流量反饋型電液比例閥的模糊PID控制特性
2022-11-30 10:10:36丁兆驛趙斌張曉剛郝云曉劉赫
機床與液壓 2022年22期
關鍵詞:信號
丁兆驛,趙斌,張曉剛,郝云曉,劉赫
(太原理工大學新型傳感器與智能控制教育部重點實驗室,山西太原 030024)
0 前言
電液比例閥作為液壓系統核心元件,能通過改變閥芯位移來連續調節流量,應用于許多機械裝備領域。在電液比例閥中,基于位移-流量反饋原理的比例閥具有結構簡單、綜合性能好的特點[1]。根據流量反饋原理,王松峰等[2]提出一種新型三位四通電液比例閥。這種新型電液比例閥是一種較為復雜的高階非線性系統,傳統的PID控制方案對于非線性系統的控制特性較差[3]。如何改進電液比例閥控制算法,提高電液比例閥的特性,是目前電液比例閥的研究熱點和前沿[4]。
針對傳統PID算法的智能化改進,目前國內外相關學者已經提出了許多方案[5-6]。其中,基于模糊控制理論的PID改進方案,具有穩定性好且適用于非線性對象的特點[7],被廣泛應用于實現各種功能[8-12],可用于比例閥控制系統。
針對一些非線性應用對象,LUO等[13]采用前饋fuzzy-PID來處理非線性的微生物燃料電池系統;ZHU等[14]提出了一種基于非線性動態分析的模糊PID控制方法;彭輝等人[15]采用雙模糊算法來補償液壓系統的非對稱控制缺陷;MITRA等[16]調整了模糊PID設定值的加權系數。模糊PID控制也被廣泛應用于液壓閥領域[17-21]。
對此,本文作者采用KAZEMIAN[22]提出的模糊自整定PID參數控制方案,針對該新型電液比例閥設計一套模糊PID控制算法,基于Simulink和SimulationX軟件進行聯合仿真,驗證該算法相比于常規PID控制算法,其穩定性與響應速度均有明顯的提升。
1 新型電液比例閥工作原理與控制方案
1.1 工作原理
圖1所示為基于位移-流量反饋原理的電液比例閥的結構示意圖。
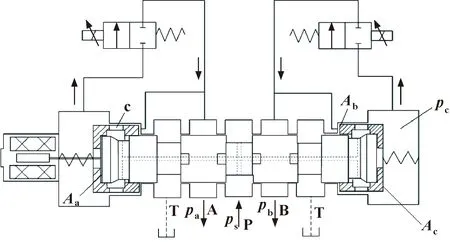
圖1 電液比例閥結構示意
電液比例閥先導級由兩個二位二通比例閥構成,通過控制先導閥閥芯位移,實現對主閥閥芯位移的控制。與傳統三位四通比例閥相比,該閥在主閥閥芯兩端增設了帶有反饋節流槽c的動閥套。主閥閥芯內部設置有引流油孔,將進油口P的高壓油經兩端反饋節流槽,分別引入閥芯兩端的控制腔。
當兩個先導閥均處于關閉狀態時,由于動閥套與閥體之間存在一定的預開量,閥芯兩端控制腔壓力與進油口P壓力相等,動閥套在控制腔壓力作用下,使主閥閥芯處于中位。當左先導閥開啟、右先導閥關閉時,左控制容腔液壓油流動,使左側控制容腔壓力降低,低于右側控制容腔壓力,壓力差推動閥芯與左側閥套向左移動,右側閥套受閥體階梯限位停止運動。當通過節流槽的流量與經過先導閥的流量相同時,主閥閥芯停止運動,穩定在某一位置,主閥口開口面積也保持不變,從而實現對油液流動方向和流量的控制。當右先導閥開啟、左先導閥關閉時,電液比例閥工作原理與上述過程相同,在此不再累贅。
1.2 控制方案
在圖1所示的電液比例閥中,反饋節流口的流量qc的公式為
(1)
式中:Cdc為主閥流量系數;Wc為節流槽面積增益;x為主閥閥芯位移;xi為節流槽預開口量;ρ為液壓油密度;ps為供油壓力;pc為控制容腔壓力。
先導閥流量qy公式為
(2)
式中:Cdy為先導閥流量系數;Wy為先導閥閥芯面積增益;y為先導閥閥芯位移;pb為B口壓力。
控制腔的流量連續性方程為
(3)
式中:Ac為閥套端面面積;Cc為液容。
當通過反饋節流槽的流量與先導閥流量相同時,先導閥閥芯位移與主閥閥芯位移關系為
(4)
式中:Cdc為液容;Aa為主閥閥芯端面面積;Ab為閥套環形端面積。
主閥流量qx公式為
(5)
式中:Cdx為主閥流量系數;Wx為主閥閥芯面積增益。
電液比例閥流量qv公式為
(6)
通過上述分析可知,電液比例閥主閥閥芯位移、流量與先導閥閥芯位移、流量成一定比例關系。通過調節先導閥閥芯位移,便可近似成比例地調節主閥閥芯位移。根據電液比例閥運行原理,提出如圖2所示的基于位移-流量反饋原理的電液比例閥控制框圖。
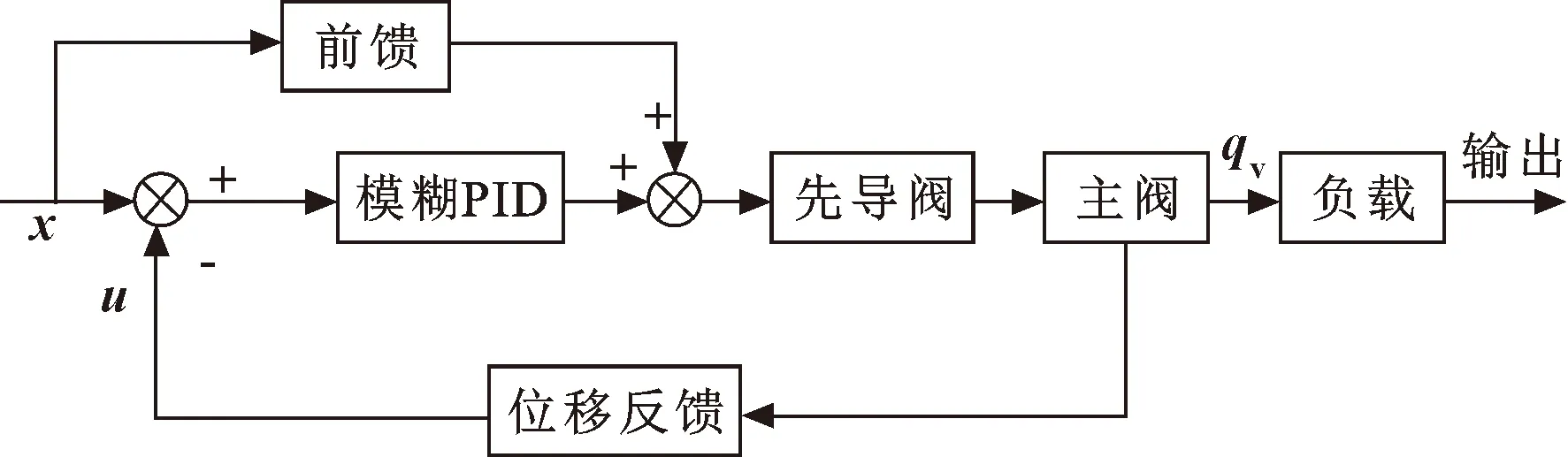
圖2 電液比例閥控制框圖
在提出的控制方案中,根據主閥閥芯位移與先導閥閥芯位移比例關系,主閥閥芯位移控制信號通過比例換算,得到相應的先導閥閥芯位移控制信號,通過前饋方式,開環控制先導閥閥芯位移,使主閥閥芯位移基本達到設定的主閥閥芯位移。同時,采用模糊PID控制器,根據主閥閥芯位移反饋信號與控制信號之差,產生閉環調節信號,補償前饋控制信號,實現主閥閥芯位移閉環穩定調控,改善電液比例閥的控制性能。
2 模糊自整定PID設計
根據PID工作原理與改進需求,設計一種兩輸入三輸出的基于模糊控制原理自整定PID控制器,其原理如圖3所示。該模糊PID控制器根據輸入的誤差值e和誤差值變化率ec這兩個輸入量,經過模糊化處理,通過模糊規則表得出對應的輸出量比例因數變化量ΔKp、積分因數變化量ΔKi和微分因數變化量ΔKd,使PID 3個參數可根據電液比例閥狀態變化不斷進行自我調整,改善控制效果。
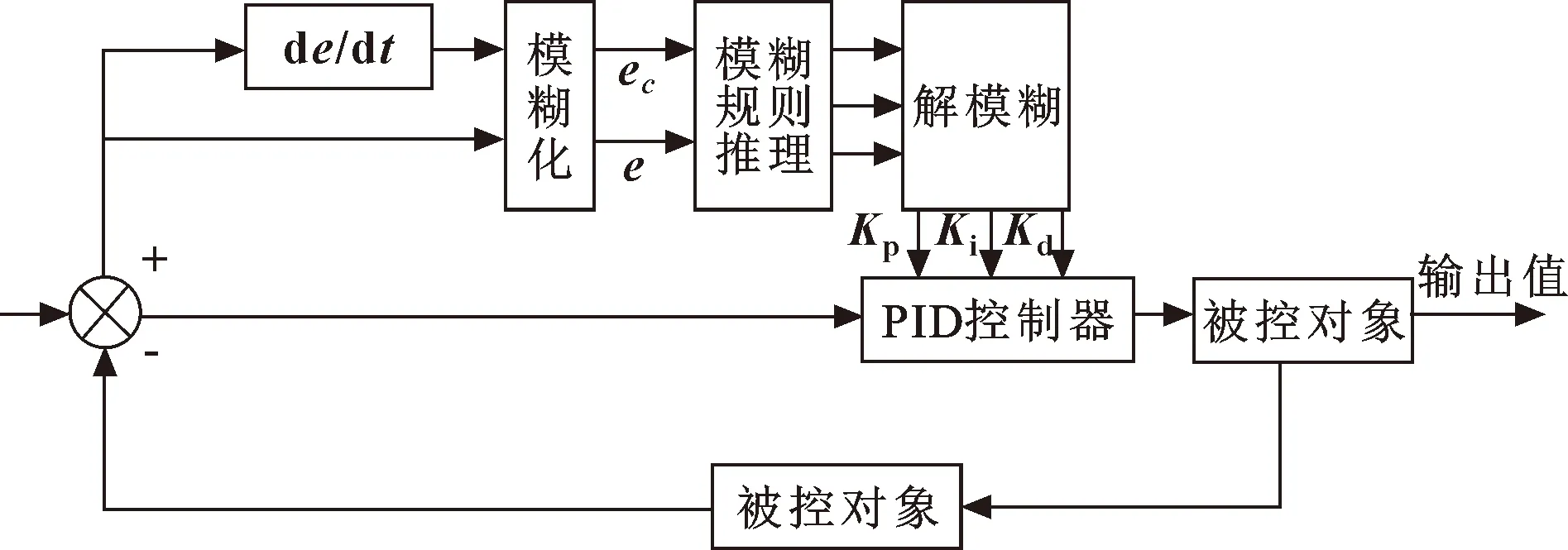
圖3 模糊自整定PID控制器原理
根據電液比例閥工作特點及大量仿真結果,模糊控制算法將輸入的誤差值e和誤差值變化率ec,以及輸出量比例因數變化量ΔKp、積分因數變化量ΔKi和微分因數變化量ΔKd在各自的論域內分成7個模糊語言集合部分,按照負大(NL)、負中(NM)、負小(NS)、零(ZE)、正小(PS)、正中(PM)、正大(PL)的順序進行輸入輸出的語言值分配。2個輸入值的論域規定為[-6,6],3個輸出值的論域規定為[-1,1]。
根據工程上的實際應用情況與仿真結果,推理采用mamdani法,解模糊法采用重心法。輸入值e隸屬度函數圖像如圖4所示,采用梯形函數與三角形函數結合的隸屬度函數,當偏差值較大時,采用取值范圍較大的梯形函數來大幅度調節PID參數,當偏差值較小時,采用靈敏度高且范圍小的三角形函數,對PID參數進行精密調整。ec對精度要求較高,所以全部采用三角形隸屬函數,如圖5所示。輸出值ΔKp,ΔKi和ΔKd的隸屬度函數則采用三角形函數與平滑無零點的高斯函數組成,如圖6所示。
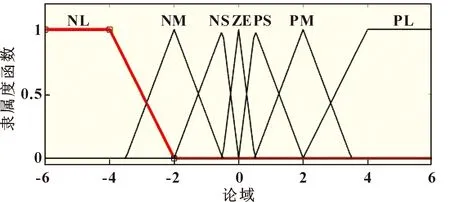
圖4 e的隸屬度函數
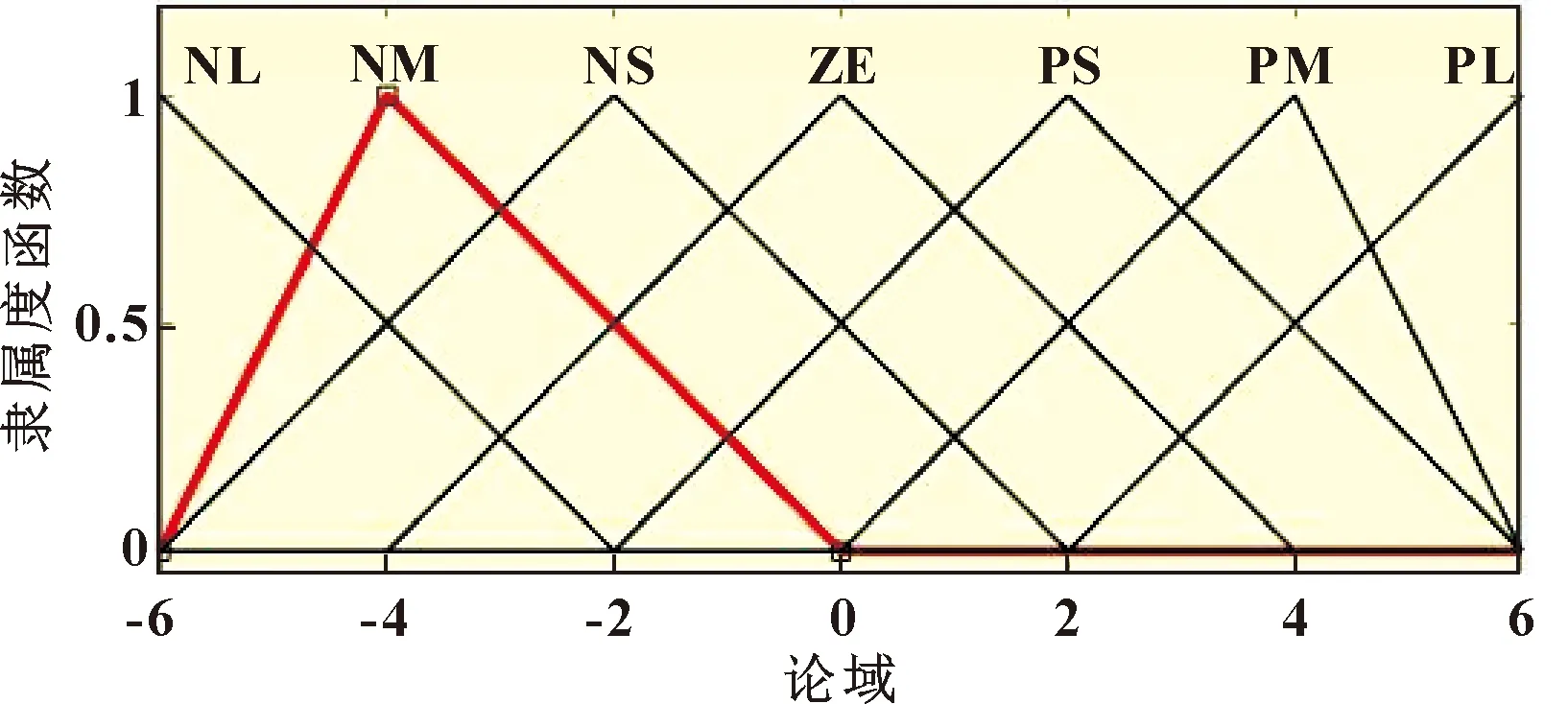
圖5 ec的隸屬度函數

圖6 Kp、Ki和Kd的隸屬度函數
模糊控制規則表是模糊控制的核心,結合仿真結果與實際應用需求,對ΔKp、ΔKi和ΔKd的參數整定規則大致如下:
(1)當差值e的絕對值相對較大時,為提高被控對象的相應速度,需要大幅度提高或降低ΔKp,此時,若偏差變化率ec較大,系統有時會因為Ki值過大,出現大幅度超調和積分飽和現象,此時應取ΔKi極小值,與此同時,為避免微分飽和現象的發生,應取較小的ΔKd;當偏差變化率ec較小時,需盡快穩定系統以及降低穩態誤差,稍微提高ΔKi,ΔKd維持不變;
(2)當差值e的絕對值適中時,需降低系統的超調現象,ΔKp稍微降低,取中等值,此時ΔKd的取值的影響較大,所以ΔKd的值要適中,以保證系統的響應速度;當偏差變化率ec較大時,可增加一些積分對控制的作用,ΔKi取大值;當偏差變化率ec較小時,為防止積分飽和,ΔKi取較小值;
(3)當差值e的絕對值較小時,為提高系統的響應速度與精度,ΔKp、ΔKi取較大值,同時為抑制系統擾動兼調節時間補償,一般情況下,當ec的值較小時,ΔKd可取大些,反之則應降低。
根據以上指導原則,設定模糊自整定PID的ΔKp、ΔKi和ΔKd的模糊規則分別如表1、表2、表3所示。
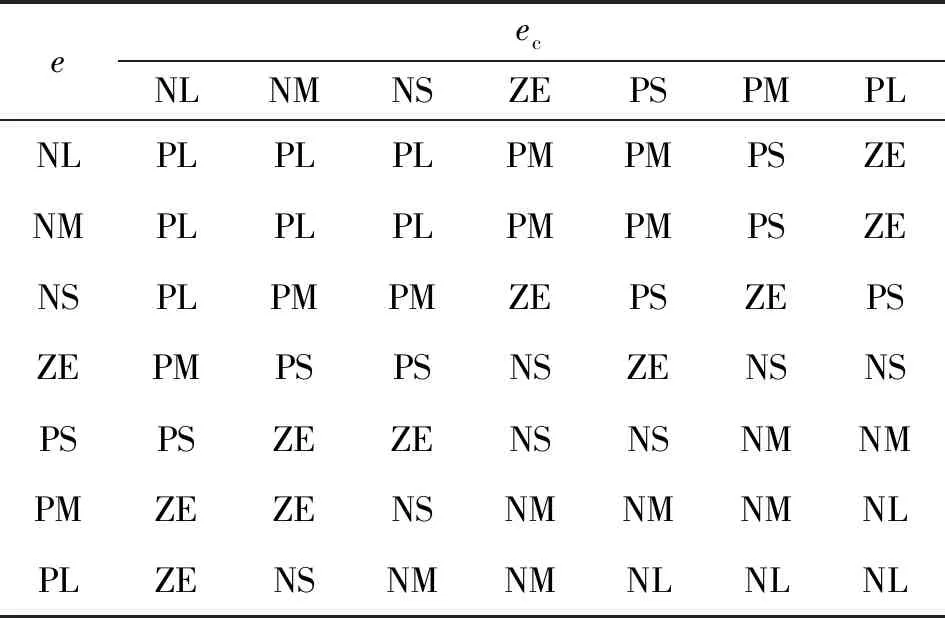
表1 ΔKp規則
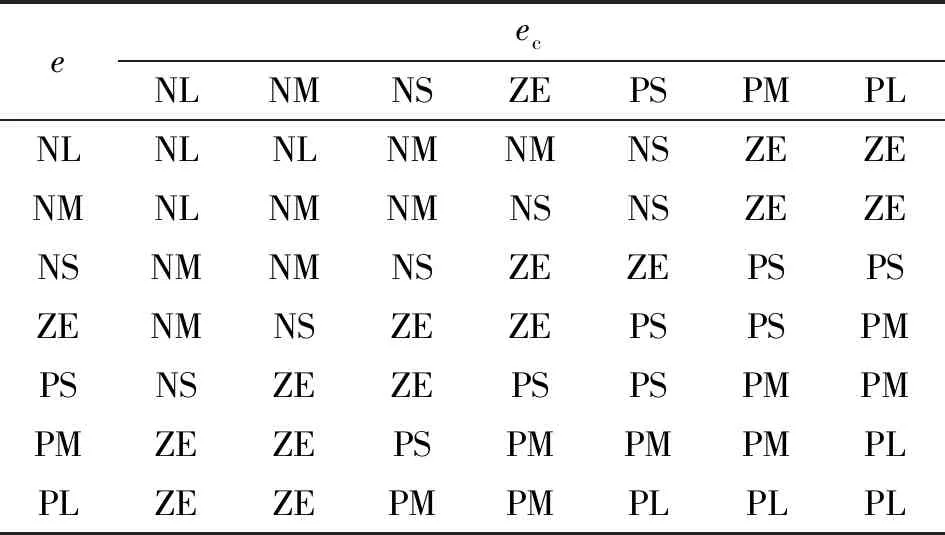
表2 ΔKi規則
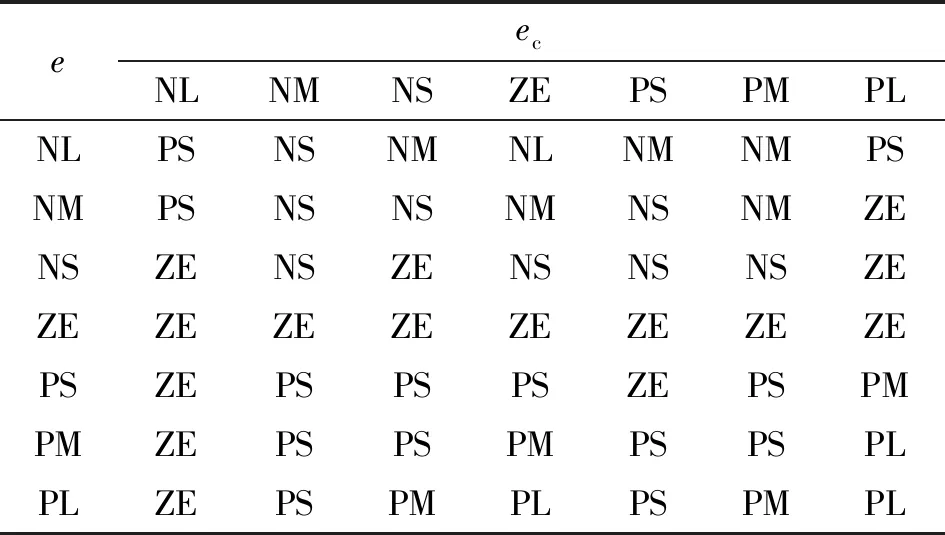
表3 ΔKd規則
3 仿真分析
3.1 仿真模型
SimulationX是一款基于Modelica語言的系統工程建模仿真軟件,在研究中,采用SimulationX軟件,對電液比例閥的液壓、機械部分進行仿真模型建立,如圖7所示,主要包括信號處理、先導閥、主閥、模擬負載與動力源部分。先導閥與主閥的模型均用質量-阻尼-彈簧的形式進行建模,主閥閥芯與動閥套選取液壓庫的運動活塞模塊實現液壓與機械環節的耦合。負載模擬部分采用節流閥,通過改變節流閥開度,調整電液比例閥閥口壓差。
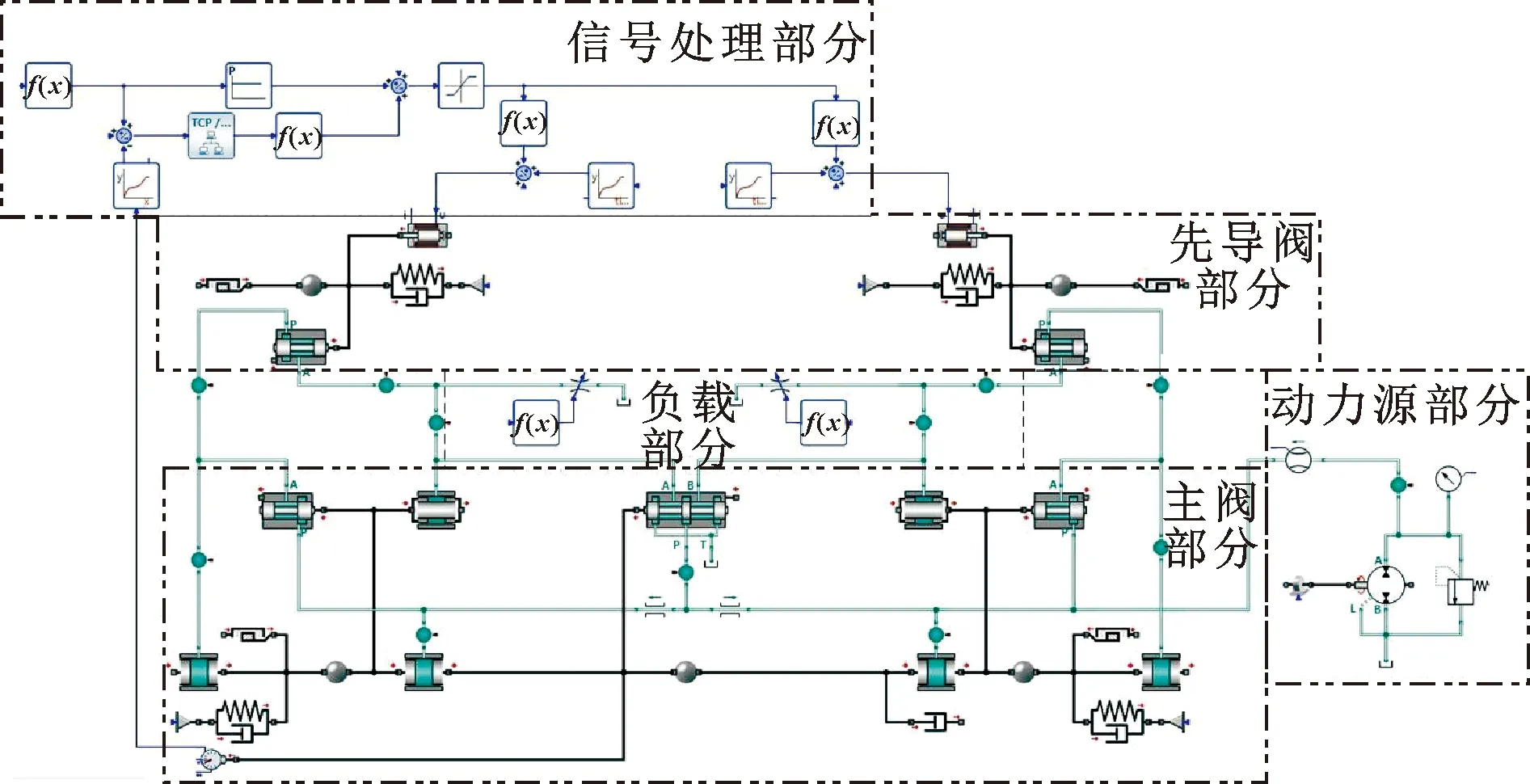
圖7 新型電液比例閥SimulationX建模
同時,SimulationX帶有與MATLAB進行數據傳輸的接口模塊,可實現SimulationX與Simulink軟件聯合仿真[23]。因此,在Simulink中進行模糊自整定PID控制系統的整體設計與建模,如圖8所示。
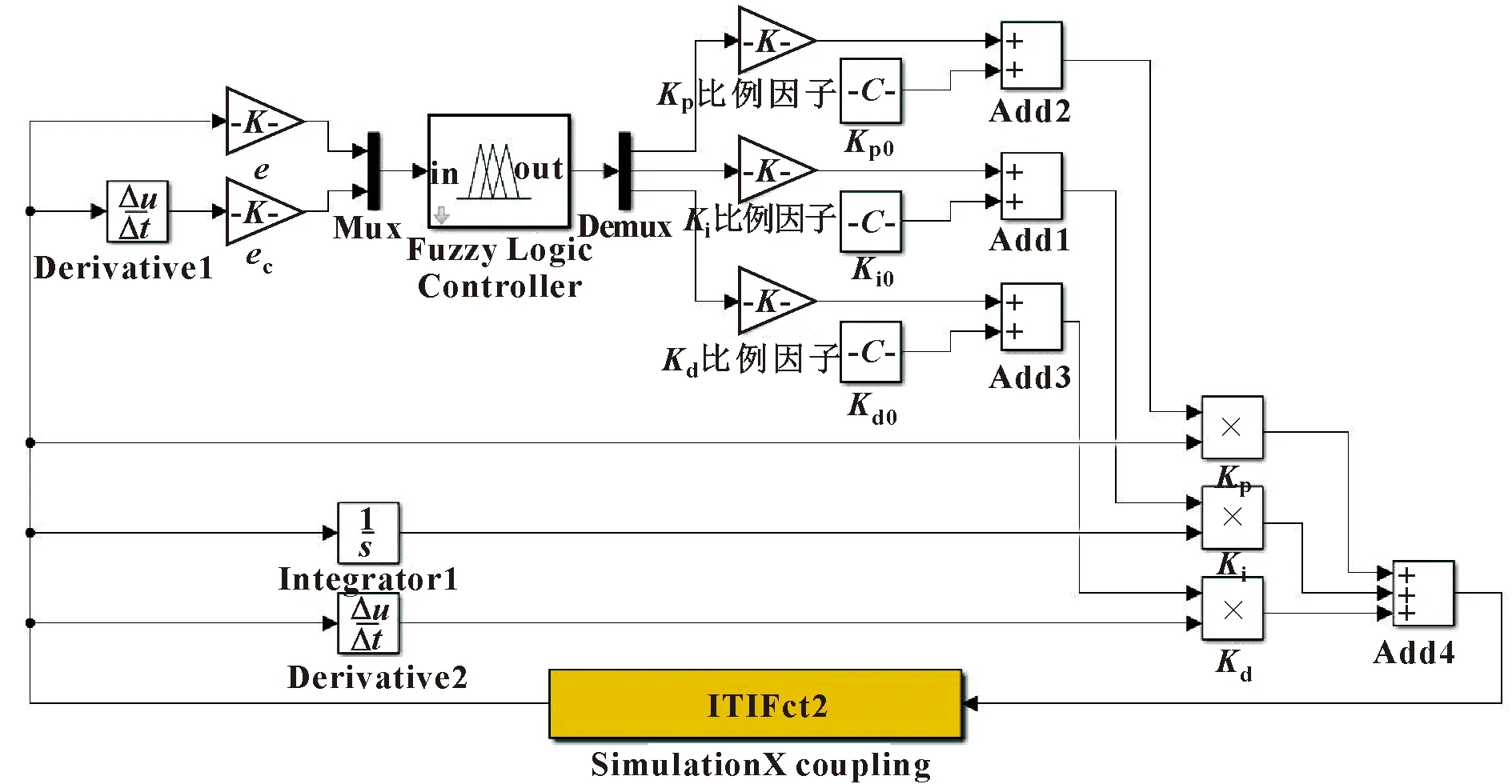
圖8 模糊自整定PID仿真模型
圖9所示為兩個軟件的聯合仿真示意圖。在SimulationX液壓模型中設置TCP/IP模塊,實現Simulation與Simulink軟件信號傳遞,實現電液比例閥聯合仿真。
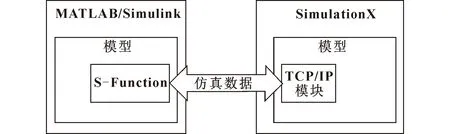
圖9 SimulationX與Simulink聯合仿真原理示意
3.2 仿真結果
根據電液比例閥結構參數,將傳統PID控制器參數分別設置為比例因數Kp=10.32、積分因數Ki=1.53、微分因數Kd=0.008。模糊算法具有穩定性強的特點,所以初始比例因數Kp0可以取更大的值而不會導致閥芯位移振蕩。采用模糊自整定PID控制器時,初始比例因數Kp0=14.2、積分因數Ki0=1.28、微分因數Kd0=0.033。
圖10所示為電液比例閥閥芯位移、流量隨控制信號變化曲線。在仿真過程中,調整負載節流閥閥口開度,使電液比例閥主閥壓降保持恒定,調節控制信號連續變化。由圖10可知:主閥閥芯位移與控制信號基本呈線性關系。由于反饋節流槽預開口量的影響,主閥流量存在一小段較為明顯的死區,可通過設置零位偏置,減小電液比例閥死區的影響。
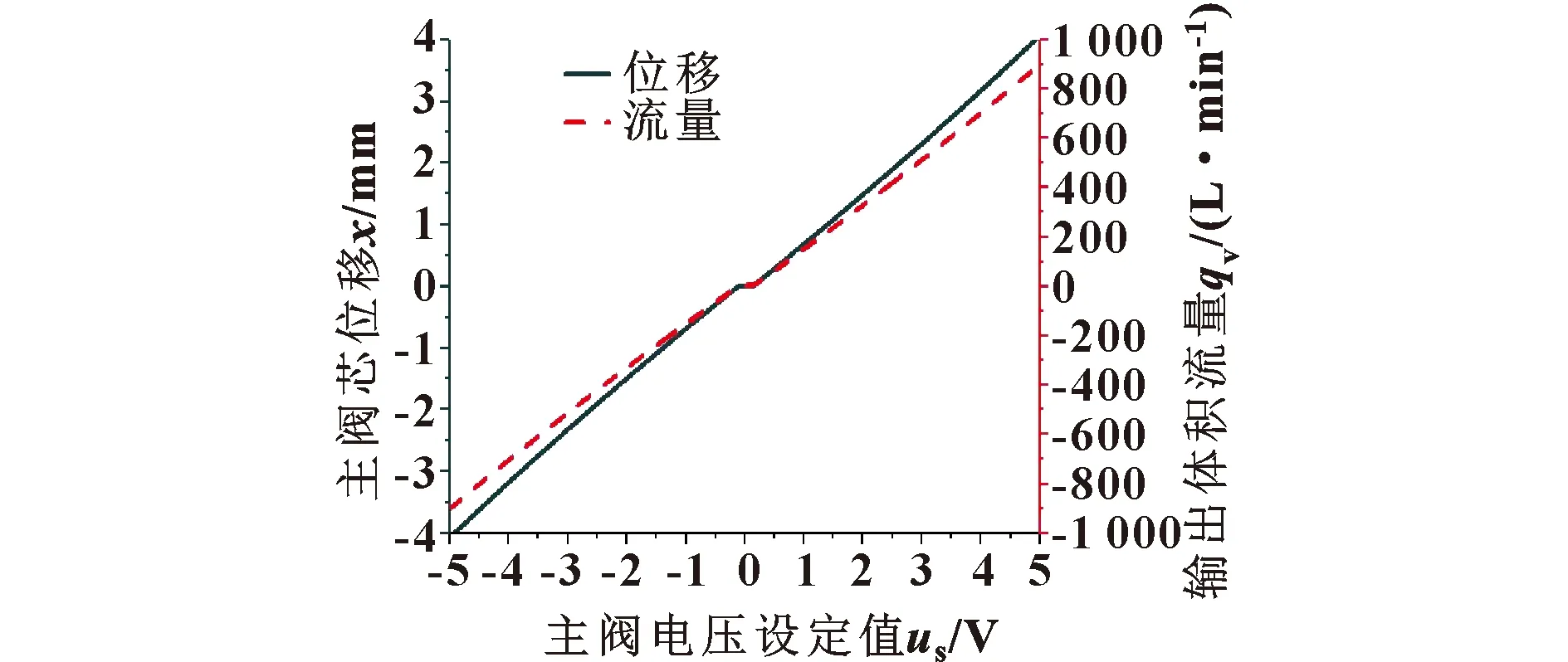
圖10 模糊控制下閥穩態控制特性仿真曲線
仿真過程中,給定相關的位移信號,連續調整電液比例閥主閥壓降,獲得如圖11所示的20%、60%和100%的閥芯位移與流量特性曲線。由圖11(a)可知:給定位移信號之后,隨著電液比例閥閥口壓降的增大,采用所設計的模糊控制器,電液比例閥閥芯位移基本不受壓差變化影響,具有良好的等位移控制特性。由圖11(b)可知:電液比例閥流量隨閥口壓降的增大逐漸增大,其曲線順滑,說明具有較好的流量剛性。
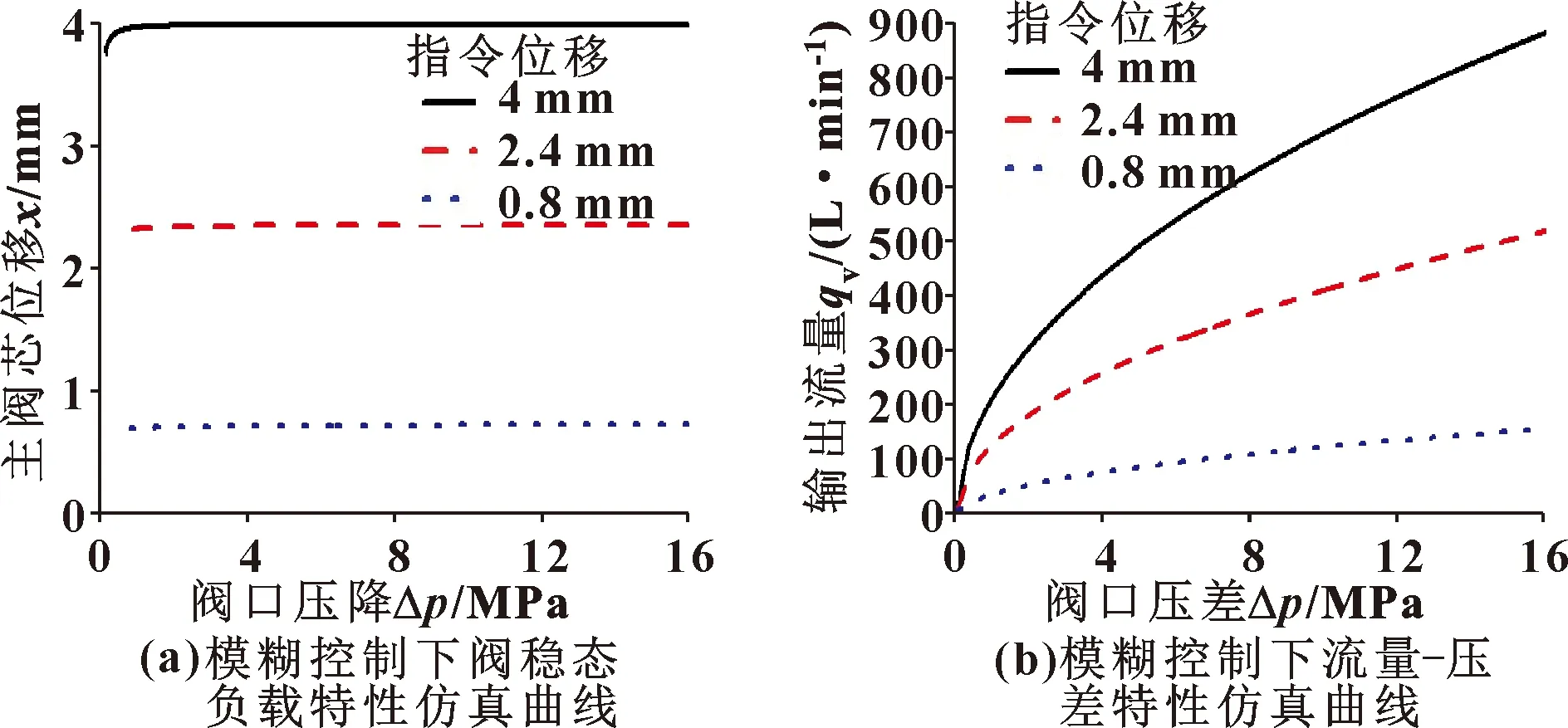
圖11 電液比例閥閥芯位移與流量特性曲線
仿真過程中,給定電液比例閥閥芯位移階躍控制信號,獲得如圖12(a)(b)所示的仿真結果。可知:針對該閥,雖然在初始響應速度上模糊PID與普通PID基本一樣,但相比普通PID,模糊PID更為穩定,且幾乎沒有超調現象,整體表現良好。針對80%、60%、40%、20%幅值的階躍信號輸入的仿真結果如圖12(c)所示。可以看到:在低負載狀況下,該模糊PID依然有著良好的表現。
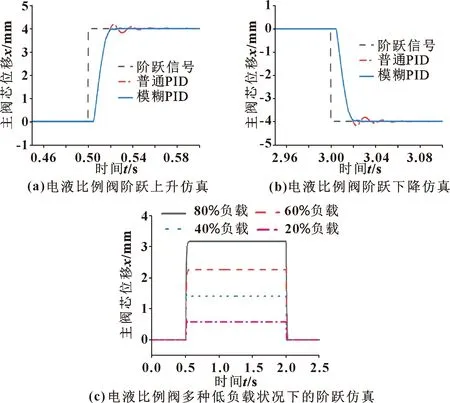
圖12 電液比例閥的階躍仿真
此外,在仿真過程中,給定電液比例閥閥芯位移4 mm、頻率1 Hz的正弦控制信號,獲得如圖13所示仿真結果。可知:針對該閥,采用模糊PID的跟蹤誤差比普通PID少0.03 mm,最大延遲時間比普通PID下降5 ms,且基本不存在失真現象,說明該模糊PID控制器針對正弦信號具有良好的跟蹤效果。

圖13 電液比例閥的正弦信號仿真
4 結論
采用位移流量反饋原理的新型電液電液比例閥具有優良的動靜態性能,但因為它具有的非線性,采用常規的PID控制系統難以獲得良好的控制性能。因此,本文作者設計了一種基于模糊控制原理的自整定PID控制器,并在SimultionX中建立了先導閥與該新型電液比例閥的模型,在Simulink建立了模糊PID模型;利用兩軟件進行聯合仿真。結果表明:該新型電液電液比例閥雖然在初始響應速度上沒有優勢,但模糊PID的穩定性表現仍然優于普通PID,且提高了該新型閥的整體動態性能。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06