雙余度機電作動系統靜態力均衡技術研究
2022-11-30 08:39:50楊建忠石林軒孫曉哲
機床與液壓 2022年22期
關鍵詞:系統
楊建忠,石林軒,孫曉哲
(1.中國民航大學安全科學與工程學院,天津 300300;2.中國民航大學天津市民用航空器適航與維修重點實驗室,天津 300300)
0 前言
隨著電傳飛控技術的發展,多電/全電飛機已成為未來民機的發展方向與趨勢,其中,大量采用電力作動技術是多電飛機最重要的特征之一[1]。現在的功率電傳作動器主要有電靜液作動器EHA(Electro-Hydrostatic Actuator)和機電作動器EMA(Electro-Mechanical Actuator),其中EMA直接采用電力驅動,完全消除了對液壓的依賴。雖然現階段由于機械卡阻等問題導致其不能大量應用到主飛行控制舵面上,但是它仍然是未來飛機實現多電/全電的關鍵應用[2]。波音787將EMA用在了擾流板和水平安定面[3]。C919的水平安定面也使用了EMA。
作動系統是飛行控制系統中關鍵的子系統,它必須要有很高的安全性和可靠性。根據適航規章25.1309要求,要保證其高安全性概率要求,一般采用余度技術,由于主動/主動的工作模式與主動/被動工作模式相比具有輸出力大、故障瞬態小、對故障檢測要求低等優點,被普遍認為是該系統應用在飛機上的優選形式[4]。目前,機電作動系統的架構布局以及工作驅動形式被廣泛研究和討論,包括歐盟和美國波音。1999年,由歐洲國家資助的HISYS項目中提出的一種雙余度的機電作動系統,2個余度之間完全獨立,沒有機械交聯,實現了最高的靈活性,該系統作為原型,在空客的集成測試臺進行了測試[5]。在波音的COVADIS項目中,以A320為原型開發了用在副翼上的機電作動器,它也是一種雙余度的架構布局,該系統進行了鐵鳥實驗以及飛行實驗[6]。
然而,要使這種余度主/主式EMAs能大量應用到飛行控制系統甚至是主控舵面上,需要解決的關鍵問題之一是力紛爭問題。由于并聯驅動舵面的各個通道的差異導致了作動器之間輸出位移和力不一致,引起同一舵面多個主動作動器之間互為負載和相互對頂的現象即為“力紛爭”現象。力紛爭現象長時間存在會使舵面結構疲勞甚至破壞,嚴重時影響飛行安全[4]。現在已經有大量關于余度液壓作動器以及液壓與功率電傳作動器的混合作動器的力紛爭研究并且取得了較為理想的成果,文獻[4,7-8]對傳統的余度作動系統的力紛爭研究提出了很多可以參考的均衡方案。WANG和MARé[9]在2014年提出了通過在位置控制回路中引入均衡偏移量,它是作為作動器之間的力差值的積分函數來實現靜態力均衡的。COCHOY等[10]提出了2種通過引入位移、速度以及力等差值反饋的控制策略,力紛爭現象得到了很好的改善。付永領等[11]在2014年提出了3種減小靜態力紛爭的力均衡控制策略,這些方法對力紛爭都有不同程度減弱效果。
現階段文獻研究對于余度EMAs的力紛爭研究甚少,因其力紛爭形成原因和機制的特殊性,在一定條件下會對系統造成較大影響,因此必須采取有效的方法將它消除或限制[12]。
德國宇航中心(DLR)在2017年研究總結了雙余度主/主式機電作動器系統的力紛爭形成的關鍵原因,仿真得出了這些原因能夠帶來的最嚴重的影響,總結出對該種系統采取力均衡控制的必要性。該機構在2018年研究了一種有效的力均衡控制方法,包括最優線性二次輸出調節器(LQR)的反饋回路和基于一般回歸神經網絡(GRNN)的前饋控制器,所實現的控制方案在與商用單通道飛機副翼物理特性相匹配的實驗平臺上進行了驗證[12-13]。但是這些研究沒有特別區分到動、靜態力紛爭機制上的不同,對其設計的力均衡控制方法在理論上也沒有針對性。
本文作者針對雙余度機電作動系統的特點,深入探究其靜態力紛爭產生的根本原因,并據此提出相應的靜態力均衡控制方案并仿真驗證其效果。
1 雙余度機電作動系統建模
1.1 EMA建模
所研究的EMA為齒輪驅動式,絲杠和電機單獨安裝,齒輪箱用于連接電機和螺母。忽略換相過程對無刷直流電機的影響,則基本方程[14]為
(1)
其中:Uc為控制電壓;Rc為繞組電阻;Lc為繞組電感;Cm為電磁轉矩系數;Ce為反電動勢系數;TL為電機軸的負載轉矩;i為電機電流;ω為電機角速度;Jm為電機側轉動慣量;Bm為阻尼系數;F為滾珠絲杠負載;ig為齒輪減速比;p為滾珠絲杠導程;x為作動器直線輸出位移。
系統仿真參數如表1所示。系統的參數由物理襟翼機電作動系統縮比模型經過系統辨識得到。

表1 系統仿真參數
根據系統參數和某商用飛機的系統性能要求設計了控制器[9],性能主要包括動態跟隨性能和抗負載性能。該系統采用三閉環控制,由外到內分別為位置環、轉速環、電流環。對設計的控制器進行仿真和實驗驗證。
1.2 舵面建模
研究的雙余度主/主式機電作動系統由2個相同的EMA并聯驅動舵面共同承擔負載,它與舵面的連接處用連接剛度來表示:
(2)
式中:kL1、kL2為連接剛度;x1、x2為輸出位移;F1、F2為輸出力;FL為舵面的外部空氣負載;xt為舵面位移;mt為舵面質量。
綜上,得到了考慮舵面氣動負載和連接剛度的雙余度機電作動系統的完整數學模型,如圖1所示。
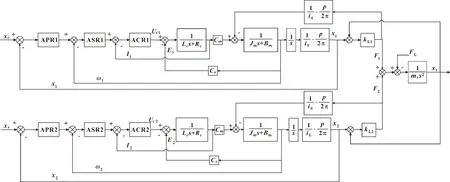
圖1 EMAs完整模型方塊圖
2 靜態力紛爭分析
當系統接受指令并到達穩態后,通道的輸出力持續不一致的現象就是靜態力紛爭;而動態力紛爭就是系統到達穩態之前的瞬態過程中通道輸出力不一致的現象。靜態力紛爭可以引起作動器之間長時間力不平衡的現象,嚴重時甚至會造成通道間不但沒有共擔負載,反而互為負載,從而可能會破壞系統結構,造成重大影響。動靜態力紛爭的定義如圖2所示。
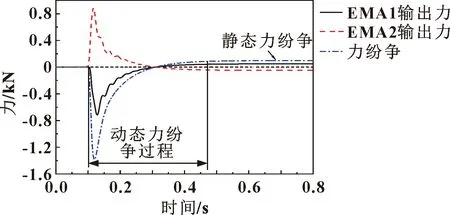
圖2 動靜態力紛爭定義
通過數學推導分析使系統產生靜態力紛爭的主要因素,并進行仿真分析和驗證,評估它們對力紛爭的影響程度,為下一步設計靜態力均衡控制方法提供理論依據和基礎。
2.1 靜態力紛爭數學分析
通過傳遞函數的方框圖等效,得到帶三閉環控制的雙余度機電作動器系統方塊圖如圖3所示。
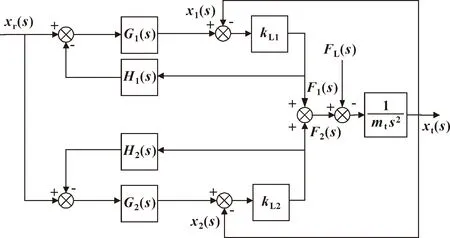
圖3 雙余度機電作動系統等效方塊圖
由圖3可得:
(3)
(4)
由于系統輸入的都是階躍信號,因此當系統達到穩態時,各部分的直流增益為
G1(0)=G2(0)=1;H1(0)=H2(0),代入式(3),并由式(3)—(4)可得:
(5)
所以當系統達到穩態時,得
(6)
以上只是一個理想情況。在實際系統中,還存在一些例如位置傳感器的反饋參數偏置、傳動裝置間隙等不確定性因素使得作動器輸出位置產生靜態偏差,這些因素也會引起系統產生一定程度的靜態力紛爭[11]。因此,2個通用的位置偏移E1和E2額外引入到公式中,它們可以用來代表所有因為系統不確定性因素導致的靜態位置誤差。式(6)經過改寫后,得到靜態力紛爭等式為
(7)
其中:E1為通道1的不確定性所造成的位置誤差;E2為通道2的不確定性所造成的位置誤差。
由式(7)可知:各個EMA的輸出力主要由2個因素決定的,分別是連接剛度不一致和不確定性因素造成的靜態位置誤差。
2.2 仿真分析與驗證
下面將通過2個實例仿真來驗證上述分析:
(1)為了不讓控制器進入飽和的非線性工作狀態,設置指令為0.1 s時1 mm的位置階躍信號,仿真EMA1位置傳感器反饋參數在-1%~1%偏置下的靜態力紛爭情況。
(2)保持2個作動器無位移輸出,負載力從-4 kN到4 kN緩慢變化。EMA1通道連接剛度為1.1×108N/m,EMA2連接剛度為1.0×108N/m。
根據2.1節中的理論分析,靜態位置誤差導致的靜態力紛爭情況應當符合式(8):
(8)
因此靜態力紛爭γ如式(9)所示:
γ=F1-F2=kL(0-E1)=-kL·E1
(9)
由于連接剛度不一致導致的靜態力紛爭情況應當符合式(10):
(10)
由圖4可以看出:靜態位置誤差以及負載力大小對靜態力紛爭的大小影響呈線性關系,其中靜態位置誤差造成的影響較大,而連接剛度不一致對靜態力紛爭產生的影響較小,但在大負載狀態下仍不可忽略。由此理論分析也得到了驗證。

圖4 靜態力紛爭
3 靜態力均衡控制技術設計
由上節可知,EMA的輸出力主要由2個因素決定,其中因為連接剛度無法輕易改變,因此選擇調節靜態位置偏差來緩解靜態力紛爭。
因此,文中設計了一個力均衡控制器,它通過補償各個通道中的位置反饋來改變位置誤差,從而消除靜態力紛爭。靜態力均衡控制方法如圖5所示,由此,將式(7)調整為
kL1·F1+E1=kL2·F2+E2+ECO
(11)
其中:ECO為補償的位置偏差量。
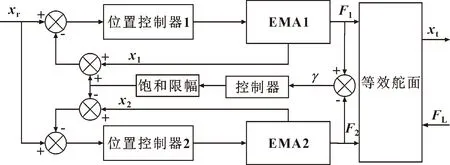
圖5 靜態力均衡控制方法
消除靜態力紛爭的過程其實就是消除穩態誤差的過程。根據經典控制理論,設計了2種控制器,并進行仿真驗證和分析。根據第2節的分析設置統一的仿真條件和指令以模擬靜態力紛爭的情況。
條件:通道1連接剛度為1.1×108N/m,通道2連接剛度1.0×108N/m,位置傳感器參數偏置1%。
指令:0.1 s時刻輸入1 mm的位置階躍指令,4 s時輸入8 kN的階躍負載力。這里用8 kN是為了提高連接剛度不一致產生的靜態力紛爭。
3.1 積分環節的力均衡技術
積分控制因長期、低頻的效果以及對動態性能影響小,可以減少各種響應的穩態誤差等特點,已被應用在其他類型作動器系統的力均衡技術上[15]。圖5中的控制器表達式為kI/s,其中kI為積分系數。
當力紛爭產生時,其值經過積分控制器后變為位移補償量,加入到通道的反饋回路中最終改變作動器的實際輸出位移量,并且該補償量逐漸累積直至沒有力紛爭,2個通道最終補償值的總和為式(11)中的ECO。下面仿真分析了它在雙余度機電作動系統中的力均衡效果,仿真結果如圖6所示。
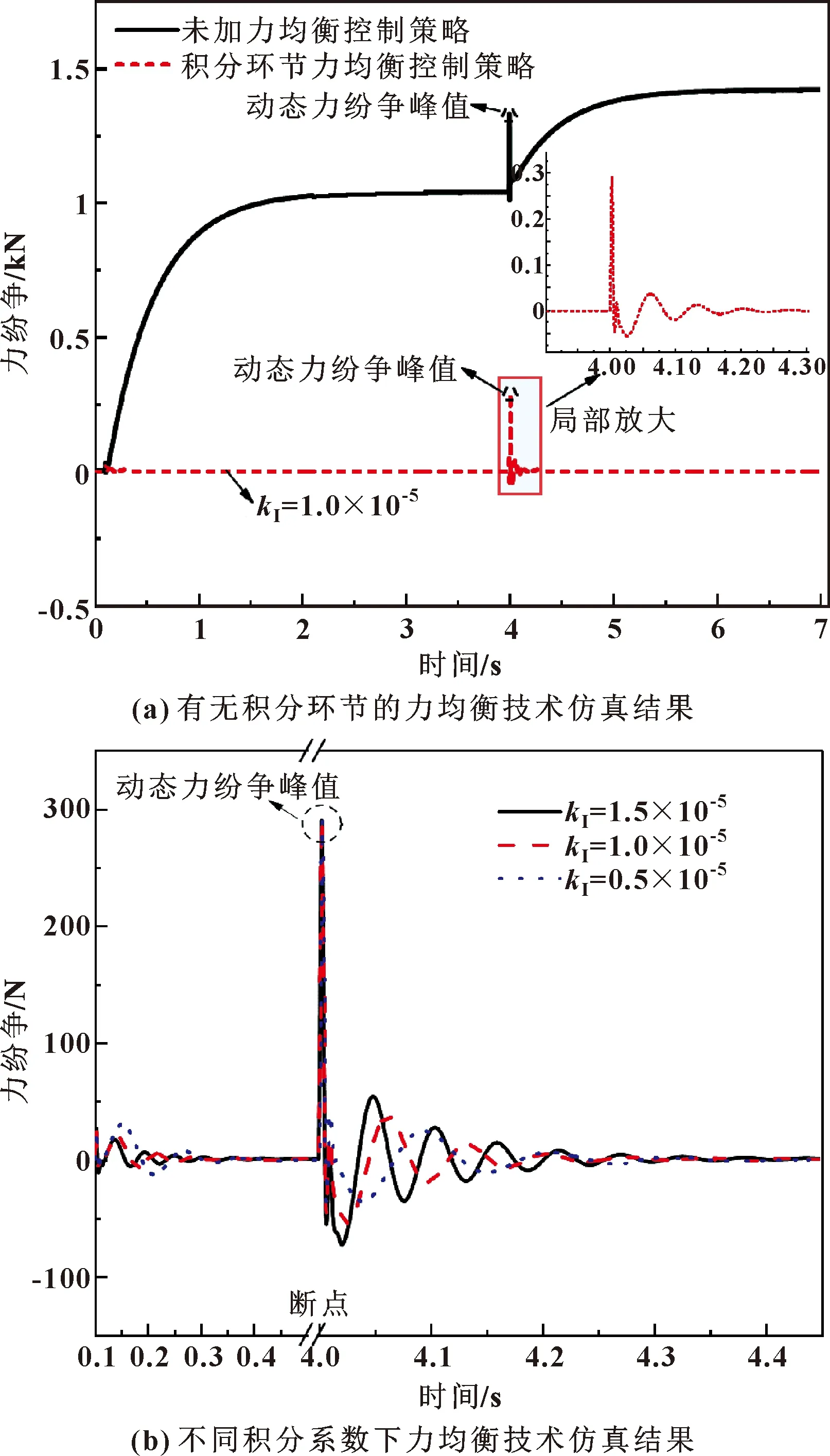
圖6 積分環節力均衡技術仿真
通過調參確定了積分環節中系數項kI的取值范圍。從圖6(a)可以看出,加入了積分環節的力均衡控制方法后,靜態力紛爭得到了消除。要注意的是,4 s時刻產生了一個由于負載階躍引起的動態力紛爭峰值,這一部分不在靜態力均衡的討論范圍里,因此不對該部分進行分析。
進一步觀察圖6(b)中3種系數下的積分環節控制方法的對比,可以看出:積分環節使得靜態力紛爭得到了消除,動態力紛爭的大小也在可接受范圍內,但其振蕩時間較長。此外,在無負載的位置跟隨狀態下,kI越小,振蕩的幅度越大。而在負載狀態下,忽略動態峰值,kI越大,其力紛爭的振蕩越劇烈。因此,積分環節系數的大小讓力紛爭在2種狀態下的穩定性表現上是相反的。綜上,純積分環節的力均衡技術可以很好地消除靜態力紛爭,但是在快速性上較差、動態時間較長。
3.2 比例積分環節的力均衡技術
針對傳統積分環節力均衡控制方法在快速性上的弱點,增加比例環節對其進行改進。圖5中的控制器表達式變為kP+kI/s。
仿真選取kP=0.5×10-6,kI=1.0×10-5。并且對比純積分環節kI=0.5×10-6的力均衡控制方法,結果如圖7所示。
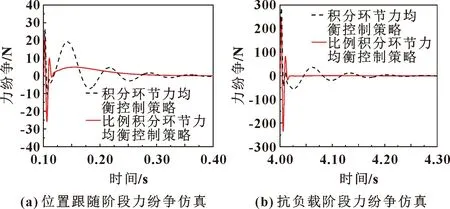
圖7 2種力均衡技術對比
從圖7中可以看到:比例環節會對力紛爭迅速作出反應,以減小偏差,并加快這一進程;而積分環節使得它能夠消除穩態誤差,使靜態力紛爭為0。此外,忽略初始時刻短暫的動態力紛爭峰值,其穩定性也優于純積分環節的力均衡技術。
3.3 總結
純積分環節的靜態力均衡控制技術可以很大程度上消除靜態力紛爭,但是其系數值的選取需要兼顧系統位置跟隨和抗負載擾動狀態下的表現,并且在快速性上較差、振蕩時間過長;改進后的比例積分環節力均衡技術在選取適當的系數值后,可以較快較穩定地消除該系統的靜態力紛爭。
4 結論
此研究主要得到以下主要結論:
(1)雙余度EMA中產生靜態力紛爭的兩大主要因素為通道間產生的靜態位置偏差以及通道間連接剛度不一致,并且其影響可以疊加。
(2)傳統積分環節的力均衡技術可以消除該系統的靜態力紛爭,但存在快速性差、振蕩時間過長的問題。經過改進后的比例積分環節的力均衡技術很好地解決了上述問題。
(3)靜態力均衡技術無法解決在系統某些條件下的動態力紛爭峰值問題,也無法避免動態上的振蕩現象,需要進一步研究動態力均衡控制方法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32