大型柔性航天器的高精度結(jié)構(gòu)化綜合控制
2022-11-16 14:09:24馮煥龐愛平周鴻博周俊杰朱輝孟范偉
科學(xué)技術(shù)與工程 2022年29期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
馮煥, 龐愛平*, 周鴻博, 周俊杰, 朱輝, 孟范偉
(1.貴州大學(xué)電氣工程學(xué)院, 貴陽(yáng) 550025; 2. 東北大學(xué)秦皇島分校控制工程學(xué)院, 秦皇島 066004)
隨著航天事業(yè)的飛速發(fā)展,加之復(fù)合材料技術(shù)的發(fā)展與在航天領(lǐng)域的廣泛應(yīng)用,使航天器的結(jié)構(gòu)日益趨近大型化、柔性化,呈現(xiàn)出多系統(tǒng)模態(tài)的特點(diǎn)。這些弱阻尼的柔性諧振模態(tài)使系統(tǒng)傳遞函數(shù)的幅值特性呈現(xiàn)大幅度的變化,系統(tǒng)本身的柔性模態(tài)又大大限制了帶寬的選擇(即魯棒穩(wěn)定性),同時(shí)復(fù)雜的發(fā)射環(huán)境和在軌運(yùn)行時(shí)的高空環(huán)境帶來的固有低頻擾動(dòng)對(duì)航天器的穩(wěn)定性和性能造成了干擾,輕則造成性能下降,無法完成任務(wù)要求,重則導(dǎo)致航天器控制失穩(wěn)甚至墜落。
同時(shí),隨著航天器承載任務(wù)的日益多樣化,對(duì)大型航天器的指向精度要求也愈加苛刻。既要抑制復(fù)雜空間環(huán)境所帶來的外部干擾和航天器固有的低頻諧振干擾,又要滿足“高指向精度”的性能要求,同時(shí)還要兼顧系統(tǒng)的姿態(tài)穩(wěn)定性、帶寬限制,是此類大型柔性航天器控制設(shè)計(jì)的難點(diǎn)。
以往的研究表明,具有多重性能要求的柔性系統(tǒng)的控制問題,很難采用經(jīng)典的分析方法來平衡多性能的要求,經(jīng)典的控制設(shè)計(jì)方案往往不能兼顧系統(tǒng)的高精度要求和魯棒性能[1-5]。H∞控制理論是可以將多個(gè)性能要求都考慮在設(shè)計(jì)中的綜合控制理論,適用于此類具有多重性能要求的綜合控制問題。目前對(duì)于柔性航天器穩(wěn)態(tài)運(yùn)行中的振動(dòng)控制問題采用的控制方法主要如下。
一是基于分布式和分散觀測(cè)器的容錯(cuò)控制[6]方案,利用循環(huán)小增益定理保證了撓性航天器的閉環(huán)穩(wěn)定性,此外簡(jiǎn)化了柔性航天器的系統(tǒng)模型,大大降低了柔性航天器容錯(cuò)控制理論分析和工程實(shí)踐的難度。
二是采用隔振技術(shù)降低高頻振動(dòng)和非線性反饋控制使相對(duì)姿態(tài)收斂到最小的綜合控制[7],滿足了柔性航天器相對(duì)姿態(tài)高精度、高穩(wěn)定性的要求。
三是基于圖論的魯棒協(xié)同控制[8]方案,設(shè)計(jì)了用于柔性結(jié)構(gòu)形狀保持的一致性控制器,克服環(huán)境干擾和其他系統(tǒng)不確定性的影響,提高了系統(tǒng)的容錯(cuò)性和魯棒性。
四是實(shí)現(xiàn)高精度的姿態(tài)控制和振動(dòng)抑制的魯棒自適應(yīng)控制[9]以及復(fù)合干擾觀測(cè)器和H∞控制方法[10]等,該方案能準(zhǔn)確估計(jì)外部主干擾并將其抑制,提高了系統(tǒng)的穩(wěn)定性。但在實(shí)踐中,由于包含多種不確定性,會(huì)降低姿態(tài)控制器的性能,須在后續(xù)進(jìn)一步考慮研究。
雖然傳統(tǒng)的魯棒H∞控制設(shè)計(jì)具有綜合多重性能要求的優(yōu)點(diǎn),但其在工程應(yīng)用上也存在局限性[11],其主要問題是控制器階次高。階次高結(jié)構(gòu)復(fù)雜的控制器不僅實(shí)現(xiàn)起來的代價(jià)是很高的,并且在工程實(shí)踐應(yīng)用中,還需要根據(jù)經(jīng)驗(yàn)將復(fù)雜的控制器分解成多個(gè)低復(fù)雜度的控制結(jié)構(gòu)來實(shí)現(xiàn),這是一項(xiàng)極大的挑戰(zhàn)[12-13],導(dǎo)致了傳統(tǒng)H∞控制器在實(shí)際中難以實(shí)現(xiàn)。近年來,Gahinet等[11]、Apkarian等[12-14]提出了一種新的綜合控制理論,這種新的綜合控制方法的設(shè)計(jì)思路是:首先根據(jù)實(shí)際需求和控制目標(biāo),預(yù)先設(shè)計(jì)好控制器的結(jié)構(gòu)(單一結(jié)構(gòu)化控制器、單環(huán)路多控制器協(xié)同、多環(huán)路的控制結(jié)構(gòu)),再根據(jù)控制對(duì)象的具體性能要求,通過加權(quán)函數(shù)限制輸出性能,構(gòu)建含有多維性能輸出綜合性能矩陣,最后對(duì)這個(gè)含有固定結(jié)構(gòu)的控制器進(jìn)行參數(shù)優(yōu)化,得到最優(yōu)參數(shù)的結(jié)構(gòu)化H∞控制器[15]。其中,權(quán)函數(shù)的設(shè)計(jì)顯得尤為關(guān)鍵,如何選取合適的參數(shù)使性能到達(dá)最優(yōu)也成為許多學(xué)者研究的熱點(diǎn)問題[16]。
相較傳統(tǒng)的H∞綜合控制方法,結(jié)構(gòu)化綜合控制方法既保留了傳統(tǒng)H∞控制的優(yōu)點(diǎn),又突破了傳統(tǒng)H∞控制的限制,既避免傳統(tǒng)魯棒綜合控制多重性能耦合牽制設(shè)計(jì)的問題,又能以低階的低復(fù)雜度的控制滿足多重性能要求,自從被提出就得到了廣泛的關(guān)注和應(yīng)用[11-19]。
現(xiàn)針對(duì)攜帶大型太陽(yáng)能帆板的柔性航天器綜合控制問題,在傳統(tǒng)綜合控制的思路下,采用多控制協(xié)同的結(jié)構(gòu)化設(shè)計(jì)方案。在控制器結(jié)構(gòu)的設(shè)計(jì)上,首先,充分考慮系統(tǒng)的諧振模態(tài)特性,加入內(nèi)模控制器以增強(qiáng)系統(tǒng)的魯棒性,減小系統(tǒng)本身的柔性結(jié)構(gòu)帶來的諧振影響;同時(shí),根據(jù)運(yùn)行環(huán)境的擾動(dòng)特征,串聯(lián)陷波濾波器以針對(duì)性的抑制外部干擾;以低復(fù)雜度的結(jié)構(gòu)化控制器保證系統(tǒng)的多重性能要求,綜上通過多控制模塊的協(xié)同控制來實(shí)現(xiàn)綜合控制目標(biāo),給出既滿足綜合性能要求,又相較傳統(tǒng)綜合控制復(fù)雜度低的結(jié)構(gòu)化控制器,以減小實(shí)際應(yīng)用的實(shí)施難度。
1 系統(tǒng)模型和控制目標(biāo)
攜帶大型柔性附件的航天器如圖1所示,主要由提供能量的太陽(yáng)帆板,提供航天器的姿態(tài)數(shù)據(jù)信息速率陀螺儀、精密制導(dǎo)傳感器、星跟蹤器和用于動(dòng)量管理的反作用輪、電磁扭矩器,以及一臺(tái)數(shù)字計(jì)算機(jī)組成。

圖1 柔性航天器
在構(gòu)建仿真模型時(shí),僅考慮受抖動(dòng)影響最大的、也是整個(gè)系統(tǒng)中最重要的俯仰軸模型。其控制框圖如圖2所示。延時(shí)環(huán)節(jié)的引入是為了表征控制器輸出到執(zhí)行器之間的時(shí)間差;速率陀螺儀則用一個(gè)二階振蕩環(huán)節(jié)表示;反作用輪存在2.5 N·m的執(zhí)行器飽和限制;相關(guān)符號(hào)所代表的含義及參數(shù)選擇如表1所示。

表1 相關(guān)符號(hào)含義及其參數(shù)

ZOH為零階保持器
俯仰軸模型可以由一個(gè)剛體模型和若干個(gè)柔性模塊組成,表達(dá)式為

(1)
式(1)中:Ki為第i個(gè)柔性模塊的柔性增益,i=1,2,…,9;wi為第i個(gè)柔性模塊的柔性頻率。
在控制結(jié)構(gòu)框圖中,采用的柔性航天器含有9個(gè)柔性模態(tài),相關(guān)參數(shù)如表2所示。

表2 柔性結(jié)構(gòu)增益和頻率參數(shù)值
系統(tǒng)的開環(huán)頻率特性如圖3所示,從Bode圖上可知,截止頻率wc僅為0.16 Hz,截止頻率極低系統(tǒng)的帶寬很小,干擾抑制性能很差。

圖3 無控制系統(tǒng)下的Bode圖
柔性航天器在其復(fù)雜的運(yùn)行環(huán)境中,這就要求系統(tǒng)具有良好的控制性能。所設(shè)計(jì)的控制器應(yīng)能夠有效解決太陽(yáng)能帆板的擾動(dòng)抑制、系統(tǒng)固有柔性抑制問題,同時(shí)具有一定量的帶寬并且滿足高指向精度要求。
具體控制要求如下。
(1)帶寬限制。要求具有1.5 Hz左右的系統(tǒng)帶寬。
(2)擾動(dòng)抑制。在14 Hz時(shí),對(duì)系統(tǒng)柔性結(jié)構(gòu)提供至少6 dB的增益抑制,在0.12 Hz和0.66 Hz時(shí)的擾動(dòng),至少提供20 dB的附加干擾衰減,保持相角裕度20°以上。
2 控制設(shè)計(jì)
所建立的被控對(duì)象模型無法精確表示實(shí)際系統(tǒng)的特性。綜合控制的目的是針對(duì)被控對(duì)象實(shí)際存在的未建模動(dòng)態(tài)特性、參數(shù)攝動(dòng)變化、不可預(yù)測(cè)擾動(dòng)輸入等不確定因素,保證系統(tǒng)具有魯棒穩(wěn)定性的條件下同時(shí)通過頻域整形方法設(shè)計(jì)系統(tǒng)來滿足性能要求。
2.1 標(biāo)準(zhǔn)H∞控制問題
H∞設(shè)計(jì)時(shí)一般都是將設(shè)計(jì)問題整理成一般標(biāo)準(zhǔn)形式的H∞優(yōu)化問題,也稱為標(biāo)準(zhǔn)問題。
標(biāo)準(zhǔn)問題中的對(duì)象稱為廣義對(duì)象G(s)。廣義對(duì)象有兩個(gè)輸出,一個(gè)是表示性能要求的加權(quán)輸出z,另一個(gè)是加到控制器上去的輸出y。z可能是某一種數(shù)學(xué)上定義的信號(hào)向量,而y則是真實(shí)存在的,是能測(cè)量到的輸出信號(hào)向量。廣義對(duì)象的輸入也是兩個(gè),一個(gè)是作用于對(duì)象上的所有外輸入,用向量w表示,另一個(gè)是控制器輸出作用到對(duì)象上的控制輸入向量u。廣義對(duì)象G(s)加上控制器K(s)構(gòu)成了標(biāo)準(zhǔn)問題中的系統(tǒng),如圖4所示。

圖4 H∞標(biāo)準(zhǔn)問題框圖
H∞標(biāo)準(zhǔn)問題是指求解一真有理的控制器K,使從w到z的傳遞函數(shù)矩陣的H∞范數(shù)最小,而極小化的約束條件使K鎮(zhèn)定G[20]。
相比較一般的H∞設(shè)計(jì),結(jié)構(gòu)化綜合控制設(shè)計(jì)的不同在于其控制器是預(yù)先設(shè)計(jì)好的具有固定結(jié)構(gòu)的模塊,標(biāo)準(zhǔn)的結(jié)構(gòu)化綜合控制設(shè)框圖如圖5所示。

圖5 標(biāo)準(zhǔn)結(jié)構(gòu)化綜合控制框圖
圖5包含兩個(gè)部分,其一是H∞設(shè)計(jì)中具有固定參數(shù)的廣義傳遞函數(shù)G(s),即[wu]到[zy]的傳遞函數(shù);其二是包含所有可調(diào)參數(shù)的結(jié)構(gòu)化控制器C(s),C(s)為包含多個(gè)控制模塊的對(duì)角矩陣,即
由于政府及企業(yè)相關(guān)部門對(duì)企業(yè)內(nèi)部控制工作不夠重視,導(dǎo)致相關(guān)產(chǎn)業(yè)、科學(xué)技術(shù)、人才等方面發(fā)展緩慢,這也是我國(guó)企業(yè)內(nèi)部控制工作建設(shè)經(jīng)驗(yàn)不足的主要原因之一。由于企業(yè)不夠重視,相關(guān)工作就難以推進(jìn),企業(yè)內(nèi)部控制工作大部分仍憑借傳統(tǒng)的人工方式進(jìn)行操作,在企業(yè)內(nèi)部資料處理中會(huì)出現(xiàn)遺漏、損壞等問題,導(dǎo)致整個(gè)工作進(jìn)程拖延,對(duì)整個(gè)企業(yè)的發(fā)展造成了不必要的損失,不利于企業(yè)內(nèi)部控制工作效率的提高,無法與時(shí)代的腳步相契合。企業(yè)對(duì)于人才的利用效率不高,控制體系管理人才供不應(yīng)求,企業(yè)只好引進(jìn)外來優(yōu)秀專業(yè)技能人才,導(dǎo)致人才投入成本較高,企業(yè)控制體系管理成本也增高。
C(s)=diag[C1(s)C2(s) …Cn(s)]
(2)
控制器中的每一個(gè)控制器C(s),j=1,2,…,n都是一個(gè)預(yù)定結(jié)構(gòu)的可調(diào)塊。這個(gè)固定的結(jié)構(gòu)控制模塊可以是任意的形式,包括復(fù)雜的超前與滯后控制器,但是基于優(yōu)化的控制結(jié)構(gòu)需要盡可能地簡(jiǎn)單。
與標(biāo)準(zhǔn)H∞設(shè)計(jì)的理念相同,結(jié)構(gòu)化綜合設(shè)計(jì)的目標(biāo)也是求取H∞控制器使得系統(tǒng)輸入輸出的傳遞函數(shù)的H∞范數(shù)達(dá)最小。
2.2 性能分析及加權(quán)設(shè)計(jì)
大型柔性航天器控制的主要問題是,系統(tǒng)具有多個(gè)低頻的諧振模態(tài),這些諧振模態(tài)使幅值特性呈現(xiàn)大幅度的變化,同時(shí)復(fù)雜的發(fā)射環(huán)境和在軌運(yùn)行時(shí)的高空環(huán)境帶來的固有低頻干擾,與系統(tǒng)本身的柔性模態(tài)又大大限制了帶寬的選擇。
要求權(quán)函數(shù)的選擇即要抑制系統(tǒng)所固有的低頻諧振擾動(dòng),又要達(dá)到高的指向精度,還要綜合考慮這個(gè)柔性系統(tǒng)的帶寬限制(即魯棒性)、穩(wěn)定程度等綜合性能要求。
設(shè)T1為r-e的傳遞函數(shù),系統(tǒng)的穩(wěn)定程度即傳遞函數(shù)T1到臨界穩(wěn)定點(diǎn)的距離,也是跟蹤性能的增益上限,要求即為
‖W1(s)T1(s)‖∞≤γ
(3)
式(3)中:γ為范數(shù)指標(biāo);W1(s)為加權(quán)函數(shù)。設(shè)計(jì)穩(wěn)定裕度的上限為1,即W1(s)=1。
設(shè)T2為d-θ的傳遞函數(shù),即系統(tǒng)的魯棒穩(wěn)定性要求為
‖W2(s)T2(s)‖∞≤γ
(4)
式(4)中:加權(quán)函數(shù)W2(s)=0.8。
設(shè)T3為r-θ的傳遞函數(shù),系統(tǒng)的帶寬要求為
‖W3(s)T3(s)‖∞≤γ
(5)
為限定系統(tǒng)的帶寬,可將加權(quán)函數(shù)選為如式(6)的高通濾波形式,其頻率特性如圖6所示。
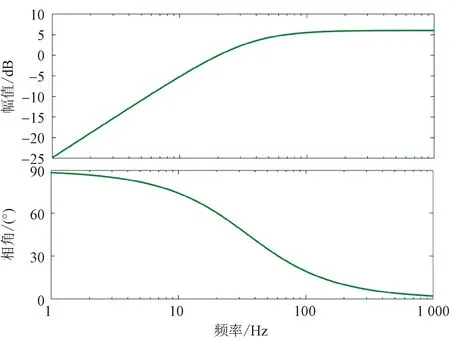
圖6 權(quán)函數(shù)W3(s)的開環(huán)Bode圖

(6)
2.3 標(biāo)準(zhǔn)H∞控制問題
2.3.1 標(biāo)準(zhǔn)H∞控制器
運(yùn)用2.2節(jié)的權(quán)函數(shù),利用MATLAB中的hinfsyn函數(shù),經(jīng)過反復(fù)的計(jì)算迭代,最終得到γ=8.125時(shí),得出的H∞控制器為表達(dá)式為

(7)
式(7)中:分子中多項(xiàng)式s2+0.000 360 5s+0.002 128和分母中多項(xiàng)式s2+0.000 22s+0.002 118形成的零點(diǎn)和極點(diǎn)相距很近,可以視作兩對(duì)偶極子,因此可以將其對(duì)消掉。再將分母中引入的微小攝動(dòng)量0.01去掉,最終簡(jiǎn)化后的H∞控制器表達(dá)式為

(8)
此時(shí)K′h(s)為圖2柔性航天器系統(tǒng)結(jié)構(gòu)框圖中的控制器C(s)。可以看出為了達(dá)到綜合性能指標(biāo)要求,標(biāo)準(zhǔn)的H∞控制器階次高且結(jié)構(gòu)復(fù)雜,這給實(shí)際工程應(yīng)用中帶來了極大的挑戰(zhàn)。于是給出一種更適用于實(shí)際工程應(yīng)用、可預(yù)先設(shè)定控制器結(jié)構(gòu)及階次的結(jié)構(gòu)化綜合控制方法。
2.3.2 結(jié)構(gòu)化控制器
結(jié)構(gòu)化綜合控制設(shè)計(jì)首先基于結(jié)構(gòu)化的H∞控制問題,預(yù)先設(shè)計(jì)含參的控制器結(jié)構(gòu),這個(gè)控制器的結(jié)構(gòu)可以是單一的低階控制器,或多控制模塊協(xié)同的控制器結(jié)構(gòu),需要根據(jù)控制目標(biāo)分析系統(tǒng)的結(jié)構(gòu)來設(shè)計(jì);然后,分析系統(tǒng)的性能要求,根據(jù)控制目標(biāo)來選擇加權(quán)函數(shù)以保證每個(gè)性能的要求,構(gòu)建含參的加權(quán)的解耦輸出矩陣;最后根據(jù)性能要求和選定的加權(quán)函數(shù),求得一個(gè)滿足多重性能要求的最優(yōu)控制器參數(shù)。
針對(duì)上述控制目標(biāo),結(jié)合本例中系統(tǒng)的柔性模態(tài)和固有的擾動(dòng)頻率。給出多控制模塊協(xié)同的結(jié)構(gòu)化綜合控制策略,根據(jù)系統(tǒng)特定的諧振模態(tài),在控制器結(jié)構(gòu)中加入內(nèi)模控制器、陷波濾波器、串聯(lián)比例-積分-微分(proportion-integration-differentiation,PID)控制器,以低階的結(jié)構(gòu)化控制器來滿足系統(tǒng)的多重性能的要求;設(shè)計(jì)如圖7所示的結(jié)構(gòu)化綜合控制器。

圖7 控制系統(tǒng)框圖
圖7中下面紅色虛線框內(nèi)為這個(gè)系統(tǒng)的結(jié)構(gòu)化控制器,其中S(s)、R(s)模塊是固定參數(shù)的,其他模塊是可調(diào)參數(shù)的,這個(gè)結(jié)構(gòu)化綜合控制器由三部分組成。
1)內(nèi)模控制器
針對(duì)系統(tǒng)的諧振模態(tài)所設(shè)計(jì)的抑制諧振擾動(dòng)的內(nèi)模控制器S(s)表達(dá)式為

(9)
其頻率特性如圖8所示,其目的是針對(duì)14 Hz處的系統(tǒng)振動(dòng),通過增加系統(tǒng)的阻尼,來達(dá)到減小系統(tǒng)振動(dòng)的目的。

圖8 內(nèi)模控制器S(s)的Bode圖
2)陷波濾波器
針對(duì)空間環(huán)境的擾動(dòng)特性設(shè)置的陷波濾波器R(s),以保證對(duì)0.12 Hz和0.66 Hz太陽(yáng)能帆板的擾動(dòng),在不影響系統(tǒng)中頻段穩(wěn)定性的前提下,系統(tǒng)應(yīng)該能夠?qū)υ摂_動(dòng)提供足夠的抑制的作用,其Bode如圖9所示。

圖9 陷波濾波器R(s)的Bode圖


(10)
3)PID控制器
針對(duì)保證系統(tǒng)姿態(tài)穩(wěn)定所設(shè)的可調(diào)參數(shù)PID控制器,這個(gè)PID控制器的速率路徑加有一個(gè)FIR濾波用來提供一定的增益抑制。
綜合考慮系統(tǒng)的性能要求和控制器的實(shí)現(xiàn)成本問題,設(shè)計(jì)如式(11)所示的控制器。
K(s)=KP(1+KI/s+KDs)R(s)S(s)
(11)
式(11)中:KP、KI、KD為待優(yōu)化參數(shù)。
對(duì)于已設(shè)計(jì)好控制器結(jié)構(gòu)和加權(quán)函數(shù)的結(jié)構(gòu)化H∞優(yōu)化問題,綜合考慮柔性系統(tǒng)的控制性能要求,通過優(yōu)化可調(diào)參數(shù)KP、KI、KD得到滿足式(12)的最小γ值為
‖H‖∞≤γ
(12)
在求取結(jié)構(gòu)化H∞控制器中的最優(yōu)參數(shù)時(shí),將式(3)~式(5)中的T1、T2、T3應(yīng)用線性分式變換(linear fractional transformation,LFT)[17-19]提取含有參數(shù)的結(jié)構(gòu)化控制器C,以線性分式形式P1、P2、P3來進(jìn)行參數(shù)優(yōu)化,即

(13)
針對(duì)結(jié)構(gòu)化控制器C(s)中含有分子分母參數(shù)耦合的問題,對(duì)于任意的有理傳函R(a)都可以轉(zhuǎn)化生成一個(gè)線性分式變化的形式,即
R(a)=Fl(M,a?I)
(14)
式(14)中:M為R(a)的線性分式變換;a為可調(diào)參數(shù);符號(hào)?為克羅內(nèi)克積,表示兩個(gè)矩陣間的運(yùn)算。所以圖5所示的標(biāo)準(zhǔn)結(jié)構(gòu)化綜合控制設(shè)計(jì)可轉(zhuǎn)換為如圖10所示的LFT標(biāo)準(zhǔn)形式進(jìn)行優(yōu)化設(shè)計(jì)。轉(zhuǎn)換后就不再存在耦合的問題。

圖10 LFT模型
經(jīng)過反復(fù)的迭代計(jì)算得到圖7中的結(jié)構(gòu)化控制器的最優(yōu)參數(shù)如下:KP=8,KI=0.5,KD=0.95。
最終得到的結(jié)構(gòu)化綜合控制器為
K(s)=8(1+0.5/s+0.95s)R(s)S(s)
(15)
3 仿真分析
圖11為系統(tǒng)開環(huán)頻域的Bode圖。根據(jù)圖11可知系統(tǒng)的截至頻率約為1.6 Hz,滿足了不低于1.5 Hz的帶寬要求。同時(shí)針對(duì)高頻諧振模塊的振動(dòng)抑制,提供了超過100 dB的增益抑制。所以所設(shè)計(jì)的結(jié)構(gòu)化綜合控制器在抑制固有諧振干擾的同時(shí),又能滿足一定的帶寬要求。

圖11 系統(tǒng)開環(huán)Bode圖
在設(shè)計(jì)的結(jié)構(gòu)化綜合控制器下,系統(tǒng)的時(shí)域響應(yīng)和控制器輸出分別如圖12和圖13所示,可以看出,在不超過反作用輪2.5 N·m的執(zhí)行器飽和限制下所設(shè)計(jì)的控制器能夠?yàn)?.12 Hz和0.66 Hz的抖動(dòng)提供了遠(yuǎn)超過20 dB的增益衰減,滿足了振動(dòng)抑制和指向精度的要求。圖14為系統(tǒng)的閉環(huán)Bode圖也剛好證明了這一點(diǎn)。

圖12 系統(tǒng)的時(shí)域響應(yīng)

圖13 控制器輸出

圖14 系統(tǒng)閉環(huán)Bode圖
由圖15所示的時(shí)域響應(yīng)可知,在同樣的加權(quán)函數(shù)下,兩種控制器均可在一定時(shí)間內(nèi),完全抑制太陽(yáng)能帆板擾動(dòng)的影響,達(dá)到所需要的控制性能指標(biāo)要求具有穩(wěn)定性。在結(jié)構(gòu)化綜合控制的作用下,系統(tǒng)的超調(diào)量為2.101%、峰值時(shí)間為0.711 s,調(diào)節(jié)時(shí)間13.562 s。而傳統(tǒng)H∞控制器的超調(diào)量為2.31%、峰值時(shí)間為0.876 s,調(diào)節(jié)時(shí)間為14.227 s。可知結(jié)構(gòu)化綜合控制在動(dòng)態(tài)性能指標(biāo)上明顯優(yōu)于傳統(tǒng)的H∞控制切控制器的階次更低,在針對(duì)0.12 Hz和0.66 Hz的柔性結(jié)構(gòu)振動(dòng)具有非常好的抑制效果。

圖15 結(jié)構(gòu)化綜合和傳統(tǒng)H∞控制下的時(shí)域響應(yīng)仿真對(duì)比
4 結(jié)論
針對(duì)攜帶大型柔性附件的航天器所面臨的帶寬不足、系統(tǒng)指向性精度低、柔性結(jié)構(gòu)振動(dòng)等綜合性控制問題,采用了結(jié)構(gòu)化綜合控制器的實(shí)際方案,通過選擇適當(dāng)?shù)募訖?quán)函數(shù),最終提出了一個(gè)滿足控制要求的結(jié)構(gòu)化控制器。根據(jù)仿真表明,此控制器能夠有效抑制大型柔性附件在0.12 Hz和0.66 Hz時(shí)的振動(dòng)問題,在保證高指向精度的同時(shí),又能兼顧姿態(tài)穩(wěn)定性、帶寬等要求。相比較傳統(tǒng)的H∞控制器,結(jié)構(gòu)化控制器具有復(fù)雜程度低、系統(tǒng)階次較低、工程造價(jià)和實(shí)施難度都比較低的優(yōu)點(diǎn),且所提供的控制性能更佳。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17