基于線性自抗擾控制的激光通信跟瞄機(jī)構(gòu)機(jī)電聯(lián)合仿真
2022-11-30 10:10:58王文淵白楊楊張立中孟立新王勁凱范濤張暾張凱強(qiáng)
機(jī)床與液壓 2022年22期
王文淵,白楊楊,張立中,孟立新,王勁凱,范濤,張暾,張凱強(qiáng)
(1.長春理工大學(xué)機(jī)電工程學(xué)院,吉林長春 130022;2.長春理工大學(xué)空地激光通信國防重點(diǎn)實(shí)驗(yàn)室,吉林長春 130022)
0 前言
激光通信具有傳輸效率高、抗擾能力強(qiáng)、能耗低、保密性強(qiáng)等優(yōu)勢,已成為各國競相研究的熱點(diǎn)[1]。空間激光通信組網(wǎng)將通信形式由點(diǎn)對點(diǎn)擴(kuò)展為一對多或多對多,提高了星間通信的容量與穩(wěn)定性,進(jìn)一步擴(kuò)大了激光通信的穩(wěn)定、高效等優(yōu)勢,具有重要的研究價(jià)值[2]。激光通信跟瞄系統(tǒng)是建立和維持空間激光通信組網(wǎng)鏈路的重要環(huán)節(jié),其跟蹤精度與響應(yīng)速度對空間光通信系統(tǒng)的性能影響重大[3-4],因此對跟瞄機(jī)構(gòu)的結(jié)構(gòu)與控制系統(tǒng)的設(shè)計(jì)也尤為重要。影響跟瞄機(jī)構(gòu)跟蹤精度的因素主要包括機(jī)械結(jié)構(gòu)、摩擦及振動(dòng)等擾動(dòng),測量反饋環(huán)節(jié)的誤差,系統(tǒng)噪聲等。為提高跟蹤精度、增強(qiáng)激光通信鏈路的穩(wěn)定性,國內(nèi)外學(xué)者針對光通信跟瞄機(jī)構(gòu)已開展大量研究。文獻(xiàn)[5]設(shè)計(jì)了一種兩軸四框架的穩(wěn)瞄吊艙,能夠有效抑制高頻振動(dòng)。文獻(xiàn)[6]提出了一種二維光電轉(zhuǎn)臺(tái),可在環(huán)境較為惡劣的近地空間穩(wěn)定運(yùn)行。文獻(xiàn)[7]對單軸轉(zhuǎn)臺(tái)的關(guān)鍵構(gòu)件的性能進(jìn)行了有限元分析。文獻(xiàn)[8]提出了一種抗摩擦擾動(dòng)的自適應(yīng)控制系統(tǒng)。文獻(xiàn)[9]提出了一種基于模糊PID算法的控制系統(tǒng),可實(shí)現(xiàn)角位移誤差低于0.003°。但現(xiàn)有的研究工作大都是將機(jī)械系統(tǒng)的設(shè)計(jì)與控制系統(tǒng)的設(shè)計(jì)作為相互獨(dú)立的進(jìn)程分開進(jìn)行的,每當(dāng)調(diào)試中遇到問題,雙方就必須回到自己的進(jìn)程中各自整改并重新整合,使得研發(fā)效率大幅降低。因此,本文作者將線性自抗擾控制技術(shù)與基于ADAMS和Simulink的機(jī)電聯(lián)合虛擬樣機(jī)技術(shù)引入激光通信跟瞄機(jī)構(gòu)的研究,將機(jī)械與控制兩個(gè)系統(tǒng)整合進(jìn)同一個(gè)模型,進(jìn)行聯(lián)合仿真與調(diào)試,充分發(fā)揮ADAMS多體動(dòng)力學(xué)分析與Simulink圖形化控制系統(tǒng)仿真的優(yōu)勢,獲得能夠更加真實(shí)、全面地反映跟瞄機(jī)構(gòu)特性的虛擬樣機(jī)模型[10]。
本文作者基于空間激光通信組網(wǎng)系統(tǒng),建立從光端機(jī)跟瞄機(jī)構(gòu)機(jī)電聯(lián)合虛擬樣機(jī);針對機(jī)構(gòu)低速運(yùn)行時(shí)的摩擦擾動(dòng),設(shè)計(jì)基于線性自抗擾控制(Linear Active Disturbance Rejection Control,LADRC)的聯(lián)合仿真控制系統(tǒng),對跟瞄機(jī)構(gòu)的跟蹤性能進(jìn)行仿真分析,為跟瞄系統(tǒng)的設(shè)計(jì)與控制問題提供參考。
1 跟瞄機(jī)構(gòu)基本原理與機(jī)械系統(tǒng)建模
空間激光通信組網(wǎng)由1個(gè)主光端機(jī)和4個(gè)從光端機(jī)構(gòu)成,主光端機(jī)包含4組天線,分別與4個(gè)從光端機(jī)對接,進(jìn)行光束的收發(fā),實(shí)現(xiàn)一對四組網(wǎng)通信[2]。主光端機(jī)的信標(biāo)光發(fā)出后,首先經(jīng)由跟瞄機(jī)構(gòu)折返傳遞至振鏡,再經(jīng)過其他光學(xué)元件傳遞至CCD相機(jī),完成信號的采集;然后,由圖像處理單元讀取脫靶量并傳遞給控制器;最后,由控制器生成控制信號施加于跟瞄機(jī)構(gòu),形成粗跟蹤閉環(huán)控制。從光端機(jī)粗跟蹤系統(tǒng)結(jié)構(gòu)如圖1所示。

圖1 從光端機(jī)粗跟蹤系統(tǒng)結(jié)構(gòu)
跟瞄機(jī)構(gòu)為一個(gè)單反鏡式二維轉(zhuǎn)臺(tái),其機(jī)械系統(tǒng)主要包含俯仰軸系和方位軸系兩大部分,通過調(diào)整兩個(gè)軸系控制反射鏡的位置,實(shí)現(xiàn)信標(biāo)光的捕獲與跟蹤。兩軸系均采用力矩電機(jī)直接驅(qū)動(dòng)。文中使用SolidWorks建立跟瞄機(jī)構(gòu)的實(shí)體模型,如圖2所示。

圖2 跟瞄機(jī)構(gòu)三維模型
完成機(jī)械系統(tǒng)的實(shí)體建模后,還需對它進(jìn)行簡化處理,將俯仰、方位軸系中固連在一起不發(fā)生相對運(yùn)動(dòng)的零件合并,將基座等不影響仿真進(jìn)程與結(jié)果的零件適當(dāng)變形或省略,以便于ADAMS中約束與力的施加與解算,簡化動(dòng)力學(xué)建模與仿真。為保證仿真的真實(shí)性,簡化處理后的模型必須保證質(zhì)量、重心位置、轉(zhuǎn)動(dòng)慣量等參數(shù)與原模型保持一致,可通過定義材料、增減部分實(shí)體以及在ADAMS中直接編輯對應(yīng)構(gòu)件的力學(xué)參數(shù)等方式對上述參數(shù)進(jìn)行調(diào)整。經(jīng)過簡化,跟瞄機(jī)構(gòu)的三維實(shí)體共合并為7個(gè)構(gòu)件,如表1所示。
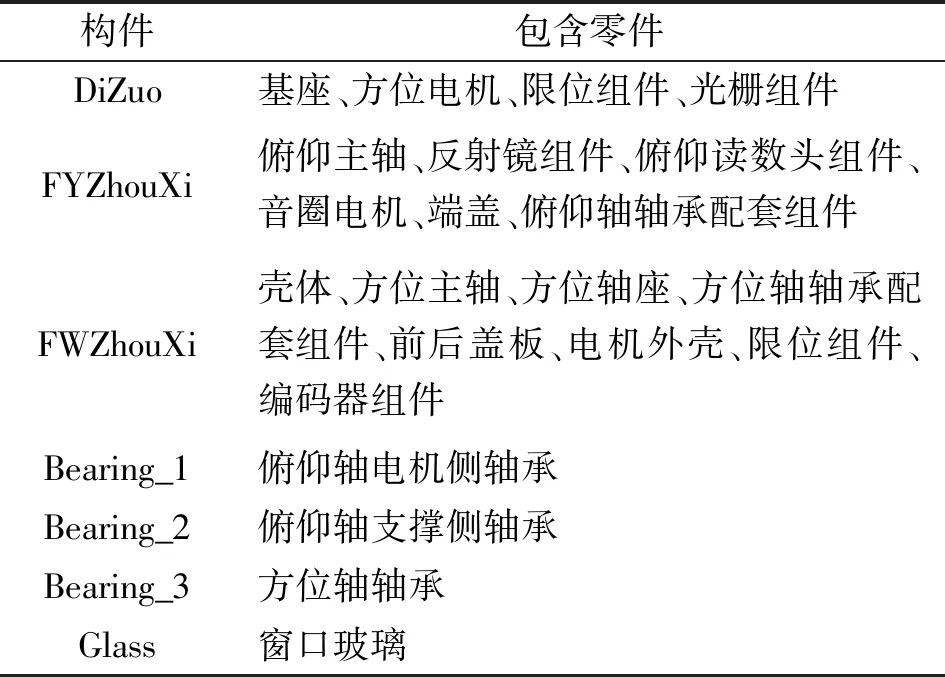
表1 合并簡化結(jié)構(gòu)件定義
簡化處理完畢后,將三維實(shí)體模型導(dǎo)入ADAMS。在ADAMS中需按照實(shí)際情況設(shè)定構(gòu)件的材料、密度等參數(shù),然后添加重力,并對各構(gòu)件施加約束與力、設(shè)置摩擦參數(shù),模型中的構(gòu)件均視為剛體,運(yùn)動(dòng)副與接觸力如表2所示。設(shè)置完成的機(jī)械系統(tǒng)模型如圖3所示。在ADAMS/View中,當(dāng)相對運(yùn)動(dòng)速度低于黏滯轉(zhuǎn)變速度時(shí),系統(tǒng)認(rèn)為接觸面處于靜摩擦狀態(tài),使用運(yùn)動(dòng)副的蠕變、速度和靜態(tài)摩擦因數(shù)計(jì)算有效摩擦因數(shù)。當(dāng)相對運(yùn)動(dòng)速度為黏滯轉(zhuǎn)變速度的1~1.5倍時(shí),認(rèn)為接觸面正在靜態(tài)摩擦和動(dòng)態(tài)摩擦之間過渡,使用階躍函數(shù)進(jìn)行動(dòng)態(tài)和靜態(tài)摩擦因數(shù)之間的轉(zhuǎn)換。當(dāng)相對運(yùn)動(dòng)速度超過黏滯轉(zhuǎn)變速度的1.5倍,則認(rèn)為關(guān)節(jié)處于動(dòng)態(tài)摩擦中,使用動(dòng)態(tài)摩擦因數(shù)進(jìn)行摩擦力的計(jì)算。此虛擬樣機(jī)中共存在3處摩擦,即3個(gè)軸承內(nèi)部的摩擦力,屬于潤滑鋼和潤滑鋼之間的摩擦,在ADAMS模型中將其阻尼系數(shù)配置為0.16[10]。

表2 ADAMS虛擬樣機(jī)運(yùn)動(dòng)副與力

圖3 跟瞄機(jī)構(gòu)ADAMS虛擬樣機(jī)
2 基于LADRC的控制系統(tǒng)設(shè)計(jì)與建模
2.1 電機(jī)模型
跟瞄機(jī)構(gòu)包含俯仰、方位兩個(gè)軸系,兩軸系具有相同的控制策略,文中以俯仰軸為例進(jìn)行分析。俯仰軸采用旋轉(zhuǎn)式音圈電機(jī)進(jìn)行驅(qū)動(dòng)。音圈電機(jī)具有靈敏度高、響應(yīng)快、直驅(qū)無遲滯等優(yōu)點(diǎn)[11-12],非常適用于精密定位伺服系統(tǒng),在工業(yè)上已取得廣泛應(yīng)用[13-14]。音圈電機(jī)的電壓動(dòng)態(tài)平衡方程[15]為
(1)
其中:ua為電樞電壓;ia為電樞電流;Ra為電樞電阻;La為電樞電感;ea為反電勢。

線圈所受電磁力F=ktia,動(dòng)子在運(yùn)動(dòng)時(shí)需克服動(dòng)摩擦力Fc=kv以及慣性力Fm=Ja=Jdv/dt,由受力平衡可得:
(2)
聯(lián)立上述等式,整理可得電樞電壓-位移傳遞函數(shù)G(s)為
(3)
由此即可建立電機(jī)模型如圖4所示。
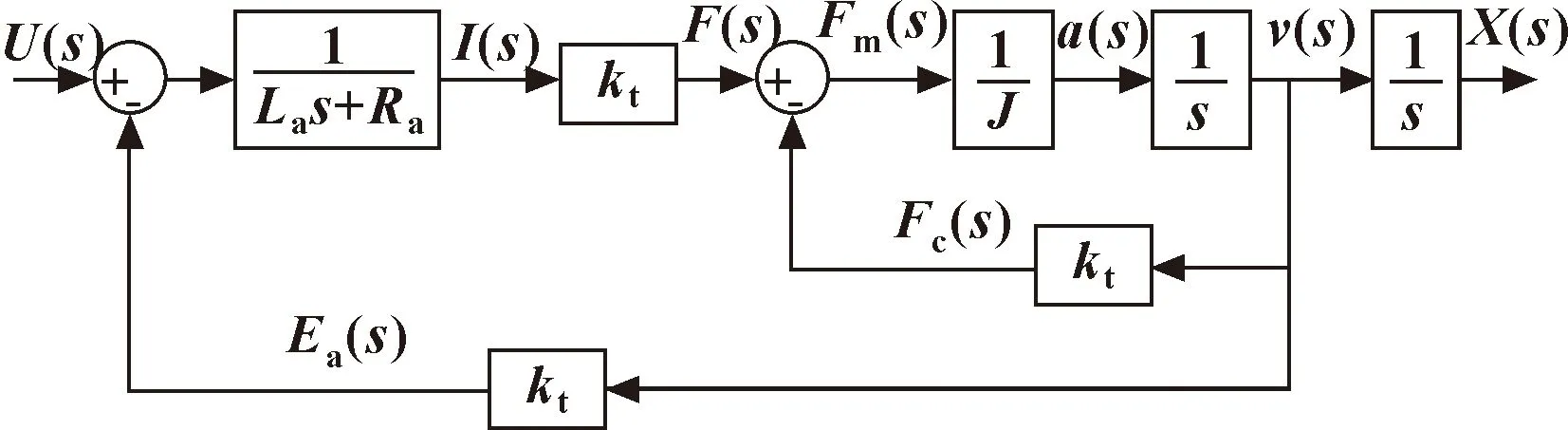
圖4 音圈電機(jī)模型
采用機(jī)電聯(lián)合仿真的方式進(jìn)行研究,機(jī)械系統(tǒng)的運(yùn)動(dòng)學(xué)和動(dòng)力學(xué)解算方程包含在作為負(fù)載的ADAMS子系統(tǒng)ADAMS_sub內(nèi),故控制系統(tǒng)中需建立電樞電壓到扭矩的傳遞函數(shù),而扭矩到角速度的傳遞關(guān)系解算由ADAMS_sub完成。控制系統(tǒng)以目標(biāo)角位移為輸入量、扭矩為輸出量,機(jī)械系統(tǒng)以扭矩為輸入量、俯仰軸與方位軸的角位移為輸出量并反饋給控制系統(tǒng),形成閉環(huán)。通過音圈電機(jī)的數(shù)學(xué)模型整理得電樞電壓-力的傳遞函數(shù)H(s),模型降為2階系統(tǒng)。線圈組件旋轉(zhuǎn)的力臂為r。
(4)
2.2 摩擦模型
跟瞄機(jī)構(gòu)低速運(yùn)行過程中容易產(chǎn)生爬行、震顫等現(xiàn)象,降低系統(tǒng)的跟蹤性能[16]。該現(xiàn)象的形成主要源自于系統(tǒng)低速運(yùn)行時(shí)的摩擦擾動(dòng)[16]。為降低摩擦擾動(dòng)造成的不利影響,國內(nèi)外學(xué)者提出了多種摩擦模型。庫侖及黏滯模型是典型的靜態(tài)摩擦模型,結(jié)構(gòu)簡單易用,但無法描述摩擦過程中的動(dòng)態(tài)特性;Lugre模型對動(dòng)態(tài)、靜態(tài)摩擦特性都可以準(zhǔn)確描述[17],但參數(shù)辨識(shí)困難。Stribeck模型對摩擦過程的描述相對準(zhǔn)確且全面,同時(shí)結(jié)構(gòu)相對簡單[18-19],故采用Stribeck模型對跟瞄系統(tǒng)的摩擦進(jìn)行建模分析。Stribeck模型[20]可表示為
Ff(v)=[Fc+(Fs-Fc)e-(v/vs)2]sgn(v)+Bθv
(5)
其中:Fc為庫侖摩擦力矩,N·m;Fs為最大靜摩擦力矩,N·m;v為速度,rad/s;vs為Stribeck速度,rad/s;Bθ為黏性摩擦因數(shù),N·m·s/rad。
Stribeck模型的參數(shù)可由文獻(xiàn)[18]所提供的辨識(shí)方法獲取,具體取值為Fc=0.184 N·m、Fs=0.206 N·m、Bθ=4.97×10-3N·m·s/rad。vs為經(jīng)驗(yàn)參數(shù),通常取0.5~2 rad/s,文中取vs=0.6 rad/s,搭建Stribeck模型,如圖5所示。

圖5 Stribeck摩擦模型
2.3 線性自抗擾控制器設(shè)計(jì)
自抗擾控制的控制效果好、魯棒性強(qiáng),在工程上已得到廣泛應(yīng)用。線性自抗擾控制以適當(dāng)犧牲性能為代價(jià),將擴(kuò)張狀態(tài)觀測器(Extended State Observer,ESO)進(jìn)行了線性化,大幅減少了待整定參數(shù)的數(shù)量,降低了參數(shù)整定的難度,簡化了控制器的設(shè)計(jì)流程。線性自抗擾控制將一切對系統(tǒng)造成影響的外部因素統(tǒng)一視作擾動(dòng),由線性擴(kuò)張狀態(tài)觀測器(Linear Extended State Observer,LESO)獲得系統(tǒng)所受的總擾動(dòng)的實(shí)時(shí)估計(jì)值,進(jìn)而對它進(jìn)行補(bǔ)償,將復(fù)雜系統(tǒng)簡化為積分串聯(lián)型,然后進(jìn)行反饋,完成閉環(huán)控制。由于任何系統(tǒng)都可以被線性自抗擾控制器簡化為積分串聯(lián)型系統(tǒng),故自抗擾控制不依賴被控對象的精確模型,對建模困難且抗擾因素復(fù)雜的系統(tǒng)控制效果優(yōu)異[21]。設(shè)二階系統(tǒng)微分方程為
(6)
移項(xiàng)變形得:
(7)
按照自抗擾控制的思想,將
(8)

圖6 二階線性自抗擾控制器原理
列出二階系統(tǒng)的狀態(tài)空間方程為
(9)
整理得:

(10)
其中:
對應(yīng)的LESO為

(11)

在Simulink中搭建LESO如圖7所示。

圖7 LESO結(jié)構(gòu)
3 聯(lián)合仿真
聯(lián)合仿真虛擬樣機(jī)由ADAMS模塊生成機(jī)械系統(tǒng)動(dòng)力學(xué)、運(yùn)動(dòng)學(xué)解算方程,Simulink生成控制系統(tǒng)解算方程,二者經(jīng)由接口ADAMS/Control互通,以Simulink控制系統(tǒng)的輸出信號作為ADAMS模塊的控制信號,以ADAMS模塊輸出的位移信號、速度信號作為Simulink控制系統(tǒng)的反饋信號,實(shí)現(xiàn)聯(lián)合仿真。
跟瞄機(jī)構(gòu)機(jī)械系統(tǒng)共包含2個(gè)輸入量和4個(gè)輸出量,輸入量為俯仰軸力矩、方位軸力矩,輸出量為俯仰軸角速度、俯仰軸角位移、方位軸角速度、方位軸角位移。在ADAMS/Control中確定輸入量與輸出量,選擇對接的軟件為MATLAB。設(shè)置完畢后將機(jī)械系統(tǒng)配置為子系統(tǒng)ADAMS_sub,然后將它導(dǎo)入至Simulink中,搭建激光通信跟瞄機(jī)構(gòu)俯仰軸與方位軸的機(jī)電聯(lián)合虛擬樣機(jī)。
聯(lián)合仿真虛擬樣機(jī)主要包括俯仰軸控制模塊、方位軸控制模塊、作為負(fù)載的ADAMS_sub模塊。文中所研究的跟瞄機(jī)構(gòu)俯仰軸和方位軸的控制策略相同,故以俯仰軸為例進(jìn)行控制系統(tǒng)的設(shè)計(jì)、分析與仿真。
按照表3填入俯仰軸控制系統(tǒng)基本參數(shù),并配置Simulink中的ADAMS_sub模塊:將Animation mode設(shè)置為交互,Simulation mode選擇離散,Communication interval設(shè)置為0.001 s。

表3 俯仰軸控制系統(tǒng)模型參數(shù)
為驗(yàn)證摩擦擾動(dòng)對系統(tǒng)跟蹤性能的影響,搭建基于PID控制的聯(lián)合仿真控制系統(tǒng)。系統(tǒng)采用位置、速度雙閉環(huán)結(jié)構(gòu),如圖8所示。由于文中主要針對位置環(huán)線性自抗擾控制開展研究,故在此不再對速度環(huán)進(jìn)行詳細(xì)闡述。圖9所示為系統(tǒng)對f=0.1 Hz、幅值為5的正弦信號的跟蹤曲線。可見:每當(dāng)速度經(jīng)過零點(diǎn)時(shí)跟蹤信號都會(huì)發(fā)生畸變,產(chǎn)生一段速度為0的跟蹤死區(qū),造成轉(zhuǎn)臺(tái)低速運(yùn)行時(shí)的爬行現(xiàn)象,降低跟瞄機(jī)構(gòu)的跟蹤精度。
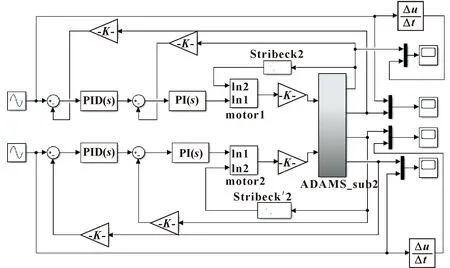
圖8 基于PID控制的聯(lián)合仿真控制系統(tǒng)
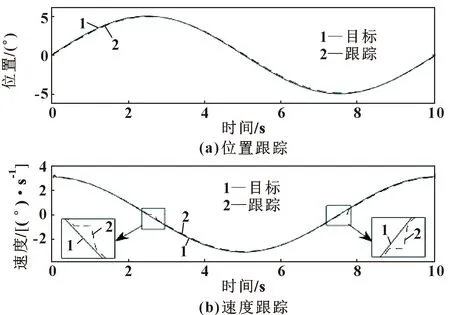
圖9 PID控制系統(tǒng)跟蹤曲線
摩擦是一種十分復(fù)雜且非線性的物理現(xiàn)象,不僅與接觸面的相對運(yùn)動(dòng)速度相關(guān),還存在著摩擦記憶等不易用模型描述的現(xiàn)象。為改善系統(tǒng)低速運(yùn)行時(shí)的跟蹤性能,搭建基于線性自抗擾控制的聯(lián)合仿真控制系統(tǒng),如圖10所示。

圖10 基于線性自抗擾控制的跟瞄機(jī)構(gòu)聯(lián)合仿真控制系統(tǒng)
首先考察系統(tǒng)對階躍信號的響應(yīng),如圖11所示。可知:系統(tǒng)超調(diào)量為9%,調(diào)節(jié)時(shí)間為0.2 s,峰值時(shí)間為0.03 s,滿足控制系統(tǒng)要求。
向系統(tǒng)輸入正弦信號,考察其跟蹤性能。對虛擬樣機(jī)控制系統(tǒng)分別輸入頻率f為1、0.5、0.1 Hz的正弦信號,跟蹤曲線如圖12—圖14所示。可知:采用線性自抗擾控制系統(tǒng)的速度跟蹤信號基本消除了死區(qū),有效抑制了伺服轉(zhuǎn)臺(tái)的低速爬行現(xiàn)象;聯(lián)合仿真系統(tǒng)對正弦信號的跟蹤誤差在調(diào)節(jié)時(shí)間內(nèi)出現(xiàn)了一個(gè)波動(dòng),隨后趨于平滑,并維持在一個(gè)穩(wěn)定的范圍內(nèi);當(dāng)輸入f=1 Hz的目標(biāo)信號時(shí),系統(tǒng)穩(wěn)定后的誤差最大值約為0.1°;f=0.5 Hz時(shí),誤差最大值約為0.03°;f=0.1 Hz時(shí),誤差最大值約為0.006°。由此可以推斷,誤差隨著頻率的降低呈下降趨勢。因此,當(dāng)跟蹤目標(biāo)為低頻曲線時(shí),該控制系統(tǒng)可以實(shí)現(xiàn)較高的跟蹤精度。
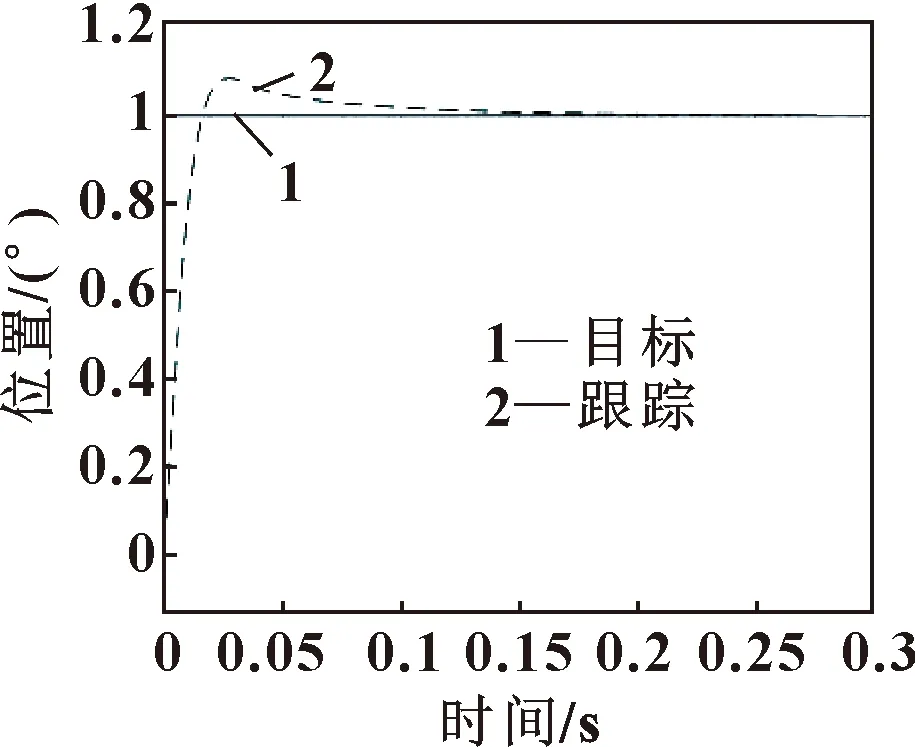
圖11 階躍信號跟蹤結(jié)果

圖12 f=1 Hz的正弦信號跟蹤結(jié)果

圖13 f=0.5 Hz的正弦信號跟蹤結(jié)果

圖14 f=0.1 Hz的正弦信號跟蹤結(jié)果
空間激光通信組網(wǎng)應(yīng)用場合為星間通信,對應(yīng)的跟瞄機(jī)構(gòu)的工作特點(diǎn)為運(yùn)動(dòng)速度低、跟蹤精度需求高,因此基于LADRC的控制系統(tǒng)可以實(shí)現(xiàn)對光斑信號的高精度跟蹤。聯(lián)合仿真系統(tǒng)針對頻率為0.1 Hz的信號,穩(wěn)定后的跟蹤誤差最大值為0.006°,即105 μrad,符合跟瞄機(jī)構(gòu)的指標(biāo)要求。
4 結(jié)論
本文作者使用ADAMS與Simulink建立了空間激光通信組網(wǎng)跟瞄機(jī)構(gòu)的機(jī)電聯(lián)合虛擬樣機(jī),完成了基于PID控制和LADRC的機(jī)電聯(lián)合仿真分析,驗(yàn)證了由摩擦擾動(dòng)造成的低速爬行現(xiàn)象,考察了聯(lián)合仿真虛擬樣機(jī)對不同信號的跟蹤性能。結(jié)果表明:基于LADRC的機(jī)電聯(lián)合仿真控制系統(tǒng)跟蹤精度優(yōu)于PID控制,對摩擦擾動(dòng)具有良好的抑制效果,對頻率為0.1 Hz的正弦信號跟蹤誤差最大值為105 μrad,符合跟瞄機(jī)構(gòu)的指標(biāo)要求,說明了機(jī)電聯(lián)合虛擬樣機(jī)設(shè)計(jì)合理。
聯(lián)合仿真避免了機(jī)械系統(tǒng)解算方程的推導(dǎo),不僅降低了工作量,還可以獲得與實(shí)際的物理模型更為接近的虛擬樣機(jī),使得聯(lián)合仿真較傳統(tǒng)方法具有更高的效率與真實(shí)度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45