一種載人電動(dòng)飛機(jī)永磁同步電機(jī)的在線辨識(shí)滑模控制方法*
2022-11-26 02:23:56張慶新龐濟(jì)寶王書禮
電機(jī)與控制應(yīng)用 2022年11期
張慶新,龐濟(jì)寶,王書禮
(1.遼寧通用航空研究院,遼寧 沈陽 110000; 2.沈陽航空航天大學(xué) 自動(dòng)化學(xué)院,遼寧 沈陽 110000)
0 引 言
永磁同步電機(jī)(PMSM)具有效率高、體積小、響應(yīng)快的優(yōu)點(diǎn),廣泛應(yīng)用于新能源汽車、航空航天等領(lǐng)域。與新能源汽車相比,電動(dòng)飛機(jī)在運(yùn)行過程中需要更高的控制精度。目前我國(guó)載人電動(dòng)飛機(jī)主推控制器設(shè)計(jì)仍處于起步階段,大部分通過矢量PI控制方法對(duì)誤差的調(diào)節(jié)實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速的控制[1-3],但面對(duì)參數(shù)攝動(dòng)、負(fù)載突變、轉(zhuǎn)動(dòng)慣量改變等問題,仍然會(huì)出現(xiàn)電機(jī)轉(zhuǎn)速超調(diào)和振蕩等負(fù)面情況,無法滿足精度要求。
針對(duì)PMSM的閉環(huán)控制策略,近些年提出了諸多控制方法[4-6],如自適應(yīng)控制(SMC)、滑模控制、模糊控制等方法在電機(jī)控制領(lǐng)域中得到了廣泛的應(yīng)用。文獻(xiàn)[7]提出了快速非奇異終端滑模與變指數(shù)趨近轉(zhuǎn)速控制相結(jié)合的方法,通過該方法使系統(tǒng)的魯棒性得到較大地提升并減弱了滑模抖振。文獻(xiàn)[8]提出了一種改進(jìn)冪指數(shù)SMC方法,可提升系統(tǒng)在外部擾動(dòng)下的動(dòng)靜態(tài)性能。文獻(xiàn)[9]對(duì)快速冪次趨近率的SMC展開研究,有效地提高了系統(tǒng)的響應(yīng)速度。在參數(shù)辨識(shí)方面,有卡爾曼濾波法、神經(jīng)網(wǎng)絡(luò)算法、優(yōu)化算法及最小二乘法[10-12]。文獻(xiàn)[13]設(shè)計(jì)了一款基于遞推最小二乘法的觀測(cè)器,對(duì)系統(tǒng)參數(shù)的變化進(jìn)行觀測(cè)補(bǔ)償并保持最優(yōu)的階躍位置響應(yīng)性能。文獻(xiàn)[14]針對(duì)最小二乘法收斂速度慢的問題提出逐步二次擬合搜索法,提升了收斂速度。文獻(xiàn)[15]提出了一種模糊遺忘因子最小二乘法,該方法解決了穩(wěn)定性與收斂速度之間的矛盾問題。
上述PMSM控制策略均提升了控制精度和抗擾能力,但在載人電動(dòng)飛機(jī)領(lǐng)域鮮有應(yīng)用。載人電動(dòng)飛機(jī)在巡航過程中會(huì)遇到自身速度調(diào)節(jié)和外界橫向突風(fēng)帶來的轉(zhuǎn)動(dòng)慣量攝動(dòng),造成PMSM控制器的參數(shù)變化,使飛機(jī)轉(zhuǎn)速響應(yīng)產(chǎn)生波動(dòng)。為保證電動(dòng)飛機(jī)的運(yùn)行安全,本文提出一種自適應(yīng)權(quán)重遞推最小二乘法,并通過在線辨識(shí)轉(zhuǎn)動(dòng)慣量的龍貝格負(fù)載觀測(cè)器對(duì)擾動(dòng)損耗進(jìn)行估算補(bǔ)償,將估算轉(zhuǎn)矩補(bǔ)償及辨識(shí)的轉(zhuǎn)動(dòng)慣量輸入滑模轉(zhuǎn)速控制器中,提升系統(tǒng)整體的抗擾能力。在滑模速度控制器方面,采用一種引入滑模平面的新型趨近率方法,在降低滑模抖振的同時(shí)提升系統(tǒng)的響應(yīng)速度。在仿真方面,模擬載人電動(dòng)飛機(jī)在巡航過程中加減速和偶遇突風(fēng)的情況,通過對(duì)比在本文設(shè)計(jì)控制器、傳統(tǒng)SMC、PI控制器的轉(zhuǎn)速響應(yīng)曲線,驗(yàn)證本文所提方法的有效性與可行性。
1 PMSM的數(shù)學(xué)模型
本文以表貼式PMSM為被控對(duì)象,在dq軸坐標(biāo)系中建立數(shù)學(xué)模型:
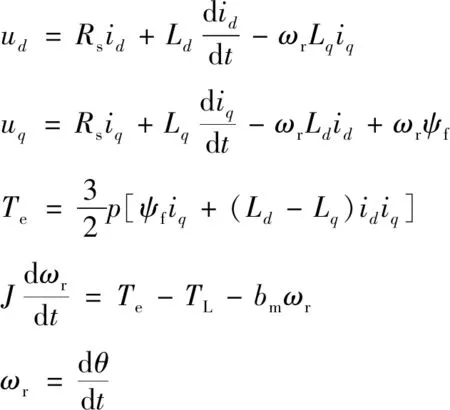
(1)
式中:ud、uq為d、q軸電壓;Rs為定子電樞電阻;id、iq為d、q軸電流;Ld、Lq為d、q軸電感;ωr為電機(jī)轉(zhuǎn)速;ψf為永磁體勵(lì)磁磁鏈;Te為電磁轉(zhuǎn)矩;p為電機(jī)極對(duì)數(shù);TL為負(fù)載轉(zhuǎn)矩;bm為黏滯摩擦系數(shù);J為轉(zhuǎn)動(dòng)慣量。
對(duì)于表貼式PMSM存在Ld=Lq,所以在dq坐標(biāo)系下轉(zhuǎn)矩方程可轉(zhuǎn)化為
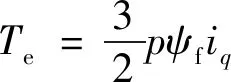
(2)
2 基于轉(zhuǎn)動(dòng)慣量在線辨識(shí)的擾動(dòng)觀測(cè)器
在載人電動(dòng)飛機(jī)巡航過程中,會(huì)遇到自身轉(zhuǎn)速調(diào)節(jié)與橫向突風(fēng)的情況,導(dǎo)致螺旋槳負(fù)載與轉(zhuǎn)動(dòng)慣量產(chǎn)生變化,為避免因轉(zhuǎn)動(dòng)慣量的改變引起系統(tǒng)調(diào)節(jié)時(shí)間增加,使轉(zhuǎn)速產(chǎn)生波動(dòng)。本文提出一種自適應(yīng)權(quán)重遞推最小二乘辨識(shí)的方法,該方法通過估計(jì)值和實(shí)際值的位置調(diào)整權(quán)重值,使其在遠(yuǎn)端實(shí)現(xiàn)全局搜索,近端提升收斂速度,最終實(shí)現(xiàn)轉(zhuǎn)動(dòng)慣量辨識(shí)。
2.1 傳統(tǒng)遺忘因子最小二乘法辨識(shí)
結(jié)合PMSM的數(shù)學(xué)模型,對(duì)PMSM的機(jī)械運(yùn)動(dòng)方程進(jìn)行拉式變換:
Te(s)-TL(s)=bmωr(s)+Jsωr(s)
(3)
定義系統(tǒng)輸出y(s)=ωr(s),系統(tǒng)輸入u(s)=Te(s)-TL(s),得到系統(tǒng)的傳遞函數(shù)為
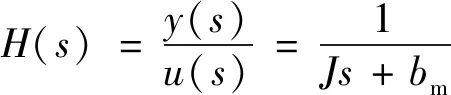
(4)
加入零階保持器環(huán)節(jié)后對(duì)PMSM運(yùn)動(dòng)方程進(jìn)行離散化,得到表達(dá)式:

(5)

y(k)=φT(k)·θ
(6)
通過引入遺忘因子,提升性能,辨識(shí)表達(dá)式為
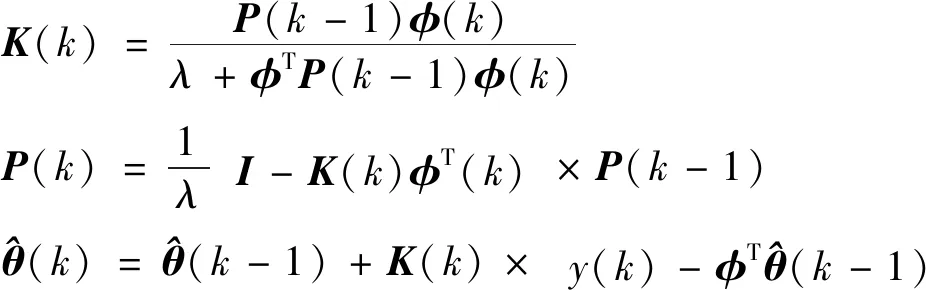
(7)
式中:λ為遺忘因子,取值范圍為0.9≤λ≤1,K(k)為三維列向量,P(k)為3×3階協(xié)方差矩陣。
2.2 自適應(yīng)權(quán)重最小二乘法辨識(shí)
傳統(tǒng)遺忘因子最小乘法通過削弱多次迭代后的矩陣元素提升收斂速度,但固定值迭代會(huì)導(dǎo)致搜索空間受限,影響最優(yōu)解[16]。本文提出自適應(yīng)權(quán)重最小二乘法辨識(shí),通過設(shè)置誤差自適應(yīng)函數(shù)調(diào)節(jié)權(quán)重的大小,根據(jù)估計(jì)值與真實(shí)值不同的距離實(shí)現(xiàn)動(dòng)態(tài)調(diào)節(jié)。步驟如下:
步驟1。讀取當(dāng)前時(shí)刻電磁轉(zhuǎn)矩與負(fù)載轉(zhuǎn)矩電機(jī)轉(zhuǎn)速進(jìn)行離散化處理,并設(shè)適應(yīng)度函數(shù)f:

(8)
步驟2。根據(jù)式(7)進(jìn)行迭代運(yùn)算,同時(shí)根據(jù)式(9)更新當(dāng)代權(quán)重wi:
(9)
式中:wmin和wmax分別為最小和最大權(quán)重系數(shù);favg為平均適應(yīng)度;fmin為當(dāng)代最小適應(yīng)度。
步驟3。重復(fù)上述步驟,當(dāng)估算值逼近實(shí)際值時(shí)終止運(yùn)算,辨識(shí)出轉(zhuǎn)動(dòng)慣量J。
參數(shù)辨識(shí)流程圖如圖1所示。
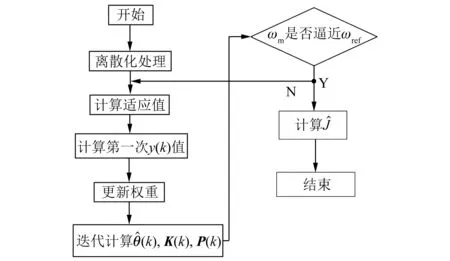
圖1 轉(zhuǎn)動(dòng)慣量辨識(shí)流程圖

將TL與ωr負(fù)載轉(zhuǎn)矩設(shè)為系統(tǒng)的狀態(tài)變量,得到龍貝格觀測(cè)系統(tǒng)的狀態(tài)方程:

(11)
通過配置系統(tǒng)矩陣A-LC的負(fù)實(shí)部特征根,使觀測(cè)器收斂可觀,定義特征方程為

(12)
假設(shè)特征值λ取值為α1、α2,聯(lián)立式(11),則可得:
(13)
式中:α1<0,α2<0。
通過配置α1和α2來提升觀測(cè)值逼近實(shí)際值的速度。
3 PMSM滑模SMC
3.1 新型趨近率的滑模控制
SMC是一種非線性控制方法,比PI控制具有更強(qiáng)的魯棒性[17]。首先設(shè)定角度與電機(jī)實(shí)際轉(zhuǎn)角的差值定義為系統(tǒng)的狀態(tài)變量,如下:
(14)
式中:ωref為電機(jī)給定轉(zhuǎn)速。
(15)
將滑模面設(shè)計(jì)為

(16)
為了保證系統(tǒng)在滑模面進(jìn)行往復(fù)運(yùn)動(dòng),傳統(tǒng)SMC采用指數(shù)趨近率的方法:

(17)
式中:ε為切換增益;k為指數(shù)增益。
在滑動(dòng)過程中,由指數(shù)項(xiàng)與等速項(xiàng)共同控制系統(tǒng)的運(yùn)動(dòng)狀態(tài)。指數(shù)項(xiàng)保證了系統(tǒng)向滑模面的趨近速度,等速項(xiàng)保證當(dāng)系統(tǒng)的趨近運(yùn)動(dòng)速度為0時(shí)系統(tǒng)可以滑動(dòng)到平衡點(diǎn)。但該種運(yùn)動(dòng)方式趨近速度緩慢,并在滑模面往復(fù)運(yùn)動(dòng)時(shí)會(huì)產(chǎn)生抖振,影響控制精度。為了保證系統(tǒng)具有較快趨近速度的同時(shí)減小抖動(dòng),應(yīng)使遠(yuǎn)點(diǎn)的趨近速度盡可能增大,縮短響應(yīng)時(shí)間,在近點(diǎn)的滑動(dòng)速度盡可能減小,降低抖振。針對(duì)這一原理,對(duì)傳統(tǒng)指數(shù)趨近率進(jìn)一步改進(jìn),將滑模面s引入到趨近率中實(shí)現(xiàn)動(dòng)態(tài)調(diào)節(jié),改進(jìn)方案如下:
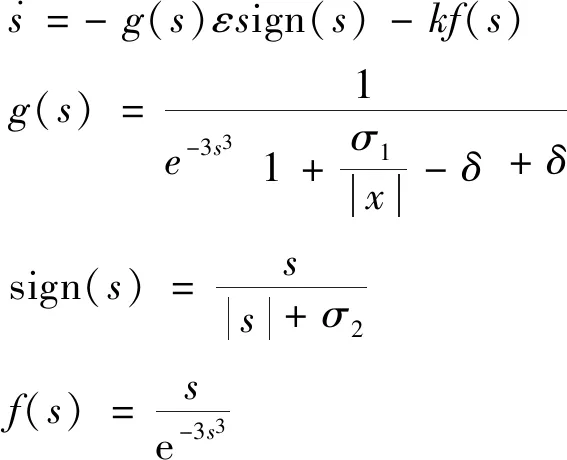
(18)
式中:k>0,σ1>0,σ2>0,0<δ1<0;x為系統(tǒng)的滑動(dòng)狀態(tài)。

通過式(17)和式(18)與PMSM運(yùn)動(dòng)方程聯(lián)立整理得到新型趨近率下SMC控制方程:
(19)
3.2 改進(jìn)趨近率穩(wěn)定性分析
(20)
這表明新型趨近率下的SMC系統(tǒng)的狀態(tài)向量可以在滑動(dòng)過程中的任何位置趨近于平衡點(diǎn),并進(jìn)行往復(fù)穿越運(yùn)動(dòng),保證系統(tǒng)的可行性與穩(wěn)定性。
4 仿真與試驗(yàn)研究
為了驗(yàn)證該方法的可行性,搭建仿真模型與半實(shí)物仿真平臺(tái)對(duì)其進(jìn)行驗(yàn)證。對(duì)PMSM控制系統(tǒng)進(jìn)行仿真,控制系統(tǒng)原理如圖2所示。
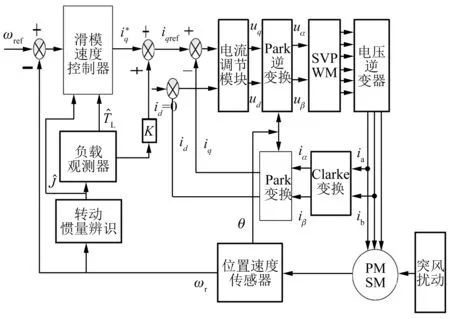
圖2 PMSM控制系統(tǒng)原理框圖
表1為試驗(yàn)電機(jī)參數(shù)表,表2為SMC參數(shù)表,表3為突風(fēng)模型與葉素參數(shù)表。
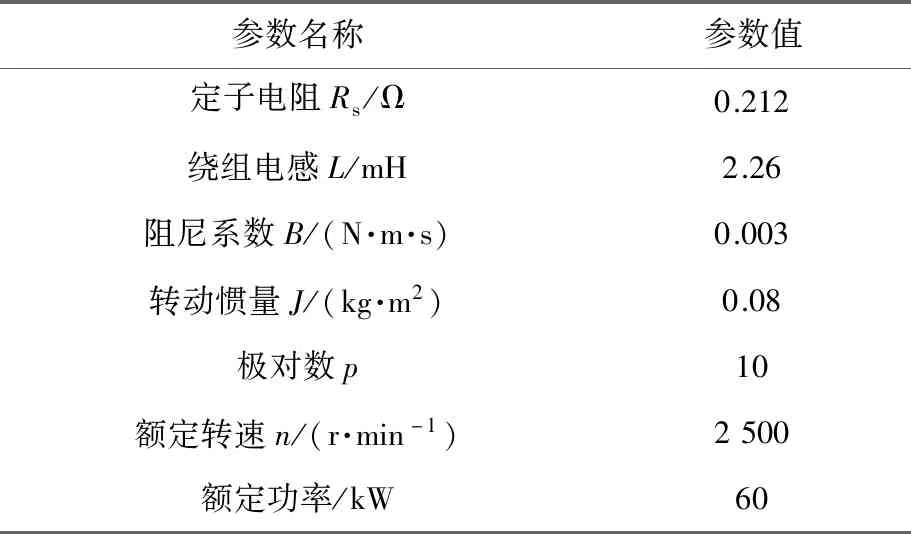
表1 電機(jī)參數(shù)表
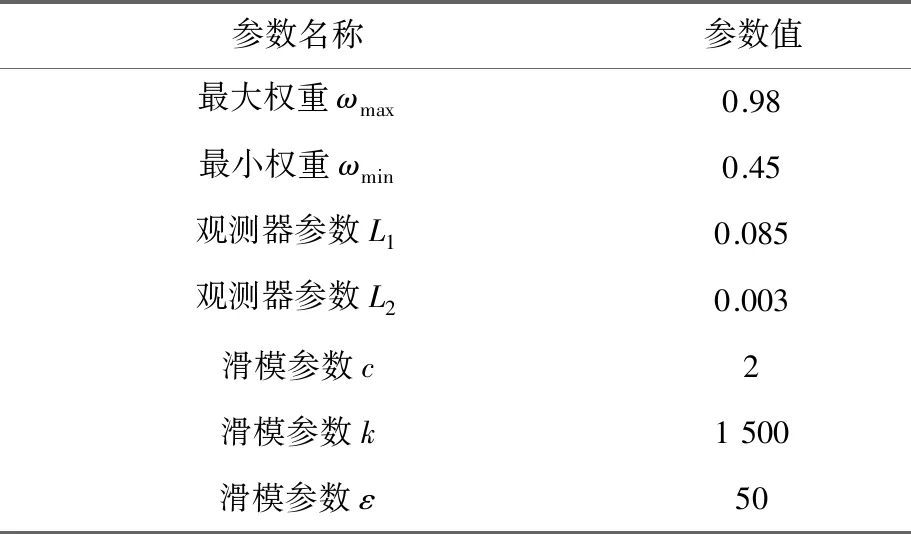
表2 控制器參數(shù)表

表3 突風(fēng)與葉素參數(shù)
圖3為本文設(shè)計(jì)辨識(shí)方法與最小二乘法的辨識(shí)結(jié)果收斂曲線,與后者相比,本文方法的收斂速度更快,辨識(shí)結(jié)果更精確。
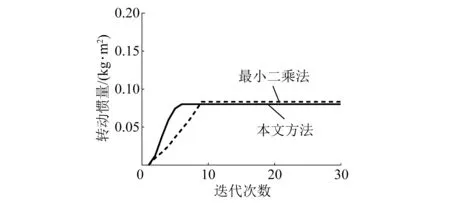
圖3 辨識(shí)模型
根據(jù)1-cos突風(fēng)模型,模擬的突風(fēng)曲線如圖4所示。圖5為PMSM模擬飛機(jī)啟動(dòng)至巡航階段轉(zhuǎn)速響應(yīng)曲線,給定轉(zhuǎn)速為2 400 r/min,在某一時(shí)間降至2 000 r/min。由仿真結(jié)果可知,在PMSM轉(zhuǎn)速響應(yīng)方面,本文設(shè)計(jì)控制器與PI控制器和SMC控制器的轉(zhuǎn)速響應(yīng)曲線相比超調(diào)更小,響應(yīng)速度更快。圖6為初始轉(zhuǎn)速1 500 r/min而后進(jìn)入突風(fēng)帶后的速度響應(yīng)變化曲線。由圖6可以看出,當(dāng)飛機(jī)巡航面對(duì)外界擾動(dòng)時(shí),PI控制器和SMC控制器轉(zhuǎn)速響應(yīng)產(chǎn)生的波動(dòng)較大,本文設(shè)計(jì)的控制器的響應(yīng)轉(zhuǎn)速波動(dòng)較小,抗擾能力更強(qiáng)。
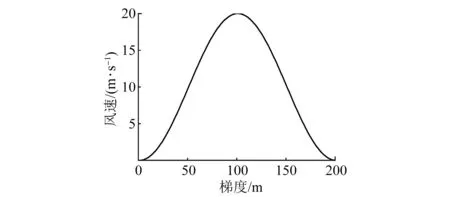
圖4 1-cos突風(fēng)模型
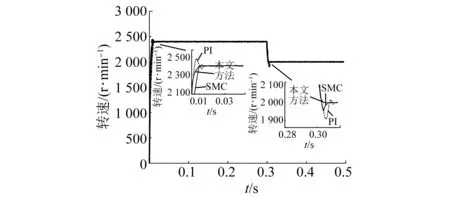
圖5 啟動(dòng)至降速指令下速度響應(yīng)曲線
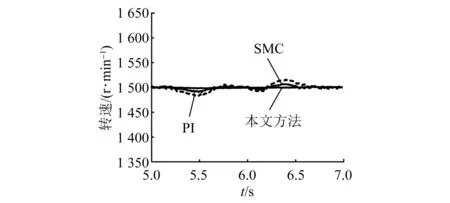
圖6 突風(fēng)情況下速度響應(yīng)曲線
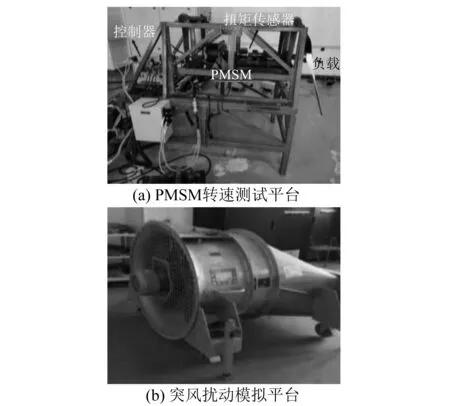
圖7 半實(shí)物仿真平臺(tái)
突風(fēng)擾動(dòng)模擬平臺(tái)和螺旋槳轉(zhuǎn)速半實(shí)物測(cè)試平臺(tái)如圖7所示。圖8為在本文所設(shè)計(jì)控制器、PI控制器和SMC控制器下,將電機(jī)啟動(dòng)給定轉(zhuǎn)速設(shè)定為2 400 r/min并在某一時(shí)刻降至2 000 r/min的轉(zhuǎn)速響應(yīng)擬合曲線。通過采樣后的數(shù)據(jù)擬合對(duì)比,當(dāng)實(shí)際轉(zhuǎn)速達(dá)到給定轉(zhuǎn)速時(shí),PI控制算法的轉(zhuǎn)速響應(yīng)超調(diào)量最大,趨于穩(wěn)定時(shí)間最長(zhǎng),穩(wěn)定后振蕩最大;與PI控制算法相比,傳統(tǒng)SMC算法的控制器轉(zhuǎn)速響應(yīng)超調(diào)量減小,趨于穩(wěn)定時(shí)間縮短,穩(wěn)定后振蕩方面均有改善,但仍不穩(wěn)定;本文設(shè)計(jì)控制算法的轉(zhuǎn)速響應(yīng)超調(diào)量最小,趨于穩(wěn)定時(shí)間最短,穩(wěn)定后振蕩最小,在動(dòng)態(tài)性能方面,均有很大的提升。
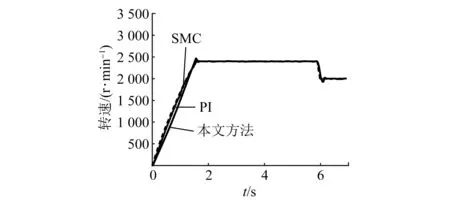
圖8 啟動(dòng)至降速指令下速度響應(yīng)擬合曲線
圖9為模擬飛機(jī)巡航時(shí),遇突風(fēng)擾動(dòng)下,本文所設(shè)計(jì)控制方法與PI控制方法及SMC控制算法電機(jī)轉(zhuǎn)速響應(yīng)擬合曲線。通過對(duì)比穩(wěn)態(tài)情況下遭遇突風(fēng)擾動(dòng)時(shí)的轉(zhuǎn)速響應(yīng)數(shù)據(jù),可見本文所設(shè)計(jì)的控制器抗擾動(dòng)能力較強(qiáng)。
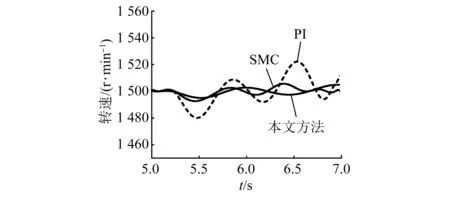
圖9 突風(fēng)狀態(tài)下速度響應(yīng)擬合曲線
上述三種方法的轉(zhuǎn)速響應(yīng)性能具體數(shù)據(jù)如表4所示,與PI算法和SMC算法相比,本文設(shè)計(jì)的控制策略在模擬電動(dòng)飛機(jī)啟動(dòng)過程中轉(zhuǎn)速響應(yīng)至穩(wěn)態(tài)的時(shí)間分別提升了0.33、0.28 s,轉(zhuǎn)速超調(diào)下降了56.5、28.4 r/min;模擬啟動(dòng)至巡航過程中,降速響應(yīng)時(shí)間分別縮短了0.32、0.26 s,轉(zhuǎn)速響應(yīng)超調(diào)分別下降了59.1、29.3 r/min;穩(wěn)定運(yùn)行時(shí)與給定轉(zhuǎn)速的誤差小于1 r/min,遇突風(fēng)后,轉(zhuǎn)速波動(dòng)更小。
5 結(jié) 語
本文以電動(dòng)飛機(jī)PMSM為控制對(duì)象,通過一種自適應(yīng)權(quán)重最小二乘法在線辨識(shí)轉(zhuǎn)動(dòng)慣量并進(jìn)行轉(zhuǎn)矩估計(jì)補(bǔ)償與改進(jìn)趨近率的滑模速度控制相結(jié)合的控制策略,設(shè)計(jì)了一款適用于電動(dòng)飛機(jī)的SMC控制器。與PI控制器和SMC控制器相比,本文所提方法改善了電動(dòng)飛機(jī)飛行過程中因轉(zhuǎn)動(dòng)慣量攝動(dòng)和遭遇突風(fēng)的情況產(chǎn)生轉(zhuǎn)速抖動(dòng)較大的問題,各性能指標(biāo)均得到了提升,較好地滿足了飛機(jī)巡航的轉(zhuǎn)速要求。

表4 轉(zhuǎn)速響應(yīng)性能對(duì)比
猜你喜歡
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時(shí)報(bào)(2022-05-30)2022-05-30 15:16:57
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2020-11-27 17:34:02
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
作文周刊·小學(xué)一年級(jí)版(2017年9期)2017-06-20 00:19:33
小學(xué)生導(dǎo)刊(低年級(jí))(2016年8期)2016-09-24 22:09:04
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12
