遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估研究綜述
2022-11-28 11:19:32黃濤張朝
航空科學(xué)技術(shù) 2022年11期
黃濤,張朝
1.沈陽(yáng)航空航天大學(xué)通用航空產(chǎn)業(yè)發(fā)展研究中心,遼寧 沈陽(yáng) 110136
2.沈陽(yáng)航空航天大學(xué),遼寧 沈陽(yáng) 110136
自20世紀(jì)以來(lái),機(jī)場(chǎng)高聳的塔臺(tái)一直是空中交通管制(ATC)的典型標(biāo)志,隨著航線干支網(wǎng)的發(fā)展、中小機(jī)場(chǎng)的興建以及通用航空的興起,中小機(jī)場(chǎng)昂貴的塔臺(tái)建設(shè)成本與低效的管制收益比例不合理現(xiàn)象越發(fā)嚴(yán)重。隨著高清視頻、全景增強(qiáng)視頻、網(wǎng)絡(luò)傳輸?shù)燃夹g(shù)的發(fā)展,遠(yuǎn)程塔臺(tái)技術(shù)為空中交通管制提供了新方向。
遠(yuǎn)程塔臺(tái)是地理位置和高度不受機(jī)場(chǎng)位置和構(gòu)型限制,通過(guò)遠(yuǎn)程監(jiān)視信息替代現(xiàn)場(chǎng)目視觀察來(lái)監(jiān)視機(jī)場(chǎng)及其附近區(qū)域或者機(jī)坪責(zé)任區(qū),為航空器提供機(jī)場(chǎng)管制服務(wù)(部分含進(jìn)近管制服務(wù))或機(jī)坪管制服務(wù)的設(shè)施設(shè)備集合,又稱(chēng)為數(shù)字塔臺(tái)[1]。一般包括相關(guān)席位設(shè)施設(shè)備、部署在遠(yuǎn)端機(jī)場(chǎng)的數(shù)據(jù)采集處理裝置以及傳輸鏈路設(shè)備等[2]。1996年,德國(guó)宇航中心(DLR)飛行制導(dǎo)研究所提出利用虛擬現(xiàn)實(shí)技術(shù)(VR)實(shí)現(xiàn)虛擬管制塔臺(tái)新工作環(huán)境的建議,開(kāi)始對(duì)歐洲和美國(guó)的最新VR技術(shù)進(jìn)行調(diào)查,初步塑造遠(yuǎn)程空中交通管制概念[3]。
安全是民航領(lǐng)域的第一要求。遠(yuǎn)程塔臺(tái)的出現(xiàn)是空中交通管制的范式轉(zhuǎn)換,對(duì)其進(jìn)行全方位的評(píng)估對(duì)民航安全的影響不言而喻。我國(guó)遠(yuǎn)程塔臺(tái)起步較晚,研究相對(duì)集中于技術(shù)系統(tǒng)與操作,對(duì)遠(yuǎn)程塔臺(tái)效能評(píng)估方面的研究相對(duì)匱乏,科學(xué)系統(tǒng)的評(píng)價(jià)指標(biāo)與評(píng)估方案還有待研究。對(duì)國(guó)內(nèi)外遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估研究發(fā)展現(xiàn)狀進(jìn)行綜述,可以對(duì)比總結(jié)遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估經(jīng)驗(yàn),完善評(píng)估指標(biāo),為遠(yuǎn)程塔臺(tái)運(yùn)行驗(yàn)證提供理論依據(jù),提升我國(guó)遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估工作,推廣遠(yuǎn)程塔臺(tái)運(yùn)行,助力我國(guó)民航空中交通管制服務(wù)降本增效。
2019年,中國(guó)民用航空局第二研究所圍繞遠(yuǎn)程塔臺(tái)提出“可運(yùn)行”“可視化”“可識(shí)別”“可通信”“可評(píng)估”的“五可”整體解決方案[4]。本文基于“可評(píng)估”解決方案,論述國(guó)內(nèi)外遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估現(xiàn)狀,提出遠(yuǎn)程塔臺(tái)運(yùn)行三級(jí)評(píng)估指標(biāo)體系,以便學(xué)者們展開(kāi)深層次的指標(biāo)測(cè)驗(yàn)研究,推動(dòng)我國(guó)遠(yuǎn)程塔臺(tái)發(fā)展。
1 遠(yuǎn)程塔臺(tái)研究現(xiàn)狀
1.1 國(guó)外遠(yuǎn)程塔臺(tái)研究現(xiàn)狀
自20世紀(jì)Fürstenau提出虛擬塔臺(tái)概念后,歐洲一直致力于遠(yuǎn)程塔臺(tái)運(yùn)行的發(fā)展,并在技術(shù)操作與運(yùn)行評(píng)估方面進(jìn)行了大量研究(見(jiàn)表1),通過(guò)梳理文獻(xiàn)可知,歐洲遠(yuǎn)程塔臺(tái)的評(píng)估主要包括情景感知評(píng)估及管制效率評(píng)估;評(píng)估方法主要分為主觀法及客觀法,主觀法主要為問(wèn)卷調(diào)查,客觀法包括視覺(jué)測(cè)試、眼動(dòng)測(cè)試、腦電信號(hào)測(cè)試、人在環(huán)路仿真、現(xiàn)場(chǎng)驗(yàn)證以及影子運(yùn)行。
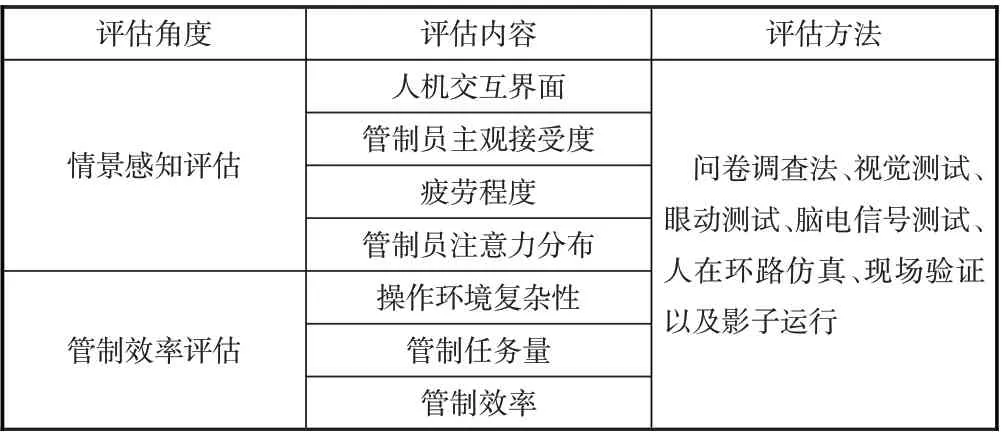
表1 遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估內(nèi)容及方法Table 1 Evaluation content and method of remote tower operation
1.1.1 情景感知評(píng)估
相較于傳統(tǒng)塔臺(tái)管制,情景感知評(píng)估是指在遠(yuǎn)程塔臺(tái)單元內(nèi),對(duì)管制員對(duì)管制對(duì)象的行為感知能力進(jìn)行評(píng)估,包括對(duì)航空器運(yùn)動(dòng)、態(tài)勢(shì)、距離等的判斷能力,旨在提高管制員情景感知力。
Fürstenau 為確定人機(jī)交互界面所需的視覺(jué)幀數(shù),組織多名現(xiàn)役管制員進(jìn)行飛機(jī)著陸過(guò)程中高動(dòng)態(tài)保真度模擬,為遠(yuǎn)程塔臺(tái)視頻技術(shù)最小視頻幀數(shù)指標(biāo)提供理論支撐[5]。為提升管制員情景感知能力,2010年,Schaik剖析傳統(tǒng)管制任務(wù)的視覺(jué)特征,分析得出遠(yuǎn)程塔臺(tái)操作的光學(xué)要求[6]。荷蘭國(guó)家航空航天實(shí)驗(yàn)室(NLR)在影子模式下進(jìn)行實(shí)時(shí)試驗(yàn)高級(jí)遠(yuǎn)程塔臺(tái)驗(yàn)證,并對(duì)傳感器和人機(jī)界面進(jìn)行設(shè)計(jì)和驗(yàn)證,以增強(qiáng)空中交通管制員在能見(jiàn)度降低的情況下的情景感知能力[7]。高質(zhì)量視頻數(shù)據(jù)是遠(yuǎn)程塔臺(tái)操作的核心組成部分,管制員可以根據(jù)這些信息做出決策[8]。Barrowclough通過(guò)解耦進(jìn)程有效地處理在單個(gè)遠(yuǎn)程管制中心的所有數(shù)據(jù),向管制員提供相關(guān)實(shí)時(shí)全景增強(qiáng)視頻系統(tǒng)[9]。
與主觀評(píng)估相比,神經(jīng)生理測(cè)量更加客觀,Aricò通過(guò)測(cè)量腦電信號(hào)(EEG)比較不同遠(yuǎn)程管制條件下工作量變化,為遠(yuǎn)程塔臺(tái)系統(tǒng)評(píng)估提供客觀定量的指標(biāo)[10]。管制員在人機(jī)交互界面系統(tǒng)之間的注意力分布是單個(gè)管制員執(zhí)行多個(gè)管制任務(wù)的關(guān)鍵人機(jī)交互問(wèn)題。Li 通過(guò)眼動(dòng)參數(shù)試驗(yàn)驗(yàn)證多重遠(yuǎn)程塔臺(tái)運(yùn)行場(chǎng)景,發(fā)現(xiàn)管制員的視覺(jué)注意力與管制任務(wù)種類(lèi)有明顯相關(guān)性,影響視覺(jué)注意力的因素包括視覺(jué)信息的呈現(xiàn)方式、視覺(jué)信息的復(fù)雜性以及操作環(huán)境的特征[11]。
為研究管制員在不同機(jī)場(chǎng)交通場(chǎng)景、遠(yuǎn)程輔助系統(tǒng)、工作場(chǎng)所設(shè)計(jì)對(duì)管制任務(wù)和管制工作量的影響,德國(guó)航空航天中心耦合實(shí)時(shí)仿真和快速仿真為一種新的仿真模型,高效驗(yàn)證各類(lèi)管制情景下管制員的情景感知能力,從而為遠(yuǎn)程塔臺(tái)運(yùn)行驗(yàn)證了大量人因工效指標(biāo)[12-13]。
1.1.2 管制效率評(píng)估
管制效率評(píng)估是指對(duì)遠(yuǎn)程塔臺(tái)管制員工作時(shí)間、工作強(qiáng)度、心理負(fù)荷、疲憊程度等方面進(jìn)行評(píng)估,旨在改進(jìn)工作環(huán)境與工作程序,提高遠(yuǎn)程塔臺(tái)管制效率。
為提升遠(yuǎn)程塔臺(tái)管制效率,Papenfuss 通過(guò)追蹤眼動(dòng)數(shù)據(jù)、主觀問(wèn)卷數(shù)據(jù)及訪談,分析管制員在管制任務(wù)中的信息獲取過(guò)程,模擬并評(píng)估低密度機(jī)場(chǎng)遠(yuǎn)程塔臺(tái)管制的效率[14];Ohneiser進(jìn)行了基于多重遠(yuǎn)程塔臺(tái)人在環(huán)路模擬塔臺(tái)管制命令的預(yù)測(cè)和提取研究,旨在減少管制員的工作量[15];Josefsson使用基于工作負(fù)載及特殊機(jī)場(chǎng)交通狀況的多目標(biāo)規(guī)劃,提出了遠(yuǎn)程塔臺(tái)中心管制員管制任務(wù)最佳分配方案,評(píng)估了遠(yuǎn)程管制不可預(yù)測(cè)的工作負(fù)載變化,為多重遠(yuǎn)程塔臺(tái)管制任務(wù)分配提供客觀解決方案[16];Kearney使用美國(guó)國(guó)家航空航天局任務(wù)負(fù)荷指數(shù)(NASA-TLX),通過(guò)綜合心理需求、體力需求、時(shí)間需求、努力程度、效績(jī)水平、挫折程度6個(gè)維度比較傳統(tǒng)塔臺(tái)操作和遠(yuǎn)程塔臺(tái)之間的工作量[17],發(fā)現(xiàn)空中交通管制員的精神需求、時(shí)間需求、努力和挫敗感在遠(yuǎn)程塔臺(tái)管制和傳統(tǒng)塔臺(tái)管制之間存在顯著差異,為遠(yuǎn)程塔臺(tái)管制員可以實(shí)現(xiàn)單一歐洲天空空中交通管理研究計(jì)劃的目標(biāo)提供了科學(xué)證據(jù),應(yīng)用于管制員的培訓(xùn)設(shè)計(jì)和遠(yuǎn)程塔臺(tái)系統(tǒng)設(shè)計(jì)[18]。
1.2 國(guó)內(nèi)遠(yuǎn)程塔臺(tái)研究現(xiàn)狀
遠(yuǎn)程塔臺(tái)可實(shí)現(xiàn)實(shí)時(shí)監(jiān)視、目標(biāo)識(shí)別及信息融合、自動(dòng)預(yù)警及信息疊加等功能[19]。結(jié)合遠(yuǎn)端傳輸?shù)默F(xiàn)場(chǎng)全景增強(qiáng)實(shí)時(shí)視頻,遠(yuǎn)程塔臺(tái)可以大幅增強(qiáng)管制員對(duì)機(jī)坪交通態(tài)勢(shì)的感知能力,提高管制員在低能見(jiàn)度和繁忙條件下的運(yùn)行指揮能力,促進(jìn)機(jī)場(chǎng)容量、安全和效率的提升[20]。我國(guó)遠(yuǎn)程塔臺(tái)研究起步較晚,研究主要集中在技術(shù)系統(tǒng)的優(yōu)化與模擬仿真方面,對(duì)于評(píng)估指標(biāo)及方案的研究相對(duì)匱乏,相較于歐美國(guó)家,我國(guó)在技術(shù)系統(tǒng)與運(yùn)行制度方面還處于跟跑階段。
圖像技術(shù)是遠(yuǎn)程塔臺(tái)的關(guān)鍵技術(shù),程擎通過(guò)梯度分水嶺圖像分割算法在運(yùn)算時(shí)間以及正確率兩個(gè)維度優(yōu)化機(jī)場(chǎng)監(jiān)控視頻圖像,在一定程度上解決了傳統(tǒng)SURF 計(jì)算重復(fù)率高、匹配時(shí)間長(zhǎng)的缺點(diǎn)問(wèn)題,提高了圖像處理技術(shù)的效率及魯棒性[21]。基于視頻MLAT 的遠(yuǎn)程塔臺(tái)能借助高清數(shù)字?jǐn)z像機(jī)、氣象傳感器、麥克風(fēng)和其他相關(guān)設(shè)備將偏遠(yuǎn)機(jī)場(chǎng)的實(shí)時(shí)情況準(zhǔn)確地投影到大型機(jī)場(chǎng)塔臺(tái)中心屏幕上,管制員通過(guò)視頻來(lái)掌控機(jī)場(chǎng)信息[22]。
運(yùn)動(dòng)目標(biāo)跟蹤是圖像處理的關(guān)鍵技術(shù)之一[23],為了提高運(yùn)動(dòng)分割的穩(wěn)定性和實(shí)時(shí)性,楊璐提出運(yùn)動(dòng)歷史圖像(MHI)算法做運(yùn)動(dòng)分割,為遠(yuǎn)程塔臺(tái)中的飛行器自動(dòng)跟蹤和沖突預(yù)警提供技術(shù)支持[24]。針對(duì)遠(yuǎn)程塔臺(tái)全景攝像機(jī)位置和高度的選擇具有經(jīng)驗(yàn)性,機(jī)場(chǎng)運(yùn)行存在安全隱患,劉穎從塔臺(tái)最低視線角和跑道的通視性、ILS 障礙物評(píng)定面和顯示系統(tǒng)分辨率方面,提出了全景攝像機(jī)位置和高度的約束方程組[25]。
在遠(yuǎn)程塔臺(tái)技術(shù)的模擬驗(yàn)證方面,程擎以樹(shù)莓派Raspberry Pi 3B型機(jī)為搭建基礎(chǔ),搭建遠(yuǎn)程終端,模擬實(shí)現(xiàn)遠(yuǎn)程終端影像視頻信息獲取、傳輸,溫濕度氣象數(shù)據(jù)的獲取,以及ADS-B信號(hào)接收等遠(yuǎn)程塔臺(tái)技術(shù)基本功能[26]。為了降低各個(gè)模塊之間的耦合性,提高系統(tǒng)可靠性,楊璐基于微服務(wù)架構(gòu)遠(yuǎn)程塔臺(tái)系統(tǒng),將微服務(wù)架構(gòu)根據(jù)圖像處理、基礎(chǔ)服務(wù)、第三方接口等分類(lèi)進(jìn)行分布式處理,實(shí)現(xiàn)一個(gè)監(jiān)控中心同時(shí)管制多個(gè)遠(yuǎn)端機(jī)場(chǎng)塔臺(tái)的場(chǎng)景[27]。劉亞威通過(guò)試驗(yàn)驗(yàn)證視聽(tīng)雙通道能夠顯著增強(qiáng)管制員的情景意識(shí),為提升遠(yuǎn)程塔臺(tái)人機(jī)交互水平提供理論支撐[28]。徐國(guó)標(biāo)分析了遠(yuǎn)程虛擬塔臺(tái)相關(guān)技術(shù)、系統(tǒng)的組成結(jié)構(gòu)及與傳統(tǒng)塔臺(tái)的功能對(duì)比[29]。徐斌等以新疆遠(yuǎn)程塔臺(tái)系統(tǒng)為基礎(chǔ),通過(guò)FMECA 可靠性分析方法對(duì)遠(yuǎn)程塔臺(tái)各個(gè)子系統(tǒng)進(jìn)行了可靠性分析,發(fā)現(xiàn)管制員情景意識(shí)建立程度對(duì)遠(yuǎn)程塔臺(tái)系統(tǒng)可靠性影響最大[30]。潘衛(wèi)軍詳細(xì)介紹了幾種可用于分析遠(yuǎn)程塔臺(tái)系統(tǒng)可靠性的方法,總結(jié)了適用于我國(guó)遠(yuǎn)程塔架系統(tǒng)可靠性分析的方法[31]。
由上述可以發(fā)現(xiàn),我國(guó)對(duì)遠(yuǎn)程塔臺(tái)評(píng)估的研究較為宏觀,集中于對(duì)遠(yuǎn)程塔臺(tái)系統(tǒng)整體可靠性的分析,對(duì)比國(guó)外豐富的情景感知和管制效率評(píng)估,缺少對(duì)人因工效指標(biāo)的研究,對(duì)具體評(píng)估指標(biāo)的研究相對(duì)匱乏,這也是本文的研究意義之一。
1.3 遠(yuǎn)程塔臺(tái)發(fā)展現(xiàn)狀
1.3.1 國(guó)外遠(yuǎn)程塔臺(tái)發(fā)展現(xiàn)狀
2014 年,單一歐洲天空空中交通管理研究計(jì)劃(SESAR)聯(lián)合執(zhí)行機(jī)構(gòu)(SJU)啟動(dòng)遠(yuǎn)程機(jī)場(chǎng)運(yùn)行概念(RACOON)項(xiàng)目,旨在演示為多個(gè)機(jī)場(chǎng)提供遠(yuǎn)程塔臺(tái)服務(wù)的可行性和成本效益[32],正式拉開(kāi)了遠(yuǎn)程塔臺(tái)管制服務(wù)的序幕,如圖1所示。
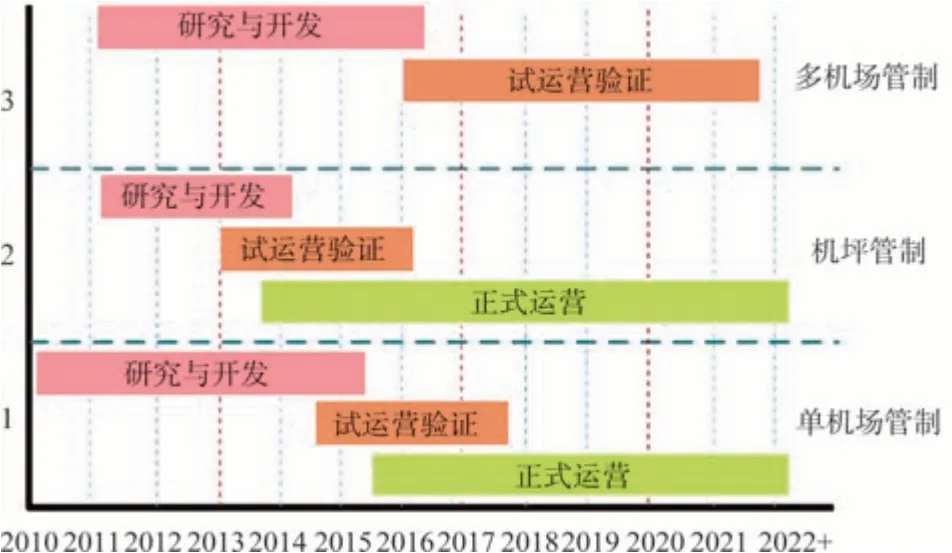
圖1 國(guó)外遠(yuǎn)程塔臺(tái)發(fā)展時(shí)間線Fig.1 Development timeline of foreign remote tower
2015 年,第一個(gè)完全符合國(guó)際民航組織要求的遠(yuǎn)程塔臺(tái)獲得批準(zhǔn)并在瑞典投入運(yùn)行;同年,德國(guó)核準(zhǔn)Saarbrucken機(jī)場(chǎng)進(jìn)行遠(yuǎn)程塔臺(tái)運(yùn)行[33]。2016 年,愛(ài)爾蘭正式展開(kāi)全世界第一個(gè)多重遠(yuǎn)程塔臺(tái)試點(diǎn)研究,該研究進(jìn)行了50 次從單塔運(yùn)行到多塔運(yùn)行的遠(yuǎn)程塔臺(tái)運(yùn)行的大規(guī)模示范試驗(yàn),供空中航行安全監(jiān)管機(jī)構(gòu)進(jìn)行安全評(píng)估[34]。2017 年起,德國(guó)空中導(dǎo)航服務(wù)提供商DFS為薩爾布呂肯這個(gè)中型機(jī)場(chǎng)提供機(jī)場(chǎng)控制服務(wù),這使薩爾布呂肯成為德國(guó)第一個(gè)遠(yuǎn)程控制的機(jī)場(chǎng)[35]。2018 年3 月,挪威空中導(dǎo)航服務(wù)商AVINOR 與英德拉對(duì)從一個(gè)遠(yuǎn)程地點(diǎn)同時(shí)管制多個(gè)機(jī)場(chǎng)進(jìn)行了首次成功驗(yàn)證,管制員從一體化管制席位為三個(gè)機(jī)場(chǎng)同時(shí)提供管制服務(wù),可以獲得所有相關(guān)信息和控制功能,包括雷達(dá)交通圖像、氣象信息、電子飛行進(jìn)程單等[36];同年8月,立陶宛空中導(dǎo)航服務(wù)商(ON)、德國(guó)航空航天中心在布倫瑞克對(duì)多重遠(yuǎn)程塔臺(tái)進(jìn)行了第二階段的驗(yàn)證。
2019年,巴西實(shí)施南美第一個(gè)遠(yuǎn)程空中交通管制塔,法西斯公司為巴西圣克魯斯空軍基地安裝遠(yuǎn)程塔臺(tái)技術(shù)[37],至此遠(yuǎn)程塔臺(tái)在民用航空與軍用航空中皆有應(yīng)用;同年,澤西機(jī)場(chǎng)成為英國(guó)第一個(gè)使用數(shù)字遠(yuǎn)程塔臺(tái)技術(shù)管理空中交通的機(jī)場(chǎng),標(biāo)志著遠(yuǎn)程塔臺(tái)首次被用于在英國(guó)商用飛機(jī)的管制[38]。2020 年,丹麥航空公司利用FREQUENTIS DFS AEROSENSE集成的遠(yuǎn)程塔臺(tái)和進(jìn)近中心來(lái)解決空域效率和服務(wù)提供問(wèn)題[39];同年,英國(guó)皇家空軍在其位于蘇格蘭的萊斯茅斯基地選擇薩博數(shù)字空中交通解決方案進(jìn)行數(shù)字塔臺(tái)能力的作戰(zhàn)概念論證[40]。
1.3.2 國(guó)內(nèi)遠(yuǎn)程塔臺(tái)發(fā)展現(xiàn)狀
2015年,中國(guó)民航局印發(fā)《中國(guó)民航航空系統(tǒng)組塊升級(jí)(ASBU)發(fā)展與實(shí)施策略》,明確提出發(fā)展遠(yuǎn)程塔臺(tái)[41]。2019 年11 月24 日,浙江省飛服中心遠(yuǎn)程塔臺(tái)成功完成了中國(guó)民航史上首次航空器起降遠(yuǎn)程指揮試驗(yàn)[42]。2020年5月21 日,新疆那拉提機(jī)場(chǎng)試運(yùn)行遠(yuǎn)程塔臺(tái)技術(shù),成為國(guó)內(nèi)首個(gè)成功試運(yùn)行遠(yuǎn)程塔臺(tái)的運(yùn)輸機(jī)場(chǎng)[43];同年,民航安徽空管分局啟動(dòng)了與池州九華山機(jī)場(chǎng)聯(lián)合開(kāi)展遠(yuǎn)程塔臺(tái)試點(diǎn)的工作,目前安徽空管分局遠(yuǎn)程塔臺(tái)項(xiàng)目已進(jìn)入建設(shè)階段[44]。2021年,民航天津空管分局提出推進(jìn)遠(yuǎn)程塔臺(tái)管制工作來(lái)延長(zhǎng)民航管制人員職業(yè)生涯的可行性[45]。此外,廣州白云機(jī)場(chǎng)、貴陽(yáng)龍洞堡機(jī)場(chǎng)、珠海金灣機(jī)場(chǎng)探索遠(yuǎn)程塔臺(tái)機(jī)坪管制服務(wù)并取得工程化應(yīng)用[46];內(nèi)蒙古錫林浩特機(jī)場(chǎng)、二連浩特機(jī)場(chǎng),云南寧蒗瀘沽湖機(jī)場(chǎng),青海遠(yuǎn)程塔臺(tái)試點(diǎn)陸續(xù)開(kāi)展遠(yuǎn)程塔臺(tái)試點(diǎn)工作,其中青海遠(yuǎn)程塔臺(tái)試點(diǎn)試驗(yàn)開(kāi)展多重遠(yuǎn)程塔臺(tái)空中交通管制服務(wù);順豐無(wú)人機(jī)聯(lián)合多家科技企業(yè)預(yù)打造“遠(yuǎn)程塔臺(tái)+無(wú)人機(jī)”運(yùn)行模式,共同開(kāi)展通航遠(yuǎn)程塔臺(tái)在國(guó)內(nèi)的全面推廣工作[47]。
在規(guī)章制度方面,我國(guó)已頒布了《遠(yuǎn)程塔臺(tái)技術(shù)需求(意見(jiàn)征求稿)》、《遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估規(guī)范(意見(jiàn)征求稿)》,對(duì)我國(guó)遠(yuǎn)程塔臺(tái)的評(píng)估具有指導(dǎo)意義。
通過(guò)上述可知,雖然我國(guó)遠(yuǎn)程塔臺(tái)發(fā)展勢(shì)頭強(qiáng)勁,但起步時(shí)間晚,各類(lèi)模式驗(yàn)證時(shí)間較國(guó)外都有4~5 年的差距,見(jiàn)表2。

表2 國(guó)內(nèi)外遠(yuǎn)程塔臺(tái)首次運(yùn)行時(shí)間比較Table 2 Comparison of first operation time of remote tower at home and abroad
2 遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估概念
2.1 遠(yuǎn)程塔臺(tái)功能模塊及運(yùn)行模式
2.1.1 遠(yuǎn)程塔臺(tái)功能模塊
遠(yuǎn)程塔臺(tái)功能模塊主要包括遠(yuǎn)程監(jiān)視模塊、語(yǔ)音通信模塊、網(wǎng)絡(luò)傳輸模塊、管制人機(jī)交互管理模塊、綜合信息模塊、遠(yuǎn)程控制模塊、輔助功能模塊、技術(shù)監(jiān)控模塊。
(1)遠(yuǎn)程監(jiān)視模塊:用遠(yuǎn)程監(jiān)視替代現(xiàn)場(chǎng)目視觀察,為管制員提供感知遠(yuǎn)端機(jī)場(chǎng)及附近區(qū)域或完整的機(jī)坪責(zé)任區(qū)域?qū)崟r(shí)運(yùn)行狀態(tài)的相關(guān)監(jiān)視信息。
(2)語(yǔ)音通信模塊:為遠(yuǎn)程塔臺(tái)單元與機(jī)場(chǎng)、航空器之間提供連續(xù)、穩(wěn)定、可靠的語(yǔ)音通信。
(3)網(wǎng)絡(luò)傳輸模塊:遠(yuǎn)程塔臺(tái)單元與機(jī)場(chǎng)、航空器之間的網(wǎng)絡(luò)傳輸鏈路,保障機(jī)場(chǎng)、航空器與遠(yuǎn)程塔臺(tái)單元之間數(shù)據(jù)傳輸?shù)倪B續(xù)性、穩(wěn)定性和可靠性。
(4)管制人機(jī)交互管理模塊:為管制員提供圖形用戶界面及其他技術(shù)系統(tǒng)交互的接口,其主要功能是向管制員提供管制相關(guān)信息,管制員可通過(guò)人機(jī)交互界面輸入新信息或修改已有信息。
(5)綜合信息模塊:為管制員提供管制相關(guān)的航空情報(bào)、航空氣象、靜態(tài)資料等綜合信息。
(6)遠(yuǎn)程控制模塊:遠(yuǎn)程監(jiān)控遠(yuǎn)端機(jī)場(chǎng)助航燈光,并能獲取遠(yuǎn)端機(jī)場(chǎng)照明、警報(bào)等相關(guān)基礎(chǔ)設(shè)施的工作狀態(tài)信息。
(7)輔助功能模塊:包括遠(yuǎn)程塔臺(tái)單元正常運(yùn)行所需的輔助功能,一般不直接影響遠(yuǎn)程塔臺(tái)正常運(yùn)行,如記錄、回放、數(shù)據(jù)分析等。
(8)技術(shù)監(jiān)控模塊:對(duì)遠(yuǎn)程塔臺(tái)技術(shù)系統(tǒng)的運(yùn)行情況進(jìn)行監(jiān)控,并輸出相應(yīng)的系統(tǒng)運(yùn)行狀態(tài)信息。
各功能模塊相互關(guān)系如圖2所示。
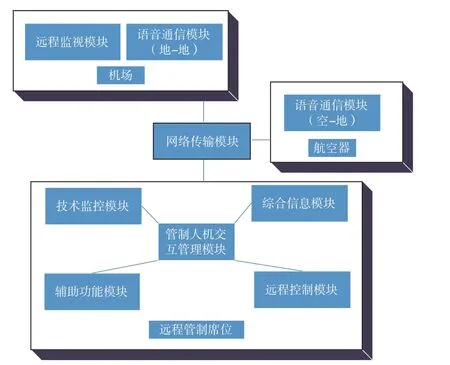
圖2 遠(yuǎn)程塔臺(tái)各功能模塊相互關(guān)系Fig.2 Relationship among function modules of remote tower
2.1.2 遠(yuǎn)程塔臺(tái)運(yùn)行模式
遠(yuǎn)程塔臺(tái)作為空中交通管制的范式轉(zhuǎn)換,國(guó)內(nèi)已經(jīng)開(kāi)始探索遠(yuǎn)程塔臺(tái)模式(見(jiàn)表3),參考?xì)W美國(guó)家遠(yuǎn)程塔臺(tái)運(yùn)行經(jīng)驗(yàn),根據(jù)提供遠(yuǎn)程塔臺(tái)服務(wù)的特征,遠(yuǎn)程塔臺(tái)運(yùn)行模式可分為:(1)I類(lèi)遠(yuǎn)程塔臺(tái)運(yùn)行模式:用遠(yuǎn)程塔臺(tái)替代傳統(tǒng)塔臺(tái),為航空器提供機(jī)場(chǎng)管制服務(wù)(部分機(jī)場(chǎng)含進(jìn)近管制服務(wù));(2)Ⅱ類(lèi)遠(yuǎn)程塔臺(tái)運(yùn)行模式:在某一遠(yuǎn)程塔臺(tái)單元為一個(gè)民用機(jī)場(chǎng)提供機(jī)坪管制服務(wù);(3)Ⅲ類(lèi)遠(yuǎn)程塔臺(tái)運(yùn)行模式:應(yīng)急遠(yuǎn)程塔臺(tái),即為應(yīng)對(duì)突發(fā)事件,在某一遠(yuǎn)程塔臺(tái)單元為一個(gè)民用機(jī)場(chǎng)提供機(jī)場(chǎng)管制服務(wù)(部分機(jī)場(chǎng)含進(jìn)近管制服務(wù))或機(jī)坪管制服務(wù),以防止機(jī)場(chǎng)管制服務(wù)(部分機(jī)場(chǎng)含進(jìn)近管制服務(wù))或機(jī)坪管制服務(wù)中斷或停止,作為原塔臺(tái)備份使用。目前,我國(guó)I類(lèi)、Ⅱ類(lèi)遠(yuǎn)程塔臺(tái)運(yùn)行模式均有試運(yùn)行試點(diǎn)。
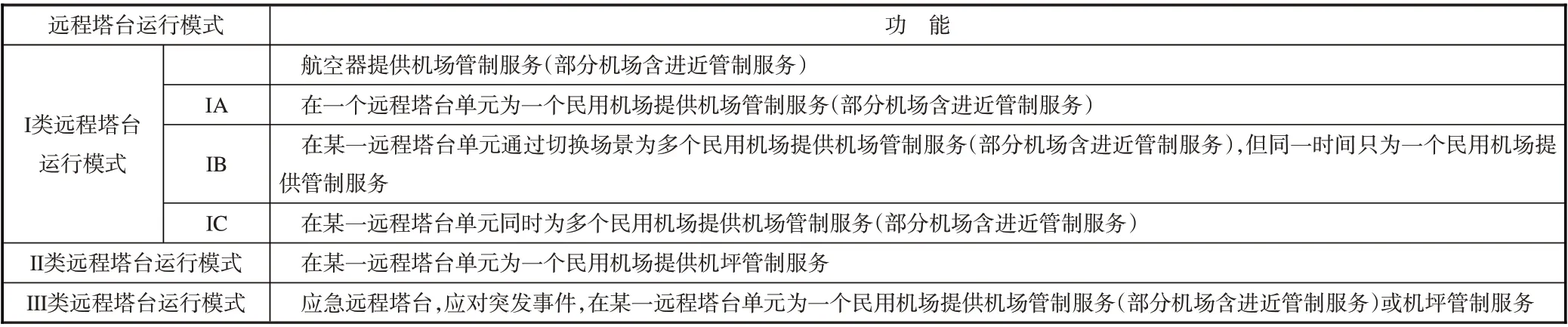
表3 我國(guó)遠(yuǎn)程塔臺(tái)運(yùn)行模式Table 3 Operation mode of remote tower in China
2.2 遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估指標(biāo)
指標(biāo)是評(píng)估方案的核心,經(jīng)過(guò)對(duì)國(guó)內(nèi)外文獻(xiàn)的梳理,現(xiàn)初步構(gòu)建遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估指標(biāo)體系如圖3 所示,其中包括一級(jí)指標(biāo)3 個(gè)、二級(jí)指標(biāo)15 個(gè)、三級(jí)指標(biāo)66 個(gè)。基于評(píng)估的角度不同,將遠(yuǎn)程塔臺(tái)評(píng)估指標(biāo)分為機(jī)場(chǎng)指標(biāo)、技術(shù)指標(biāo)及人因工效指標(biāo)三個(gè)一級(jí)指標(biāo)。其中,機(jī)場(chǎng)指標(biāo)是機(jī)場(chǎng)適配遠(yuǎn)程塔臺(tái)的最低要求,技術(shù)指標(biāo)是實(shí)現(xiàn)遠(yuǎn)程塔臺(tái)管制的技術(shù)最低要求,人因工效指標(biāo)是遠(yuǎn)程塔臺(tái)情景感知的評(píng)估標(biāo)準(zhǔn)。區(qū)別于傳統(tǒng)塔臺(tái)管制,遠(yuǎn)程塔臺(tái)管制是典型的“人機(jī)”交互作業(yè),人機(jī)交互中管制員差異化感知水平?jīng)Q定遠(yuǎn)程塔臺(tái)是否可以替代傳統(tǒng)塔臺(tái)進(jìn)行管制作業(yè)。因此,人因工效指標(biāo)是遠(yuǎn)程塔臺(tái)評(píng)估指標(biāo)中最關(guān)鍵的指標(biāo)集。
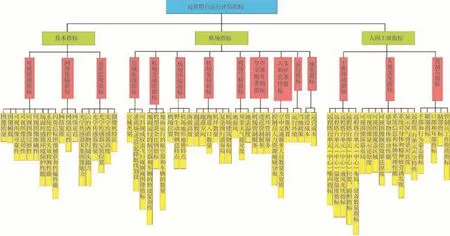
圖3 遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估指標(biāo)體系Fig.3 Remote tower operation evaluation index system
2.2.1 機(jī)場(chǎng)指標(biāo)
機(jī)場(chǎng)指標(biāo)決定著是否在該機(jī)場(chǎng)應(yīng)用遠(yuǎn)程塔臺(tái)技術(shù)以及適配的遠(yuǎn)程塔臺(tái)模式[48]。其中包括:(1)空域航線指標(biāo):包括空域類(lèi)別、進(jìn)離場(chǎng)/進(jìn)近/起降航線劃設(shè)、目視或儀表飛行規(guī)則等指標(biāo);(2)機(jī)場(chǎng)交通流指標(biāo):包括地面運(yùn)行的航空器和車(chē)輛的數(shù)量、軌跡復(fù)雜性及機(jī)型混雜比例指標(biāo);(3)機(jī)場(chǎng)環(huán)境指標(biāo):包括機(jī)場(chǎng)位置、海拔高度、機(jī)場(chǎng)地形地勢(shì)特點(diǎn)、野生動(dòng)物棲息特點(diǎn)等指標(biāo);(4)機(jī)場(chǎng)布局指標(biāo):包括跑道數(shù)量、跑道方向、跑道入口數(shù)量、機(jī)坪數(shù)量、復(fù)雜滑行道布局、機(jī)場(chǎng)建筑物布局;(5)機(jī)場(chǎng)氣候指標(biāo):包括地面風(fēng)、異常天氣能見(jiàn)度、地表溫度等指標(biāo);(6)空中交通服務(wù)類(lèi)別指標(biāo):包括機(jī)場(chǎng)管制服務(wù)、進(jìn)近管制服務(wù)、機(jī)坪管制服務(wù)等指標(biāo);(7)人文和社會(huì)條件指標(biāo):包括對(duì)管制員人力資源地域分布、機(jī)場(chǎng)空中交通服務(wù)人員數(shù)量和資質(zhì)、資源配置等的優(yōu)化指標(biāo);(8)成本指標(biāo):包括建設(shè)成本和運(yùn)營(yíng)成本指標(biāo);(9)運(yùn)行指標(biāo):包括運(yùn)行環(huán)境和當(dāng)?shù)卣叩取?/p>
2.2.2 技術(shù)指標(biāo)
技術(shù)指標(biāo)是確保遠(yuǎn)程塔臺(tái)運(yùn)行的關(guān)鍵指標(biāo)[49],其中包括:(1)可視圖像指標(biāo):包括圖像質(zhì)量、圖像幀數(shù)、可視圖像可靠性、可視圖像適用性、可視圖像完整性、可視圖像準(zhǔn)確性、場(chǎng)面?zhèn)鞲衅鳝h(huán)境保護(hù)性能、系統(tǒng)監(jiān)控及失效檢測(cè)性能、可視圖像在所有情況下捕獲和傳輸閃爍信標(biāo)圖像的能力。(2)網(wǎng)絡(luò)傳輸指標(biāo):網(wǎng)絡(luò)帶寬、網(wǎng)絡(luò)延遲、網(wǎng)絡(luò)穩(wěn)定性、可視圖像從采集到呈現(xiàn)的端到端延遲、環(huán)境音頻從采集到播放的端到端延遲、語(yǔ)音通信的端到端延遲。(3)遠(yuǎn)程監(jiān)視指標(biāo):光學(xué)傳感器采集圖像能力、云臺(tái)查看特定地點(diǎn)和物體的特寫(xiě)鏡頭能力、光學(xué)傳感器數(shù)量、光學(xué)傳感器安裝位置、光學(xué)傳感器高度、攝像機(jī)特性。
2.2.3 人因工效指標(biāo)
人因工效學(xué)(HFE)評(píng)估是指對(duì)已有的產(chǎn)品或系統(tǒng)展開(kāi)評(píng)估,常見(jiàn)的評(píng)估包括可視性、可達(dá)性、舒適性、疲勞、肌肉受力等指標(biāo),進(jìn)而指導(dǎo)當(dāng)前產(chǎn)品或系統(tǒng)進(jìn)行完善或指導(dǎo)未來(lái)產(chǎn)品或系統(tǒng)的開(kāi)發(fā)[50]。人因工效學(xué)是遠(yuǎn)程塔臺(tái)運(yùn)行的重要評(píng)估原則,為提升管制員情景意識(shí)感知能力,遠(yuǎn)程塔臺(tái)的技術(shù)系統(tǒng)和運(yùn)行環(huán)境設(shè)計(jì)必須符合人因工效學(xué)原理[51]。
(1)工作環(huán)境指標(biāo)
工作環(huán)境指標(biāo)包括:遠(yuǎn)程塔臺(tái)單元(中心)的噪聲、溫度、濕度、通風(fēng)、光線等工作環(huán)境條件;遠(yuǎn)程塔臺(tái)單元(中心)的位置、面積、布局、設(shè)備數(shù)量等指標(biāo)[52]。
(2)人機(jī)交互指標(biāo)
人機(jī)交互指標(biāo)包括:可視圖像屏幕布局,可視圖像相比現(xiàn)實(shí)的還原度,可視圖像覆蓋區(qū)域,可視圖像能否提供流暢、規(guī)律和操作上可接受的視覺(jué)效果(如呈現(xiàn)移動(dòng)、閃爍、旋轉(zhuǎn)物體),感知移動(dòng)物體的性能(加速、減速、方向變化),可視圖像能否支持管制員判斷目標(biāo)之間的距離,系統(tǒng)的信息和標(biāo)牌管理功能,人機(jī)交互界面的顯示效果(如顏色、亮度、對(duì)比度等),系統(tǒng)對(duì)身體和精神的疲勞誘發(fā)程度,全景視頻拼接效果,顯示屏與背景的對(duì)比度,顯示屏布置,遠(yuǎn)程塔臺(tái)單元的聲學(xué)特性。
(3)管制員指標(biāo)
管制員指標(biāo)包括:管制員指標(biāo)管制員在崗執(zhí)勤中需要使用腦部思考做預(yù)案、眼部監(jiān)視航空器動(dòng)態(tài)、口部發(fā)出管制指令、耳部聽(tīng)取機(jī)組通話、手部記錄填寫(xiě)進(jìn)程單等執(zhí)行管制運(yùn)行任務(wù),遠(yuǎn)程塔臺(tái)設(shè)計(jì)需要適應(yīng)管制員腦部、眼部、口部、耳部、手部人因工效學(xué)需求[53]。手部和行為姿態(tài)指標(biāo):人體動(dòng)作、關(guān)節(jié)角度、扭矩、時(shí)空行為、交互行為、呼吸頻率、皮電活動(dòng)、脈搏波[54];眼部指標(biāo):興趣區(qū)關(guān)聯(lián)注視時(shí)間(興趣區(qū)持續(xù)時(shí)間、次數(shù)、首次注視時(shí)間、總注視時(shí)間等)、興趣區(qū)關(guān)聯(lián)掃視時(shí)間(興趣區(qū)持續(xù)時(shí)間、次數(shù)、首次掃視時(shí)間、總掃視時(shí)間等)、瞳孔大小、眨眼次數(shù)、眼跳、眼瞼閉合度;口部和耳部指標(biāo):應(yīng)答反應(yīng)時(shí),語(yǔ)義識(shí)別:重復(fù)(repeat),語(yǔ)義識(shí)別:糾正(correct);腦部指標(biāo):α(阿爾法)、β(貝塔)、θ(西塔)、δ(德?tīng)査┎芰抗β首V密度時(shí)間譜,包括額葉(語(yǔ)言、軀體運(yùn)動(dòng))、頂葉(軀體感覺(jué))、顳葉(聽(tīng)覺(jué))、枕葉(視覺(jué));腦皮層氧合血紅蛋白(HbO)和脫氧血紅蛋白(HbR)。
管制員工作資質(zhì)指標(biāo)包括:管制員的年齡、身體健康情況、工齡、管制員級(jí)別、是否接受過(guò)遠(yuǎn)程塔臺(tái)管制培訓(xùn)等指標(biāo)。
3 展望與未來(lái)
遠(yuǎn)程塔臺(tái)是近年來(lái)國(guó)內(nèi)民航領(lǐng)域的研究熱點(diǎn),涉及傳感器技術(shù)、計(jì)算機(jī)科學(xué)、生理心理學(xué)、人因工效學(xué)等多門(mén)學(xué)科。遠(yuǎn)程塔臺(tái)運(yùn)營(yíng)的主要目標(biāo)是小型、低密度機(jī)場(chǎng)(通常是單次運(yùn)營(yíng),很少超過(guò)兩次同時(shí)運(yùn)行)和偶爾具有中等交通密度(超過(guò)兩次同時(shí)運(yùn)營(yíng))的季節(jié)性旅游機(jī)場(chǎng)。截至2021 年年底,我國(guó)境內(nèi)共有運(yùn)輸機(jī)場(chǎng)(不含香港、澳門(mén)和臺(tái)灣地區(qū))248個(gè),旅客吞吐量為90748.3萬(wàn)人次。其中,支線機(jī)場(chǎng)219個(gè),旅客吞吐量為26498.5萬(wàn)人次,僅占2021年全國(guó)旅客吞吐量的29.8%,這些支線機(jī)場(chǎng)目前的業(yè)務(wù)利潤(rùn)率較低,遠(yuǎn)程塔臺(tái)設(shè)施將產(chǎn)生較低的維護(hù)、人員配備和培訓(xùn)成本,并能夠長(zhǎng)期運(yùn)行,從而將機(jī)場(chǎng)收入損失降至最低,在我國(guó)擁有良好的應(yīng)用前景。盡管有良好的應(yīng)用前景,目前我國(guó)遠(yuǎn)程塔臺(tái)領(lǐng)域還存在大量人因工效指標(biāo)待驗(yàn)證、缺乏行業(yè)內(nèi)認(rèn)可度、缺乏合理的規(guī)章制度等不足。對(duì)此,在運(yùn)行模式、評(píng)估工作及規(guī)章制度方面有如下展望:
(1)在運(yùn)行模式方面,我國(guó)應(yīng)加速發(fā)展單機(jī)場(chǎng)遠(yuǎn)程塔臺(tái)運(yùn)行模式,累積遠(yuǎn)程空中管制經(jīng)驗(yàn);推廣大型機(jī)場(chǎng)遠(yuǎn)程塔臺(tái)機(jī)坪管制模式;積極開(kāi)展遠(yuǎn)程多機(jī)場(chǎng)管制試點(diǎn),增大遠(yuǎn)程塔臺(tái)應(yīng)用比例,探討遠(yuǎn)程塔臺(tái)在多個(gè)機(jī)場(chǎng)之間靈活管制的可能性,實(shí)現(xiàn)我國(guó)遠(yuǎn)程塔臺(tái)多種運(yùn)行模式的應(yīng)用。
(2)在評(píng)估方面,需要細(xì)化評(píng)估指標(biāo),開(kāi)展人因工效評(píng)估工作,用科學(xué)的模型確定遠(yuǎn)程塔臺(tái)運(yùn)行績(jī)效和安全績(jī)效相關(guān)數(shù)據(jù)與人因工效評(píng)估指標(biāo)的關(guān)聯(lián)性,建立符合我國(guó)遠(yuǎn)程塔臺(tái)運(yùn)行特征的評(píng)估指標(biāo)網(wǎng);結(jié)合定性定量多種方法對(duì)我國(guó)遠(yuǎn)程塔臺(tái)運(yùn)行綜合評(píng)估,得出遠(yuǎn)程塔臺(tái)的人—機(jī)—環(huán)境匹配程度及程序設(shè)計(jì)合理性,確保遠(yuǎn)程塔臺(tái)安全、高效的運(yùn)行。
(3)在規(guī)章制度發(fā)面,需要對(duì)原有管制流程進(jìn)行有目的性的任務(wù)切割,對(duì)監(jiān)視信息讀取與處理、地空通信接收與發(fā)送、電報(bào)處理及協(xié)調(diào)組織等主要管制業(yè)務(wù)進(jìn)行系統(tǒng)科學(xué)的分割,并將處理流程標(biāo)準(zhǔn)化,建立符合遠(yuǎn)程塔臺(tái)中心運(yùn)行特征及要求的管制任務(wù)標(biāo)準(zhǔn)化處理程序。
4 結(jié)束語(yǔ)
本文通過(guò)文獻(xiàn)梳理,對(duì)國(guó)內(nèi)外遠(yuǎn)程塔臺(tái)評(píng)估研究現(xiàn)狀進(jìn)行分析。結(jié)果表明,遠(yuǎn)程塔臺(tái)管制屬于典型的人機(jī)交互范疇,需要依據(jù)人因工效原理從情景感知和管制效率兩個(gè)方面進(jìn)行評(píng)估;對(duì)國(guó)內(nèi)外遠(yuǎn)程塔臺(tái)運(yùn)行研究發(fā)展現(xiàn)狀進(jìn)行了綜述與比較,發(fā)現(xiàn)我國(guó)遠(yuǎn)程塔臺(tái)距離國(guó)外成熟的應(yīng)用還有4~5年的距離;闡述了遠(yuǎn)程塔臺(tái)功能模塊以及運(yùn)行模式,根據(jù)國(guó)內(nèi)外研究和規(guī)章制度,提出遠(yuǎn)程塔臺(tái)運(yùn)行三級(jí)評(píng)估指標(biāo)體系。評(píng)估指標(biāo)與遠(yuǎn)程塔臺(tái)運(yùn)行績(jī)效和安全績(jī)效的關(guān)聯(lián)性有待深入探索與研究,因此下一步的研究是完善評(píng)估指標(biāo)體系,建立合理完善的評(píng)估指標(biāo)網(wǎng)絡(luò)和評(píng)估模型,推動(dòng)我國(guó)遠(yuǎn)程塔臺(tái)運(yùn)行評(píng)估工作。