磁力爬柱機器人結構設計與運動分析
2022-11-21 06:48:38王戰中杜啟鑫張明亮
機械設計與制造 2022年11期
王戰中,趙 童,杜啟鑫,張明亮
(1.石家莊鐵道大學機械工程學院,河北 石家莊 050043;2.張家口職業技術學院,河北 張家口 076450)
1 引言
隨著我國經濟發展越來越快,高速鐵路越來越發達,目前正在營運的高鐵站房大約有五百多座,約有八萬多根雨棚金屬支柱需要檢測和維護,許多車站的雨棚金屬支柱表面由于環境的原因已經出現了不同類型的損壞,這為高鐵運營帶來較大的安全隱患。目前,還沒有相關的自動檢測設備,高鐵站只能靠人工去完成雨棚金屬支柱的檢測與維護[1-2]。因此,開發一套機器人檢測設備有助于提高工作效率,減少人工勞動強度[3-5]。
在爬柱機器人方面,文獻[6]提出一種永磁吸附輪式爬壁機器人,該機器人由兩個驅動輪、四個輔助支撐輪與永磁吸附裝置組成,采用差動方式轉向,但是該機器人的工作間隙不能調節,并且由于磁吸附力的限制,越障能力非常小,不能滿足高鐵站金屬支柱表面檢測的作業要求。文獻[7]提出一種變磁力履帶式移動平臺,該機器人雖然可以通過磁吸附力的改變來減小運動阻力,但是在轉向時履帶上永磁鐵塊與壁面之間的磁吸附力不能改變,致使轉向阻力增大,所以該機器人的轉向能力較差。文獻[8]提出一種新型變磁力輪式爬壁機器人,該機器人的磁吸附裝置可通過電機帶動齒輪在平行壁面方向上做圓周運動,從而改變工作間隙,實現磁吸附力的調節,但是該機器人不能實現原地轉向并且由于越障能力的限制,工作效率會大大降低。文獻[9]提出一種絲杠移動型爬桿機器人,該機器人由兩個支撐架、絲杠螺母、兩個機械手組成,需要由機械手夾緊支柱來實現攀爬動作,因此該機器人不能適應于不同直徑的金屬支柱。文獻[10]提出一種雙手爪式爬柱機器人,該機器人設計了具有首尾對稱結構的五自由度雙手爪式仿生攀爬機器人模型。但是隨著金屬支柱的直徑增大,機器人的手爪將會增大,因此該機器人不適合在大直徑金屬支柱上作業。文獻[11]提出一種適應不同導桿直徑的多姿態爬桿機器人,該機器人使用六角支架、直徑部件等結構組成,雖然該機器人可以在一定范圍內適應直徑不同的導桿,但是隨著桿件的直徑增加,機器人的剛度將會減小,并且在維護金屬支柱時效率低下。
綜上所述,目前關于爬柱機器人的研究大都不能在支柱上實現靈活變向、調節工作間隙且不能適應不同直徑的支柱與越障能力較低,針對此不足,這里基于高鐵站雨棚金屬支柱,使用Solidworks軟件建立了磁力吸附爬柱機器人模型并運用Adams軟件對機器人的前進后退、90°轉向與調節工作間隙等動作進行仿真分析,最終確定了合理的工作間隙范圍與磁吸附力范圍。
2 機械結構設計
2.1 機器人設計技術指標
(1)機器人越障能力可達20mm。(2)機器人自重小于等于60kg。(3)機器人負載能力小于等于20kg。(4)適用于直徑為(600~800)mm的金屬支柱。
2.2 總體布局
該磁力吸附爬柱機器人左右兩側分別有兩個驅動輪與兩個轉向電機驅動的轉向機構,每個轉向機構帶有一個驅動輪,以便在實現90°轉向后可圍繞金屬支柱沿圓周方向行走。中間是由永磁鐵塊、弧形軛鐵與絲杠螺母組成的磁吸附裝置,絲杠螺母機構用來調節工作間隙(永磁鐵塊到支柱表面的距離),以便機器人正常工作。機器人三維模型,如圖1所示。

圖1 磁力吸附爬柱機器人三維結構Fig.1 Three Dimensional Structure of Magnetic Adsorption Climbing Robot
2.3 磁吸附裝置設計
該裝置包含導軌、絲杠螺母機構與帶有永磁鐵塊的弧形軛鐵。驅動電機通過驅動固定在螺母上的從動錐齒輪使絲杠上下運動,從而調節工作間隙到合適值,使該機器人正常工作。磁吸附裝置三維模型圖,如圖2所示。
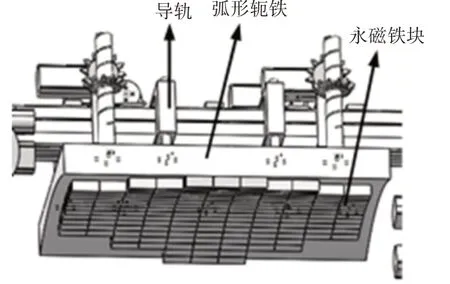
圖2 磁吸附裝置模型圖Fig.2 Model of Magnetic Adsorption Device
2.4 直角轉向機構設計
90°轉向機構的工作原理為:在需要轉向時機器人停止運動,轉向電機使驅動輪向外轉過90°,之后機器人可圍繞支柱沿圓周行走。90°轉向機構結構模型,如圖3所示。

圖3 90°轉向機構Fig.3 90° Steering Mechanism
3 靜力學分析
3.1 摩擦力分析
(1)機器人靜止時要保證機器人在金屬支柱上不向下滑移。機器人在靜止狀態的受力圖,如圖4所示。
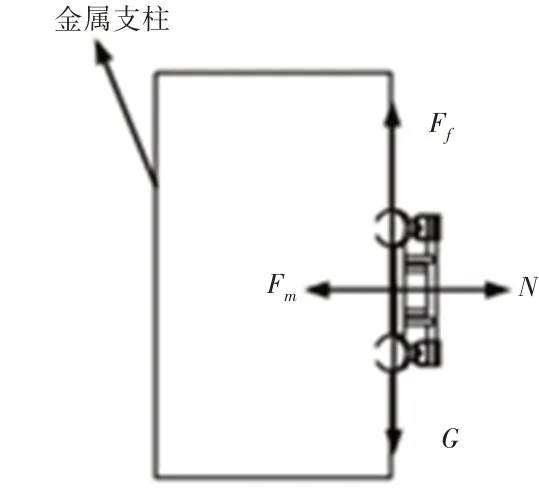
圖4 機器人靜止狀態受力分析Fig.4 Force Analysis of Robot in Static State

式中:N—支持力;Fm—磁吸附力;μ—輪子與壁面摩擦系數,取為0.6;Ff—摩擦力;G—機器人的重力。
在Solidworks軟件中為機器人各零件添加相應的材料屬性,并計算出機器人的自身重量G約為60kg,如圖5所示。由于機器人所帶的負載不大于20kg,所以將機器人的重量記為80kg,由式(1)~式(3)可算出機器人靜止所需要的磁吸附力約為1350N。出于安全考慮將磁吸附力增大到1700N。
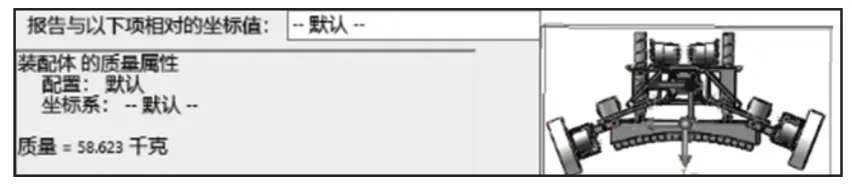
圖5 機器人自重Fig.5 Dead Weight of Robot
(2)磁力吸附爬柱機器人在金屬支柱表面上正常行走時不能發生滑移現象,并且驅動電機驅動車輪克服摩擦力。正常行走受力分析,如圖6所示。根據式(4)~式(13)可得出機器人正常行走所需要的磁吸附力。

圖6 正常行走受力分析Fig.6 Force Analysis of Normal Walking

式中:Fn1、Fn2、Fn3、Fn4—車輪與壁面的實際支持力;N1、N2、N3、N4—法向支持力;Fm—磁吸附力;Fa—牽引力;Ff1、Ff2、Ff3、Ff4—四個車輪與壁面的摩擦力;μ1—車輪與壁面的摩擦系數,取為0.6。
由式(4)~式(13)計算可得正常行走所需的磁吸附力約為3050N。同樣,出于安全考慮,取正常行走時安全系數為1.13,對應的磁吸附力將增大到3400N。
3.2 磁吸附力計算
使用40塊(6x4x2.5cm)牌號為35的釹鐵硼永磁鐵來制作磁吸附裝置,將其按Halbacch 弧形陣列布局,5 塊Halbach 弧形陣列模型,如圖7所示。其中,箭頭方向表示磁化方向。
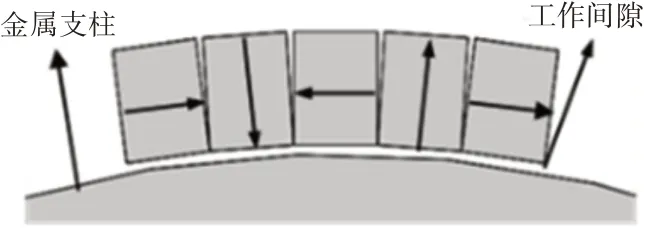
圖7 5塊Halbach弧形陣列模型Fig.7 5 Halbach Arc Array Model
Halbach永磁體弧形陣列的磁吸附力可由下式得出[12]:

式中:a—永磁體長度;b—永磁體寬度;μ0—空氣導磁率;L—工作間隙;k—周波數;Br—永磁體的剩余磁感應強度;d—永磁體厚度。
由式(14)可知:只要永磁鐵材料確定,剩余磁感應強度也就確定。又由于該裝置采用大小為(6×4×2.5)cm的永磁鐵,因此永磁鐵的體積也已知,所以工作間隙的長度是影響磁吸附力的主要因素,工作間隙越大,磁吸附力越小。將此吸附裝置在Ansoft 軟件中進行有限元仿真分析,得到的磁吸附力,如表1所示。使用Origin軟件繪制成曲線圖,如圖8所示。
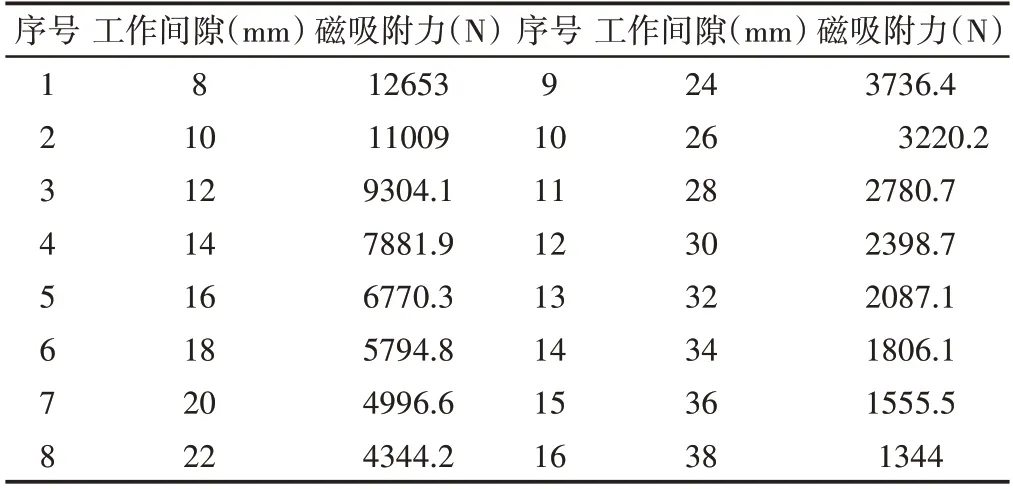
表1 40塊Halbach弧形陣列的永磁鐵磁吸附力Tab.1 Permanent Magnet Magnetic Adsorption Capacity of 40 Halbach Arc Arrays
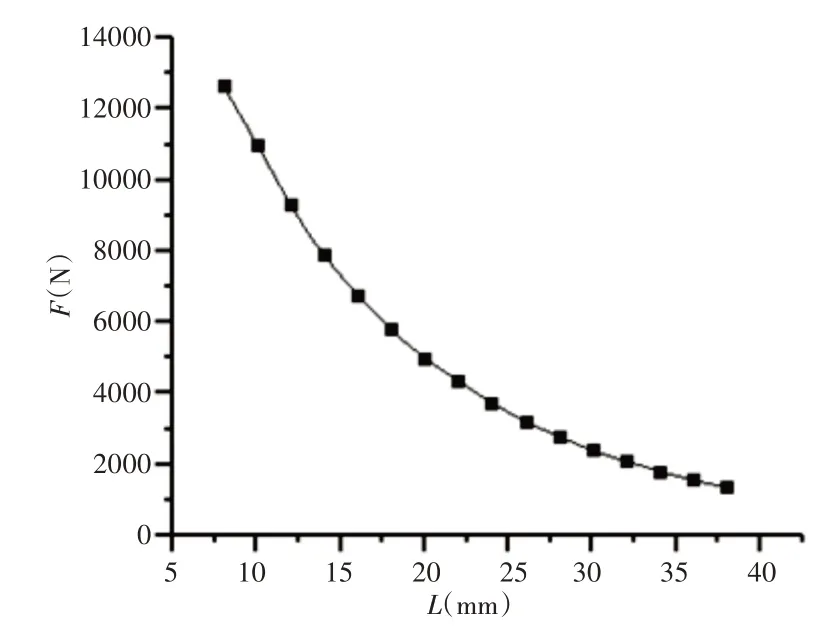
圖8 不同工作間隙下的磁吸附力曲線圖Fig.8 Curve of Magnetic Adsorption Force Under Different Working Gaps
由圖8可看出,隨著工作間隙的增大磁吸附力在逐漸減小,符合式(14)反應的趨勢。由表1 可知,當工作間隙為24mm 與34mm時,對應的磁吸附力分別是3736.4N與1806.1N,可滿足機器人的設計指標與工作要求。當工作間隙小于24mm時,磁吸附力在4000N以上,這將導致摩擦力增大,相應的對驅動電機的功率和機器人整體剛度要求也要增大;如果工作間隙大于34mm,磁吸附力在1500N以下,這將不能保證機器人作業的安全性。因此工作間隙定為24mm與34mm。
4 運動學分析
4.1 運動過程的磁吸附力分析
按照第3節得出的結論運用Adams軟件[13]對其進行運動學仿真,仿真時間設為29s,步長為100。未調節工作間隙時磁吸附裝置質心到支柱所在軸線距離的曲線圖,如圖9所示。金屬支柱直徑為600mm,軛鐵厚度為12mm。如圖9所示,(3~9)s處于正常行走狀態,工作間隙在24mm左右(355-300-25-6)。(9~10)s爬柱機器人處于90°轉向狀態,工作間隙變小,(10~22)s爬柱機器人圍繞柱子行走,工作間隙大約在8mm附近。(22~23)s爬柱機器人第二次90°轉向,(24~26)s處于正常行走狀態,工作間隙在24mm左右。由圖9可知,在第一次90°轉向之后繞著支柱圓周運動時,工作間隙為8mm 左右,此時對應的磁吸附力大約在12653N左右。由于磁吸附力太大,對電機與機器人整體剛度要求會增大很多。為此,采用增大工作間隙降低磁吸附力的方法來降低這種影響。調節工作間隙后的磁吸附裝置質心到支柱所在軸線的距離曲線圖,如圖10 所示,從圖中可以看出,在爬柱機器人兩次90°轉向時,很短時間內工作間隙就調整到24mm左右,以保證磁吸附力的穩定性和爬柱機器人正常的行走性能。
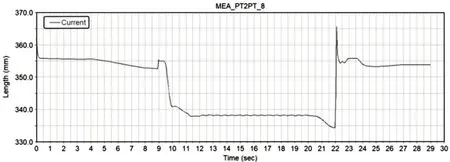
圖9 磁吸附裝置質心到支柱所在軸線的距離(調節工作間隙前)Fig.9 Distance Between the Mass Center of the Magnetic Adsorption Device and the Axis of the Pillar(before Adjusting the Working Clearance)
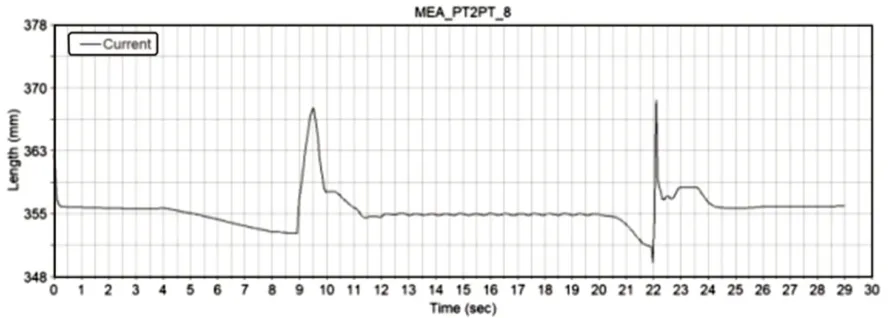
圖10 磁吸附裝置質心到支柱所在軸線的距離(調節工作間隙后)Fig.10 Distance Between the Mass Center of the Magnetic Adsorption Device and the Axis of the Pillar(after Adjusting the Working Clearance)
調節工作間隙后對應的磁吸附力曲線圖,如圖11所示。9s開始90°轉向時,將工作間隙加大到34mm左右,此時對應的磁吸附力為1800N左右,能夠保證機器人吸附在金屬支柱上,90°轉向完成后,工作間隙又調整為24mm 左右,對應的磁吸附力在3736.1N 左右,能保證爬柱機器人繞支柱圓周行走。第二次轉向采用同樣方法保證工作間隙在24mm 左右,使磁吸附力保證在3736.1N 左右。這樣,無論在爬柱機器人沿金屬支柱上下行走,還是繞金屬支柱圓周行走,40 塊(單塊體積為(6×4×2.5)cm永磁鐵Halbach 弧形陣列作為磁吸附裝置都能夠保證爬柱機器人安全運行。
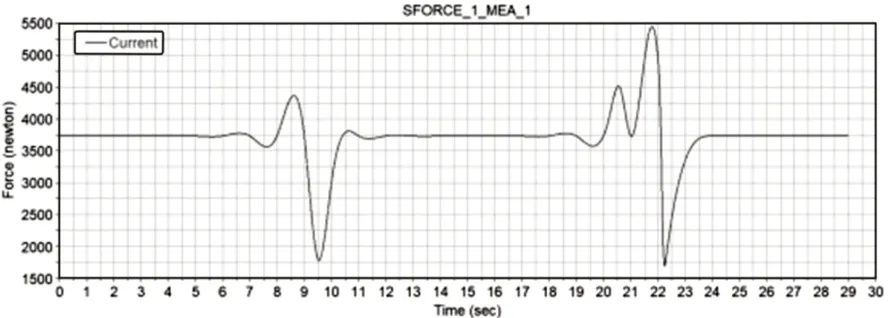
圖11 調節工作間隙后對應的磁吸附力圖Fig.11 Corresponding Magnetic Adsorption Diagram after Adjusting the Working Gap
4.2 運動過程分析
坐標系設置,如圖12所示。機器人的運動過程可描述為:機器人首先在支柱上靜止3s,然后沿Z正方向行走4s,之后實現第一次90°轉向并圍繞支柱行走180°后實現第二次轉向,最后沿Z負方向行走。機器人運動過程中的Z向位移曲線圖,如圖13所示。從圖13可看出,在(0~3)s時機器人靜止不動,(4~8)s時機器人沿著Z軸正方向行走,位移曲線為傾斜的直線,即行走速度為常數,在(8~9)s機器人處于靜止狀態,為90°轉向做準備,(9~10)s是第一次90°轉向階段,在該過程中由于輪子與支柱表面由面接觸變為線接觸導致摩擦力發生突變,引起圖中的位移曲線發生了一定的變化。(11~20)s機器人在圍繞金屬支柱做圓周運動,位移曲線為水平直線即Z軸上的位移沒有發生變化。(22~23)s機器人實現第二次90°轉向,與第一次轉向的變化趨勢相同,(24~26)s機器人沿著Z軸負方向行走,由曲線可知機器人在做勻速運動。(26~29)s機器人處于靜止狀態。

圖12 坐標系設置Fig.12 Coordinate System Setting
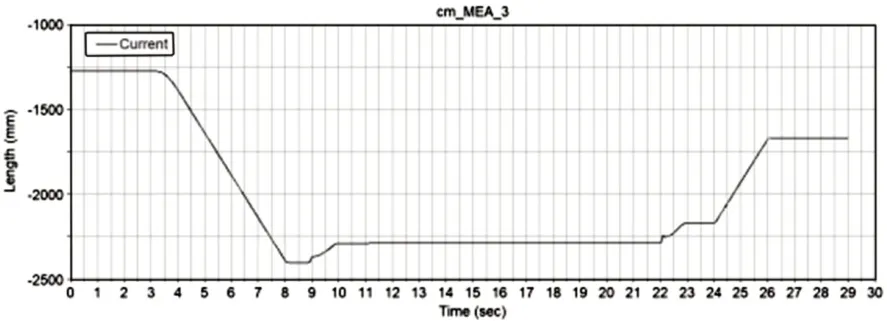
圖13 機器人運動過程中的Z向位移曲線圖Fig.13 Z-Direction Displacement Curve of the Robot During its Movement
5 實驗研究
與石家莊某機器人公司合作制作樣機一臺并進行前行后退、90°轉向等實驗研究,如圖14 所示。機器人正常行走速度為160mm/s。實驗表明:(1)當工作間隙大于36mm時機器人會發生向下滑動,不能靜止在支柱表面上。(2)機器人在正常行走時,測得的磁吸附力約為3750N,和仿真結果基本一致。(3)機器人在90°轉向時,轉向速度基本在30mm/s,可實現平穩轉向。
6 結論
(1)針對高鐵站雨棚金屬,設計磁力爬柱機器人,分別介紹了機器人設計的技術指標,磁吸附裝置以及90°轉向機構。
(2)通過對機器人靜止狀態與行走狀態受力分析,得出所需要的磁吸附力,采用40塊(6×4×2.5)cm Halbach弧形陣列布局的永磁鐵塊制作磁吸附裝置并通過數學模型得出工作間隙對磁吸附力有極大的影響。
(3)使用Adams軟件與Ansys軟件對磁力吸附爬柱機器人進行運動學仿真分析,并制作樣機進行實驗研究,證明其可行性。
