無位置傳感器無刷直流電機(jī)控制系統(tǒng)設(shè)計(jì)
2022-12-01 05:27:46陳博翔李宇喆唐校宋躍
電子制作 2022年20期
關(guān)鍵詞:設(shè)計(jì)
陳博翔,李宇喆,唐校,宋躍
(東莞理工學(xué)院 電子工程與智能化學(xué)院,廣東東莞,523808)
1 無刷直流電機(jī)簡述
隨著電子技術(shù)及永磁材料的發(fā)展,無刷直流電機(jī)憑借自身電子換相的優(yōu)點(diǎn)避免了直流電機(jī)換相火花大,機(jī)械壽命短的缺點(diǎn),同時(shí)保留了直流電機(jī)良好的機(jī)械特性。對(duì)于無刷直流電機(jī)的控制,一般分為方波控制、直接轉(zhuǎn)矩控制和磁場定向控制。方波控制為比較傳統(tǒng)的控制方案,具有算法簡單,成本低等優(yōu)點(diǎn),但也存在著轉(zhuǎn)矩脈動(dòng)大、電機(jī)效率低、控制精度低以及電流噪聲大等缺點(diǎn),隨著處理器計(jì)算能力的增強(qiáng),磁場定向控制憑借優(yōu)越的控制性能和較高的效率,逐漸成為無刷直流電機(jī)控制的主流方案。圖1為無刷直流電機(jī)控制原理圖。
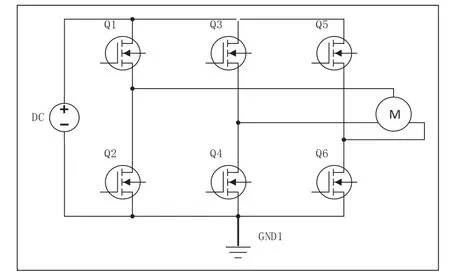
圖1 無刷直流電機(jī)控制原理圖
2 無刷直流電機(jī)的矢量控制
無刷直流電機(jī)的矢量控制又稱磁場定向控制(FOC)。矢量控制一般是通過ABC三相電流采樣,并經(jīng)過坐標(biāo)軸變換,即Clark變換、Park變換得到旋轉(zhuǎn)坐標(biāo)軸下q軸電流和d軸電流,而后計(jì)算誤差并通過PI控制器得到Ud和Uq,其中q軸電流的給定值由速度環(huán)路的輸出得到,為實(shí)現(xiàn)力矩最大化,一般將d軸電流的給定值設(shè)定為0,再經(jīng)過Park逆變換得到Uα和Uβ,最后通過調(diào)制輸入到三相逆變器,從而實(shí)現(xiàn)無刷直流電機(jī)的控制。調(diào)制方案一般有SPWM和SVPWM等算法,相較于SPWM,SVPWM有更高的直流側(cè)電壓利用率,能達(dá)到更高的效率,因而本次設(shè)計(jì)采用SVPWM為三相逆變調(diào)制算法。Park變換及Park逆變換中需得到電機(jī)的電氣角度,電氣角度的獲取是磁場定向控制的核心。圖2為電機(jī)速度閉環(huán)的矢量控制系統(tǒng)框圖。

圖2 電機(jī)速度閉環(huán)控制矢量控制系統(tǒng)框圖
3 滑模觀測器
滑模觀測器是一種非線性觀測器,魯棒性強(qiáng),對(duì)于參數(shù)和干擾的敏感度低,觀測器是由軟件實(shí)現(xiàn),不受外部物理環(huán)境影響。滑模觀測器的本質(zhì)是狀態(tài)重構(gòu),利用測量數(shù)據(jù)作為輸入,計(jì)算后使輸出值近似于系統(tǒng)的實(shí)際值。
在本文的控制策略中,通過觀測電流與反饋電流的誤差進(jìn)行設(shè)計(jì)滑模觀測器,并由誤差重構(gòu)反電動(dòng)勢,得到電機(jī)位置轉(zhuǎn)速信息。
3.1 滑模觀測器的設(shè)計(jì)
在靜止坐標(biāo)系下,基于無刷直流電機(jī)的數(shù)學(xué)模型,可以得到電機(jī)的電壓方程如下:


根據(jù)式(1)電壓方程,改寫可得電機(jī)電流的狀態(tài)方程為:

為了獲得Eα和Eβ的估計(jì)值,將滑模觀測器設(shè)計(jì)為以下形式:

由式(3)和式(4)可得電流的誤差方程。

傳統(tǒng)的滑模觀測器設(shè)計(jì)滑模控制律為:

3.2 滑模增益的確認(rèn)
式(6)中的k值為滑模增益,滑模增益k的值決定了觀測電流值能否收斂成實(shí)際電流值,以及收斂速度。工程上很多使用經(jīng)驗(yàn)試湊的方法來獲取滑模增益k,而經(jīng)驗(yàn)試湊法在不同模型下,需要有較長時(shí)間調(diào)試,且調(diào)試過程中,參數(shù)選定的不當(dāng)會(huì)對(duì)硬件系統(tǒng)造成損壞,故本文通過推導(dǎo)的方式來敲定滑模增益k。
對(duì)于:


由式(5)和式(6), 式(9)可以展開為:




將式(12)和式(13)結(jié)合,可以得到:

如果k值滿足式(14)所需條件,α軸上的觀測電流就能收斂為實(shí)際電流值,并且一直保持在滑模面上。
對(duì)于β軸上的h值推導(dǎo),與α軸上一樣,在此處便不再贅述,直接給出:

3.3 轉(zhuǎn)子位置的提取
由式(6)和式(7)可知,控制量和得到的反電動(dòng)勢是一個(gè)高頻切換信號(hào),對(duì)于轉(zhuǎn)子電角度的提取,需要一個(gè)連續(xù)的反電動(dòng)勢估計(jì)值,故需要對(duì)所得到的拓展反電動(dòng)勢進(jìn)行低通濾波。
當(dāng)進(jìn)行濾波處理時(shí),拓展反電動(dòng)勢的估計(jì)將會(huì)有相位上的誤差,這個(gè)誤差會(huì)對(duì)轉(zhuǎn)子位置的估算準(zhǔn)確性有一定的影響,故在實(shí)際生產(chǎn)設(shè)計(jì)中,需要對(duì)濾波造成的相位位移進(jìn)行角度補(bǔ)償。
Eα和Eβ是在相位上相差九十度的正弦信號(hào),故可以通過反正切的方法獲得轉(zhuǎn)子位置:

進(jìn)行角度補(bǔ)償,可得:

對(duì)于電機(jī)的控制,速度控制才是最終目的。而轉(zhuǎn)速信息可以通過對(duì)式(17)進(jìn)行微分運(yùn)算得到。
4 控制系統(tǒng)的整體設(shè)計(jì)
本次系統(tǒng)設(shè)計(jì)基于Matlab/Simulink仿真。Simulink能對(duì)電機(jī)模型控制系統(tǒng)進(jìn)行仿真,結(jié)果貼切實(shí)際,可以為理論知識(shí)驗(yàn)證現(xiàn)實(shí)的可行性。
磁場定向控制(矢量控制)是無刷直流電機(jī)控制系統(tǒng)的核心算法,在系統(tǒng)設(shè)計(jì)的過程中,先通過模型的真實(shí)位置及轉(zhuǎn)速信息完成磁場定向控制,完成電流環(huán)路以及速度環(huán)路的穩(wěn)定控制。在速度環(huán)中,電機(jī)速度的給定值為500r/min,速度環(huán)的輸出值作為Q軸電流的給定值,因?yàn)镈軸電流方向與電機(jī)磁極方向相同,為了提高控制效率,實(shí)現(xiàn)力矩最大化,D軸電流的給定值設(shè)置為0。
完成基于電機(jī)真實(shí)位置及轉(zhuǎn)速信息下的無刷直流電機(jī)的電流環(huán)路及速度環(huán)路控制后,引入滑模觀測器,并調(diào)試得到電機(jī)估計(jì)轉(zhuǎn)子位置及轉(zhuǎn)速信息,將滑模觀測器的觀測值引入環(huán)路,取代電機(jī)真實(shí)位置及轉(zhuǎn)速信息,完成無刷直流電機(jī)在無位置傳感器下的控制系統(tǒng)。
在本次設(shè)計(jì)中,電機(jī)的定子電阻設(shè)為2.8Ω,電機(jī)類型選定為表貼式電機(jī),即Q軸電感和D軸電感一樣,為8.5e-3H,永磁體的磁鏈為0.17Wb,電機(jī)的轉(zhuǎn)動(dòng)慣量為0.001 kg·m2,極對(duì)數(shù)為4。直流側(cè)電壓設(shè)定為311V,三相逆變電路選定IGBT作為開關(guān)管,其導(dǎo)通阻抗為1e-3Ω。速度環(huán)路的輸出限幅為-20A~20A,Q軸的電流環(huán)路輸出和D軸的電流環(huán)路輸出限幅一致,均為350V。系統(tǒng)的開關(guān)頻率為10kHz,電流的采樣頻率也為10kHz,實(shí)驗(yàn)的仿真時(shí)長為0.05s。
為了展示滑模觀測器的可靠性,在系統(tǒng)中引入電機(jī)真實(shí)轉(zhuǎn)子位置信息與滑模觀測器的觀測位置信息進(jìn)行對(duì)比。
5 結(jié)果分析與結(jié)論
5.1 實(shí)驗(yàn)結(jié)果分析
圖3為仿真模型觀測到的電機(jī)速度波形,圖4為電機(jī)估計(jì)轉(zhuǎn)子位置與實(shí)際轉(zhuǎn)子位置波形圖,圖5為仿真模型控制框圖。
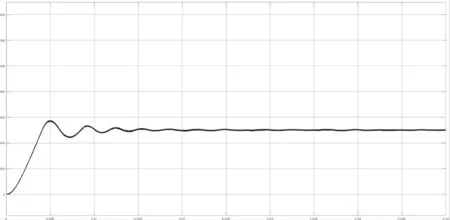
圖3 電機(jī)速度
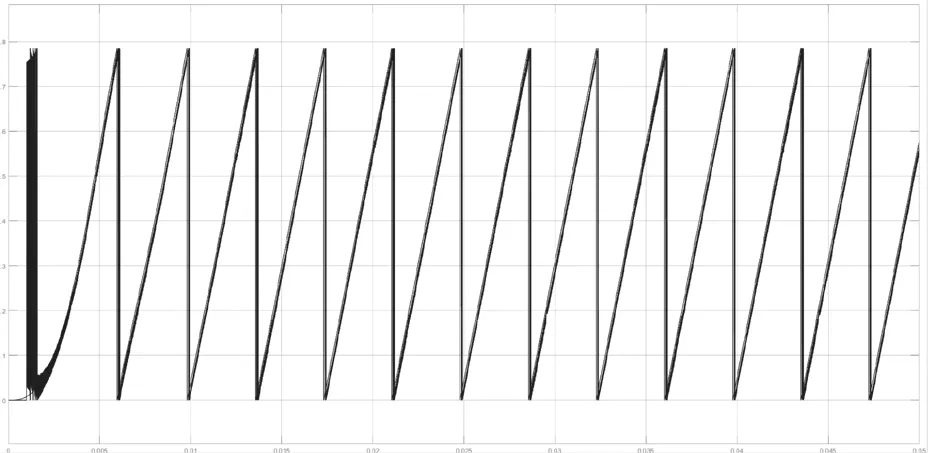
圖4 估計(jì)轉(zhuǎn)子位置與實(shí)際轉(zhuǎn)子位置

圖5 仿真模型控制框圖
觀察圖3可以發(fā)現(xiàn)電機(jī)在較短的時(shí)間內(nèi)速度就收斂到了設(shè)定值,觀察圖4可知估計(jì)轉(zhuǎn)子位置可以很好地跟上實(shí)際轉(zhuǎn)子位置,具有較小的誤差。實(shí)驗(yàn)結(jié)果表明,通過滑模觀測器和反正切的方式,能夠很好地提取電機(jī)的轉(zhuǎn)子位置及轉(zhuǎn)速信息,并對(duì)電機(jī)進(jìn)行控制。
5.2 結(jié)論
本課題是基于Matlab/Simulink平臺(tái)構(gòu)建了滑模觀測器與反正切下無刷直流電機(jī)控制系統(tǒng)。分析了滑模觀測器的特點(diǎn)、控制律設(shè)計(jì)、滑模增益的確立及配合反正切的應(yīng)用。實(shí)驗(yàn)結(jié)果表明滑模觀測器能很好地響應(yīng)跟蹤上轉(zhuǎn)子位置及轉(zhuǎn)速信息,電機(jī)轉(zhuǎn)速能很快收斂到設(shè)定值,證實(shí)了策略的可行性,實(shí)現(xiàn)無刷直流電機(jī)的無位置傳感器控制,為之后的實(shí)物實(shí)驗(yàn)驗(yàn)證了理論的可行性。
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04