RGV小車液壓舉升機構同步運動設計
2022-12-03 06:39:18楊林王鏑金福凱
汽車工藝師 2022年11期
楊林,王鏑,金福凱
沈陽新松機器人自動化股份有限公司 遼寧沈陽 110168
隨著工業自動化及智能化的發展,越來越多的工廠開始利用RGV小車運轉大型工件,來代替人工的吊運工作[1],從而降低工人勞動強度,減少人員成本。例如:罐體、車架以及龍門架等一系列大型結構件焊裝工作時,半成品的轉運都逐漸采用RGV來執行。而這些工件的尺寸往往達到十幾米,甚至更長。因此在RGV車舉升機構設計上就需要靠左右兩個舉升機構來承接工件,通過增加受力點使工件能更穩定地落在RGV小車上[2]。但隨之而來的問題是當RGV小車取放工件時,這兩個舉升機構必須同步運動才能保證工件平穩運動。常規的解決辦法是在每個舉升機構油缸管路上加一個機械式的調速閥,通過調速閥調整油缸液壓油的流量[3]。這樣,通過前期多次的舉升試驗,就會找到一個合適的閥開度,使舉升機構能夠同步運動。但是,這種方法應用在產品頻繁更換或不同產品的重心偏移很大時,之前的同步參數不適用于新的產品了,還得需要重新調整閥的開度,進行示教。這樣,產品在換型時,就會變得很麻煩。因此,本文針對此問題進行研究,設計了一種穩定高效的液壓舉升同步系統。
硬件組成
液壓舉升系統主要由PLC控制單元、液壓舉升單元以及位置測量單元組成。其中PLC控制單元主要用于液壓舉升單元的控制及數據采集,液壓舉升單元為工件舉升的執行器,位置測量單元用于反饋舉升支架的實時高度,從而達到閉環控制的目的。
1.PLC控制
PLC控制單元為整個控制系統的核心。鑒于RGV本身有PLC控制器,所以同步功能的實現直接借用RGV自身的PLC即可。PLC為施耐德TM241系列控制器,需要額外增加TM3AI4模擬量輸入模塊,用于采集舉升機構位置信息以及液壓站溫度、壓力等模擬量信息。增加TM3AQ2模擬量輸出模塊,用于控制液壓伺服閥,從而調整伺服閥的輸出(±10V)。對于液壓站內的其他IO控制信號可直接接入PLC的IO點上。整個PLC控制單元的硬件組成如圖1所示。
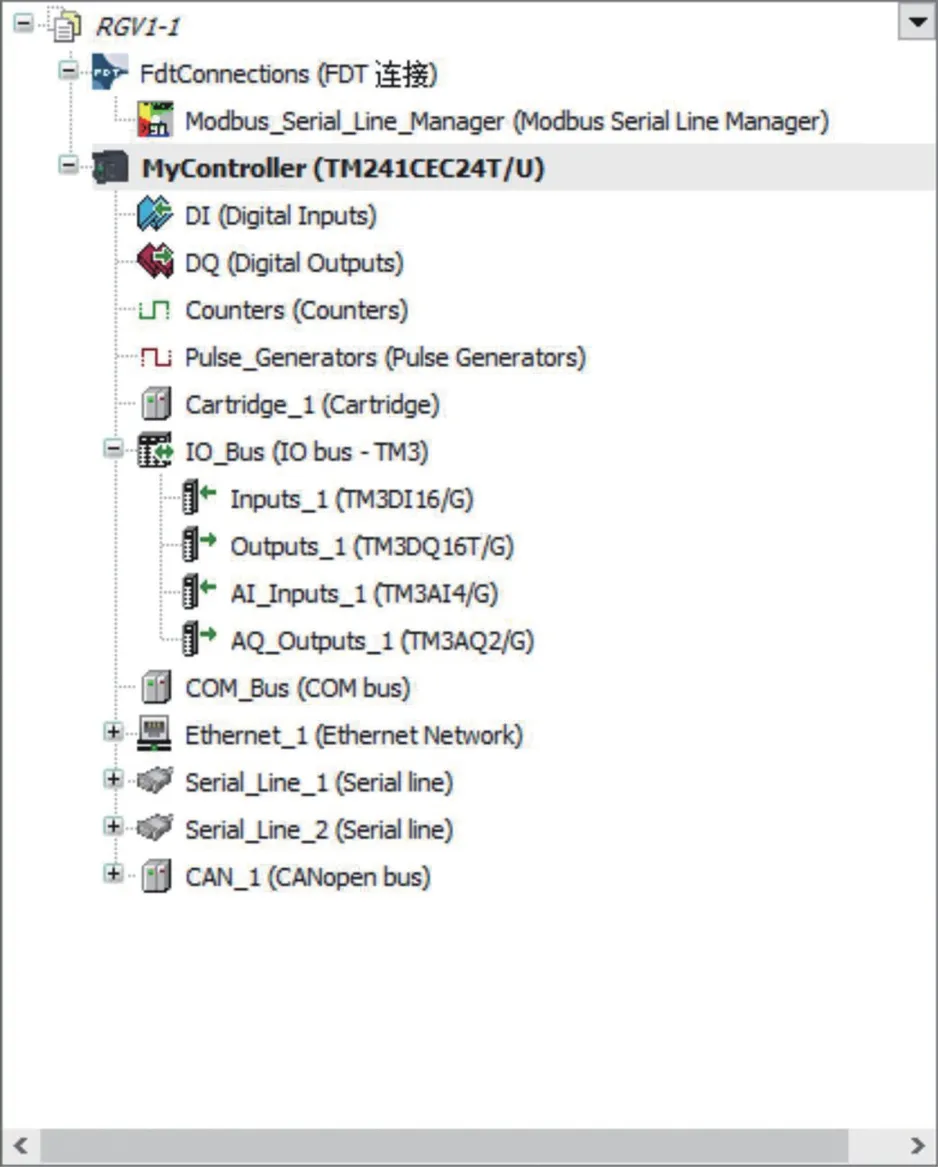
圖1 PLC控制器硬件組成結構
2.液壓舉升
液壓舉升單元主要由液壓站、剪刀叉舉升機構、油缸、單相閥及伺服閥等元器件組成,如圖2所示。液壓站起動后,高壓定量齒輪泵將液壓油注入到油缸管路中去。如果控制油缸動作的伺服閥和電磁球閥沒打開,則液壓油通過溢流閥流回到液壓站內。當給伺服閥施加正向打開信號時,如果電磁球閥接通,液壓油從油缸底部流入油缸內,油缸桿帶動剪刀叉上升;當給伺服閥施加反向打開信號時,液壓油從油缸頂部流入油缸內,如果電磁球閥接通,油缸桿底部油回流到液壓站內,油缸桿帶動剪刀叉下降;當伺服閥開度為0或電磁球閥關斷時,油管內的液壓油被封閉,整個油路系統處于保壓狀態,從而保證整個舉升機構的平衡,剪刀叉不至于回落。此外,為了增加液壓系統的安全性,系統配備了防爆閥、溫度傳感器、壓力傳感器以及液位傳感器等檢測元件,從而保證系統的安全運轉。

圖2 液壓舉升機構示意
3.位置測量
舉升機構左右兩側各配備一個拉繩位移傳感器,用于實時檢測舉升機構的高度。該傳感器測量范圍為0~500mm,線性精度為±0.05%,重復性精度0.01%,脈沖輸出分辨率0.002mm。
由于機械結構安裝時有一定的高度差,舉升機構落到最低處時,拉繩位移傳感器的輸出位置未必是0mm,并且兩側反饋的位移值也未必相同。所以,為了保證兩端位移相同,需要在PLC程序上對機構的位移進行標定零點處理。以一個拉繩位移傳感器為例,對機構標零點進行介紹:首先,將左右平臺降至最低點,并保證兩個平臺平齊;其次,選擇標零點模式;最后,按下開始標零點按鈕,讀出拉繩傳感器當前的數值記為Pos_Offset,PLC對該數值進行存儲。至此,標零點工作結束。
標零工作結束后,舉升機構運動的實際高度還需要進行處理。當舉升機構運動時,讀出拉繩傳感器的輸出值記為Pos_Vis,那么舉升機構運行的實際值Pos_Act可由下式表示:

軟件控制
本系統對液壓舉升機構的控制采取主從隨動的同步控制方式。即以其中一個舉升機構的液壓缸為主動缸,另一個舉升機構的液壓缸為從動缸,主動缸與從動缸的硬件配置完全相同。
為了適應多種產品的需求,兩舉升機構可能會出現無高度差升降同步和帶高度差升降同步兩種狀態。即左右升降機構的高度差可以為0,也可以為正值或負值。因此,本文將兩舉升機構同步運動時需要的高度差設為一個可設置的變量,并存儲到觸摸屏配方中去。當有不同高度差的需求時,只需根據產品類型自動切換配方即可。切換完配方,兩個舉升機構需要先運動到高度差設定的姿態,輸出對應姿態號才能開始同步運轉。
開始同步運動時,首先給出運動的目標位置,主動側液壓缸根據目標位置按照設定的速度運行,從動側液壓缸根據設定的速度方向判斷自己運動是上升或下降。當主動側的升降機構實際位置值與從動側升降機構的實際位置值之差大于同步設定偏差值4mm以上時,說明從動側升降機構運動過慢。如果從動側的伺服比例閥沒達到最大的開度10V,則每隔100ms從動側的伺服閥開度增加0.1V。通過擴大從動側伺服閥的開度來追趕主動升降機構的運動,從而保證主從升降機構之間的高度差在設定值范圍內。反之,當發現從動機構比主動機構高時,在從動機構伺服閥開度未降到最低開度2V時,從動機構伺服閥的開度每隔100ms減0.1V。通過減小從動機構伺服閥的開度來實現兩平臺的同步運行。當舉升機構同步下降時,也是同一個原理,只是伺服比例閥的開度變位負值。
當然,整個液壓舉升系統為了防止運動過程中同步偏差過大出現意外的情況,系統也設置了兩舉升機構同步偏差容忍值。如果兩平臺同步運行過程中,位置偏差除了設定的偏差外,高度差超過15mm(此值可根據需求設置)則認為同步過程失敗,液壓舉升系統應該立即停機報警。此外,整個控制系統對舉升機構的運行距離也做了限制,最大運行高度為400mm,最小運行高度為-5mm。當運行超過這個高度時系統報警,切斷該方向的運動使能,使其只能往相反的方向運動。
結語
本文完成了RGV小車上舉升機構同步運動的設計,并實現了多種產品舉升時舉升機構能自動同步的需求。現將幾組實驗數據列出見表1。
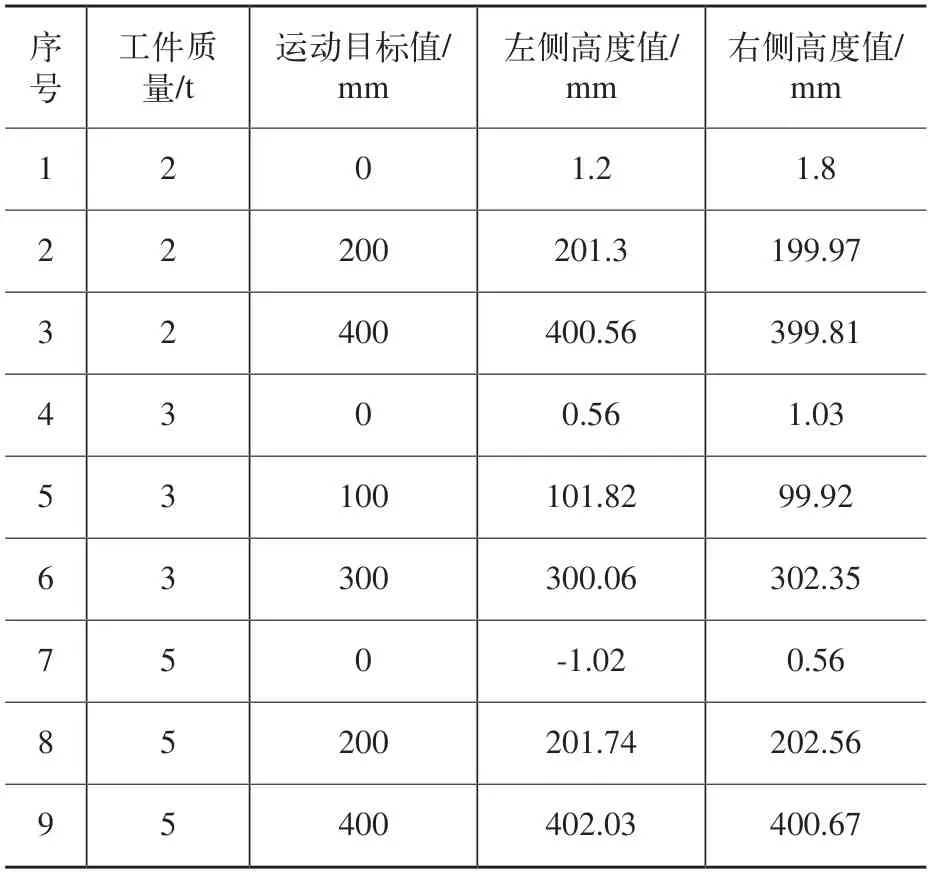
表1 同步舉升位置實驗表
從表中數據上看,左右高度偏差值始終在3mm范圍內,滿足控制系統的要求。并且該系統已經應用到實際工程項目中去,得到了穩定生產驗證。