一種新型無碳小車的設計與計算
2022-11-29 02:22:28徐健城李卓恒謝舉澤陳博杰李德榮
機械 2022年10期
關鍵詞:設計
徐健城,李卓恒,謝舉澤,陳博杰,李德榮
一種新型無碳小車的設計與計算
徐健城,李卓恒,謝舉澤,陳博杰,李德榮*
(廣東海洋大學 機械工程學院,廣東 湛江 524088)
鑒于無碳小車軌跡的復雜程度,以往的轉向機構廣泛應用的曲柄滑塊機構和空間連桿機構已不適用于復雜多變的軌跡應用。本文提出一種新型凸輪轉向機構的設計方案,對凸輪的參數設計進行了詳細計算;給出無碳小車“S”和“8”字軌跡傳動系統的計算;為小車的可調性設計了一種簡易、實用性強的新型微調轉向機構;同時鑒于小車對精度的過度依賴,陳述了無碳小車設計建造及運行時的注意事項及其他細節設計與操作。
無碳小車;凸輪;傳動機構;微調轉向機構
2021年中國大學生工程實踐與創新能力大賽無碳小車賽項要求為:自主設計并制作一臺由重力勢能轉換為動能且具有方向控制功能的自行走勢能驅動車,該小車能按題設要求以“S”或“8”字軌跡繞圈循環行駛[1]。現有無碳小車設計制造方法包括基數學計算的直接調試與應用[2]、MATLAB仿真分析[3]、SolidWorks建模仿真[4]、運用解析法對RSSR曲柄搖桿機構進行運動學分析[5]等,以上方法多應用于往屆無碳小車的簡易軌跡設計中,特別是轉向機構廣泛應用的曲柄滑塊機構和空間連桿機構已不適用于復雜多變的軌跡應用,軌跡的參數和函數需要更新和重設,轉向機構也需重新設計。因此,本文提出一種應用于新型“S”型和“8”字軌跡的傳動,以及凸輪和微調轉向機構的設計和計算方法,總結出無碳小車設計建造及運行時的注意事項及其他細節設計與操作,并且小車在實際應用中證明了其可行性,為無碳小車的設計制造提供了新的數據和設計參考[6]。
1 小車總體設計
由于初賽和決賽的軌跡不同,小車需要根據實際情況更換傳動零件。本文設計的小車傳動比始終不變,使用一套傳動機構,不同軌跡只需更換凸輪和輪子大小即可完成同一輛小車行走兩種甚至更多的軌跡,且小車輪子設計較為簡單。小車采用三級傳動,增大了后輪軸與凸輪軸的距離,使凸輪可以做得相對大一些,同時車把寬不宜過小,可以降低小車凸輪對轉向機構的敏感度,增大小車的容錯率,降低小車調試難度。無碳小車整體結構如圖2所示。
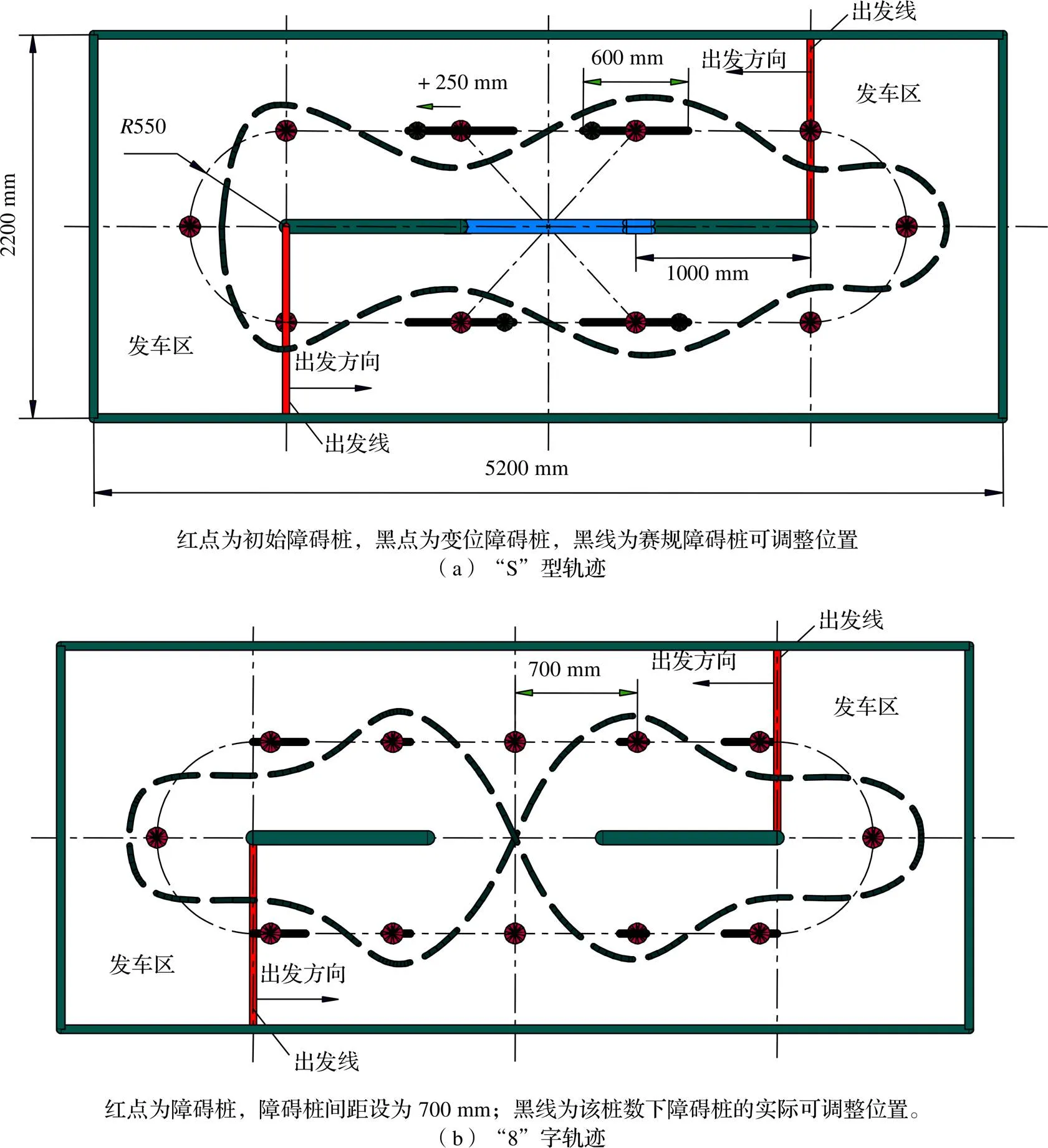
圖1 軌跡示意圖
2 小車總傳動比的設計與計算
小車出發到回到起點時凸輪軸剛好轉過一圈,在SolidWorks或CAD等軟件中畫出所需軌跡并計算出長度,得到輪子直徑、軌跡長度、傳動比的關系式[7]為:
依據小車實際設計大小可在表1所示范圍內選擇合適的傳動比。
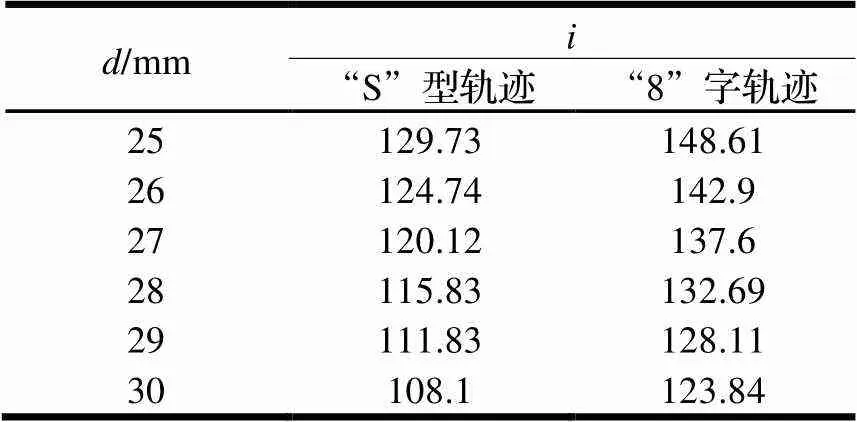
表1 傳動比與后輪直徑大小計算
在總傳動比確定下來后再考慮子傳動比的分配,因為齒輪[8]為標準件、且傳動比較大,選擇0.5模的齒輪最好,其齒隙更小、精密度更高,最后齒數合理安排即可。小車傳動機構如圖3所示。
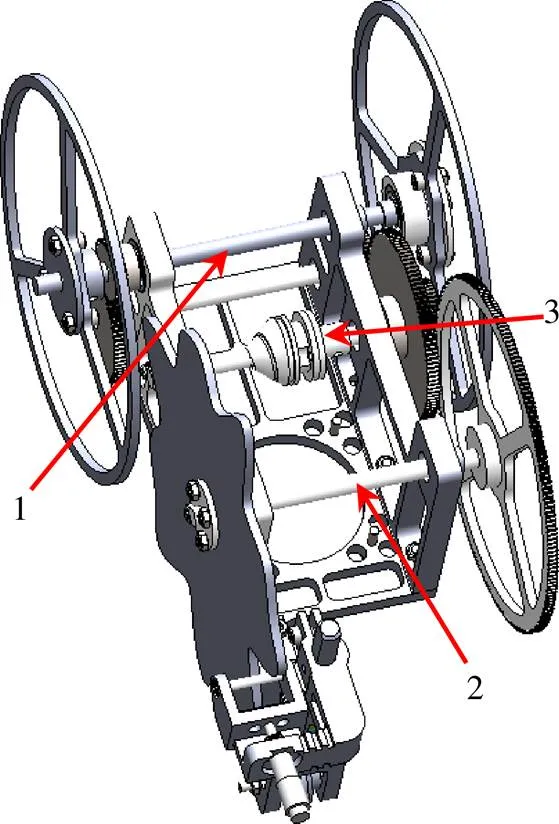
1.后輪軸;2.凸輪軸;3繞線軸。
3 凸輪的設計及計算
3.1 凸輪的設計依據
考慮軌跡的復雜程度,設計恰當的凸輪[9]可以使轉向機構按預期軌跡左右擺動,從而使小車走出正確的軌跡。凸輪采用激光切割亞克力板成型,結構簡單、緊湊,精度高,設計方便,后續可根據小車實際行走軌跡進行凸輪的再設計,使得小車軌跡調整后所進行的凸輪設計效率提高。
在小車設計過程中,凸輪基圓[10]越大,凸輪形狀越接近于圓,對軌跡調試中凸輪的設計越容易。本次小車凸輪轉向機構屬于對心直動滾子推桿盤型凸輪機構[11],參數可根據機械結構適當放大,在小車整體不宜過大和凸輪不宜過小的前提下,選取合適的凸輪基圓半徑。由凸輪推桿的位移與凸輪轉角的關系,進行凸輪基圓設計,凸輪基圓半徑越大則對應的壓力角越小。凸輪最小基圓半徑為:

式中:為偏距,mm;[]為最大許用壓力角,(°)。
最終確定凸輪基圓半徑0=60 mm。
利用SolidWorks畫出小車行走的軌跡,得出軌跡的點坐標集,運用MATLAB根據凸輪基圓和推桿半徑計算出推桿的位移,求出凸輪理論輪廓,最后算出凸輪的實際輪廓。
小車基本參數如表2和圖4所示。
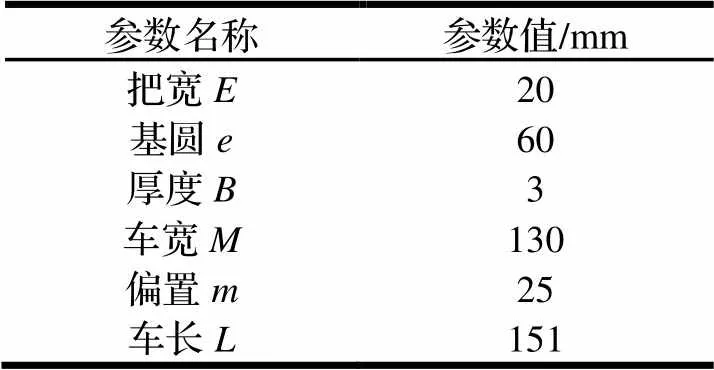
表2 小車基本參數
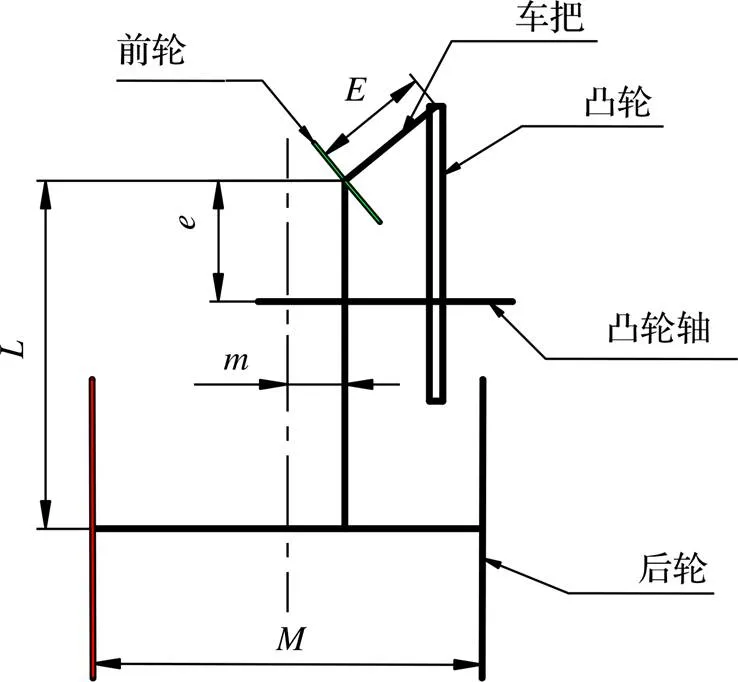
圖4 小車基本參數示意圖
3.2 凸輪的設計及計算
初步確定凸輪的基圓半徑為0=60 mm,推桿滾子半徑=3 mm。對小車轉向及推桿的基本運動情況進行分析,因其在運動過程中速度變化不大,可視推桿為等速運動,且凸輪工作環境低速輕載,其推程和回程運動規律可選用一次多項式運動規律。
選用“8”字小車出發點前兩樁軌跡(如圖5中深紅線軌跡所示)來舉例凸輪設計,其他軌跡以此設計方法類推。
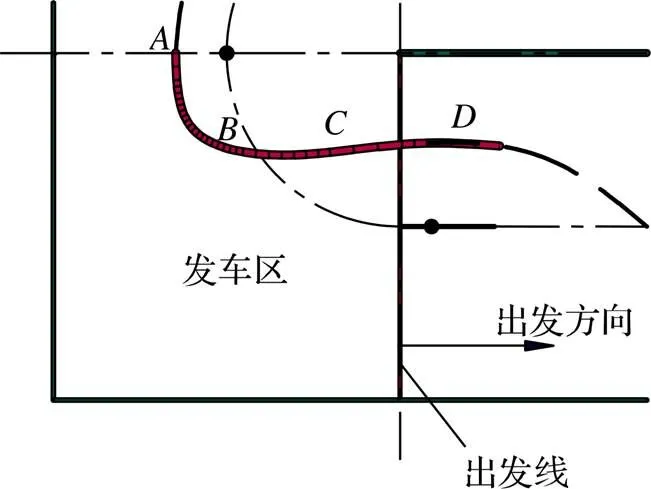
圖5 無碳小車出發起始位置圖
3.2.1 推桿的位移
推桿的多項式運動規律的一般表達式為:

式中:為推桿的位移;0、1、2、…、C為待定系數,可利用邊界條件等來確定;為凸輪轉角。
本車凸輪所接觸的推桿運動遵循一次多項式規律,凸輪以等角速度轉動,在推程時(圖5的段),凸輪的運動角為0,推桿完成行程為,得:
取邊界條件為:在始點處=0、=0,在終點處=0、=。
則可得0=0、l=/0,故推桿的推程運動方程為:
在回程時,規定推桿的位移總是由其最低位置算起,故是逐漸減小的,其運動方程為:
式中:0為凸輪回程運動角,此時總是從該段運動規律的起始位置計量起的。
代入小車數據得:
推程段:0=12°=1/15π,=9 mm,=0=135π,={0, 1/15π}
回程段:0=12°=1/15π,=9 mm,=(1-0)=9-135π,={0, 1/15π}
近休止段:0=20°=1/9π,=0,=0,={0, 1/9π}
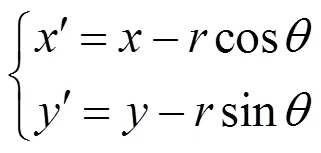
3.2.2 凸輪的理論輪廓(含滾子推桿半徑)
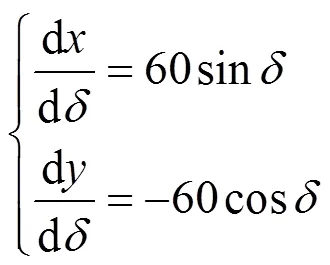
凸輪的理論輪廓方程式為:
在對心直動滾子推桿盤型凸輪機構中,凸輪理論輪廓線的坐標有=0、0=0=60 mm,代入即得凸輪3段的理論輪廓。
3.2.3 凸輪的實際輪廓
凸輪實際輪廓(,)對應坐標為:
=9 mm。
對凸輪的理論輪廓方程式求導得:
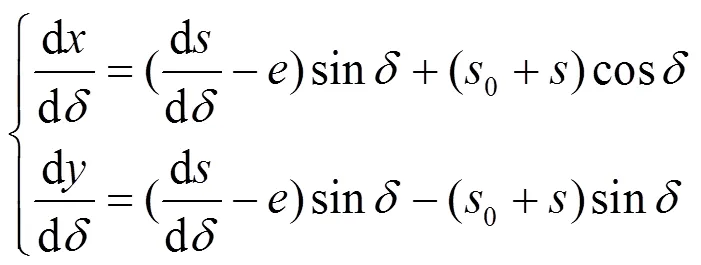
代入相關數據得:
推程段:
={0, 1/15π}
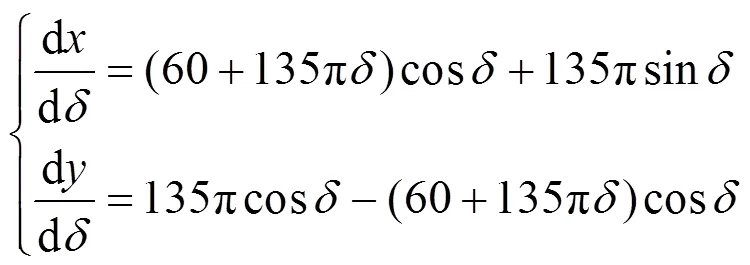
回程段:
={0, 1/15π}
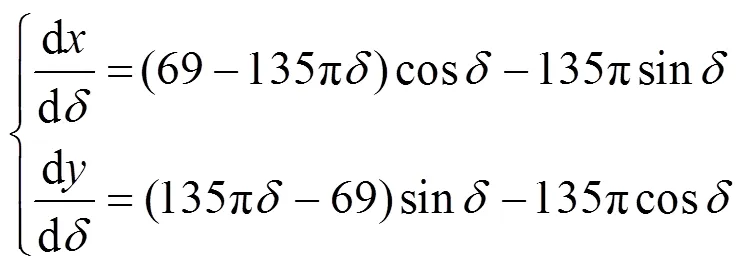
近休止段:
={0, 1/9π}
計算可得凸輪實際輪廓線各點的坐標如表3所示。最終由坐標導出CAD得出凸輪輪廓,完成凸輪的設計。
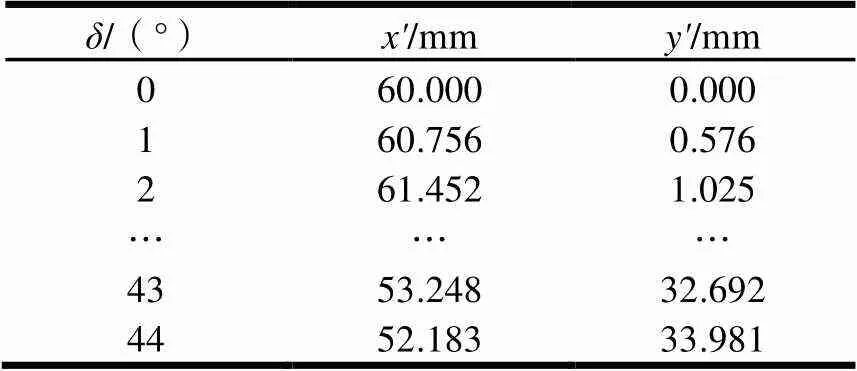
表3 凸輪輪廓坐標點
4 微調轉向機構的設計
由于存在加工、裝配、場地和不可控的人為誤差,小車實際行走軌跡會與理論行走軌跡有較大偏差,小車需增加微調機構修正誤差。本文給出一種簡單、可靠、拆卸便捷的微調轉向機構設計,如圖6所示。
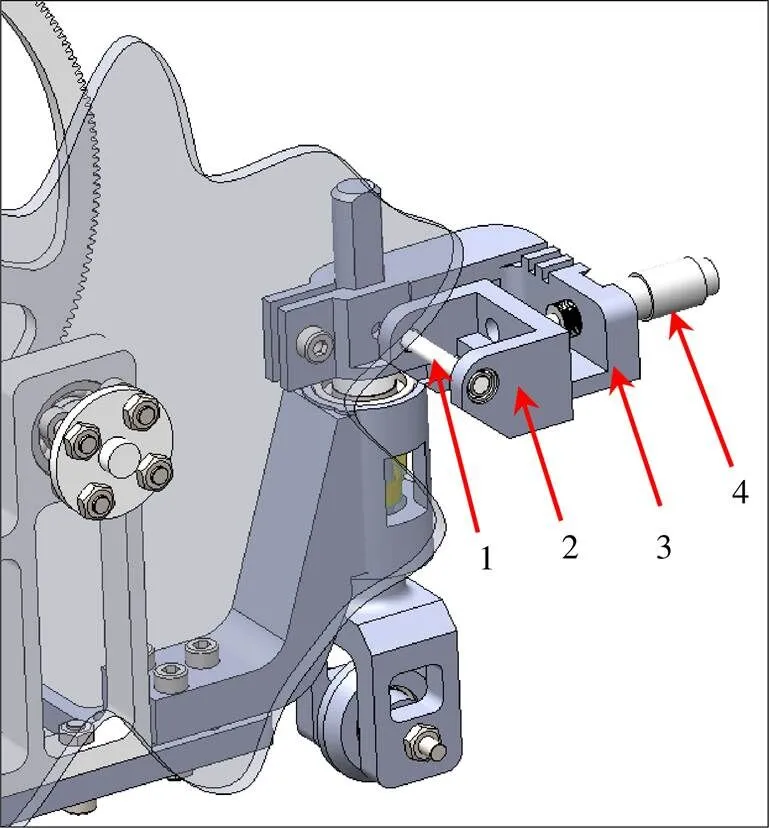
1.凸輪推桿;2.滑塊;3.導軌固定架;4.微分頭。
凸輪推桿由2個微型軸承固定于滑塊,凸輪與推桿實際運動為滾動摩擦,相比于固定不變的滑動摩擦凸輪能更加順利地轉動;微調機構可通過千分頭微調凸輪與滑塊的相對距離,從而微調小車實際行走軌跡;前輪固定軸內嵌旋轉彈簧,使推桿與凸輪在回程與去程之間保持密切接觸。旋轉彈簧安裝位置如圖7所示。
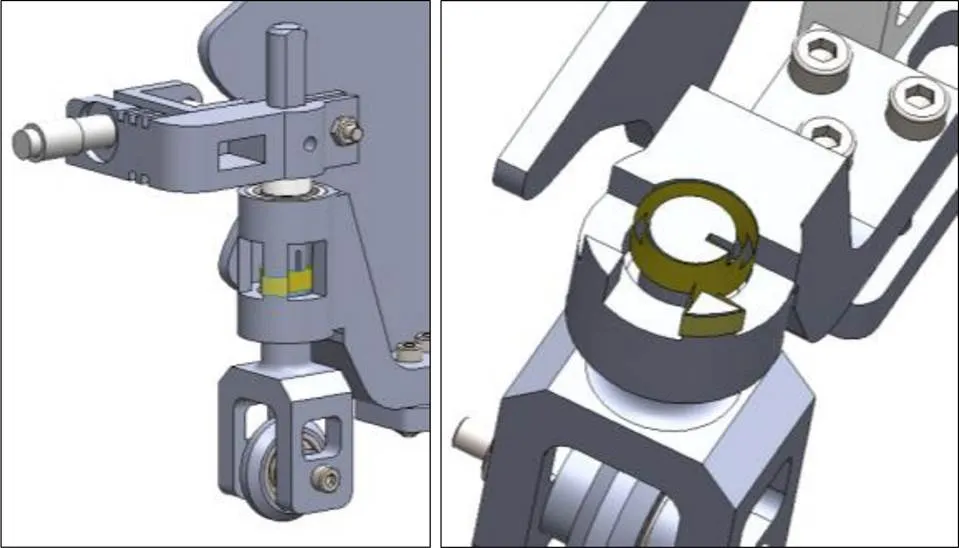
圖7 旋轉彈簧安裝示意圖
5 其他注意事項
(1)無碳小車的比賽場地具有極大的不確定性,其木板材料、干潔度、傾斜度等都會嚴重影響小車的正常發揮,除材料、傾斜度為不可控因素外,小車與場地的摩擦力是可以人為干預的。需要減少摩擦力時,通過酒精擦拭小車輪子和場地木板,使接觸面整潔光滑;需要增加摩擦力時可在輪子上粘電工膠布等方法增加阻滯力。
(2)繞線軸單獨設計為可拆卸式階梯繞線盤,如圖8所示,主要作用于小車啟動及后續的穩定行走。繞線軸半徑過小,則力矩小,啟動難;繞線軸半徑過大,則力矩過大,小車越走越快;合理運用階梯繞線盤,在安全啟動的同時可保持后續速度的穩定性。

圖8 可拆卸式階梯繞線盤示意圖
(3)對凸輪的修正,需要切(更凹)可以用小銼刀或手持式打磨機修正,需要加(更凸)則可以使用電工膠布修正。
(4)小車起始位置固定不變,設計亞克力定位尺。
(5)繞線高度:300 mm繞線高度控制需精準控制,通過砝碼內嵌螺紋吊鉤,利用螺紋旋入長短調節砝碼高度。
(6)凸輪與法蘭盤、法蘭盤與軸配合間隙要小才能做到零件更換后軌跡保持不變。
6 結語
對新型“S”軌跡和“8”字軌跡的傳動系統和凸輪進行設計及計算,為無碳小車的設計制造提供了新的數據和設計參考。提供了一種簡易實用、可靠性強的新型微調轉向機構,適用于以凸輪實現轉向功能的無碳小車或用于其他功能目的的凸輪搖桿機構,可簡化機構、提高經濟效益。
[1]徐子陽,常小龍,董龍豪. 一種重力勢能小車的結構設計[J]. 南方農機,2021,52(20):32-34,41.
[2]施栩,劉偉霖,閔睿,等. 基于余弦機構的S形無碳小車的優化設計[J]. 機械,2019,46(9):70-76.
[3]劉一樊,夏寅力,梁鎮海,等. 基于MATLAB的雙“8”字無碳小車軌跡仿真分析及其結構設計[J]. 機械設計,2020,37(7):8-13.
[4]倪莉,朱雪明,謝朝慧,等. 基于SolidWorks的無碳小車運動軌跡分析[J]. 機械工程師,2020(10):44-45,50.
[5]莊集超,曾嘉煜,張立群,等. 基于空間RSSR機構的8字無碳小車軌跡計算分析[J]. 機械,2017,44(12):5-8.
[6]馬雪亭,周嶺,張涵,等. 基于學科競賽的機械設計課程設計教學改革與實踐——以工程訓練綜合能力競賽為例[J]. 內燃機與配件,2022(2):241-243.
[7]黃淵,劉少飛,王雪陽. S型變樁距無碳小車設計及優化分析[J]. 機械制造與自動化,2021,50(2):200-204.
[8]孟永紅,張利軍,李衛軍,等. 齒輪模數對傳動性能的影響及選擇[J]. 四川水泥,2016(6):327.
[9]張楷锜,修峰翼,張予,等. 基于凸輪機構的“雙8”字型軌跡無碳小車設計[J]. 機械設計,2020,37(S1):24-28.
[10]孫幫華,張源淳. 直動從動桿盤形凸輪基圓半徑的確定[J]. 輕工科技,2017,33(12):50-51,55.
[11]陳華,羅康. 盤形凸輪機構虛擬樣機設計與運動仿真[J]. 裝備制造技術,2012(7):51-54.
Design and Calculation of a New Carbon-Free Car
XU Jiancheng,LI Zhuoheng,XIE Juze,CHEN Bojie,LI Derong
( College of Mechanical Engineering, Guangdong Ocean University, Zhanjian 524088, China )
Given the complexity of the carbon-free cartrajectory, the crank slider mechanism and spatial linkage mechanism widely used in the previous steering mechanism are no longer suitable for complex and changeable trajectory applications. In this paper, a design scheme of a new cam steering mechanism is proposed and the parameter design of the cam is calculated in detail. The calculation of s-shaped and 8-shaped track transmission system of carbon free trolley is given. A new type of simple and practical fine-tuning steering mechanism is designed for the adjustability of the trolley. In view of the excessive dependence of the car on accuracy, the paper states the precautions and other details of the design and operation of the carbon free car.
carbon-free car;cam;transmission mechanism;fine-tuning steering mechanism
TH11
A
10.3969/j.issn.1006-0316.2022.10.005
1006-0316 (2022) 10-0029-06
2022-01-25
徐健城(2001-),男,廣東惠州人,主要研究方向為機械電子工程,E-mail:1912787717@qq.com。
李德榮(1968-),男,湖北松滋人,碩士,高級實驗師,主要研究方向為數字化設計與制造技術、機電自動化裝備設計與制造,E-mail:lidr2008@163.com。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04