輸電線路走廊下大型樹木遠程帶電砍伐機器人
2022-11-21 06:48:42鄭孝干楊毅豪蔡金林馮振波
機械設計與制造 2022年11期
關鍵詞:作業
鄭孝干,楊毅豪,蔡金林,馮振波
(1.國網福建省電力有限公司福州供電公司,福建 福州 350009;2.國網福建省電力有限公司輸電帶電作業技術實驗室,福建 福州 350002;3.福州億力電力工程有限公司,福建 福州 350004)
1 引言
高壓輸電線路作為整個電網的大動脈,擔負著傳輸電能的重擔,其安全穩定直接影響到電力系統的可靠性[1-2]。同時高壓線路具有檔距大、輸電距離遠、線路走廊環境特征復雜、要求高等特點[3-4]。全國有數萬公里的高壓輸電線路穿梭在崇山峻嶺中,大型樹木的增長導致的安全距離不足嚴重威脅著線路的安全運行,如線路發生接地故障、防雷性能下降等,對樹冠的放電也有可能引發山林火災[5-6]。因此對線路走廊下安全距離過近的大型樹木的砍伐作業是提高電網可靠性的重要措施之一。目前,針對線路廊道下的問題,文獻[7]通過試驗方式研究了(±800)kV 直流輸電線路對鄰近樹木影響,確定在運線路與樹木的最小安全距離,而文獻[5]利用有限元的方法構建了線路下樹木表面的電場模型,研究確定1100kV 特高壓直流輸電線路的樹木安全距離。文獻[8]利用圖像識別算法提取樹梢與帶電導線的距離用于預警。文獻[9]詳細分析了樹木對輸電線路的防雷擊效果的影響。在對危險樹木的清除上,文獻[10-11]分別基于無人機激光雷達技術的構建了輸電線路走廊書障預警平臺和清理方法,但這只能對樹冠細枝進行清除,在特殊偏遠的山區,電力運維人員根本無法有效得進行短時頻繁的缺陷跟蹤。因此對于大型樹木,目前是通過人工徒手近距離砍伐的方式進行,但在電力系統行業內外曾發生過多起因砍伐樹木倒落造成的人身傷害事故[12-14]。作業人員在砍伐的過程中不僅要預防電鋸傷害、鋸子導板和鋸鏈被倒落的樹木壓砸彈跳等安全隱患對人身安全造成的威脅,同時還要時刻警惕判斷樹木倒落時機和自身安全撤離時機,這對作業人員的專業素質有著很大的要求。若砍伐接近帶電導線的大型樹木時,對樹木倒向判斷失誤或人員撤離不及時,極有可能造成人身觸電或其他危險情況,有文獻研究砍樹導向輔助鉤[15]來控制樹木砍伐方向,常規的對大型樹木的砍伐作業方式,需要運維人員運送登高竹梯和牽引裝置等大型設備進入山區,花費大量的人力物力。
因此,針對上述安全隱患、運維人員技能專業要求等問題,這里通過機器人設計需求進行機構部件機械結構設計,并融合樹木砍伐三角形原理、人機協同控制、視頻無線傳輸、APP 研發等技術,提出了一套基于Arduino mega2560芯片開發輸電線路走廊大型樹木遠程帶電砍伐機器人的硬件機械及軟件的設計方案,該方案可在輸電線路帶電的情況下,通過遠程可視化遙控的方式,控制裝有電鋸的機械臂實現對大型樹木的砍伐,使作業人員遠離樹木倒落范圍,不僅提高作業效率,而且大大提高大型樹木砍伐作業的安全性。
2 機器人設計需求
由于高壓輸電線一般處于山區,廊道下樹木多為不同直徑、不同品種的大型樹木,這要求機器人具備一定適應性。同時為了便于輸電運維人員攜帶,在重量和體積上也有所要求,因此綜合作業現場實際環境及運維人員作業需求,機器人應具備特性,如表1所示。
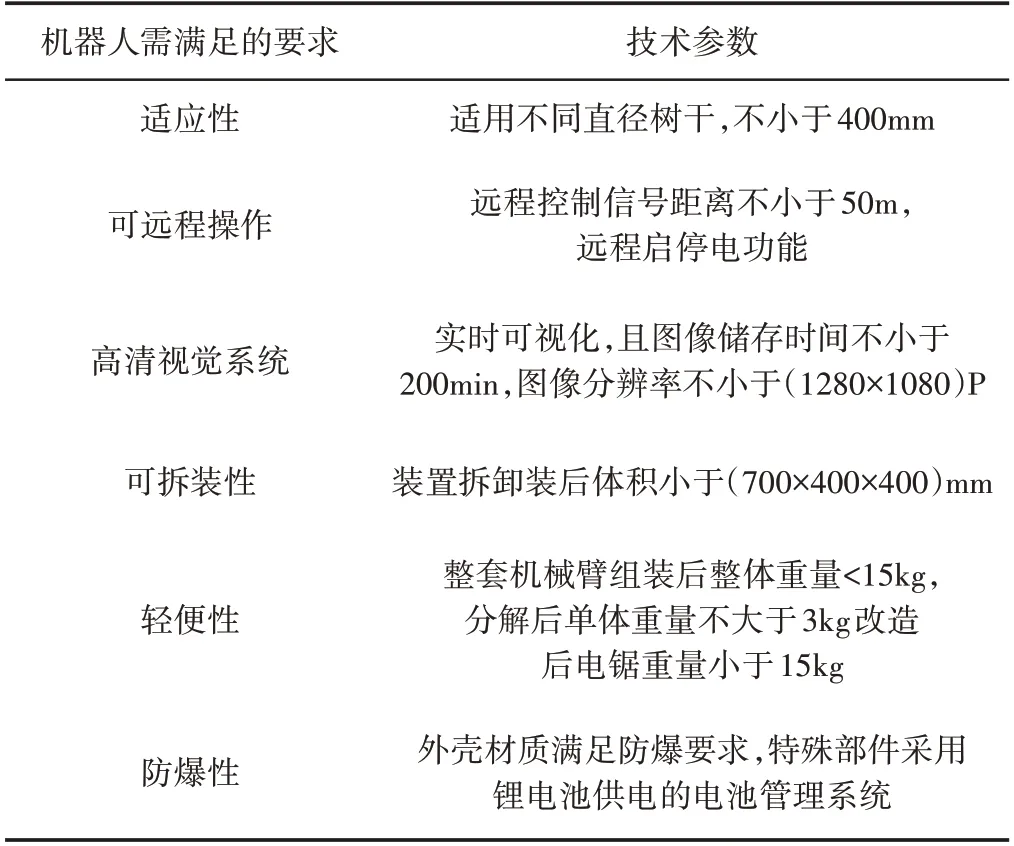
表1 機器人具備的特性Tab.1 The Necessary Features for the Robot
3 機器人機械結構設計
3.1 機器人結構組成
為了機器人可以滿足單人野外攜帶的需求,機器人采用可組裝設計,其可以拆分為伐木機構、輔助部件和監視控制三部分,具體的結構圖,如圖1所示。
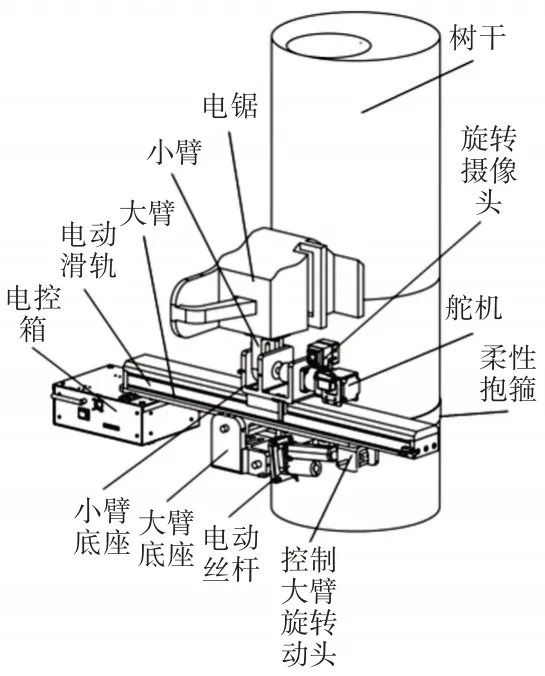
圖1 機器人的結構設計Fig.1 The Mechanism Design of Robot
3.2 組件機械設計
輔助部件包括弧形分為弧形夾具、柔性抱箍兩部分組成。其功能主要是通過柔性抱箍將弧形夾具固定在樹干上,使得機器人懸掛于半空,柔性抱箍可根據不同直徑的樹木自由調節,長度范圍在(600~12000)mm。而弧形夾具采用7075航空鋁合金,其是一種冷處理鍛壓合金,強度高,遠勝于軟鋼,設計結構,如圖2所示。其長度單位為mm。
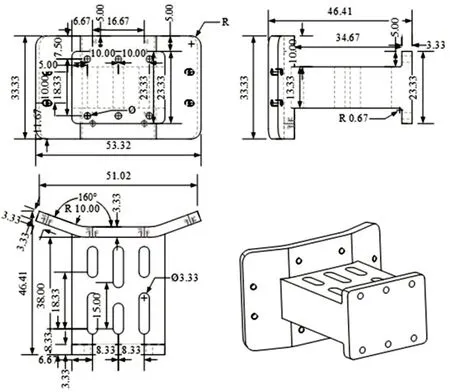
圖2 弧形夾具設計Fig.2 The Mechanism Design of Arc Fixture
動作的執行主要依靠伐木機,伐木機構包括控制大臂、翻轉小臂、整機底座、伐木電鋸四部分,機器人利用控制大臂與翻轉小臂可實現電鋸任意角度的動作路徑實現。其中控制大臂主要作用是控制伐木機械在X軸上水平移動、Z軸上圓周旋轉,其結構設計,如圖3所示。而翻轉小臂由小臂和底座組成,主要作用是控制電鋸沿X軸上進行進刀和伐木之間85°翻轉,其機構設計,如圖4所示。利用控制大臂和翻轉小臂的結構設計實現機器任意角度的作業。整機底座主要是伐木電鋸的承托平臺,使電鋸固定于翻轉小臂末端。控制大臂、翻轉小臂、整機底座材料均采用7075航空鋁合金。舵機是控制的是旋轉攝像頭的角度,保證現場作業情況無死角的傳輸回后臺。
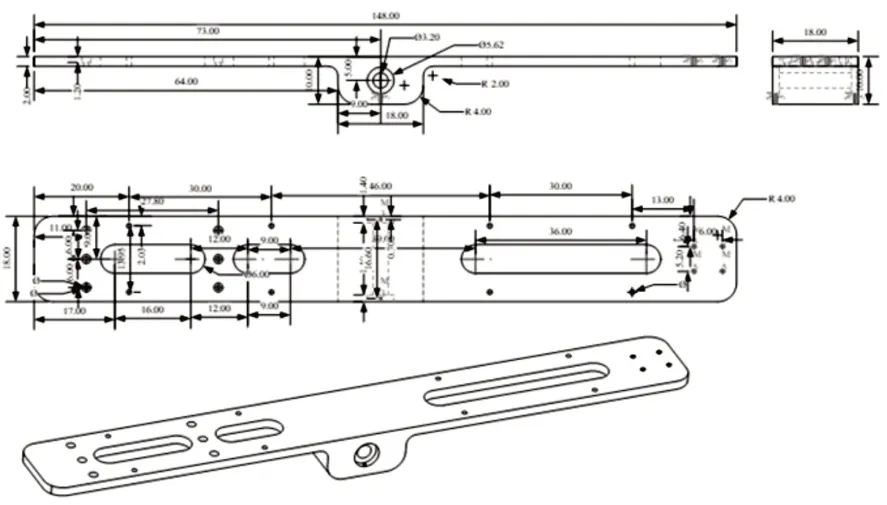
圖3 控制大臂設計Fig.3 The Mechanism Design of Arm
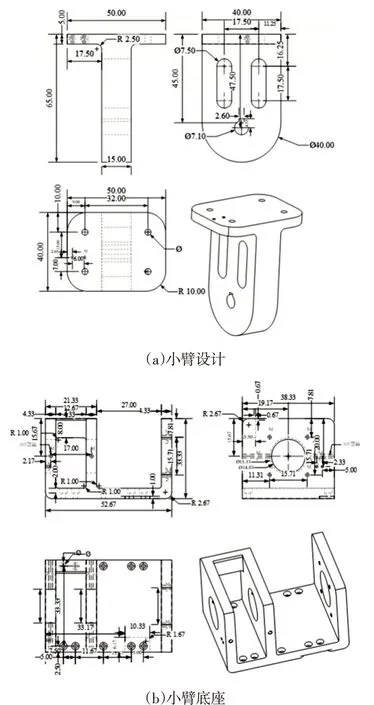
圖4 翻轉小臂設計Fig.4 The Mechanism Design of Whirling Arm
4 機器人控制系統設計
4.1 機器人控制系統方案
機器人的本體控制采用的是Arduino mega2560 主控芯片,工作電壓為5V,它具有54路數字輸入/輸出口,其中,含有15路PWM 輸出口,15路模擬輸入,4路UART 接口,一個16MHz晶體振蕩器,14 路數字輸入輸出口,每一路能輸出和接入最大電流為40mA。機器人控制系統應用中,將其中3個IO 上拉,用于接收限位開關的低電平信號。22-23IO 用于滑臺電機的PUL(脈沖)和DIR(方向)輸出,24-25IO 用于推桿電機的PUL(脈沖)和DIR(方向)輸出,26-27IO 用于翻轉電機的PUL(脈沖)和DIR(方向)輸出,IO30、IO32、IO33 分別初始化為低電平,連接繼電器用于控制電鋸的開關、保險裝置以及切割開關。IO9 用于控制攝像頭的旋轉。4 路串口信號,其中,一路串口接收口與內部ATmega8U2 USB-to-TTL 芯片相連,提供TTL 電壓水平的串口接收信號。其中,一組串口采用全雙工通訊方式,用于2.4g無線通訊端,接收RX 遙控端的命令信號,反饋TX 信息狀態。具體,如圖5所示。
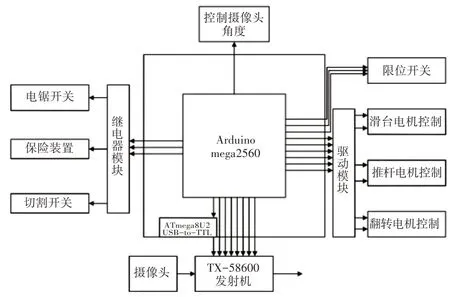
圖5 機器人控制系統Fig.5 The Design of Robot Control System
無線圖傳采用TX-58600 發射機,該發射機緊湊結構,體積小,發射功率大,采用大規模集成電路,可靠性高,并且內置頻率鎖相環、具有低諧波輻射、高穩定性,可支持5.8G視頻/音頻同步傳輸。攝像頭傳感器采用SONY CMOS IMX238,60幀720P高清(逐行掃描),130 萬像素彩色圖像傳感器,高彩色分辨率,高溫工作下,穩定的暗電平,畫面清晰沒有豎紋。整個模塊采用的是5.8G無線圖傳,傳輸距離可達(800~2000)m,完全滿足現場樹木砍伐距離要求。圖像傳輸攝像頭可實現上下左右四個方向進行調節,確保最大限度觀察現場作業情況。
4.2 機器人軟件設計
機器人軟件設計包括了數據發送與接收、數據采集、緊急停機等功能。在開機初始化時,拉高限位開關的IO 為高電平,當電鋸到達限位,限位開關即會發出低電平信號,運動停止。程序同時復位滑臺、推桿、翻轉機構的初始定位,以保證切割時的定位準確。程序流程圖,如圖6 所示。在對機器人本體控制主要分為兩部分,一部分是對執行切割動作的電鋸的控制,主要通過PWM來控制位移電機和電鋸轉速,以達到精準切割的效果,另一部分是攝像頭角度的調節,利用機器人本體的攝像頭角度控制電機來實現上下左右四個方向的調節,確保最大限度準確反饋現場作業情況給后臺。為了控制倒樹方向,電控程序電鋸的動作是模擬樹木砍伐規程[16]規定中的核心步驟,如圖7所示。首先將砍伐機器人固定在合適位置并設定好參數后,然后對樹干先鋸下口,后鋸上口,下口的深度為樹木根部直徑的1/4—1/3,下口開口高度為其深度的1/2,宜開三角形下口,其角度為(30~45)°,深度為根徑的1/4。通過上述部分,使樹木倒向切割下口的方向。
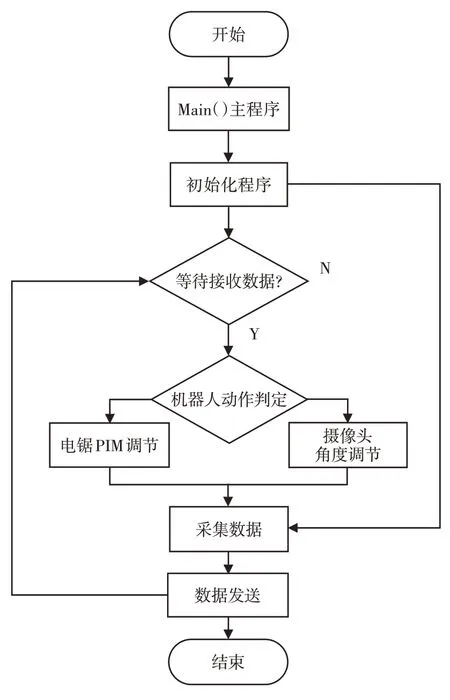
圖6 機器人軟件程序流程圖Fig.6 The Flow Chart of Robot Program Designing
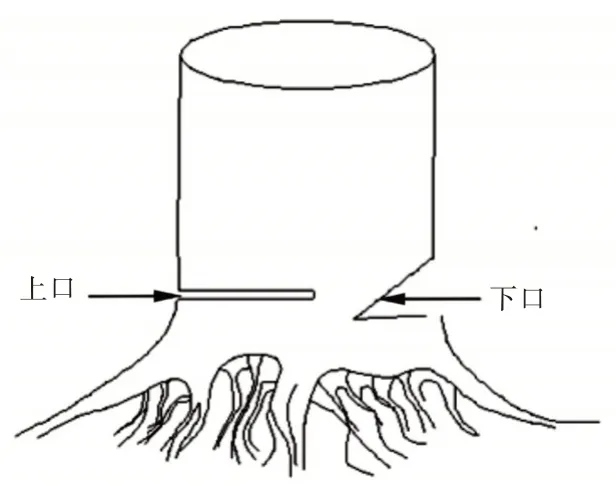
圖7 機器人砍伐動作示意圖Fig.7 Schematic Diagram of Wood-Cutting by Robot
4.3 機器人操作平臺
機器臂的上位機控制平臺采用兩個模式,一種是采用Usart HMI串口屏控制,采用2.4G頻段,杜絕高壓低頻干擾,其界面,如圖8(a)所示。
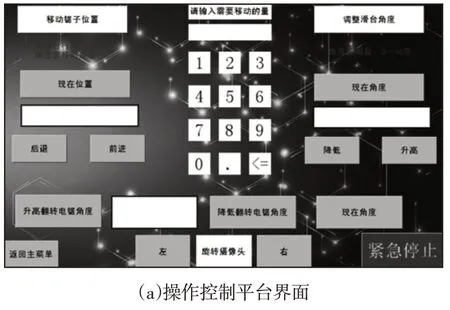
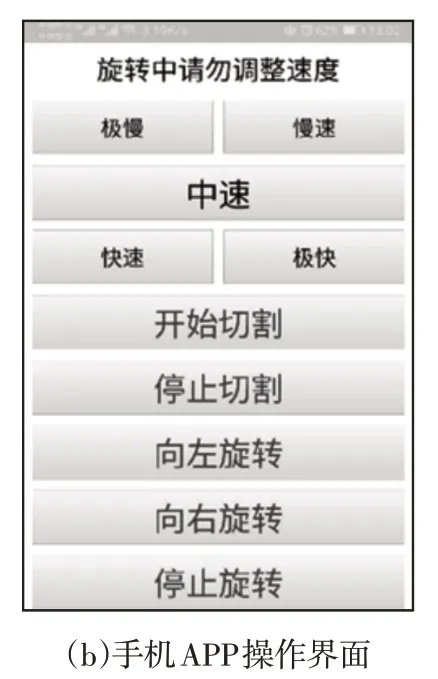
圖8 上位機控制平臺Fig.8 The Upper System of Control Platform
該模式為電力運維人員主要選擇的操作模式;另一種是做為前者的后備應急措施,采用WIFI無線與手機APP連接的模式,這種模式由于采用低功率WIFI發射模塊,所以在距離有所限制,由于只是作為備選使用,因此軟件配置上只是滿足于基本需求,其操作界面,如圖8(b)所示。
5 機器人樣機試驗
根據前述設計方案制作實物,其成品,如圖8所示。其中,控制大臂實物,如圖9(a)所示。小臂及小臂底座實物,如圖9(b)所示。
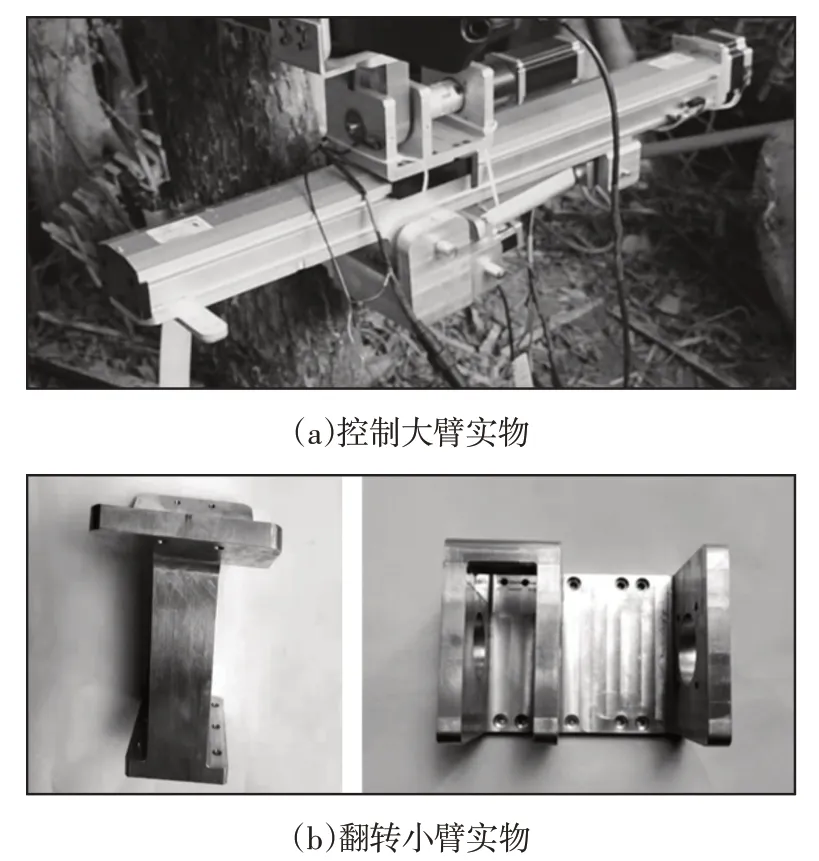
圖9 機器人金具樣品Fig.9 The Prototype of Hardware
通過各部件組裝,機器人樣機,如圖10所示。這里分別對不同直徑的樹木進行功能性驗證,并測試了定制軌跡等功能試驗。試驗過程中,首先對作業點進行確認,并對現場危險點進行分析,然后將弧形夾具安裝在伐木作業面樹干上,用柔性抱箍將夾具固定在樹干上,并收緊。同時將控制大臂、電鋸等部件組裝固定完畢,最終檢查安裝、接線情況確認無誤,開始切割,安裝過程,如圖11所示。機器人先于樹干一側割一個下口,再于另一側切割下口,具體切割方法見章節4.2。同時通過遠程終端實時監控切割畫面細節,如圖12所示。圖中可以看出機器人可以有效對樹木進行砍伐。機器人在進行智能砍伐與傳統人工砍伐相比,由于不需要搬運登高竹梯和牽引裝置、電力運維人員在安全范圍內遠程進行切割,線路不停電,同時對人員專業素質要求不高,可以有效避免在帶電線路下進行作業所引發的人員傷亡事故風險。傳統作業方式需要多(2~3)名工人,而這里所設計的機器人只需要一個作業人員遠程操控即可,因此機器人切割在安全性、效率性、成本性上都有明顯優勢。目前,樣機已在國網福建省電力有限公司國網福州供電公司轄區內220kV 中榕Ⅰ路、220kV 中榕Ⅱ路、110kV北西線等線路開展應用,通過現場作業人員實踐表明,機器人相對于傳統人工砍伐具有一定的優越性。

圖10 遠程可視化帶電砍伐機器人樣機Fig.10 The Principle Prototype of Robot

圖11 設備安裝過程Fig.11 The Process of Installing Equipment

圖12 遠程監控畫面Fig.12 Display of Remote Monitoring
6 結論
這里介紹一種可實現線路不停電方式下,對輸電線路廊道下大型樹木進行遠程智能砍伐的機器人,首先分析了輸電線路廊道下的大型樹木砍伐作業的風險和作業需求,確定了機器人應具備的特性,其次利用無線遠程傳輸技術實時傳送切割畫面,結合樹木三角形砍伐原理、人機協同控制技術,通過上位機控制平臺進行遠程控制,同時機器人還設計了合理的控制方案和電源配置方案。最后通過對樣機的測試和實際應用表明:
(1)樣機可適用樹干最大直徑為800mm的樹干砍伐作業;(2)監控圖像傳輸距離最大可達2000m,最佳作業為1600m范圍內;圖像儲存時長最大可達250min;(3)樣機組裝后旋轉臺長度393mm,寬度121mm,高度229mm,總重量為5.795kg;主機長度451mm,寬度217mm,高度225mm,總重量為7.410kg;除電鋸外,旋轉臺與主機可拆卸元件單體最大重量為2.98kg;(4)樣機整體外殼采用7075航空鋁合金,滿足防爆要求。電能管理系統,電鋸采用80V、5AH大容量鋰電池獨立供電;24V主機電源采用容量為10.8AH聚合物6串電池組供電;(5)經實際在220kV中榕Ⅱ路、110kV北西線的線路環境中對樣機試用,在對樹冠較為靠近帶電輸電線路作業時,線路可采取不停電方式,人員可以有效控制在安全距離外。綜上所述,這里所設計的機器人樣機具備表1所列機器人特性,可以滿足輸電運維作業現場實際環境與作業人員的需求。同時砍樹機器人的實際應用,可以有效避免在帶電線路廊道下砍伐大型樹木對電力運維人員的作業風險,并且輕便可組裝的設計也可以滿足運維人員巡檢攜帶的需求,可以很好有效替代人工砍伐作業。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
