坐標點云與傾斜攝影絕對坐標點云通過拖動、旋轉相對坐標點云融合后,特征點較全站儀測量特征點平面坐標誤差為0.04~0.08 m。
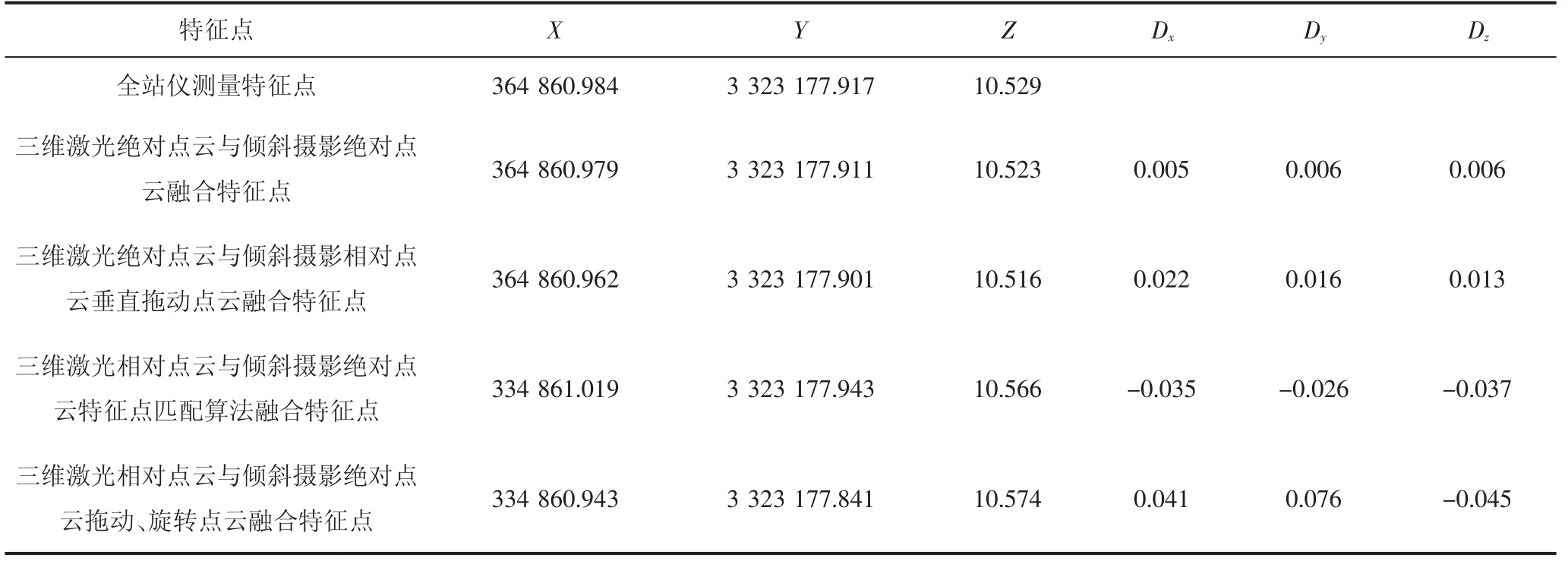
表1 不同配準融合方式特征點坐標對比m
6 結語
本文就基于三維激光掃描、機載LIDAR、傾斜攝影測量、手持式SLAM 掃描等多種方式測量歷史建筑進而對歷史建筑數字化營造的應用進行對比闡述,介紹多種測量方式獲得數據的融合方法并對其精度評比以及融合難點和解決辦法進行闡述。通過具體案例給出了多種測量方式獲得的空地多源數據的融合精度評比結果:即兩種絕對坐標點云配準融合精度>將帶有平面坐標屬性沒有高程屬性的相對坐標點云配準到絕對坐標點云的融合精度> 利用特征點匹配算法配準兩種相對坐標點云的融合精度> 利用拖動、旋轉配準兩種點云的融合精度。空地多源點云數據的融合可大大提高歷史建筑數字化營造的數據完整性,可為歷史建筑數字化營造提供豐富的數據成果,為后續歷史建筑保護和利用提供可靠的數據支持。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
