基于 DMC-PID 雙環(huán)控制的提升機(jī)恒減速制動(dòng)系統(tǒng)研究
2022-11-28 09:05:18李福勇齊學(xué)海安傳棟
礦山機(jī)械 2022年11期
李福勇,齊學(xué)海,安傳棟
山東能源新礦集團(tuán)公司 山東泰安 271219
制 動(dòng)系統(tǒng)的高可靠性是保證提升機(jī)安全運(yùn)行的關(guān)鍵[1]。提升機(jī)制動(dòng)系統(tǒng)安全制動(dòng)方式主要有兩種[2]:恒力矩制動(dòng)和恒減速制動(dòng)。由于恒力矩制動(dòng)過(guò)程中制動(dòng)力不變,提升系統(tǒng)容易在制動(dòng)力矩過(guò)大時(shí)受到較大沖擊,導(dǎo)致斷繩、墜籠等事故。相較于恒力矩制動(dòng),恒減速制動(dòng)過(guò)程更加安全平穩(wěn),但相應(yīng)地,礦山企業(yè)對(duì)其控制系統(tǒng)也有著更高的要求[3]。
國(guó)外研制提升機(jī)制動(dòng)系統(tǒng)的廠商主要有瑞典 ABB和德國(guó) SIEMAG。近年來(lái),國(guó)內(nèi)學(xué)者針對(duì)提升機(jī)制動(dòng)系統(tǒng)的調(diào)速及制動(dòng)性能進(jìn)行了大量研究[4]。葛明臣等人[5]用滑模控制器代替調(diào)速系統(tǒng)轉(zhuǎn)速調(diào)節(jié)器,有效改善了傳統(tǒng)煤礦提升機(jī)調(diào)速系統(tǒng)響應(yīng)速度慢、超調(diào)大且抖振大的問(wèn)題。張燁[6]針對(duì)傳統(tǒng) PID 控制無(wú)法兼顧負(fù)載多變、效率低且高故障率的礦井提升機(jī)調(diào)速系統(tǒng)的快速性和穩(wěn)定性問(wèn)題,提出了神經(jīng)網(wǎng)絡(luò) BP-PID 控制算法來(lái)提高其調(diào)速系統(tǒng)的工作效率和性能,利用 BP網(wǎng)絡(luò)的自學(xué)習(xí),實(shí)現(xiàn)傳統(tǒng) PID 控制參數(shù)的調(diào)整。王利棟等人[7]針對(duì)提升機(jī)恒減速制動(dòng)系統(tǒng)超調(diào)量較大的問(wèn)題,提出了一種將模糊 PID 控制與 BP 神經(jīng)網(wǎng)絡(luò)相融合的提升機(jī)恒減速度控制方法。
目前國(guó)內(nèi)在恒減速制動(dòng)控制的研究上,控制策略多以傳統(tǒng)的 PID 控制方式為主。由于提升機(jī)運(yùn)行工況復(fù)雜,在運(yùn)行過(guò)程中有許多變化的因素,因而難以建立精確的傳遞函數(shù),以保證響應(yīng)速度和穩(wěn)態(tài)誤差。本文提出了一種結(jié)合 DMC 與 PID 雙環(huán)控制制動(dòng)過(guò)程減速度的控制方法,并對(duì)控制器進(jìn)行參數(shù)整定,以提高恒減速系統(tǒng)的響應(yīng)速度和控制精度。
1 恒減速制動(dòng)過(guò)程模型的建立
恒減速制動(dòng)控制是一個(gè)自動(dòng)控制過(guò)程,筆者針對(duì)制動(dòng)系統(tǒng)建立數(shù)學(xué)模型,并在此基礎(chǔ)上設(shè)計(jì)了恒減速控制系統(tǒng)。
1.1 數(shù)學(xué)模型
恒減速制動(dòng)系統(tǒng)由恒減速制動(dòng)液壓通道和恒減速制動(dòng)機(jī)械結(jié)構(gòu) 2 個(gè)模塊組成,如圖 1 所示。

圖1 恒減速制動(dòng)系統(tǒng)的組成Fig.1 Constitution of constant deceleration braking system
比例方向閥接收來(lái)自放大電路的控制信號(hào),以改變液壓回路通道,使大小相異的壓力油流入盤形制動(dòng)器;壓力油與滾筒兩端被施加的正壓力相對(duì)應(yīng);利用大小不同的正壓力控制滾筒運(yùn)行的減速度。
放大電路主要對(duì)控制信號(hào)進(jìn)行放大,以驅(qū)動(dòng)比例方向閥動(dòng)作。可以將驅(qū)動(dòng)電路對(duì)控制信號(hào)的調(diào)理看作比例控制環(huán)節(jié),即

式中:us為經(jīng)放大電路放大后作用在比例換向閥兩端的信號(hào);ki為放大電路的放大倍數(shù);ui為從控制器發(fā)出的信號(hào)。
比例方向閥開(kāi)口大小由其兩端控制信號(hào)控制。閥口開(kāi)度xs與控制信號(hào)也可近似看作比例控制環(huán)節(jié),即
式中:xs(t) 為比例方向閥的開(kāi)度,其值可取正負(fù),當(dāng)取值為負(fù)時(shí),表示負(fù)開(kāi)口,此時(shí)盤形制動(dòng)器處于泄壓狀態(tài);ks為比例環(huán)節(jié)的比例系數(shù)。
通過(guò)調(diào)整比例方向閥的開(kāi)度,控制制動(dòng)系統(tǒng)的油壓。當(dāng)xs為正時(shí),對(duì)制動(dòng)器進(jìn)行充壓,即

式中:q1為自比例方向閥流出后進(jìn)入制動(dòng)器內(nèi)的液壓油流量;Cd為流量系數(shù);D為閥芯臺(tái)肩直徑;Δp1為充壓過(guò)程中方向閥閥口兩端的壓差;ρ為液壓油密度。
同理,在制動(dòng)器泄壓過(guò)程中,有
式中:q2為從制動(dòng)器流出的液壓油流量,與充壓過(guò)程中不同的是,其值為負(fù);Δp2為泄壓過(guò)程中流經(jīng)閥口的壓差。
盤形制動(dòng)器內(nèi)部的可壓縮流體連續(xù)方程為
式中:∑qi為流入制動(dòng)器腔體內(nèi)液壓油流量總和;∑qo為其流出流量總和;V為制動(dòng)器腔體體積;Be為液體體積彈性模量。
忽略泄漏的影響,則有:
為方便后續(xù)分析,做以下兩點(diǎn)假設(shè)。
(1) 在恒減速制動(dòng)過(guò)程中,制動(dòng)盤緊貼盤形制動(dòng)器,液壓缸與活塞之間相對(duì)位移為零,因而假設(shè)液壓缸內(nèi)部體積不變。
(2) 比例方向閥在恒減速制動(dòng)過(guò)程中會(huì)不斷根據(jù)反饋信號(hào)調(diào)節(jié)開(kāi)口大小,使油壓始終在工作點(diǎn)附近呈較小幅度的微調(diào),故閥口兩端的壓差 Δp1與 Δp2可近似看作常數(shù)。記作
分別可得:
充壓過(guò)程中,
泄壓過(guò)程中,
由此可知,可將恒減速制動(dòng)控制回路視為積分環(huán)節(jié)。假設(shè)閥口兩側(cè)的壓差 Δp1和 Δp2相等,則在充壓和泄壓兩狀態(tài)下,kp1=kp2=kp,可將p(t) 合為一個(gè)公式表達(dá),即
在實(shí)際工作過(guò)程中,液壓通道的輸出響應(yīng)存在一定延遲,將此延時(shí)特性看作恒減速通道的純遲延,用τ表示,則
在工作點(diǎn)附近,可將由滾筒和盤形制動(dòng)器組成的機(jī)械結(jié)構(gòu)看作線性定常過(guò)程。故可用二階慣性環(huán)節(jié)描述此機(jī)械結(jié)構(gòu),即

1.2 參數(shù)辨識(shí)
為了方便辨識(shí)過(guò)程模型中的參數(shù),將油壓控制的3 個(gè)環(huán)節(jié)合并為比例積分加純遲延環(huán)節(jié),其傳遞函數(shù)為
式中:P(s) 為拉氏變換后的p(t);U(s) 為拉氏變換后的u(t)。
機(jī)械結(jié)構(gòu)的傳遞函數(shù)為
式中:A(s) 為拉氏變換后的a(t)。
上述數(shù)學(xué)模型為恒減速制動(dòng)過(guò)程中的連續(xù)時(shí)間模型,其中a、b、c1、c2、τ為待辨識(shí)參數(shù)。根據(jù)采樣定理,在對(duì)連續(xù)時(shí)間模型進(jìn)行采樣時(shí),設(shè)定采樣頻率為10 倍的比例閥最高工作頻率,即采樣頻率ωs=1 000 Hz。
將系統(tǒng)延遲記作d,離散后轉(zhuǎn)化為差分方程形式

為了辨識(shí)恒減速制動(dòng)過(guò)程數(shù)學(xué)模型中的參數(shù),搭建試驗(yàn)平臺(tái),采集液壓制動(dòng)系統(tǒng)的油壓和速度數(shù)據(jù)。本文中的數(shù)據(jù)來(lái)自新礦集團(tuán)某礦,包括重載提升和下放兩種工況的數(shù)據(jù)。將其中接近階躍響應(yīng)的原始數(shù)據(jù)導(dǎo)入 MATLAB 軟件,并對(duì)采集數(shù)據(jù)進(jìn)行歸零化和中值濾波處理,結(jié)果如圖 2~ 4 所示。
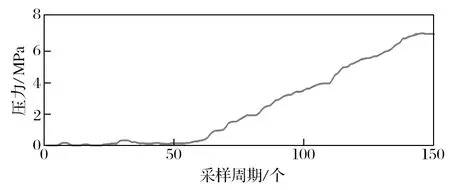
圖2 減速液壓通道的壓力響應(yīng)曲線Fig.2 Pressure response curve of constant deceleration hydraulic passage
在減速度和壓力響應(yīng)試驗(yàn)中,階躍信號(hào)分別作為油壓變化量和比例閥的控制電壓信號(hào)變化量給入系統(tǒng)。利用遞推最小二乘法對(duì)模型參數(shù)進(jìn)行辨識(shí),辨識(shí)結(jié)果如圖 5~ 7 所示。模型中未知參數(shù)的辨識(shí)結(jié)果如表 1 所列。
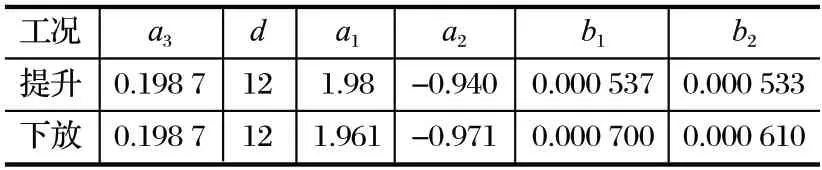
表1 未知參數(shù)的辨識(shí)結(jié)果Tab.1 Identification results of unknown parameters
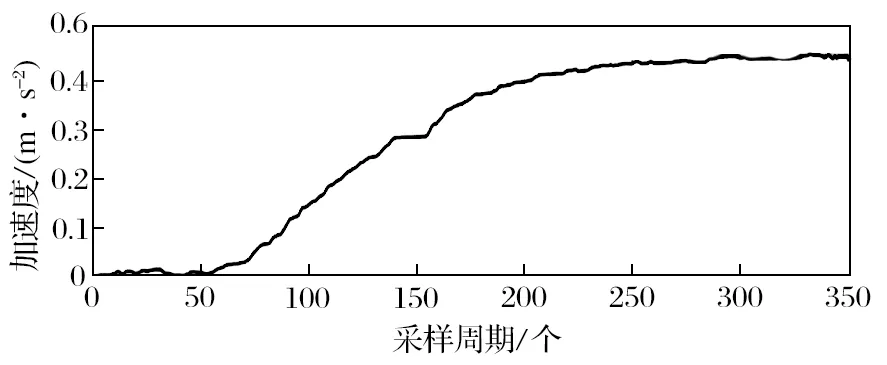
圖3 重載提升工況下制動(dòng)減速度響應(yīng)曲線Fig.3 Braking deceleration response curve in heavy-load hoisting mode
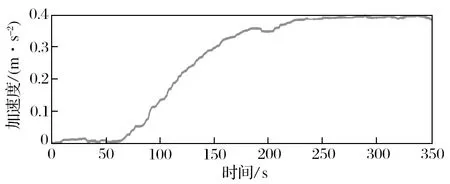
圖4 重載下放工況下制動(dòng)減速度響應(yīng)曲線Fig.4 Braking deceleration response curve in heavy-load lowering mode
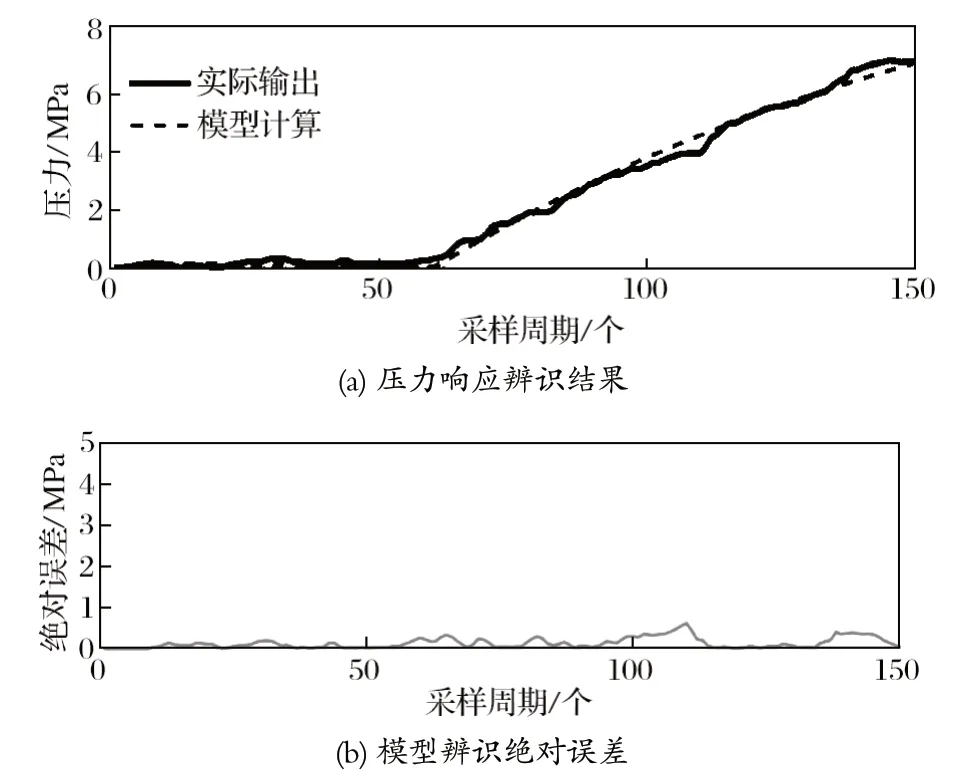
圖5 恒減速液壓通道辨識(shí)結(jié)果Fig.5 Identification results of constant deceleration hydraulic passage
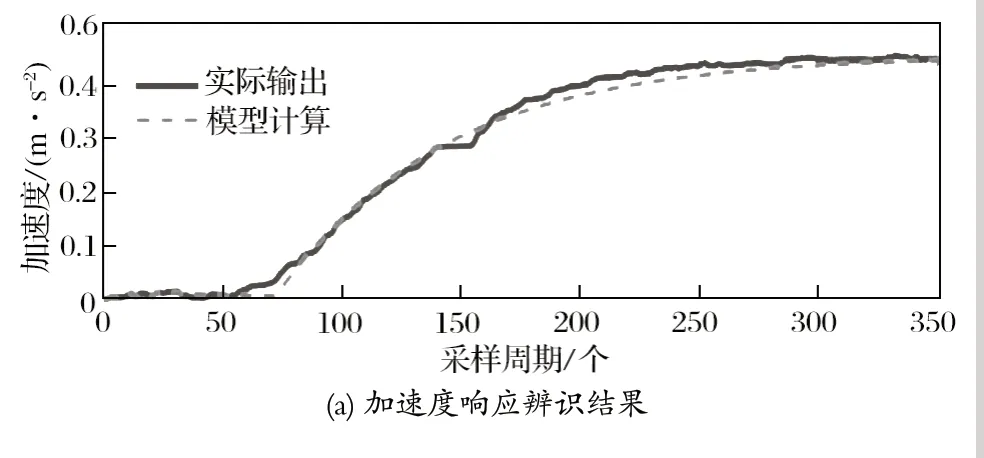

圖6 重載提升工況下恒減速制動(dòng)辨識(shí)結(jié)果Fig.6 Identification results of constant deceleration braking in heavy-load hoisting mode
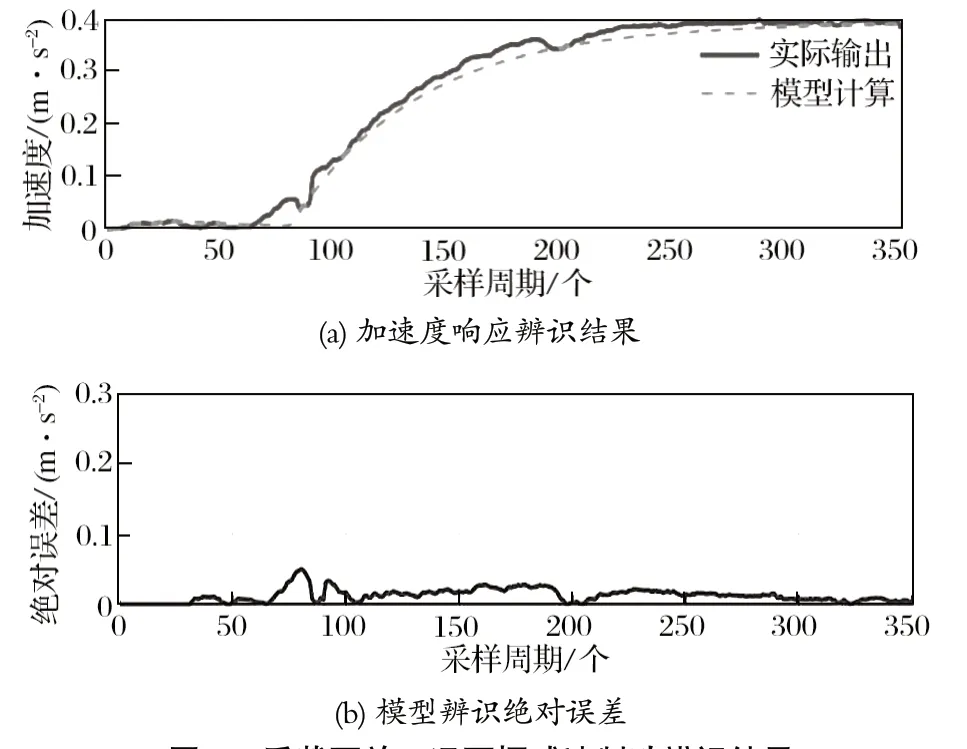
圖7 重載下放工況下恒減速制動(dòng)辨識(shí)結(jié)果Fig.7 Identification results of constant deceleration braking in heavy-load lowering mode
2 恒減速制動(dòng)過(guò)程控制方法的研究
2.1 控制方案設(shè)計(jì)
比例方向閥作為流量控制元件,無(wú)法直接改變油壓,在控制環(huán)節(jié)中為非漸穩(wěn)對(duì)象。基于此,結(jié)合 PID和 DMC 控制策略,設(shè)計(jì)了恒減速制動(dòng)雙環(huán)控制回路。外環(huán)主要元件是速度傳感器和 DMC 控制器;內(nèi)環(huán)主要由油壓傳感器、比例閥和 PID 控制器組成,如圖 8 所示。
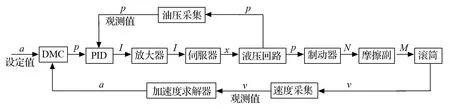
圖8 恒減速制動(dòng)過(guò)程控制方案Fig.8 Control scheme of constant deceleration braking process
2.2 DMC 控制器的設(shè)計(jì)
動(dòng)態(tài)矩陣預(yù)測(cè)控制算法由控制、預(yù)測(cè)和校正 3 個(gè)部分組成,如圖 9 所示,細(xì)箭頭代表純量流,粗箭頭代表向量流。
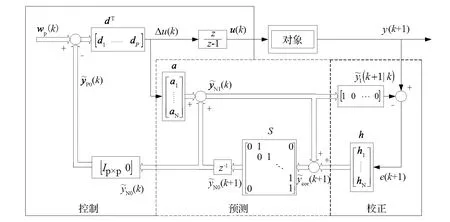
圖9 動(dòng)態(tài)矩陣控制算法的原理框圖Fig.9 Block diagram of principle of dynamic matrix control algorithm
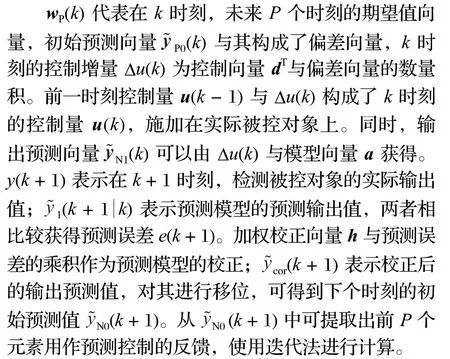
DMC 算法的三組重要參數(shù)可通過(guò)以下方法獲得:
(1) 由制動(dòng)系統(tǒng)的單位階躍響應(yīng)可確定模型向量{ai},本文辨識(shí)的模型建模時(shí)域?yàn)镹;
(2) 通過(guò)計(jì)算可得出控制向量 {di},Q、R、M、P是優(yōu)化策略的反應(yīng)參數(shù),其值可通過(guò)仿真整定;
(3) 本研究選擇單位向量作為校正向量 {hi}。
2.3 DMC-PID 雙環(huán)控制仿真分析
為驗(yàn)證 DMC-PID 雙環(huán)控制策略的優(yōu)越性,在Simulation 中分別搭建了傳統(tǒng) PID 控制和 DMC-PID雙環(huán)控制下的恒減速制動(dòng)系統(tǒng),并針對(duì)提升和下放兩種工況下的減速度響應(yīng)曲線進(jìn)行對(duì)比分析。
2.3.1 傳統(tǒng) PID 控制
本研究的制動(dòng)策略應(yīng)用在傾角θ為 6°的斜井提升系統(tǒng)中。根據(jù)《煤礦安全規(guī)程》規(guī)定進(jìn)行計(jì)算,當(dāng)傾角θ為 6°時(shí),提升減速度不能大于 1.47 m/s2,下放減速度不能小于 0.75 m/s2,因而仿真時(shí)將減速度設(shè)置為 1.00 m/s2。傳統(tǒng) PID 控制仿真參數(shù)如表 2 所列,仿真結(jié)果如圖 10、11 所示。
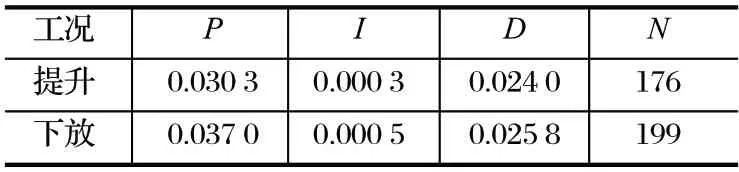
表2 傳統(tǒng) PID 控制參數(shù)Tab.2 Parameters of traditional PID control
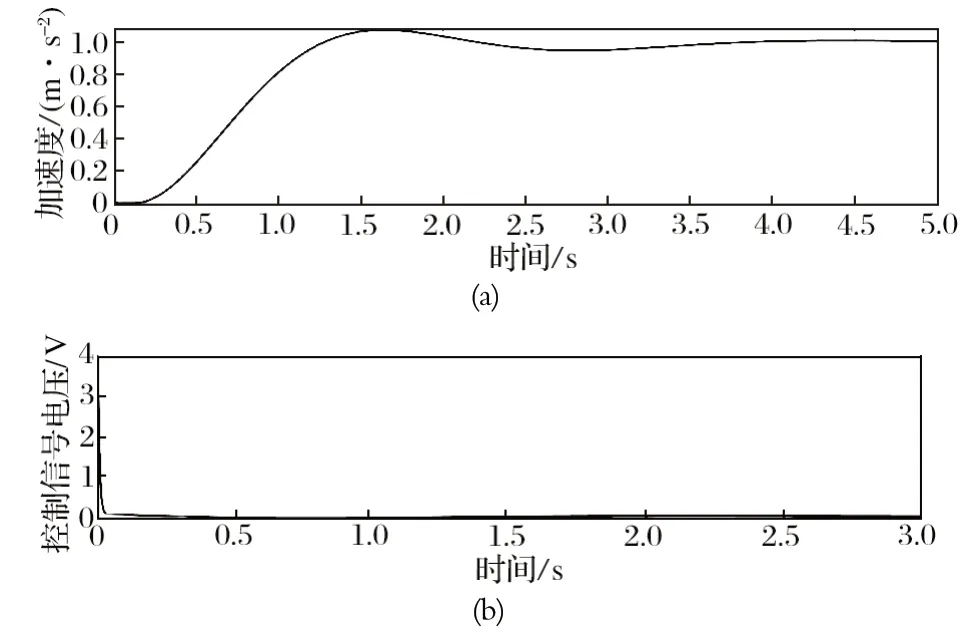
圖10 提升工況下傳統(tǒng) PID 控制仿真結(jié)果Fig.10 Simulation results of traditional PID control in hoisting mode
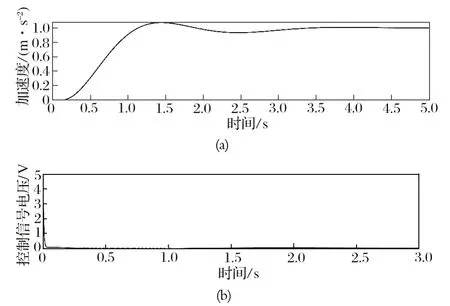
圖11 下放工況下傳統(tǒng) PID 控制仿真結(jié)果Fig.11 Simulation results of traditional PID control in lowering mode
由圖 10、11 可知:傳統(tǒng) PID 控制可以實(shí)現(xiàn)在兩種工況下制動(dòng)過(guò)程的減速度穩(wěn)定,但減速度曲線存在波動(dòng);當(dāng)設(shè)置預(yù)期減速度值為 1.00 m/s2時(shí),提升和下放兩種工況下減速度穩(wěn)定所需時(shí)長(zhǎng)分別為 3.71 和3.47 s。
2.3.2 DMC-PID 雙環(huán)控制
在 DMC-PID 雙環(huán)控制策略下,仿真所需參數(shù)如表 3 所列。提升和下放兩工況下,仿真結(jié)果分別如圖12、13 所示。
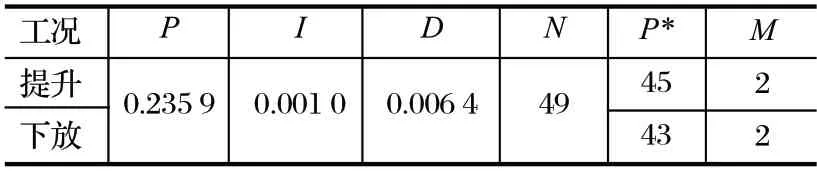
表3 DMC-PID 雙環(huán)控制參數(shù)Tab.3 Parameters of DMC-PID dorble-loop control
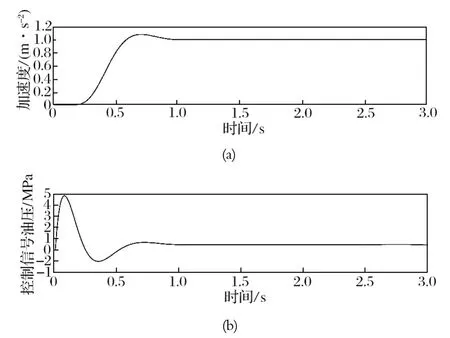
圖12 提升工況 DMC-PID 雙環(huán)控制仿真結(jié)果Fig.12 Simulation results of DMC-PID double-loop control in hoisting mode
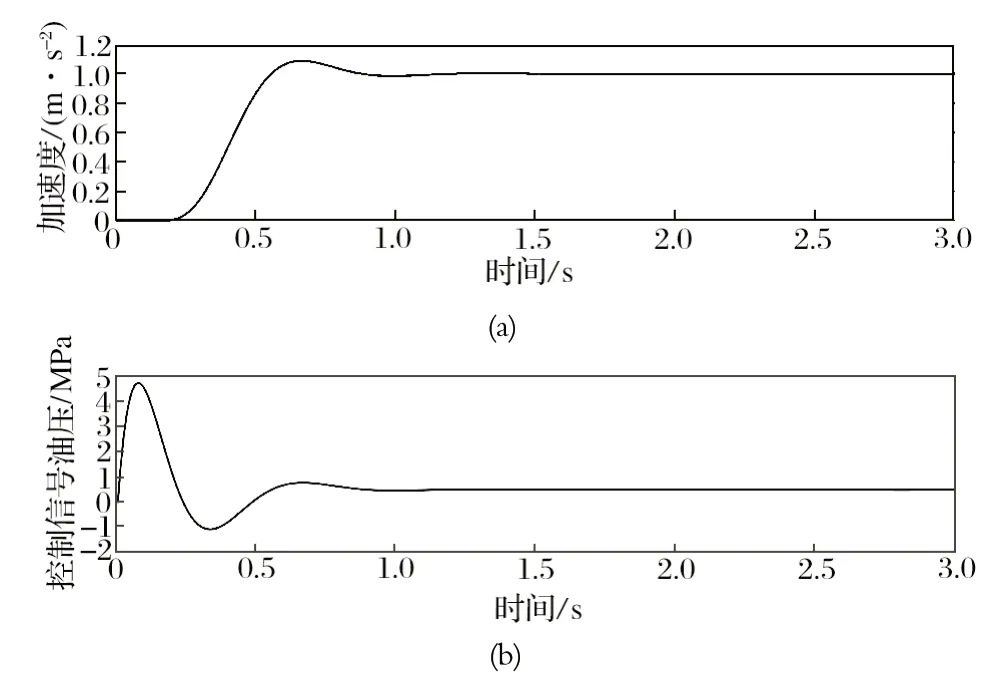
圖13 下放工況 DMC-PID 雙環(huán)控制仿真結(jié)果Fig.13 Simulation results of DMC-PID double-loop control in lowering mode
由圖 12、13 可知:采用 DMC-PID 雙環(huán)控制策略,提升和下放過(guò)程中的減速度分別在 0.81 和 0.77 s時(shí)后穩(wěn)定在了 1.00 m/s2,并在此后波動(dòng)幅度始終小于5%。
傳統(tǒng) PID 控制與 DMC-PID 雙環(huán)控制的性能對(duì)比如表 4 所列。

表4 兩種控制策略的性能對(duì)比Tab.4 Comparison of two kinds of control strategy in performance
由表 4 可知,在提升機(jī)恒減速制動(dòng)過(guò)程中,相較于傳統(tǒng) PID 控制,采用 DMC-PID 雙環(huán)控制策略,減速度控制更加平穩(wěn),響應(yīng)更加迅速。
3 結(jié)語(yǔ)
針對(duì)現(xiàn)階段礦山提升制動(dòng)系統(tǒng)無(wú)法較好滿足變載荷、高速重載、控制對(duì)象不確定等問(wèn)題,提出了基于 DMC 動(dòng)態(tài)矩陣與 PID 控制結(jié)合的控制方案,并在Simulation 中分別搭建了傳統(tǒng) PID 控制和 DMC-PID雙環(huán)控制下的恒減速制動(dòng)系統(tǒng),針對(duì)提升和下放兩種工況下的減速度響應(yīng)曲線進(jìn)行仿真分析。結(jié)果表明:相較于傳統(tǒng) PID 控制,DMC-PID 雙環(huán)控制可得到更好的控制效果。這為進(jìn)一步研究并提高提升機(jī)恒減速制動(dòng)控制系統(tǒng)的性能提供了參考。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
