駕駛風險規避行為的塑造:來自強化理論的解決思路*
2022-12-07 02:41:36張馨予郭羽熙梁佳文李文敏趙苑秀高在峰
應用心理學 2022年6期
鄧 芳 張馨予 郭羽熙 梁佳文 李文敏 趙苑秀** 高在峰
(1.浙江大學心理與行為科學系,杭州 310022;2.長安大學心理健康教育與咨詢中心,西安 710064)
1 引言
對駕駛相關風險的研究一直是道路安全研究主要關注領域,然而如何塑造駕駛人風險規避行為的問題仍未得到很好解決。在實車駕駛中,風險可分為外源性風險與自源性風險。前者不受駕駛人主觀意志影響,由外部刺激導致,如前方異常停車等;后者由駕駛人在駕駛過程中導致,如超速、打電話等。目前研究主要聚焦于對自源性風險的規避與矯正,缺乏對外源性風險的關注。已有的自源性風險規避與矯正方法主要包括教育干預、警察執法和告警三類。這三類方法本質上屬于被動矯正(由外界發出相應信號),效果有限(Eensoo et al.,2018;Walter et al.,2011;Jongen al et.,2011)。如何提高駕駛人對自源性風險的內省認知和規避主動性,培養其對外源性風險的危險感知能力和規避意識,從而實現道路風險主動防控是目前需解決的難題之一。同時,駕駛相關風險的類型多、特點散、發生隨機性強,如何提供一種統一的方案應對所有可能的風險也亟須解決。
對于駕駛風險規避行為的塑造,基于行為主義的強化理論具有較強的適用性和應用價值。根據強化理論,行為的習得與及時強化有關,經過強化的行為更大概率重復發生(Skinner,1958;Skinner,1965)。在行為塑造中,強化與懲罰起不同作用(Skinner,2019)。強化是指隨著特定行為產生,出現愉快刺激增加或刺激強度的增強(正強化)或不愉快刺激減少或者刺激強度的減弱(負強化),從而導致該行為發生概率增加(Ferster&Skinner,1957)。懲罰是指一個行為發生伴隨著不愉快刺激出現(正懲罰)或愉快刺激消除(負懲罰),導致該行為后續出現頻率減少(Skinner,1965)。近15年來,強化理論逐漸被應用于提升道路交通 安 全(e.g.,Bolderdijk et al.,2011;Hultkrantz & Lindberg,2009;Lahrmann et al.,2012;Lansdown & Saunders,2012;Mazureck & van Hattem,2006;Mullen et al.,2015;Reagan et al.,2013)。由于駕駛過程中無法實時增減滿足基本生理需要的初級強化物(如水、溫暖等),這類研究均選用最初無強化效力但與初級強化物多次配對后將獲得強化效力的次級強化物,即代幣,來實時獎懲。代幣可以在后續實驗允許的任何時間地點被用于兌換初級強化物,從而滿足有機體的某種愉快刺激的需求,使有機體保持高水平的獲取代幣期望,極力表現期望行為,回避不良行為(Doll et al.,2013)。目前,這類基于積分的強化措施已應用于移動設備,如eMentoring app(Peer et al.,2020)。
然而,以往研究主要探討強化與懲罰對自源性風險規避的作用,忽略了對外源性風險規避行為的塑造。對外源性風險,應采用獎勵強化駕駛人的安全應對行為;而對自源性風險,則應采用懲罰減少駕駛人的不安全行為。此外,為提高行為主體的主動性與積極性,強化理論所強調的差異化塑造原則建議根據目標對象的性質采用不同程度的強化物。因此,有必要進一步探明哪種強化規則更有效。為此,本研究將探討能否通過對外源性風險規避行為與自源性風險行為分別采用正強化與負懲罰的方法,來實現對駕駛風險規避行為的塑造,并探明更優的強化規則。鑒于超速和追尾的普遍性(Pires et al.,2020;陳晨等,2011)和危害性(Kim et al.,2022),我們選取超速作為內源性風險代表,突降異物(用于模擬追尾和其他碰撞)作為外源性風險代表。
2 實驗一 風險等級—積分負懲罰力度匹配實驗
本實驗以超速為自源性風險代表,考察基于風險水平的差異化懲罰能否有效推動駕駛人主動規避超速行為。我們將超速10%~20%定義為低風險,超速20%~50%定義為高風險。
2.1 方法
被試自愿報名,所有被試具有C1駕照和駕駛經驗,視力、聽力狀況良好,在近一年內的高速公路累計駕駛時間至少3個小時。被試分為3組:風險-積分匹配組(根據風險水平給予相應積分懲罰)、低懲罰組(總是低懲罰)、高懲罰組(總是高懲罰)。高懲罰組14人(7名女性),平均年齡23.00歲(SD=0.43),平均駕齡2.21年(SD=0.13);低懲罰組14人(5名女性),平均年齡24.36歲(SD=0.82),平均 駕齡3.29年(SD=0.76);風險-積分匹配組14人(9名女性),平均年齡23.93歲(SD=1.02),平均駕齡3.25年(SD=0.30)。三組被試在年齡、駕齡上匹配(p>0.05)。
實驗采用六自由度駕駛模擬器模擬自動駕駛環境(圖1)。模擬駕駛器計算機刷新率為60Hz,駕駛場景呈現在三面LED顯示器(分辨率為1920×1080),相鄰兩屏間夾角為150°,形成環繞效果。實驗程序采用Unity3D引擎編寫,模擬自動擋車輛。駕駛場景為包括大橋(限速80km/h)和隧道(限速60km/h)的高速公路,其余路段限速為100km/h。周圍車輛密度為每千米20輛車(不含自身)。其他場景設置詳見網上附錄材料。

圖1 六自由度模擬駕駛器
實驗采用2(積分系統:有、無;被試內)×3(積分規則:高懲罰、低懲罰、風險-積分匹配;被試間)的混合設計。初始積分為100分。若超速持續6秒:風險-積分匹配組超出當前限速10~20%范圍內扣5分,超出當前限速20~50%范圍內扣15分;高懲罰組超速扣15分;低懲罰組超速扣5分。實驗按時間先后分為無積分系統(20分鐘)、有積分系統(20分鐘)兩階段以避免積分系統對無積分階段的干擾;兩階段間至少休息3分鐘。在無積分系統階段,系統仍會按相應規則計算積分,但積分面板不出現。在有積分系統階段,車輛中控屏位置呈現積分面板(見圖2),實時顯示積分情況,包括總積分、扣除積分及其原因(如“您因連續超速扣除積分5分”)。為避免路況熟悉性的影響,兩階段實驗中所用的道路場景為同質的不同路段。實驗中若被試超速,系統會持續發出聽覺告警提示音。實驗開始前,被試在模擬器上進行5分鐘的駕駛以熟悉駕駛設備的操作。正式實驗需要約40分鐘,并根據積分情況支付額度不等的被試費。每位被試在實驗前均閱讀制定的指導語(見網上附錄材料)。

圖2 有積分系統(a)和無積分系統(b)的界面示例
研究采用駕駛平均速度、超速比例(駕駛人在實驗中出現超速行為的時長占總駕駛時長的比例)作為因變量。對數據采用2(積分系統)×3(積分規則)重復測量方差分析。鑒于積分系統的效果是研究的關注對象,故通過事前配對t檢驗來分析積分系統作用。
2.2 結果與討論
平均速度見圖3(a)。積分系統主效應顯著(F(1,39)=22.23,p<0.001,BF10=183.76,η2p=0.36),有積分系統下的駕駛速度顯著低于無積分系統。積分規則主效應不顯著(F(2,39)=0.36,p=0.701,BF10=0.30,η2p=0.02)。積分系統與積分規則的交互作用顯著(F(2,39)=5.83,p=0.006,BF10=7.85,η2p=0.23)。事前比較發現,高懲罰下有積分系統的駕駛速度顯著低于無積分系統階段(t(13)=-3.34,p=0.005,BF10=9.56,Cohen’s d=-0.89);低懲罰下不顯著(t(13)=-0.58,p=0.573,BF10=0.31,Cohen’s d=-0.16);風險-積分匹配下有積分系統的駕駛速度顯著低于無積分系統階段(t(13)=-3.51,p=0.004,BF10=12.56,Cohen’s d=-0.94)。
超速比例見圖3(b)。積分系統主效應顯著(F(1,39)=23.31,p<0.001,BF10=410.17,η2p=0.37),有積分系統下的超速比例顯著低于無積分系統。積分規則主效應不顯著(F(2,39)=2.08,p=0.139,BF10=0.92,η2p=0.10。積分系統與積分規則的交互作用顯著(F(2,39)=3.39,p=0.04,BF10=1.53,η2p=0.15)。事前比較發現,高懲罰下有積分系統的超速比例顯著低于無積分系統階段(t(13)=-3.44,p=0.004,BF10=11.25,Cohen’s d=-0.92);低懲罰下差異不顯著(t(13)=-1.25,p=0.23,BF10=0.52,Cohen’s d=-0.33);風險-積分匹配下有積分系統的超速比例顯著低于無積分系統階段(t(13)=-3.44,p=0.004,BF10=11.12,Cohen’s d=-0.92)。
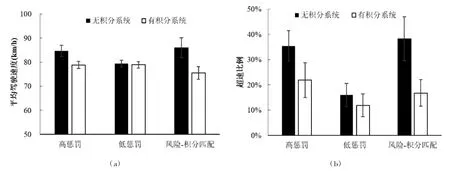
圖3 被試在不同實驗條件下的平均駕駛速度(a)、超速比例(b)情況。誤差線代表標準誤差
本實驗發現,積分系統有效降低了駕駛人的駕駛平均速度與超速比例;同時,積分系統僅在高懲罰、風險-積分匹配情況下效果達到顯著水平。鑒于高懲罰系統對應成本更高的獎懲系統,故風險-積分匹配的積分系統設置更優。
3 實驗二 風險等級—積分正強化力度匹配水平實驗
本實驗考察基于風險水平的差異化正強化能否提升駕駛人對外源性風險的主動規避。實驗中在行駛過程中前方道路300m處路燈或交通指示牌突然掉落為低風險情況,前方道路100m處發生突然掉落為高風險情況。
3.1 方法
高獎勵組15人(9名女性),平均年齡24.40歲(SD=0.98),平均駕齡3.27年(SD=0.61);低獎勵組15人(8名女性),平均年齡24.13歲(SD=0.64),平均駕齡2.57年(SD=0.48);風險-積分匹配組15人(5名女性),平均年齡23.13歲(SD=0.59),平均駕齡2.78年(SD=0.51)。三組被試在年齡、駕齡上匹配(p>0.05)。
本實驗采用2(積分系統:有、無)×3(積分規則:高獎勵、低獎勵、風險-積分匹配)的混合設計。風險-積分匹配組在前方300m出現障礙物且成功規避時得到5分獎勵,在前方100m出現障礙物且成功規避時得到15分獎勵;高獎勵組總是被獎勵15分;低獎勵組總是被獎勵5分。在正式實驗中,掉落障礙物是路燈或路牌(見圖4),僅發生在大橋、隧道路段。預設的掉落位置模式有兩種:3000m、6000m、8000m、13000m,或2000m、5000m、8000m、12000m(均相對于正式實驗初始位置),模式選取在被試間平衡。在有積分系統階段,車輛中控屏會給出超速告警和躲避障礙物成功提示。
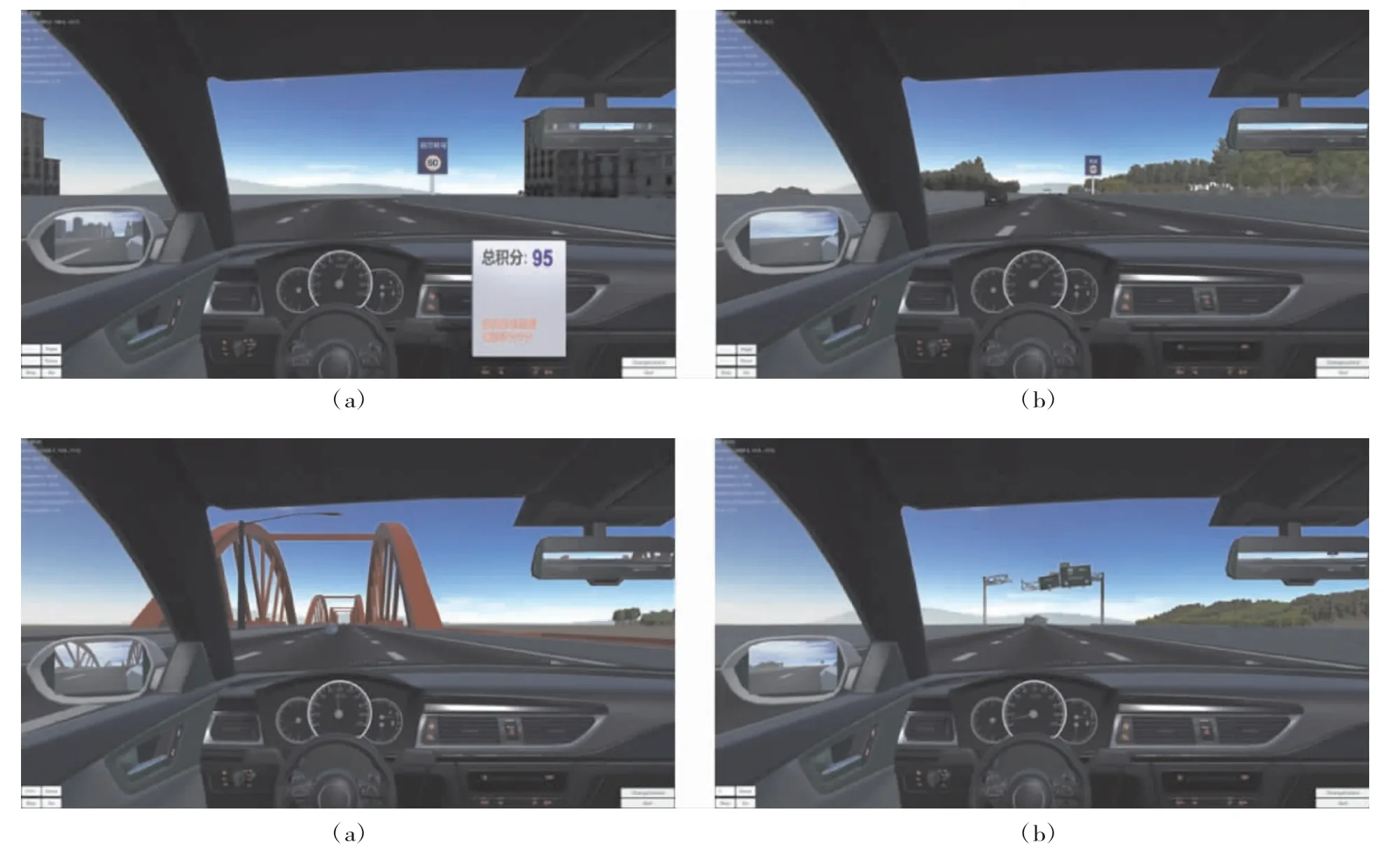
圖4 兩類掉落障礙物路牌(a)、路燈(b)截圖
實驗采用平均速度、超速比例和成功規避障礙的次數作為因變量。其中,成功規避碰撞次數在所有條件下均到天花板,不做分析。
其余與實驗一相同。
3.2 結果與討論
平均速度見圖5(a)。積分系統的主效應不顯著(F(1,42)=0.10,p=0.755,BF10=0.22,η2p<0.01)。積分規則主效應不顯著(F(2,42)=0.18,p=0.840,BF10=0.37,η2p<0.01)。積分系統與積分規則的交互作用不顯著(F(2,35)=2.19,p=0.125,BF10=0.79,η2p=0.09)。事前比較發現,高獎勵下有積分系統的駕駛速度顯著低于無積分系統階段(t(14)=-2.52,p=0.025,BF10=2.68,Cohen’s d=-0.65);低獎勵下差異不顯著(t(14)=1.32,p=0.208,BF10=0.54,Cohen’s d=0.34);風險-積分匹配下差異不顯著(t(14)=-0.68,p=0.510,BF10=0.32,Cohen’s d=-0.18)。
超速比例見圖5(b)。積分系統主效應顯著(F(1,42)=16.23,p<0.001,BF10=46.18,η2p=0.28),有積分系統下的超速比例顯著低于無積分系統。積分規則主效應不顯著(F(2,42)=0.09,p=0.919,BF10=0.28,η2p<0.01)。積分系統與積分規則的交互作用顯著(F(2,42)=5.04,p=0.011,BF10=4.96,η2p=0.19)。事前比較發現,高獎勵下有積分系統的超速比例顯著低于無積分系統階段(t(14)=-3.99,p=0.001,BF10=30.05,Cohen’s d=-1.03);低獎勵下差異不顯著(t(14)=0.24,p=0.816,BF10=0.27,Cohen’s d=0.06);風險-積分匹配下有積分系統的超速比例顯著低于無積分系統階段(t(14)=-3.23,p=0.006,BF10=8.40,Cohen’s d=-0.83)。
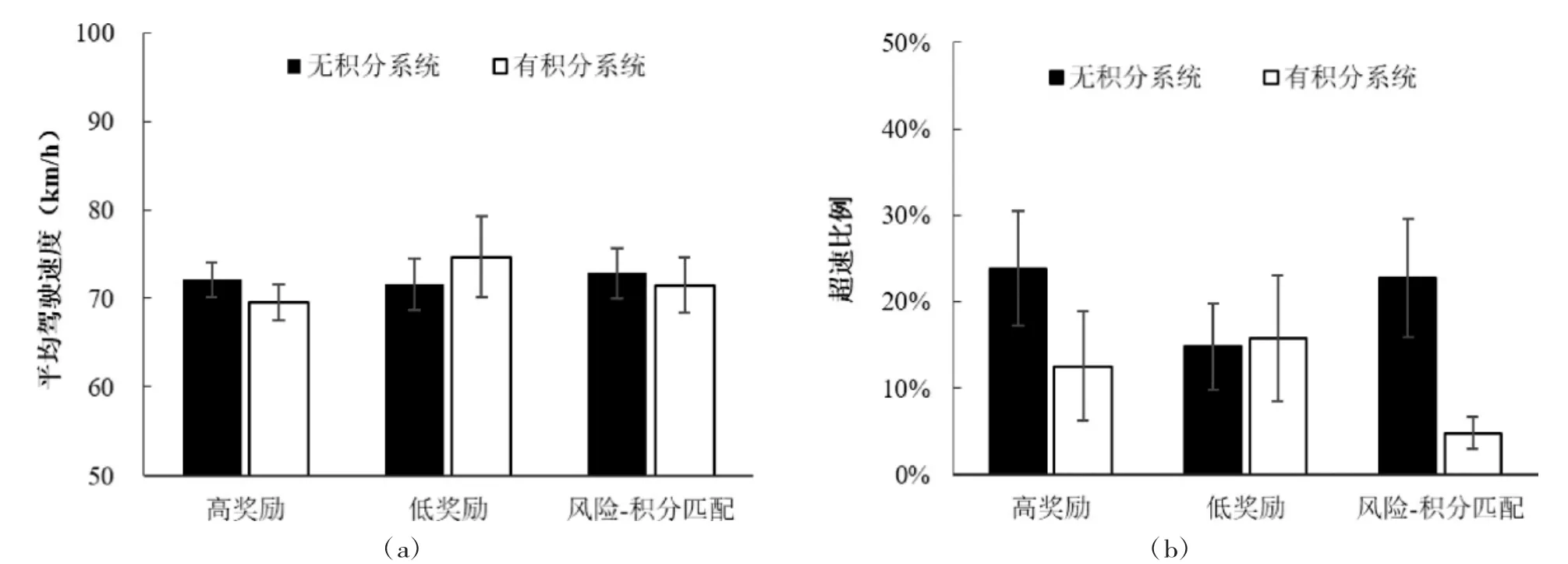
圖5 被試在不同實驗條件下平均駕駛速度(a)、超速比例(b)。誤差線代表標準誤差
本實驗發現,積分系統在影響平均速度方面效果不明顯,但是顯著降低了超速比例。積分系統只有在高懲罰、風險-積分匹配情況下效果達到顯著水平。鑒于高獎勵系統成本更高,因此風險-積分匹配的積分系統,即基于風險水平的差異化獎勵,設置更優。
4 實驗三 正強化與負懲罰的聯合效果實驗
本實驗旨在建立包含正強化與負懲罰的積分系統,考察完整的代幣矯正技術能否有效減少駕駛中的高風險駕駛行為。本研究采用了包含大橋、隧道、急轉彎與長下坡四種高速公路場景。
4.1 方法
42位有效被試參加實驗。高獎懲組14人(9名女性),平均年齡23.43歲(SD=0.64),平均駕齡2.57年(SD=0.48);低獎懲組14人(8名女性),平均年齡23.36歲(SD=0.48),平均駕齡2.64年(SD=0.43);風險-積分匹配組14人(7名女性),平均年齡為22.71歲(SD=0.37),平均駕齡2.39年(SD=0.39)。三組被試在年齡、駕齡上匹配(p>0.05)。
駕駛場景為雙向6車道高速公路,包含直道(限速100km/h)、隧道(限速60km/h)、大橋(限速80km/h)、彎道(限速60km/h)和匝道(限速80km/h)路段,總長16km。其余路段限速為100km/h。隧道(長2km)、大橋(長2km)分別出現一次,間隔1km,四種場景出現順序在被試間平衡。最后路段模擬高速公路出口U形路線,彎道(90度,半徑125m)間隔1km出現兩次后,再間隔1km,匝道(長3.3km,高度落差132m)出現一次。為規避被試對場景的熟悉度不同而造成潛在干擾,實驗中4種場景的出現順序存在兩種:隧道、大橋、急轉彎與長下坡依次出現,急轉彎、長下坡、大橋、隧道依次出現,四種場景間均以直道相連。上述兩種場景順序分別應用于有、無積分系統兩種條件。同時,道路兩側的其他信息(如樹木、建筑物、路牌等)在兩種積分系統條件下隨機出現。
本實驗采用2(積分系統)×3(積分規則)的混合設計。高獎懲組總是被獎勵或懲罰15分;低獎懲組總是被獎勵或懲罰5分;風險-積分匹配組在高風險下被獎勵或懲罰15分,在低風險下別獎勵或懲罰5分。實驗按時間先后分為無積分系統(25分鐘)、有積分系統(25分鐘)兩個階段,其間至少休息3分鐘。
實驗采用駕駛平均速度、出現障礙物前后500m的平均速度、超速比例作為因變量。由于實驗二結果發現成功規避碰撞的次數績效出現天花板效應,因此本研究記錄出現障礙物前后500m的車輛速度,以更好地檢驗積分系統對躲避碰撞行為的影響。
其余與實驗2一致。
4.2 結果與討論
平均速度見圖6(a)。積分系統主效應顯著(F(1,39)=17.55,p<0.001,BF10=97.05,η2p=0.31),有積分系統下的駕駛速度顯著低于無積分系統。積分規則主效應不顯著(F(2,39)=2.24,p=0.120,BF10=0.98,η2p=0.10)。積分系統與積分規則的交互作用邊緣顯著(F(2,39)=2.45,p=0.099,BF10=0.81,η2p=0.11)。事前比較發現,高獎懲下有無積分系統的駕駛速度差異不顯著(t(13)=-1.15,p=0.272,BF10=0.47,Cohen’s d=-0.31);低獎懲下有無積分系統的平均速度差異邊緣顯著(t(13)=-2.11,p=0.055,BF10=1.47,Cohen’s d=-0.56),有積分系統下的平均速度較低;風險-積分匹配下有積分系統的駕駛速度顯著低于無積分系統階段(t(13)=-3.88,p=0.002,BF10=22.86,Cohen’s d=-1.04)。
超速比例見圖6(b)。積分系統的主效應不顯著(F(1,39)=0.88,p=0.354,BF10=0.35,η2p=0.02),積分規則主效應不顯著(F(2,39)=0.92,p=0.408,BF10=0.29,η2p=0.05),積分系統與積分規則的交互作用不顯著(F(2,39)=0.01,p=0.991,BF10=0.18,η2p<0.01)。事前比較發現,高獎懲下有無積分系統兩階段間差異不顯著(t(13)=-0.50,p=0.624,BF10=0.30,Cohen’s d=-0.13);低獎懲下差異不顯著(t(13)=-0.85,p=0.409,BF10=0.37,Cohen’s d=-0.23);風險-積分匹配下差異亦不顯著(t(13)=-0.50,p=0.624,BF10=0.30,Cohen’s d=-0.13)。

圖6 被試在不同實驗條件下的平均駕駛速度(a)、超速比例(b)。誤差線代表標準誤差
出現障礙物前后500m的平均速度見圖7。積分系統的主效應顯著(F(1,39)=17.26,p<0.001,BF10=72.29,η2p=0.31),有積分系統下的平均速度顯著低于無積分系統。積分規則主效應邊緣顯著(F(2,39)=2.83,p=0.071,BF10=1.39,η2p=0.13)。積分系統與積分規則的交互作用顯著(F(2,39)=3.35,p=0.045,BF10=1.67,η2p=0.15)。事前比較發現,高獎懲條件下有無積分系統的平均速度差異不顯著(t(13)=-0.78,p=0.448,BF10=0.35,Cohen’s d=-0.21);低獎懲條件下有積分系統下的平均速度顯著低于無積分系統情況(t(13)=-2.57,p=0.023,BF10=2.88,Cohen’s d=-0.69);風險-積分匹配條件下有積分系統下的平均速度顯著低于無積分系統情況(t(13)=-3.80,p=0.002,BF10=19.88,Cohen’s d=-1.02)。
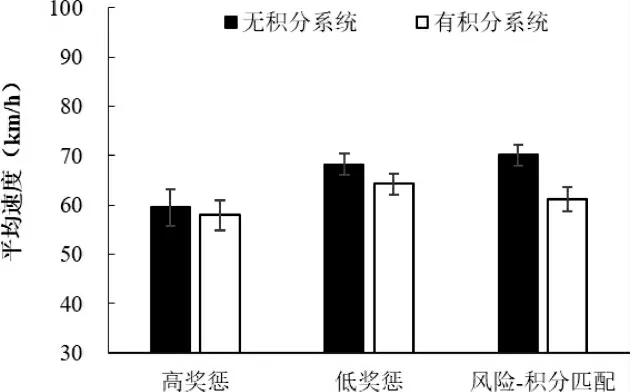
圖7 被試在不同實驗條件(積分規則)下出現障礙物前后500m的平均速度。誤差線代表標準誤差。
研究發現,積分系統有效降低了被試的駕駛平均速度和出現障礙物前后500m的平均速度。事前比較進一步發現,積分系統只有在風險-積分匹配情況下效果達到顯著水平。因此風險-積分匹配的積分系統,即基于風險水平的差異化獎罰,設置最優。
5 總討論
本研究將基于強化理論的行為塑造思路引入高速公路的風險駕駛行為告警中,通過仿真實驗發現,無論是面對自源性風險還是外源性風險,基于強化理論的代幣系統均可有效塑造駕駛人的風險規避行為,且適用于不同駕駛場景(如大橋、隧道、急轉彎等)。具體而言,對于自源性風險的自助矯正,結果顯示超速時長比例可從38%降低到17%(實驗1)或從23%降低到5%(實驗2)。對于突發外源性風險的主動規避,可以從規避的結果和過程兩個方面來衡量。在結果方面,我們考察了駕駛人能否成功規避該風險,但實驗2結果顯示被試均成功規避了所有外源性風險;在過程方面,我們考察了駕駛人能否及時發現并規避風險,能否適時降低車速,結果顯示出現障礙物前后500m的平均速度可從70km/h降低到61km/h(實驗3)。此外,相較于統一高獎懲和統一低獎懲,根據風險等級設置獎懲幅度的代幣系統效果最佳,提示與風險等級匹配的差異化強化更值得推薦。本方案實現了對駕駛相關風險規避由被動矯正轉向主動實施,初步構建了基于強化理論的駕駛風險規避行為的差異化塑造技術。
本方案將有效彌補我國現有駕照積分系統的不足之處。首先,相較于完全基于懲罰(即扣分)的駕照積分系統,引入正強化(即加分)的代幣系統將通過實時獎勵和最終獎勵促使駕駛人產生外源性動機,對風險規避分配更高的優先級(Reagan&Bliss,2013)、投入更多認知資源和努力,并在限速內駕駛的時間增多(Lansdown & Saunders,2012)。其次,駕照積分系統無法將所有自源性風險(如跟車過近等)立法偵查,而本方案可涵蓋更廣泛的自源性風險,塑造更全面的風險規避行為。最后,相較于駕照積分系統的間斷執法(如超速拍照),本方案基于連續行為的實時反饋和實時積分變動提示更有助于駕駛人實時自助規避風險,保持和養成安全交通行為習慣。因此,本方案在低頻執法路段的優勢將更加明顯。
本項目具有較強的適用性與可實施性,順應了交通安全管理的國際發展趨勢。得益于物聯網和自動駕駛技術的發展,使得基于強化理論的實時獎懲反饋與行為塑造成為可能。目前有關搭載智能車速適應(intelligent speed adaption,ISA)系統的法規在歐洲和日本等地得到迅速推進。ISA系統“知道”當前限速并能據其向駕駛人反饋或限制最高車速,幫助駕駛人保持適當速度(Carsten&Tate,2005)。ISA立法將對車輛動力經濟性和駕乘體驗等方面產生重大影響,需盡快開展相關研究及準備工作。本研究提出的代幣系統可作為ISA的核心內容或架構,該系統不僅配有限速告警功能,并通過差異化獎懲令駕駛人直觀感受到不同車速的風險水平不同。此外,不同于傳統的ISA,代幣系統將安全駕駛行為量化的機制,有助于推動該系統與車險公司合作,如積分可折算抵扣部分保費(Bolderdijk et al.,2011;Lahrmann et al.,2012),識別高風險潛在人群。需指出,未來需要做真實路況下的實證研究,進一步檢驗本系統的穩定性,并優化相關參數設計(如反饋時間、獎懲額度等)。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
小讀者(2020年2期)2020-03-12 10:34:06
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
趣味(語文)(2018年1期)2018-05-25 03:09:58
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55