基于改進的SIFT算法的工件輪廓配準方法
2022-11-17 07:51:50林少鑫方千山
機械工程師 2022年10期
林少鑫,方千山
(華僑大學 機電及自動化學院,福建 廈門 361021)
0 引言
圖像配準是指將不同時間、不同傳感器或不同條件下獲取的兩幅或多幅圖像進行匹配、疊加的過程[1]。對工件輪廓圖像進行配準是指對于同一類工件在不同拍攝條件下進行輪廓匹配的過程,通過工件輪廓圖像配準可以獲取工件二維位姿信息,是機器人視覺引導系統中對工件位姿感知的重要組成部分。在輪廓配準中,對于特征點的提取算法一直是國內外的研究熱點,2004年Low[2]在國際計算機視覺雜志發表了提取圖像特征的尺度不變關鍵點的論文,該算法能夠有效提取圖像中最具有代表性的特征點,并且具有尺度不變性和旋轉不變性,但是,該算法計算復雜,特征提取耗時長,很難實現實時性。FAST算法是2006年被提出的快速特征提取算法[3],該算法通過畫圓法,設置一個閾值t,如果圓中像素點存在n個連續像素點的灰度值都高于Ip+t,或者低于Ip-t,那么像素點p就被認為是一個角點,該算法計算簡單,但是特征提取不穩定,尤其是在視覺引導系統中很難準確獲取工件位姿。2011年ORB算法被提出[4],該算法結合了FAST和BRIEF算法,具有尺度不變性和旋轉不變性,可以實現實時檢測,但是,和FAST算法一樣存在特征提取不穩定的缺點。
綜合了上述算法的優缺點,在視覺引導系統中,本文擬采用工件輪廓與模板輪廓進行配準的方法來獲取工件的位姿信息,本文采用了改進的SIFT算法對工件輪廓進行特征點提取,直接在原圖上計算高斯尺度空間,不構建圖像金字塔,計算出高斯差分圖像,然后在高斯差分圖像上求解極值點作為圖像的特征點,對于提取的特征點不會再使用SIFT算法的特征描述算子,而是采用直接與模板圖像中特征點進行嘗試匹配,計算圖像重合度的方法來選出最匹配點。最后通過實驗仿真證明,該算法能夠在保證較高實時性的同時準確完成了工件輪廓與模板輪廓的配準。
1 SIFT特征提取原理
1.1 定義圖像的尺度空間
為了實現在不同的尺度空間使用不同尺度的窗口,對于小的特征點使用小的窗口,對于大的特征點使用大的窗口,SIFT算法使用了尺度空間濾波器。定義圖像的尺度空間為原始圖像與一個可變尺度的二維高斯函數G(x,y,σ)卷積運算:

σ是尺度空間因子,它決定了圖像的模糊程度。
1.2 構建高斯差分金字塔
將原圖像的長寬放大為原理的兩倍,然后在放大的圖像上對該尺寸下圖像采用不同尺度空間因子的高斯核進行卷積得到金字塔一層的一個小組Octave[5],然后選擇該Octave中的一幅圖像進行下采樣作為金字塔下一層的初始圖像,以此類推完成整個圖像金字塔的構建,得到如圖1所示模型。

圖1 高斯差分金字塔模型
利用高斯拉普拉斯算法(LoG)可以在不同的尺度下檢測圖像的關鍵點信息,從而確定圖像的特征點,然而LoG計算復雜,關鍵點提取效率低,為了簡化計算,David G.Low采用了DoG(高斯差分)來近似LoG,這里對金字塔的每個Octave中相鄰的兩層相減構成了高斯差分金字塔[6],如圖2所示。

圖2 高斯差分金字塔模型
1.3 極值點提取
在構建完高斯差分金字塔后,就可以在不同的尺度空間中搜索局部最大值。在圖像中的一個像素點,在本圖像中需要是8領域內的局部最大值,也要與尺度空間中上下兩層中的相鄰18個點作比較,如果都是局部最大值,那么它就可能是一個關鍵點[7],如圖3所示。

圖3 極值點提取立方體
極值點搜索過程中,從每組的第二層開始,以第二層為當前層,對第二層的DoG圖像中的每個點取一個3×3的立方體,立方體上下層為第一層與第三層[8],如果該點是該立方體中的最大值,就是可能的極值點。
1.4 特征點的定位
采用高斯差分金字塔進行的極值點檢測對噪聲和邊緣比較敏感,因此SIFT算法在尺度空間的泰勒級數展開獲得極值的準確位置,如果極值點的灰度值小于閾值就會被忽略掉。同時,DoG算法對邊緣非常敏感,所以必須要把邊界去掉。SIFT算法中是采用了Harris角點檢測算法,當一個特征值遠遠大于另外一個特征值時,檢測到的是邊界,因此可以用該算法排查邊界點。
2 改進的SIFT算法
通過對SIFT算法原理的分析,可以發現SIFT算法計算步驟多,這是導致該算法在進行特征提取時耗時長的主要原因。SIFT算法提取了不同尺度下所有的特征點,但是,在機器人視覺引導系統中,為了獲取工件的位姿信息,本文采用了工件輪廓與模板輪廓配準的方法,由于選取的模板與工件只考慮選擇和平移兩種仿射變換,因此為了求解工件的位姿信息,只需準確找到工件的兩個特征點并與模板圖像進行準確匹配即可計算出工件的二維位姿信息。本文以機器人視覺引導系統拍攝的一種不規則工件圖像輪廓為例,如圖4所示,圖4(a)是選取工件模板原圖,使用大津二值化(OTSU)算法對工件進行二值化操作,得到圖4(b),最后提取圖像的輪廓圖像,得到圖4(c),最后通過改進SIFT算法對模板輪廓進行特征點提取,并繪制了特征點圖,如圖4(d)所示。

圖4 工件模板圖像
本文針對視覺引導系統算法的設計方案,對SIFT進行了改進,為了提高算法的運行效率,算法的流程如下:
1)計算高斯尺度空間。
由于模板輪廓圖像與工件輪廓圖像大小一致,只是對圖像進行平移和旋轉,因此本文使用SIFT中特征提取算法,只需要提取圖像輪廓的兩個特征點即可,并不需要提取工件輪廓在各個尺度下的所有特征點。因此,本文直接在原圖像上計算尺度空間,并不進行上下采樣。因為最后只需要生成一張高斯差分圖像,因此需要設置4個尺度空間因子,選取第一層次的模糊系數σ0=1.6,模糊系數的計算公式為

其中,r為圖像的索引號。最后使用不同尺度空間因子的高斯核直接在原圖上進行卷積,得到4幅尺度空間圖像,如圖5所示。

圖5 高斯尺度空間圖像
2)計算高斯差分圖像。
為了能夠達到與SIFT算法接近的特征提取效果,本文保留了SIFT算法中使用高斯差分圖像求極值點的方法,通過上一步驟計算尺度空間,相鄰兩個尺度空間圖像之間作差獲得高斯差分圖像,通過第二幅尺度空間圖像與第一幅尺度空間圖像作差得到高斯差分圖像,第三幅尺度空間圖像與第二幅尺度空間圖像作差得到第二幅高斯差分圖像,依此類推獲得了3幅高斯差分圖像(如圖6),后續的特征點提取就是在高斯差分圖像上進行的。

圖6 高斯差分圖像
3)極值點檢測與圖像特征點提取。
從第二個高斯差分圖像開始,對每個像素取一個3×3的立方體,如果該像素點是該立方體的最大值,那么該點就作為圖像的候選特征點,由于本文只提取了圖像的部分特征點,對于輪廓圖像提取的特征點比較少,因此本文對候選點只需排除低對比度的點,設置灰度閾值為0.04,如果高斯差分圖像提取的極值點在差分圖像上的灰度值小于該閾值,那么就忽略該極值點。
4)計算最佳匹配特征點。
由于工件輪廓圖像與模板圖像的只存在平移和旋轉的仿射變換,因此本文通過計算圖像輪廓重心作為輪廓的旋轉中心,重心計算公式如下:

式中:wi為像素點的灰度值;W為所有像素的灰度值總和。
本文擬通過工件提取的特征點逐個與模板中的特征點進行匹配計算仿射變換參數,通過兩個輪廓的重合度來衡量匹配結果,按照重合度排序,選擇重合度最高的點完成圖像配準。因此,定義兩個圖像的配準重合度為

式中:Scoi為工件輪廓包圍區域與模板輪廓包圍區域重疊的面積;Stmp為模板輪廓包圍的面積;S為工件輪廓包圍的面積。
3 實驗設計與結果分析
為了驗證算法在實際應用場景中的正確性,本文通過機器人視覺引導系統采集了實際場景的總圖像,通過圖像分割獲得了33張工件的圖像。本實驗特征點提取時間t,和配準重合度兩個重要參數,特征點提取時間是為了驗證改進的SIFT算法與原來的SIFT算法的特征提取效率,配準重合度是為了驗證該算法完成工件配準的可行性。最后通過獲取到匹配的特征點,對工件圖像進行仿射變換,并與模板圖像比較,驗證本文算法在視覺引導中的可行性。
實驗環境為Windows10環境下,采用Intel corei7-10510U CPU和8G內存,算法采用Python語言實現,結合OpenCV圖像處理庫搭建了SIFT算法和改進SIFT算法,分別對工件使用這兩種算法進行特征提取,并計算時間。使用改進的SIFT進行特征提取結果,計算相對于模板圖像的仿射變換參數,并對工件進行圖像配準。部分工件輪廓圖像的運算結果如表1所示。
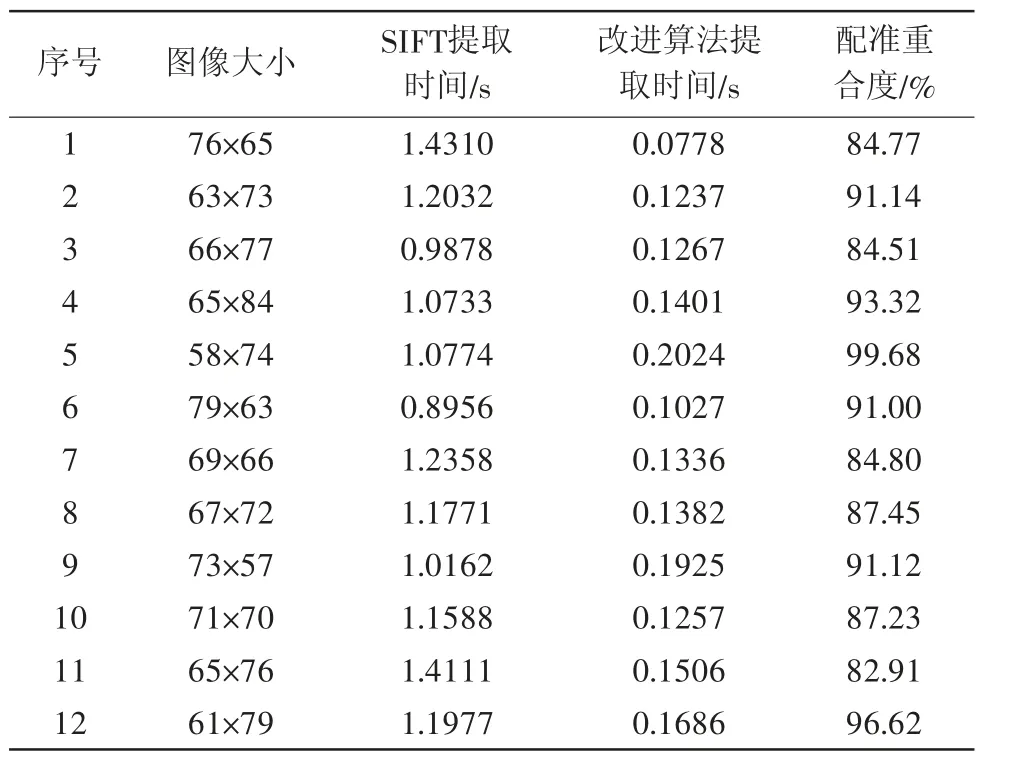
表1 部分工件輪廓圖像的實驗結果比較
通過表1可以發現,改進的SIFT算法在特征提取效率上大約是原來的SIFT算法的提取效率的10倍,對于圖像重合度分析,可以發現配準后的圖像與模板圖像的重合度都保持在80%以上。由于本文只考慮了圖像的旋轉和平移兩種仿射變換,而實際場景中圖像,由于相機拍攝的角度不同會造成工件輪廓的微小變形,因此可能會存在重合度不高的情況,但是在實際視覺引導中,該算法可以比較穩定地獲取工件的二維位姿信息。最后本文通過仿射變換的方式來模擬引導機器人抓取工件使工件與模板圖像具有相同的位姿,圖7所示為是部分工件的初始位姿,通過改進的SIFT算法提取的特征點,計算仿射變換參數,并通過仿射變換對圖7中的工件進行模擬抓取,得到圖8中工件圖像,通過對比可以發現,原始的工件圖像都能通過仿射變換得到與模板圖像(如圖4)相同的方向,驗證了改進的SIFT算法在視覺引導對工件位姿信息獲取的可行性。

圖7 原始的工件圖像

圖8 仿射變換后的工件圖像
4 結論
本文針對SIFT算法特征提取效率低的問題,提出了改進的SIFT算法,直接在原圖上進行高斯尺度空間計算,以圖像輪廓重心為旋轉重心,通過與模板圖像提取的特征點逐個匹配,并通過仿射變換與模板圖像計算重合度,以重合度最高的匹配為最佳匹配。實驗最后采集了33張工件輪廓圖像作為樣本和一張模板圖像,使用改進的SIFT算法測試樣本中的工件輪廓與模板輪廓進行配準,計算了仿射變換的參數,并通過仿射變換把提取的工件的輪廓變換到了與模板圖像相同的位姿,實驗表明,該算法的特征提取速度比原來的SIFT算法提高了近10倍,也能完成視覺引導中對工件位姿的計算。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
艦船科學技術(2022年15期)2022-09-14 09:21:50
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年19期)2018-11-14 02:37:08
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
自動化學報(2017年11期)2017-04-04 02:52:58
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
