數(shù)據(jù)驅(qū)動(dòng)的應(yīng)用自適應(yīng)技術(shù)綜述
2022-11-12 11:28:50涂志瑩
計(jì)算機(jī)研究與發(fā)展 2022年11期
代 浩 金 銘 陳 星 李 楠 涂志瑩 王 洋
1(中國(guó)科學(xué)院深圳先進(jìn)技術(shù)研究院 廣東深圳 518055) 2(福州大學(xué)計(jì)算機(jī)與大數(shù)據(jù)學(xué)院 福州 350108) 3(哈爾濱工業(yè)大學(xué)計(jì)算機(jī)科學(xué)與技術(shù)學(xué)院 哈爾濱 150006)
應(yīng)用自適應(yīng)一直是軟件工程和服務(wù)計(jì)算中的一個(gè)熱點(diǎn)問(wèn)題,Laddaga[1]和Salehie等人[2]給出了自適應(yīng)相對(duì)精確的定義:“自適應(yīng)系統(tǒng)旨在通過(guò)調(diào)整各種組件或?qū)傩裕皂憫?yīng)自身或是環(huán)境的變化.這里的自身是指軟件系統(tǒng),而環(huán)境則是指包含操作環(huán)境中影響系統(tǒng)行為和屬性的一切因素.因此自適應(yīng)系統(tǒng)是一個(gè)包含了自身和環(huán)境反饋的閉環(huán)系統(tǒng).”
傳統(tǒng)軟件自適應(yīng)往往討論的是單個(gè)軟件程序的自適應(yīng)過(guò)程,但當(dāng)今大數(shù)據(jù)時(shí)代的信息系統(tǒng)往往相當(dāng)復(fù)雜,已經(jīng)不再是一個(gè)以獨(dú)立應(yīng)用為主體的系統(tǒng),而是以多個(gè)應(yīng)用間的協(xié)同來(lái)實(shí)現(xiàn)一個(gè)服務(wù)的系統(tǒng),所以本文中討論的自適應(yīng)應(yīng)用是一個(gè)相對(duì)廣義上的服務(wù)計(jì)算系統(tǒng),如云服務(wù)系統(tǒng)、智慧家居系統(tǒng)、智慧交通系統(tǒng)、人臉識(shí)別系統(tǒng)等,這類系統(tǒng)往往具有多流程、多組件、多模態(tài)、分布式等特點(diǎn),因此通過(guò)自適應(yīng)可調(diào)整的功能空間非常巨大、也更加復(fù)雜.因此,傳統(tǒng)的軟件自適應(yīng)系統(tǒng)(self-adaptive systems, SAS)主要從軟件的需求、結(jié)構(gòu)、行為、環(huán)境等方面考慮如何實(shí)現(xiàn)自適應(yīng),通過(guò)因果網(wǎng)絡(luò)、時(shí)序邏輯、概率模型以及控制論等方法,對(duì)系統(tǒng)和環(huán)境進(jìn)行建模和規(guī)劃.這些方法大部分基于軟件代碼或組件層面,在軟件設(shè)計(jì)和軟件配置過(guò)程中實(shí)現(xiàn)自適應(yīng)模塊.本文中我們則重點(diǎn)關(guān)注的是大型系統(tǒng)的環(huán)境感知和自適應(yīng)規(guī)劃,側(cè)重于從系統(tǒng)的流程、資源等方面實(shí)現(xiàn)自適應(yīng)管理系統(tǒng),利用這些分布式系統(tǒng)中的大量日志數(shù)據(jù)等實(shí)現(xiàn)自適應(yīng)感知和規(guī)劃.以一個(gè)典型的智慧家居應(yīng)用為例,應(yīng)用將在用戶設(shè)定的鬧鐘前30 min自動(dòng)關(guān)閉空調(diào),并開(kāi)始煮咖啡,當(dāng)咖啡煮好之后,打開(kāi)臥室的燈光,并播放音樂(lè)喚醒用戶,接著在用戶離開(kāi)臥室之后自動(dòng)關(guān)閉燈光,并開(kāi)始播放新聞.可以看出,這樣一個(gè)基礎(chǔ)的應(yīng)用是由多個(gè)不同的流程組合而成,這些流程是可以按照一定的規(guī)則重新組合的.同時(shí),這個(gè)應(yīng)用所處的環(huán)境是充滿了不確定性的,如用戶提前起床、家里停水等,如何針對(duì)這種非確定性的運(yùn)行環(huán)境來(lái)對(duì)流程進(jìn)行自適應(yīng),是本文重點(diǎn)探討的目標(biāo).
自適應(yīng)發(fā)生在對(duì)運(yùn)行環(huán)境中發(fā)生的事件的反應(yīng)中,應(yīng)用可以在運(yùn)行時(shí)改變自身流程,以便在不同的情況下為用戶提供高效、便捷的功能.系統(tǒng)需要自適應(yīng)的原因有很多,如用戶環(huán)境的狀態(tài)發(fā)生改變,需要不同的交互模式;由于服務(wù)調(diào)用失敗,導(dǎo)致應(yīng)用不再可用;由于臨時(shí)的高計(jì)算負(fù)載,計(jì)算設(shè)備的資源條件發(fā)生了變化等.現(xiàn)代信息系統(tǒng),包括物流分單系統(tǒng)、高頻交易系統(tǒng)、交通調(diào)度系統(tǒng)、自動(dòng)駕駛系統(tǒng)等,這些系統(tǒng)的特點(diǎn)是需要持續(xù)保持運(yùn)行態(tài),一旦服務(wù)宕機(jī)則將會(huì)造成難以估量的損失.對(duì)于物流、金融等應(yīng)用場(chǎng)景的應(yīng)用故障可能會(huì)造成直接的經(jīng)濟(jì)損失,而對(duì)于一些工業(yè)、交通等場(chǎng)景,甚至可能造成更嚴(yán)重的后果.而且,這些系統(tǒng)面對(duì)的場(chǎng)景是復(fù)雜多變的,比如物流系統(tǒng)中不規(guī)范的用戶輸入、交通調(diào)度中異常的行駛車輛等,更普遍的是,由于這些系統(tǒng)往往集成了以物聯(lián)網(wǎng)為代表的移動(dòng)計(jì)算設(shè)備以及各種各樣的傳感器,導(dǎo)致大大增加了監(jiān)測(cè)設(shè)備故障和復(fù)雜網(wǎng)絡(luò)帶來(lái)的環(huán)境異常風(fēng)險(xiǎn).這些風(fēng)險(xiǎn)在系統(tǒng)設(shè)計(jì)階段往往是難以預(yù)見(jiàn)的,所以如何在保障系統(tǒng)在正常運(yùn)行的前提下,通過(guò)自適應(yīng)技術(shù)使得系統(tǒng)面對(duì)異常故障也能提供穩(wěn)定魯棒的正常服務(wù),是現(xiàn)代信息系統(tǒng)中亟待解決的問(wèn)題.
簡(jiǎn)而言之,應(yīng)用的自適應(yīng)旨在自動(dòng)做出決策,使用戶不必手動(dòng)地將應(yīng)用程序從一種操作模式切換到另一種操作模式.傳統(tǒng)自適應(yīng)往往需要預(yù)定義規(guī)則,而對(duì)于如今廣義的復(fù)雜系統(tǒng),人工預(yù)設(shè)規(guī)則意味著巨大的工作量.與此同時(shí),預(yù)設(shè)規(guī)則式自適應(yīng)需要事先嵌入靜態(tài)的自適應(yīng)邏輯,其只能對(duì)固定范圍內(nèi)的環(huán)境變化做出反應(yīng),對(duì)于超出范圍的環(huán)境變化則缺乏適應(yīng)性.此外,這種方法需要設(shè)計(jì)者具備一定的專業(yè)領(lǐng)域知識(shí),往往只能解決特定問(wèn)題,泛化能力較弱.為了解決這些問(wèn)題,數(shù)據(jù)驅(qū)動(dòng)的方法近年來(lái)越來(lái)越受研究人員的重視.數(shù)據(jù)驅(qū)動(dòng)并不依賴于系統(tǒng)的數(shù)學(xué)模型或?qū)<抑R(shí),而是用數(shù)理統(tǒng)計(jì)和機(jī)器學(xué)習(xí)等方法來(lái)挖掘離線和在線數(shù)據(jù)中隱含的有用信息,提升自適應(yīng)系統(tǒng)的適用范圍和在線規(guī)劃能力,形成自動(dòng)化的決策模型.數(shù)據(jù)驅(qū)動(dòng)的應(yīng)用自適應(yīng)系統(tǒng)具有感知性、適應(yīng)性、自治性和協(xié)作性四大特點(diǎn),對(duì)于系統(tǒng)的不確定性具有更強(qiáng)魯棒性.
1 自適應(yīng)驅(qū)動(dòng)技術(shù)
應(yīng)用自適應(yīng)可以分為規(guī)則驅(qū)動(dòng)和數(shù)據(jù)驅(qū)動(dòng)2種類型[3].規(guī)則驅(qū)動(dòng)即是利用相應(yīng)的專家領(lǐng)域知識(shí)進(jìn)行數(shù)學(xué)建模,預(yù)先生成固定的規(guī)則模型來(lái)進(jìn)行應(yīng)用自適應(yīng);數(shù)據(jù)驅(qū)動(dòng)則不再依賴于已知的數(shù)學(xué)模型,而是直接從系統(tǒng)在線或離線的數(shù)據(jù)中獲取對(duì)應(yīng)的知識(shí),因此,其對(duì)系統(tǒng)的先驗(yàn)知識(shí)要求較少.規(guī)則驅(qū)動(dòng)與數(shù)據(jù)驅(qū)動(dòng)一個(gè)比較大的區(qū)別在于,規(guī)則驅(qū)動(dòng)的系統(tǒng)模型是已知且可以預(yù)設(shè)的,而數(shù)據(jù)驅(qū)動(dòng)往往將系統(tǒng)看作一個(gè)黑盒,算法并不關(guān)心系統(tǒng)內(nèi)部結(jié)構(gòu),而是通過(guò)輸入輸出數(shù)據(jù)訓(xùn)練出的數(shù)學(xué)模型來(lái)擬合系統(tǒng)模型.
1.1 規(guī)則驅(qū)動(dòng)
規(guī)則驅(qū)動(dòng)方法通常有2種:一種是方法通過(guò)標(biāo)準(zhǔn)的知識(shí)工程方法獲得的上下文知識(shí),然后根據(jù)所獲得的知識(shí),使用如基于邏輯的形式方法[4-5]來(lái)表示規(guī)則模型,將系統(tǒng)模型用抽象邏輯表示出來(lái),利用形式推理技術(shù)來(lái)針對(duì)環(huán)境改變進(jìn)行自適應(yīng)決策.由于在自適應(yīng)的過(guò)程中存在著大量的不確定性,因此通過(guò)邏輯推理的優(yōu)點(diǎn)在于可以將這種不確定性形式化為確定的邏輯表達(dá)式,從而執(zhí)行對(duì)應(yīng)的自適應(yīng)規(guī)則.基于這個(gè)思路,Cámara等人[6]提出了一種通過(guò)推理來(lái)實(shí)現(xiàn)有人類參與的系統(tǒng)自適應(yīng)技術(shù).由于人類參與者的行為受到很多外部因素(如疲勞度、熟練度等)的影響會(huì)為系統(tǒng)帶來(lái)很大的不確定性,Cámara等人通過(guò)顯式建模的方法,將人類參與者和系統(tǒng)交互的影響因素通過(guò)邏輯語(yǔ)言形式化地表示出來(lái),從而實(shí)現(xiàn)系統(tǒng)的自適應(yīng).進(jìn)一步地,Cámara等人在另一篇文獻(xiàn)[5]中還提出了一種形式化分析技術(shù)來(lái)量化考慮感知不確定性的潛在好處,并結(jié)合形式推理技術(shù)來(lái)改進(jìn)不確定性產(chǎn)生的影響.這種基于邏輯表達(dá)的方法雖然有著優(yōu)秀的可解釋性和魯棒性,但是對(duì)系統(tǒng)設(shè)計(jì)者的要求較高,并且需要結(jié)合一定的專業(yè)領(lǐng)域背景知識(shí),因此難以被廣泛應(yīng)用.
另一種方法則是基于本體的建模方法,使用基于標(biāo)記語(yǔ)言的本體來(lái)描述相關(guān)的上下文知識(shí)[7],應(yīng)用從本體檢索到的知識(shí)來(lái)分析環(huán)境更改造成的影響,從而創(chuàng)建一個(gè)適應(yīng)計(jì)劃來(lái)響應(yīng)變更.從近幾年的文獻(xiàn)來(lái)看,基于本體建模方法因?yàn)榫哂幸话阈院涂蓮?fù)用的特點(diǎn),所以更受到研究者們的青睞[7-9].基于本體建模的自適應(yīng)方法,需要針對(duì)特定的應(yīng)用領(lǐng)域開(kāi)發(fā)本體,來(lái)作為交互應(yīng)用模塊中機(jī)器可理解的知識(shí)庫(kù).運(yùn)行時(shí)決策模塊根據(jù)本體和收集到的信息推斷出新的事實(shí),執(zhí)行對(duì)系統(tǒng)變化(包括外部環(huán)境變化或內(nèi)部狀態(tài)更改等)的反應(yīng)操作,如重新配置、申請(qǐng)資源、流程修改等,從而實(shí)現(xiàn)應(yīng)用的自適應(yīng).這種方法被廣泛運(yùn)用于各種自適應(yīng)場(chǎng)景中,例如Chen等人[7]提出了一種基于知識(shí)驅(qū)動(dòng)的智慧家居活動(dòng)識(shí)別方法,該方法使用了基于描述邏輯的標(biāo)記語(yǔ)言來(lái)構(gòu)建本體,本體可以被看作是通過(guò)基于活動(dòng)屬性在活動(dòng)和上下文信息之間建立聯(lián)系的模型,該模型對(duì)傳感器數(shù)據(jù)和活動(dòng)進(jìn)行統(tǒng)一的本體建模和表示,不僅方便了領(lǐng)域知識(shí)的重用,而且允許利用語(yǔ)義推理進(jìn)行活動(dòng)識(shí)別.同樣,Evesti等人[8]也提出了一個(gè)用于安全自適應(yīng)的本體建模方法,與Chen等人提出的方法不同的是,這個(gè)方法將知識(shí)從自適應(yīng)架構(gòu)中分離出來(lái),同時(shí)給出了從架構(gòu)到知識(shí)的映射,由于本體本身包含了自適應(yīng)的知識(shí),這種安全自適應(yīng)方法不需要為分析和規(guī)劃階段做規(guī)則的硬編碼.Zhou等人[9]則將基于本體的建模方法應(yīng)用在工業(yè)控制領(lǐng)域,使用本體建模集成了一個(gè)知識(shí)驅(qū)動(dòng)的自適應(yīng)控制模塊來(lái)監(jiān)測(cè)和分析應(yīng)用的變化,實(shí)現(xiàn)系統(tǒng)的自適應(yīng),開(kāi)發(fā)人員通過(guò)特定領(lǐng)域模型來(lái)構(gòu)建控制系統(tǒng)的邏輯和功能,然后根據(jù)知識(shí)庫(kù)上的語(yǔ)義查詢?cè)鰪?qiáng)的Web規(guī)則語(yǔ)言(semantic query-enhanced Web rule language, SQWRL)查詢自動(dòng)推斷癥狀和動(dòng)作請(qǐng)求,實(shí)現(xiàn)了一個(gè)用于自動(dòng)重新配置的工業(yè)控制系統(tǒng).但是這種方法通常是預(yù)先計(jì)算和設(shè)計(jì)好了相關(guān)的領(lǐng)域知識(shí),并不能隨著應(yīng)用的運(yùn)行進(jìn)行自動(dòng)化學(xué)習(xí),因此Huang等人[10]根據(jù)軟件定義網(wǎng)絡(luò)(software defined network, SDN)的設(shè)計(jì)原則和上下文認(rèn)知過(guò)程,提出了一種上下文驅(qū)動(dòng)的智慧家居控制機(jī)制(smart home control mechanism, SHCM),通過(guò)將機(jī)器學(xué)習(xí)(machine learning, ML)算法和本體模型集成到上下文認(rèn)知過(guò)程中,提高了智慧家居控制系統(tǒng)的上下文感知自動(dòng)化水平.該機(jī)制通過(guò)挖掘不同感知應(yīng)用中固有的多屬性上下文特征,建立隱含的聚類和關(guān)聯(lián)規(guī)則,并利用本體模型實(shí)現(xiàn)自動(dòng)化的集成上下文管理,智能家居設(shè)備通過(guò)上下文驅(qū)動(dòng)的控制策略在數(shù)據(jù)層實(shí)現(xiàn)上下文反饋.
規(guī)則驅(qū)動(dòng)模型語(yǔ)義清晰,表示方法統(tǒng)一,無(wú)冷啟動(dòng)問(wèn)題,能建立可重用的模型,方便擴(kuò)展到規(guī)模更大的環(huán)境中.但是,雖然規(guī)則驅(qū)動(dòng)的方法具有較好的穩(wěn)定性,卻不能處理不確定性問(wèn)題,它們使用的是基于一般知識(shí)的推理,如模糊邏輯和概率推理,而不是通過(guò)歷史數(shù)據(jù)來(lái)進(jìn)行統(tǒng)計(jì)分析,因此基于這類方法的自適應(yīng)系統(tǒng)對(duì)于實(shí)時(shí)環(huán)境變化的敏感性較差,但是可解釋性較好.
1.2 數(shù)據(jù)驅(qū)動(dòng)
與規(guī)則驅(qū)動(dòng)方法相比,數(shù)據(jù)驅(qū)動(dòng)方法的強(qiáng)大之處在于其可以利用實(shí)時(shí)產(chǎn)生的海量數(shù)據(jù),來(lái)獲取系統(tǒng)的動(dòng)態(tài)反饋,并據(jù)此進(jìn)行建模.數(shù)據(jù)驅(qū)動(dòng)方法將數(shù)據(jù)進(jìn)行組織形成信息,之后對(duì)相關(guān)的信息進(jìn)行整合和提煉,在數(shù)據(jù)的基礎(chǔ)上經(jīng)過(guò)訓(xùn)練和擬合形成自動(dòng)化的決策模型,當(dāng)有新的數(shù)據(jù)輸入、產(chǎn)生新情況時(shí)系統(tǒng)用之前擬合形成的模型和人工智能的方式直接進(jìn)行決策,因此數(shù)據(jù)驅(qū)動(dòng)方法具有更好的魯棒性和適應(yīng)性[11].
目前主流的數(shù)據(jù)驅(qū)動(dòng)方法主要是利用了機(jī)器學(xué)習(xí)從數(shù)據(jù)中建模,其中經(jīng)典的監(jiān)督學(xué)習(xí)方法有2種:一種是生成方法,它試圖建立輸入或數(shù)據(jù)空間的完整描述,通常使用諸如用于活動(dòng)建模的Markov模型[12]和貝葉斯網(wǎng)絡(luò)[13]等概率分析方法.使用生成模型的好處在于可以為系統(tǒng)環(huán)境進(jìn)行建模,方便對(duì)系統(tǒng)環(huán)境進(jìn)行深入的分析,并設(shè)計(jì)出更加高效和可解釋的自適應(yīng)方法,例如將系統(tǒng)狀態(tài)的變遷擬合為一個(gè)Markov決策過(guò)程(Markov decision process, MDP),從而挖掘出不同系統(tǒng)狀態(tài)之間的關(guān)聯(lián).這種概率表示的方法有效降低了為復(fù)雜環(huán)境交互建模的難度,但同時(shí)也存在一個(gè)缺點(diǎn),即每次環(huán)境變化時(shí)都需要重新構(gòu)造MDP.因此,Moreno等人[14-15]提出了一種在離線時(shí)構(gòu)造MDP、在線時(shí)通過(guò)隨機(jī)動(dòng)態(tài)規(guī)劃進(jìn)行自適應(yīng)決策的方法,這種方法顯著地減少了在數(shù)據(jù)量級(jí)上自適應(yīng)的運(yùn)行時(shí)間,并保證自適應(yīng)的結(jié)果一致.構(gòu)造MDP是需要在對(duì)于系統(tǒng)狀態(tài)有全面了解的前提下設(shè)計(jì)的,事實(shí)上大部分情況下設(shè)計(jì)者并不能獲得所有的環(huán)境信息,因此Paucar等人[16]提出了使用部分可觀測(cè)的Markov決策過(guò)程(partially observable Markov decision process, POMDP)對(duì)系統(tǒng)進(jìn)行建模的方法,根據(jù)監(jiān)測(cè)模塊的數(shù)據(jù)結(jié)合貝葉斯推理來(lái)生成和更新POMDP模型,進(jìn)而支撐系統(tǒng)自適應(yīng),這種方法擺脫了需要對(duì)運(yùn)行環(huán)境整體進(jìn)行建模的前提,因而更具有現(xiàn)實(shí)意義和實(shí)用價(jià)值.當(dāng)然,這些方法都是通過(guò)調(diào)整概率模型參數(shù)的初始值來(lái)實(shí)現(xiàn)預(yù)測(cè),所以主要缺點(diǎn)是模型在概率變量配置方面是靜態(tài)和主觀的.另一種則是判別方法,它只對(duì)從輸入數(shù)據(jù)到輸出活動(dòng)標(biāo)簽的映射建模,判別方法包括許多分類方法,例如k近鄰(k-nearest neighbor, KNN)[17]、決策樹(shù)(decision tree, DT)[18]、支持向量機(jī)(support vector machine, SVM)[19]等.Li等人[20]基于數(shù)據(jù)驅(qū)動(dòng)方法設(shè)計(jì)了一個(gè)對(duì)于個(gè)人健康活動(dòng)進(jìn)行規(guī)劃和建議的自適應(yīng)應(yīng)用,通過(guò)聚類算法從歷史數(shù)據(jù)中識(shí)別出典型的活動(dòng)模式以及目標(biāo),結(jié)合歷史數(shù)據(jù)的周期性預(yù)測(cè)目標(biāo)是否能夠?qū)崿F(xiàn),然后對(duì)實(shí)時(shí)數(shù)據(jù)應(yīng)用線性二次型調(diào)節(jié)器(linear quadratic regulator, LQR)算法實(shí)現(xiàn)活動(dòng)流程的自適應(yīng)調(diào)整.Muccini等人[21]則提出了一種在基于機(jī)器學(xué)習(xí)的物聯(lián)網(wǎng)架構(gòu)中執(zhí)行主動(dòng)自適應(yīng)的方法,該方法利用長(zhǎng)短期記憶(long short-term memory, LSTM)[22]算法對(duì)長(zhǎng)時(shí)依賴的敏感性,從傳感器的日志數(shù)據(jù)中識(shí)別出物聯(lián)網(wǎng)架構(gòu)中不同組件的模式來(lái)優(yōu)化系統(tǒng)的服務(wù)質(zhì)量(quality of service, QoS).Bao等人[23]針對(duì)分布式機(jī)器學(xué)習(xí)的工作負(fù)載中不同作業(yè)的放置問(wèn)題,提出一種深度學(xué)習(xí)(deep learning, DL)驅(qū)動(dòng)的機(jī)器學(xué)習(xí)集群調(diào)度器,該調(diào)度器使用深度神經(jīng)網(wǎng)絡(luò)(deep neural network, DNN)對(duì)獎(jiǎng)勵(lì)值進(jìn)行建模,構(gòu)建了一個(gè)輔助獎(jiǎng)勵(lì)預(yù)測(cè)模型,然后實(shí)現(xiàn)了基于深度強(qiáng)化學(xué)習(xí)(deep reinforcement learning, DRL)框架的自適應(yīng)調(diào)度器,實(shí)驗(yàn)表明這種調(diào)度器的性能優(yōu)于一些典型的傳統(tǒng)調(diào)度器.
數(shù)據(jù)驅(qū)動(dòng)方法雖然具有處理時(shí)間信息和空間信息不確定性的能力,但大多需要大量訓(xùn)練和學(xué)習(xí)數(shù)據(jù)集來(lái)建立預(yù)測(cè)模型,因此會(huì)出現(xiàn)“數(shù)據(jù)不足”或“冷啟動(dòng)”問(wèn)題.不幸的是,數(shù)據(jù)不足仍是目前廣泛存在于真實(shí)世界系統(tǒng)中的一大問(wèn)題.
1.3 小 結(jié)
規(guī)則驅(qū)動(dòng)與數(shù)據(jù)驅(qū)動(dòng)的對(duì)比如表1所示.雖然數(shù)據(jù)驅(qū)動(dòng)比規(guī)則驅(qū)動(dòng)需要更少的專家領(lǐng)域知識(shí),實(shí)現(xiàn)上也更為簡(jiǎn)單,但卻不能避免冷啟動(dòng)的問(wèn)題;而規(guī)則驅(qū)動(dòng)技術(shù)可用于預(yù)測(cè),并遵循基于描述的方法來(lái)建模傳感器數(shù)據(jù)和活動(dòng)之間的關(guān)系,但它不能很好地處理不確定性問(wèn)題和時(shí)間信息,所以有許多研究是結(jié)合了數(shù)據(jù)驅(qū)動(dòng)與規(guī)則驅(qū)動(dòng)這兩者的優(yōu)點(diǎn)來(lái)實(shí)現(xiàn)的.

Table 1 Comparison Between Rule-Driven and Data-Driven表1 規(guī)則驅(qū)動(dòng)與數(shù)據(jù)驅(qū)動(dòng)對(duì)比
例如Gayathri等人[24]提出了一種利用Markov邏輯網(wǎng)絡(luò)(Markov logic network, MLN)將概率推理集成到領(lǐng)域本體中,將統(tǒng)計(jì)學(xué)習(xí)方法與本體論相結(jié)合,將語(yǔ)義轉(zhuǎn)換為一階規(guī)則,并利用數(shù)據(jù)學(xué)習(xí)規(guī)則的權(quán)值,從而提高活動(dòng)識(shí)別的精度.還有一種結(jié)合方式是在初始階段以規(guī)則驅(qū)動(dòng)建模,再利用數(shù)據(jù)驅(qū)動(dòng)方法來(lái)對(duì)自適應(yīng)系統(tǒng)進(jìn)行調(diào)整優(yōu)化.如Sukor等人[25]提出的一種將規(guī)則驅(qū)動(dòng)與數(shù)據(jù)驅(qū)動(dòng)推理相結(jié)合的方法,使活動(dòng)模型能夠根據(jù)用戶的特性自演化和自適應(yīng).該方法首先使用基于規(guī)則驅(qū)動(dòng)的活動(dòng)模型推理方法作為初始模型,然后使用數(shù)據(jù)驅(qū)動(dòng)技術(shù)對(duì)模型進(jìn)行訓(xùn)練,生成一個(gè)動(dòng)態(tài)活動(dòng)模型來(lái)學(xué)習(xí)用戶的各種操作.該方法在一些公共數(shù)據(jù)集進(jìn)行了評(píng)估,實(shí)驗(yàn)結(jié)果表明與其他模型相比,學(xué)習(xí)活動(dòng)模型獲得了更高的識(shí)別率.受此工作啟發(fā),Wang等人[26]將在線強(qiáng)化學(xué)習(xí)與歷史決策庫(kù)相結(jié)合,基于軟件定義的方式,實(shí)現(xiàn)了城域網(wǎng)中虛擬服務(wù)的高效自適應(yīng)遷移,以更低的成本和更高的QoS滿足用戶的服務(wù)請(qǐng)求.因此,一種比較合理的結(jié)合方式,在數(shù)據(jù)驅(qū)動(dòng)的自適應(yīng)框架中引入部分包含先驗(yàn)知識(shí)的規(guī)則驅(qū)動(dòng)方法作為補(bǔ)充.
2 自適應(yīng)框架
作為一種有效地處理系統(tǒng)復(fù)雜性、不確定性和動(dòng)態(tài)性的系統(tǒng),自適應(yīng)系統(tǒng)中有很多不同的框架來(lái)實(shí)現(xiàn),如觀察—定向—決策—行動(dòng)(observe-orient-decide-act, OODA)[27]、知識(shí)密集型數(shù)據(jù)處理系統(tǒng)(knowledge intensive data processing system, KIDS)[28-29]框架等.這些框架大多都包含了一些關(guān)鍵的模塊,如評(píng)估、規(guī)劃等,當(dāng)然,目前最有影響力的參考控制模型是通過(guò)MAPE-K(monitor-analyze-plan-execute knowledge)來(lái)實(shí)現(xiàn)的[30],相對(duì)于KIDS,MAPE-K多加了一個(gè)知識(shí)庫(kù),用于存儲(chǔ)自適應(yīng)的相關(guān)知識(shí)規(guī)則.MAPE-K是一個(gè)由“監(jiān)測(cè)—分析—決策—執(zhí)行—知識(shí)”組成的循環(huán)序列,這些組件分別用于分析監(jiān)控?cái)?shù)據(jù)、規(guī)劃響應(yīng)動(dòng)作、執(zhí)行這些動(dòng)作,這種閉環(huán)控制具有更好的適應(yīng)性和魯棒性,可以使系統(tǒng)在變化不確定的運(yùn)行環(huán)境下自適應(yīng)運(yùn)行,MAPE-K的框架結(jié)構(gòu)如圖1所示.MAPE-K的框架目前廣泛應(yīng)用于各種自適應(yīng)系統(tǒng)中,包括軟件自適應(yīng)[30]、智能家居自適應(yīng)[31-32]、工作流自適應(yīng)[33]、云計(jì)算自適應(yīng)[34-35]等.
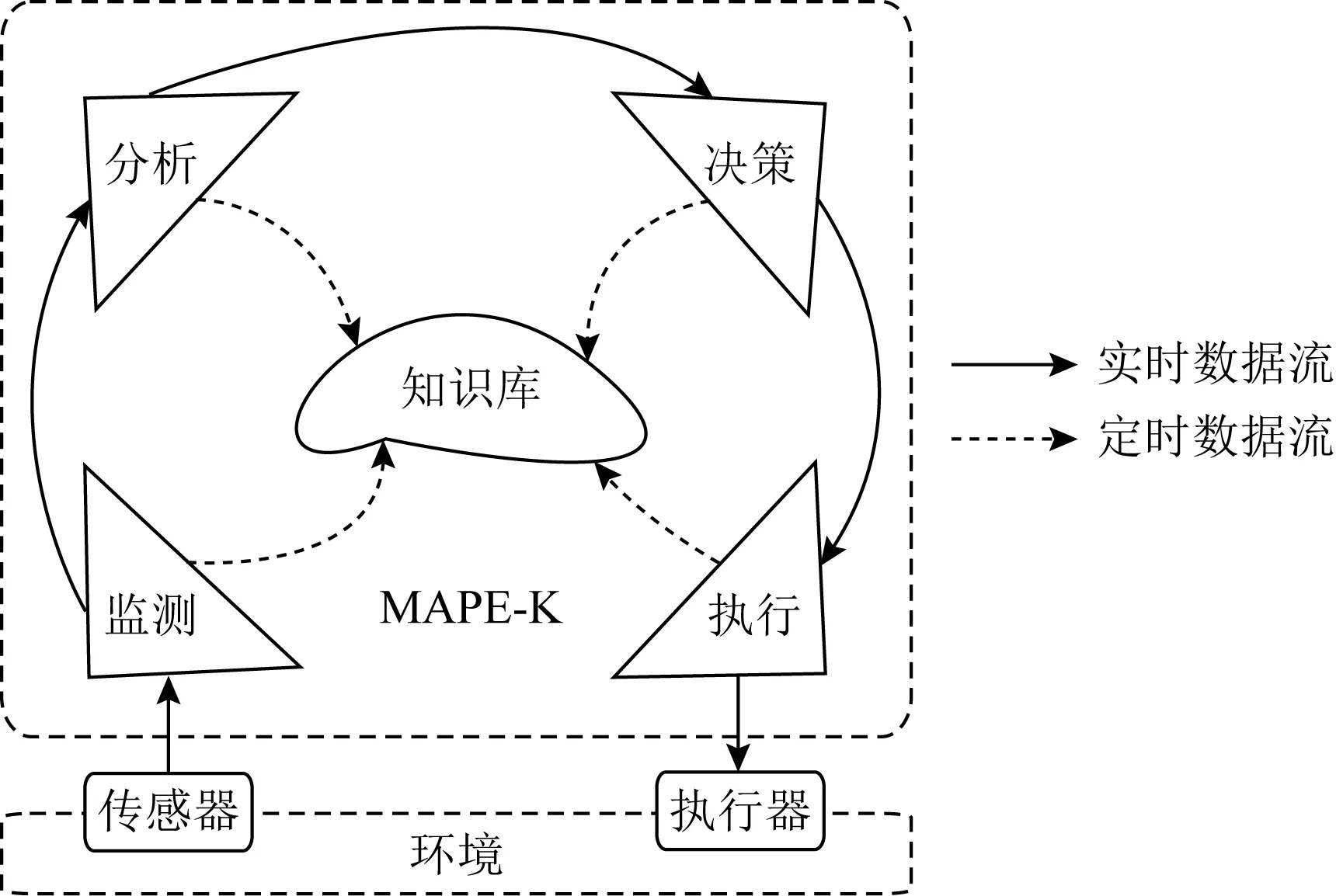
Fig. 1 MAPE-K architecture圖1 MAPE-K架構(gòu)
自適應(yīng)是指在環(huán)境或自身發(fā)生變化時(shí),對(duì)自身進(jìn)行規(guī)劃和調(diào)整.然而,一個(gè)重要而又容易被忽略的問(wèn)題是,對(duì)于連續(xù)的監(jiān)測(cè)結(jié)果來(lái)說(shuō),這種變化什么時(shí)候需要自適應(yīng)系統(tǒng)做出調(diào)整(即是否存在一個(gè)監(jiān)測(cè)值的臨界點(diǎn),導(dǎo)致自適應(yīng)系統(tǒng)需要對(duì)應(yīng)地做出調(diào)整).除此之外,決定啟動(dòng)自適應(yīng)的時(shí)間點(diǎn)也是非常重要的,因?yàn)椴煌瑫r(shí)間點(diǎn)做出規(guī)劃的效率會(huì)隨著環(huán)境的變化而變化,隨之而來(lái)的是成本的變化,例如計(jì)劃延遲會(huì)導(dǎo)致額外的資源、能源消耗等.因此Chen等人[36]設(shè)計(jì)的自適應(yīng)框架DLDA(debt learning driven adaptation)中,創(chuàng)新性地加入了一個(gè)二分類器,用于判別什么時(shí)候執(zhí)行自適應(yīng)調(diào)整.DLDA的架構(gòu)如圖2所示,分類器(classifier)根據(jù)前一個(gè)狀態(tài)和當(dāng)前狀態(tài)判斷出是否需要自適應(yīng),需要?jiǎng)t利用規(guī)劃器(planner)進(jìn)行自適應(yīng)調(diào)整,不需要?jiǎng)t系統(tǒng)不進(jìn)行調(diào)整.
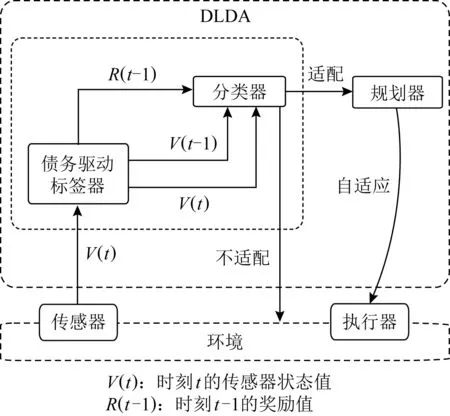
Fig. 2 DLDA architecture圖2 DLDA架構(gòu)
對(duì)于復(fù)雜的計(jì)算系統(tǒng),我們以一個(gè)實(shí)際的應(yīng)用場(chǎng)景來(lái)分析,在智能家居領(lǐng)域自適應(yīng)的應(yīng)用中,通過(guò)應(yīng)用的Log日志識(shí)別出各類活動(dòng)(或事件),這些活動(dòng)通過(guò)挖掘算法和機(jī)器學(xué)習(xí)方法使其在概念邏輯、時(shí)空方位上關(guān)聯(lián),由此導(dǎo)出不同場(chǎng)景的自適應(yīng)規(guī)則和事件圖譜(流程).在獲得規(guī)則模型和特征模型后,利用活動(dòng)的上下文語(yǔ)義關(guān)系及目標(biāo)-特征的耦合關(guān)系,建立特征對(duì)目標(biāo)的量化支撐函數(shù),最后再依照用戶的需求偏好,通過(guò)目標(biāo)-特征的最優(yōu)匹配(全局目標(biāo)最大化)綁定,完成對(duì)用戶活動(dòng)流程的自適應(yīng).
從圖1可以看出,數(shù)據(jù)驅(qū)動(dòng)的自適應(yīng)已經(jīng)不再是簡(jiǎn)單的“監(jiān)測(cè)—分析—決策—執(zhí)行”的循環(huán),而是一個(gè)極端復(fù)雜和智能的優(yōu)化過(guò)程.我們從認(rèn)知計(jì)算的理性思維適應(yīng)性控制(adaptive control of thought-rational, ACT-R)框架中得到了一些啟發(fā),ACT-R是卡內(nèi)基梅隆大學(xué)的Anderson等人[37]建立的一個(gè)人類認(rèn)知理論框架模型,其思路是在對(duì)環(huán)境進(jìn)行統(tǒng)計(jì)分析的基礎(chǔ)上,使得知識(shí)的獲得和調(diào)用過(guò)程隨環(huán)境而發(fā)生改變,實(shí)現(xiàn)系統(tǒng)的自適應(yīng)性,這正符合人類針對(duì)環(huán)境的自適應(yīng)認(rèn)知過(guò)程.ACT-R包含了對(duì)環(huán)境的感知和對(duì)數(shù)據(jù)模式的理解,并從中做出最優(yōu)的決策,而且認(rèn)知計(jì)算可以從大量數(shù)據(jù)中歸納出新的知識(shí),類似于人的認(rèn)知能力.
因此,我們認(rèn)為一個(gè)完整的數(shù)據(jù)驅(qū)動(dòng)應(yīng)用自適應(yīng)系統(tǒng)應(yīng)該包含4個(gè)功能:1)從復(fù)雜的環(huán)境中提取日志、圖像等數(shù)據(jù)特征;2)從數(shù)據(jù)特征中挖掘識(shí)別出環(huán)境和應(yīng)用的流程模式;3)識(shí)別出當(dāng)前的流程模式,進(jìn)行自適應(yīng)的適配;4)當(dāng)適配無(wú)法實(shí)現(xiàn)系統(tǒng)功能時(shí),需要對(duì)現(xiàn)有的規(guī)則進(jìn)行演化來(lái)補(bǔ)充支持系統(tǒng)的自適應(yīng).基于這4個(gè)功能,我們認(rèn)為一個(gè)自適應(yīng)框架應(yīng)該是如圖3所示的.
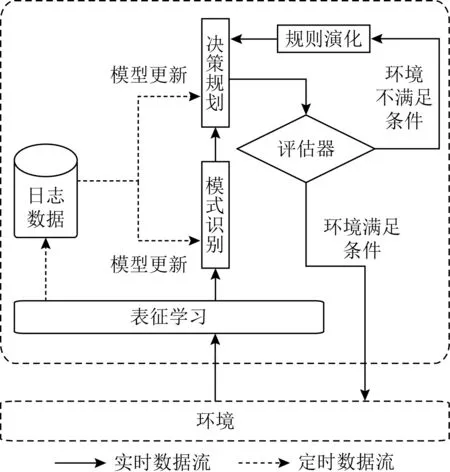
Fig. 3 The architecture of data-driven self-adaptive system圖3 數(shù)據(jù)驅(qū)動(dòng)的自適應(yīng)系統(tǒng)架構(gòu)
如圖3所示,應(yīng)用產(chǎn)生的傳感器數(shù)據(jù)通過(guò)表征學(xué)習(xí)模塊進(jìn)行預(yù)處理和特征提取;模式識(shí)別則負(fù)責(zé)從特征中識(shí)別出應(yīng)用的場(chǎng)景,理解用戶的活動(dòng)模式和意圖,并對(duì)正在進(jìn)行的活動(dòng)進(jìn)行監(jiān)測(cè)反饋;決策規(guī)劃模塊通過(guò)結(jié)合實(shí)時(shí)的特征、應(yīng)用的情景以及當(dāng)前活動(dòng)來(lái)對(duì)系統(tǒng)進(jìn)行動(dòng)態(tài)的自適應(yīng)調(diào)整;評(píng)估器將對(duì)產(chǎn)生的策略和環(huán)境進(jìn)行匹配,當(dāng)不匹配時(shí)調(diào)用規(guī)則演化模塊生成新規(guī)則以適應(yīng)當(dāng)前環(huán)境,匹配時(shí)則直接進(jìn)行執(zhí)行該策略;規(guī)則演化則是為了應(yīng)對(duì)數(shù)據(jù)不足或冷啟動(dòng),以及規(guī)則異常的問(wèn)題,通過(guò)引入部分專家知識(shí)或是其他領(lǐng)域知識(shí)來(lái)演化出新的規(guī)則.因此,接下來(lái)我們將分別介紹應(yīng)用自適應(yīng)框架中用到的這4種主要技術(shù):表征學(xué)習(xí)(represent learning)、模式識(shí)別(pattern recognition)、決策規(guī)劃(decision plan)、規(guī)則演化(rule evolution).
3 表征學(xué)習(xí)
原始數(shù)據(jù)一般是復(fù)雜異構(gòu)的,包含了如時(shí)空數(shù)據(jù)、圖片、語(yǔ)音等,這些原始數(shù)據(jù)通常具有異構(gòu)、稀疏、高秩等特點(diǎn),并不能直接提供給學(xué)習(xí)系統(tǒng)使用.因此,原始數(shù)據(jù)需要通過(guò)相應(yīng)的算法轉(zhuǎn)換為低秩的特征向量,剔除原始數(shù)據(jù)中冗余或無(wú)關(guān)的信息,提高機(jī)器學(xué)習(xí)預(yù)測(cè)或分類的性能效率,同時(shí)也加強(qiáng)了模型的可解釋性.表征學(xué)習(xí)通常包含數(shù)據(jù)清洗、特征提取、壓縮感知、多源融合等技術(shù),具有智能性、主動(dòng)性、自適應(yīng)性等特點(diǎn).
這種轉(zhuǎn)換根據(jù)是否需要人工干預(yù),可分為特征工程和表征學(xué)習(xí)2種.傳統(tǒng)的特征工程依賴于專家領(lǐng)域知識(shí)提取顯式的特征,因此人工工程量較大,選擇的特征質(zhì)量也將影響后續(xù)的任務(wù)質(zhì)量;表征學(xué)習(xí)則是自動(dòng)學(xué)習(xí)數(shù)據(jù)的隱式特征,并不依賴于專家經(jīng)驗(yàn),而是通過(guò)與后續(xù)任務(wù)進(jìn)行聯(lián)合訓(xùn)練來(lái)提取特征,其目標(biāo)不是通過(guò)學(xué)習(xí)原始數(shù)據(jù)預(yù)測(cè)某個(gè)觀察結(jié)果,而是學(xué)習(xí)數(shù)據(jù)的底層結(jié)構(gòu)(underlying structure, US),因此往往需要大量的數(shù)據(jù)集.對(duì)于高維且復(fù)雜的異構(gòu)數(shù)據(jù)(如圖片、視頻、文字、語(yǔ)音等),使用依賴人工的特征工程來(lái)提取特征顯然不太切合實(shí)際;而表征學(xué)習(xí)則借助算法使機(jī)器自動(dòng)地學(xué)習(xí)數(shù)據(jù)的特征,在大量的數(shù)據(jù)集下自動(dòng)的表征學(xué)習(xí)顯然更有效率.
最早的表征學(xué)習(xí)算法是1901年P(guān)earson[38]提出了主成分分析(principal component analysis, PCA)以及其衍生的一些變體,用線性投影的方法學(xué)習(xí)數(shù)據(jù)的低維度特征.這類算法被稱為無(wú)監(jiān)督表征學(xué)習(xí)算法,除PCA外還包含了無(wú)監(jiān)督字典學(xué)習(xí)(unsuper-vised dictionary learning, UDL)[39]、獨(dú)立成分分析(independent component analysis, ICA)[40]、自動(dòng)編碼(auto-encoders, AE)[41]和矩陣分解(matrix factorization, MF)[42]等.
與之相對(duì)的則是監(jiān)督式的表征學(xué)習(xí)算法,這類是目前更為通用的學(xué)習(xí)算法,如神經(jīng)網(wǎng)絡(luò)主要是指現(xiàn)在流行的深度學(xué)習(xí)方法[43].近年來(lái),深度學(xué)習(xí)的發(fā)展主要得益于3個(gè)方面巨大的進(jìn)步:表征學(xué)習(xí)、大規(guī)模數(shù)據(jù)集、通用圖形處理單元(general-purpose graphics processing unit, GPGPU)[44].深度學(xué)習(xí)以較好的通用性、自動(dòng)化等特性,正在自然語(yǔ)言處理、計(jì)算機(jī)視覺(jué)、語(yǔ)音識(shí)別、推薦系統(tǒng)等領(lǐng)域大展身手,其除了應(yīng)用于結(jié)構(gòu)化數(shù)據(jù)外,也適用于非結(jié)構(gòu)化數(shù)據(jù)的特征表示,表2中列舉了一些典型的數(shù)據(jù)表征學(xué)習(xí)算法.深度學(xué)習(xí)模型通常是“端到端”的,即沒(méi)有特定的區(qū)分表征學(xué)習(xí)和最終的學(xué)習(xí)任務(wù),實(shí)際上我們可以將模型中隱藏層的作用看作是在進(jìn)行表征學(xué)習(xí).
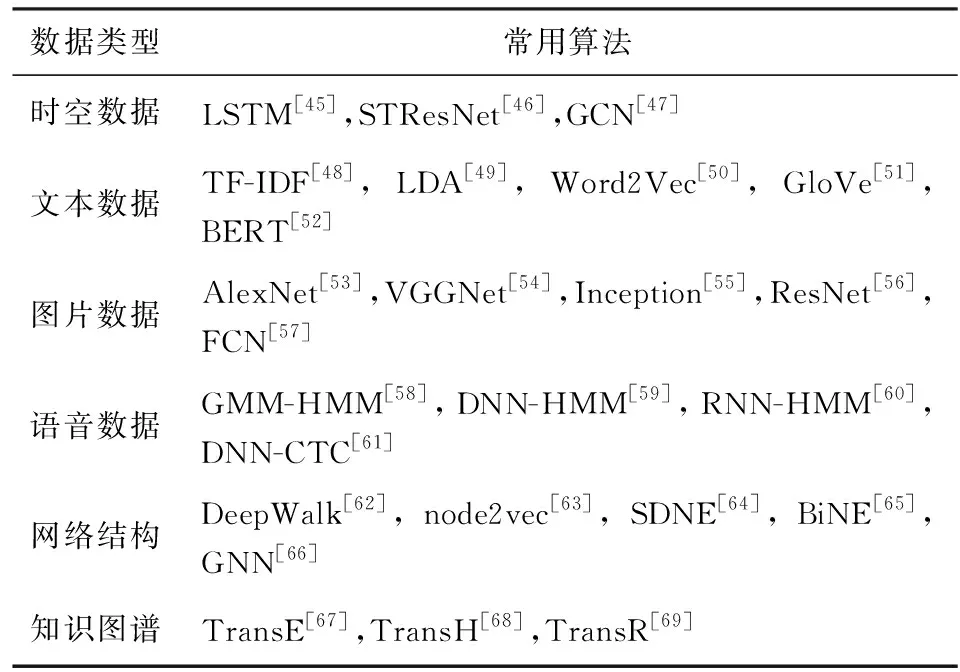
Table 2 Typical Represent Learning Algorithms表2 典型的表征學(xué)習(xí)算法
如表2所示,深度學(xué)習(xí)在非結(jié)構(gòu)化數(shù)據(jù)的表征學(xué)習(xí)中有著廣泛的應(yīng)用,這類算法可以從非結(jié)構(gòu)化數(shù)據(jù)中提取出有效的結(jié)構(gòu)化特征,用于支持后續(xù)如預(yù)測(cè)、分類等任務(wù).例如在圖像領(lǐng)域,原始的圖像存在大量無(wú)意義的像素點(diǎn),有效的應(yīng)該是圖像邊緣輪廓以及局部模式等,通過(guò)卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural network, CNN)等算法可以去除圖像的信息冗余,實(shí)現(xiàn)圖像分割和邊緣檢測(cè),提取出對(duì)應(yīng)的圖像特征,實(shí)現(xiàn)特征的高效壓縮,如Pan等人[70]使用空間卷積神經(jīng)網(wǎng)絡(luò)(spatial CNN, SCNN)來(lái)做交通場(chǎng)景圖像的理解,Rawat等人[71]也使用CNN提取圖像上下文信息來(lái)提升多標(biāo)簽分類的準(zhǔn)確率.深度神經(jīng)網(wǎng)絡(luò)還可以提取深層的高級(jí)表示,這使其更適合復(fù)雜的活動(dòng)識(shí)別任務(wù),其逐層結(jié)構(gòu)允許可伸縮地從簡(jiǎn)單到抽象的特征學(xué)習(xí),并且可分離性使得其可以靈活地組合成具有一個(gè)整體優(yōu)化功能的統(tǒng)一網(wǎng)絡(luò).這些優(yōu)勢(shì)使得深度學(xué)習(xí)目前在表征學(xué)習(xí)中占據(jù)著主導(dǎo)地位.
表征學(xué)習(xí)目前是一個(gè)比較活躍的領(lǐng)域,是機(jī)器感知和理解真實(shí)環(huán)境的重要技術(shù),其本質(zhì)是一種應(yīng)對(duì)高維數(shù)據(jù)的自動(dòng)化降維算法.隨著人工智能的發(fā)展,面對(duì)的數(shù)據(jù)開(kāi)始由原來(lái)的小規(guī)模、結(jié)構(gòu)化、規(guī)范化的數(shù)據(jù)集轉(zhuǎn)向大規(guī)模、非結(jié)構(gòu)化、繁冗的數(shù)據(jù)集,應(yīng)用場(chǎng)景也開(kāi)始轉(zhuǎn)向通用化、自動(dòng)化.因此,表征學(xué)習(xí)也開(kāi)始以深度學(xué)習(xí)為主,趨向于更加的普適、通用和更好的泛化能力.
4 模式識(shí)別
模式識(shí)別是一種用計(jì)算機(jī)模擬人類識(shí)別行為的技術(shù),可以讓計(jì)算機(jī)通過(guò)觀察環(huán)境,學(xué)習(xí)如何從環(huán)境中識(shí)別感興趣的模式,實(shí)現(xiàn)對(duì)環(huán)境模式的分類[72].模式識(shí)別的目的是從數(shù)據(jù)中挖掘出潛在的模式,數(shù)據(jù)包括地理位置、操作日志、時(shí)間序列等,我們將其分為識(shí)別上下文信息等的情景感知(context-aware)和挖掘用戶行為的活動(dòng)識(shí)別(activity recognition)2個(gè)模塊.
4.1 情景感知
情景感知技術(shù)最初是由Schilit等人[73]提出,又被稱為上下文感知,主要是指系統(tǒng)通過(guò)采集周圍環(huán)境參數(shù),對(duì)時(shí)間、空間元素進(jìn)行分析,實(shí)現(xiàn)對(duì)環(huán)境的感知和理解能力,自動(dòng)獲取和發(fā)現(xiàn)用戶需求,建立一種自適應(yīng)調(diào)整機(jī)制,向用戶提供適合當(dāng)前情形的信息或服務(wù),提高服務(wù)的準(zhǔn)確性和可靠性.對(duì)于一個(gè)復(fù)雜動(dòng)態(tài)的應(yīng)用系統(tǒng),情景感知可以根據(jù)從環(huán)境數(shù)據(jù)中提取的特征推理出系統(tǒng)運(yùn)行的上下文.
表征學(xué)習(xí)從原始數(shù)據(jù)中提取有效的特征,情景感知技術(shù)則根據(jù)這些特征對(duì)復(fù)雜多變的上下文進(jìn)行提取、融合、解釋和識(shí)別,推理出有用的實(shí)體狀態(tài)和動(dòng)態(tài)信息,指導(dǎo)決策系統(tǒng)提供正確、自適應(yīng)的服務(wù).情景推理可分為確定性推理和非確定性推理2類,確定性推理一般基于預(yù)設(shè)的情景,在傳統(tǒng)計(jì)算中取得了較好的效果;然而如今的上下文信息具有多樣性、不確定性和動(dòng)態(tài)性等特點(diǎn),因此更需要的是非確定性推理方法[74].
典型的情景推理方法有模糊推理、本體推理和D-S(Dempster-Shafer)證據(jù)推理等,此外,由于數(shù)據(jù)的不確定性和不完備性,所以機(jī)器學(xué)習(xí)方法也被廣泛應(yīng)用于復(fù)雜的情景推理中,包括人工神經(jīng)網(wǎng)絡(luò)、決策樹(shù)、隱Markov模型、KNN、貝葉斯網(wǎng)絡(luò)、支持向量機(jī)等.例如,在移動(dòng)計(jì)算領(lǐng)域,通過(guò)移動(dòng)端的定位數(shù)據(jù)、附近可見(jiàn)藍(lán)牙設(shè)備和WIFI接入點(diǎn)等數(shù)據(jù),結(jié)合聚類算法推理移動(dòng)端所處的場(chǎng)景,如家庭、辦公室、度假等[75].Rana等人[76]則設(shè)計(jì)了一個(gè)基于上下文的噪音映射系統(tǒng),通過(guò)對(duì)傳感器數(shù)據(jù)應(yīng)用KNN近鄰算法來(lái)推理智能手機(jī)的場(chǎng)景,如口袋、錢包或手持.我們將分別討論這些在情景推理中常用的算法.
1) 規(guī)則推理.通過(guò)IF-ELSE結(jié)構(gòu)來(lái)匹配合適的規(guī)則,進(jìn)行情景的推斷.規(guī)則的來(lái)源可以是基于專家知識(shí)預(yù)定義的,也可以是結(jié)合本體建模所產(chǎn)生的規(guī)則.這種方式實(shí)現(xiàn)簡(jiǎn)單、穩(wěn)定性好,但對(duì)于復(fù)雜多變的環(huán)境適應(yīng)性不足.
2) 本體推理.依賴于邏輯描述,通過(guò)本體建模數(shù)據(jù)實(shí)現(xiàn)推理.本體推理使用語(yǔ)義語(yǔ)言,如RDF(resource description framework),RDFS(RDF schema),OWL(Web ontology language)來(lái)實(shí)現(xiàn)推理,本體推理的優(yōu)點(diǎn)是可以與本體建模相結(jié)合.
3) 模糊邏輯.結(jié)合模糊集合和模糊規(guī)則進(jìn)行推理,相較于傳統(tǒng)邏輯,引入了更多處理不確定性和未知的能力.通常模糊邏輯與本體論、概率模型、規(guī)則推理結(jié)合在一起使用.
4) 概率邏輯.基于對(duì)事件概率和事實(shí)計(jì)算,運(yùn)用數(shù)理邏輯與概率理論對(duì)歸納邏輯、歸納方法進(jìn)行形式化、數(shù)量化的研究.通常利用D-S證據(jù)理論或隱Markov模型來(lái)進(jìn)行多源數(shù)據(jù)的融合,以及對(duì)下一個(gè)不確定狀態(tài)提供預(yù)測(cè)等.
5) 監(jiān)督學(xué)習(xí).通過(guò)收集標(biāo)記的應(yīng)用數(shù)據(jù)來(lái)進(jìn)行模型訓(xùn)練,訓(xùn)練好的模型將用于情景的推理.監(jiān)督學(xué)習(xí)被廣泛運(yùn)用于各種場(chǎng)景,各種模型也層出不窮,如貝葉斯網(wǎng)絡(luò)、支持向量機(jī)、決策樹(shù)以及目前炙手可熱的神經(jīng)網(wǎng)絡(luò)等,這些方法被應(yīng)用于模式識(shí)別、事件關(guān)聯(lián)等情景推理場(chǎng)景中.
6) 非監(jiān)督學(xué)習(xí).由于數(shù)據(jù)的標(biāo)記難以獲取,所以非監(jiān)督學(xué)習(xí)也常常用于無(wú)標(biāo)記的數(shù)據(jù)中,從中提取出一些有意義的結(jié)果.例如使用K-Means等聚類算法可以從數(shù)據(jù)中推理出一些相關(guān)上下文,或者對(duì)環(huán)境感知中獲取的數(shù)據(jù)進(jìn)行噪聲和離群點(diǎn)的檢測(cè)和區(qū)分.
以本體推理、模糊邏輯等為主的情景感知方法通常需要結(jié)合一定的專家知識(shí),以規(guī)則為導(dǎo)向進(jìn)行推理,這類方法的優(yōu)點(diǎn)是穩(wěn)定性好,但缺點(diǎn)也很明顯,即對(duì)于不確定的環(huán)境缺乏處理未知的能力.而使用機(jī)器學(xué)習(xí)的方法則脫離了對(duì)專家知識(shí)的依賴,模型幾乎完全來(lái)源于數(shù)據(jù)的模式,其優(yōu)點(diǎn)是模型可以處理未知的環(huán)境,從數(shù)據(jù)中挖掘出非預(yù)設(shè)的規(guī)則,而缺點(diǎn)則是穩(wěn)定性較差,生成的規(guī)則并不一定符合真實(shí)情況.目前的研究趨勢(shì)是機(jī)器學(xué)習(xí)方法與本體建模、模糊邏輯結(jié)合,實(shí)現(xiàn)混合推理模型.例如Roy等人[77]提出了使用結(jié)合本體預(yù)定義規(guī)則和貝葉斯網(wǎng)絡(luò)的模型來(lái)識(shí)別高層級(jí)的上下文情景,這種方式結(jié)合了數(shù)據(jù)融合和語(yǔ)義分析,從而促進(jìn)了情景識(shí)別的準(zhǔn)確率.
4.2 活動(dòng)識(shí)別
活動(dòng)識(shí)別是泛在計(jì)算、人類行為分析和人機(jī)交互研究的一個(gè)重要領(lǐng)域,其旨在通過(guò)對(duì)用戶行為和環(huán)境條件的觀察,識(shí)別出用戶的行為和目標(biāo)[78],并檢測(cè)出對(duì)應(yīng)的活動(dòng)模式.活動(dòng)識(shí)別可以看作是一個(gè)典型的模式識(shí)別問(wèn)題[79],通過(guò)從數(shù)據(jù)中識(shí)別出當(dāng)前的活動(dòng)模式,指導(dǎo)應(yīng)用程序預(yù)測(cè)下一步的流程,進(jìn)行一定的自適應(yīng)調(diào)整和規(guī)劃.活動(dòng)識(shí)別能更好地輔助計(jì)算機(jī)理解用戶目標(biāo)和意圖;幫助計(jì)算機(jī)應(yīng)用更智能化、適應(yīng)性地完成任務(wù),因此被廣泛應(yīng)用于各種互聯(lián)網(wǎng)領(lǐng)域,如廣告推薦、個(gè)性化定制、安全防控、運(yùn)動(dòng)監(jiān)測(cè)、醫(yī)療康復(fù)等.
傳統(tǒng)的活動(dòng)識(shí)別使用經(jīng)典的數(shù)學(xué)模型和數(shù)理統(tǒng)計(jì)來(lái)進(jìn)行建模分析,相對(duì)而言,數(shù)據(jù)挖掘和機(jī)器學(xué)習(xí)則能更有效地從數(shù)據(jù)中提取知識(shí)、發(fā)現(xiàn)知識(shí)和推理活動(dòng)[80].活動(dòng)識(shí)別的機(jī)器學(xué)習(xí)研究方法多種多樣,包括樸素貝葉斯(Naive Bayes)[81]、決策樹(shù)[82]、隱Markov模型(hidden Markov model, HMM)[83]、條件隨機(jī)場(chǎng)(conditional random field, CRF)[84]、KNN[85]、支持向量機(jī)[86]、集成學(xué)習(xí)(ensemble learning)等算法.
可以看出,活動(dòng)識(shí)別主要使用了分類算法,而深度學(xué)習(xí)作為機(jī)器學(xué)習(xí)的一個(gè)重要新分支,利用其對(duì)數(shù)據(jù)的高階特征建模分析的能力來(lái)挖掘用戶行為模式,也成為了活動(dòng)識(shí)別的一個(gè)重要趨勢(shì).正如介紹表征學(xué)習(xí)時(shí)所提到的,神經(jīng)網(wǎng)絡(luò)可以提取出數(shù)據(jù)間隱含的關(guān)聯(lián)關(guān)系.如CNN具有局部依賴性和尺度不變性,能捕獲數(shù)據(jù)的空間關(guān)聯(lián)[87];循環(huán)神經(jīng)網(wǎng)絡(luò)(recurrent neural network, RNN)則能結(jié)合時(shí)間層,獲取數(shù)據(jù)的時(shí)間序列信息[88].對(duì)于輸出層,深度學(xué)習(xí)的分類通常是用softmax回歸作為輸出,形式為

(1)
分類算法通常使用交叉驗(yàn)證技術(shù)來(lái)對(duì)模型進(jìn)行評(píng)估訓(xùn)練,常用的評(píng)價(jià)指標(biāo)的定義如表3所示,其中的一些符號(hào)定義如下:1)TP(true positive),將正類預(yù)測(cè)為正類;2)FN(false negative),將正類預(yù)測(cè)為負(fù)類;3)FP(false positive),將負(fù)類預(yù)測(cè)為正類;4)TN(true negative),將負(fù)類預(yù)測(cè)為負(fù)類.
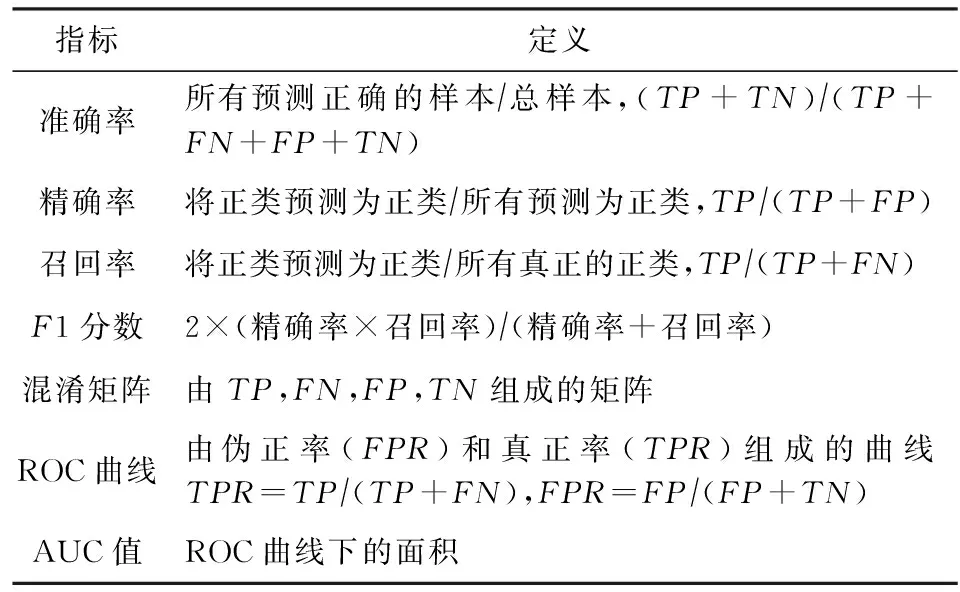
Table 3 Most Used Metrics for Classification表3 常用于分類的評(píng)價(jià)指標(biāo)
對(duì)于活動(dòng)識(shí)別來(lái)說(shuō),標(biāo)記數(shù)據(jù)對(duì)于模型訓(xùn)練是很重要的.利用標(biāo)記數(shù)據(jù)來(lái)訓(xùn)練模型,實(shí)現(xiàn)的活動(dòng)識(shí)別只能針對(duì)于已經(jīng)被標(biāo)記的活動(dòng).而實(shí)際環(huán)境中,能夠獲得的有標(biāo)記數(shù)據(jù)十分稀少,一個(gè)重要的挑戰(zhàn)便是從未標(biāo)記的數(shù)據(jù)中進(jìn)行活動(dòng)識(shí)別.對(duì)于稀少的標(biāo)記數(shù)據(jù)與未標(biāo)記數(shù)據(jù)混合的情況,通常采用半監(jiān)督學(xué)習(xí)來(lái)解決標(biāo)注缺少的問(wèn)題.半監(jiān)督學(xué)習(xí)通過(guò)對(duì)有標(biāo)注數(shù)據(jù)進(jìn)行預(yù)訓(xùn)練,然后對(duì)未標(biāo)注的數(shù)據(jù)進(jìn)行分類,得到帶有偽標(biāo)簽的數(shù)據(jù).對(duì)偽標(biāo)注數(shù)據(jù)進(jìn)行評(píng)估,從中挑選出可信的樣本加入訓(xùn)練集,提升分類精度.這類算法包括直推學(xué)習(xí)支持向量機(jī)(transductive support vector machine, TSVM)[89],半監(jiān)督支持向量機(jī)(semi-supervised support vector machine, S3VM)[90],圖論半監(jiān)督學(xué)習(xí)等.
而對(duì)于完全未標(biāo)記的數(shù)據(jù),則需要通過(guò)無(wú)監(jiān)督學(xué)習(xí)從訓(xùn)練集中識(shí)別出一些固有的模式,然后根據(jù)生成的模型,識(shí)別出這些固有模式.常用的無(wú)監(jiān)督學(xué)習(xí)有高斯混合模型(Gaussian mixture models, GMM)、層次凝聚聚類(hierarchical agglomerative clustering, HAC)、DBScan聚類、K-Means聚類等.通過(guò)聚類算法,可以將數(shù)據(jù)劃分為不同的簇,每個(gè)簇包含了一些特定的活動(dòng)模型,從而區(qū)分出一些頻繁重復(fù)的活動(dòng)模式.例如Gupta等人[91]設(shè)計(jì)了一個(gè)自適應(yīng)的活動(dòng)識(shí)別框架,該框架分為離線挖掘和在線識(shí)別2部分,離線挖掘通過(guò)聚類等算法從歷史數(shù)據(jù)中識(shí)別出一些頻繁的活動(dòng)模式;而在線識(shí)別則從離線挖掘的標(biāo)簽中訓(xùn)練出分類模型,來(lái)對(duì)在線數(shù)據(jù)進(jìn)行活動(dòng)的分類,從而實(shí)現(xiàn)實(shí)時(shí)的活動(dòng)識(shí)別.表4列出了一些在活動(dòng)識(shí)別中常用的公開(kāi)數(shù)據(jù)集.
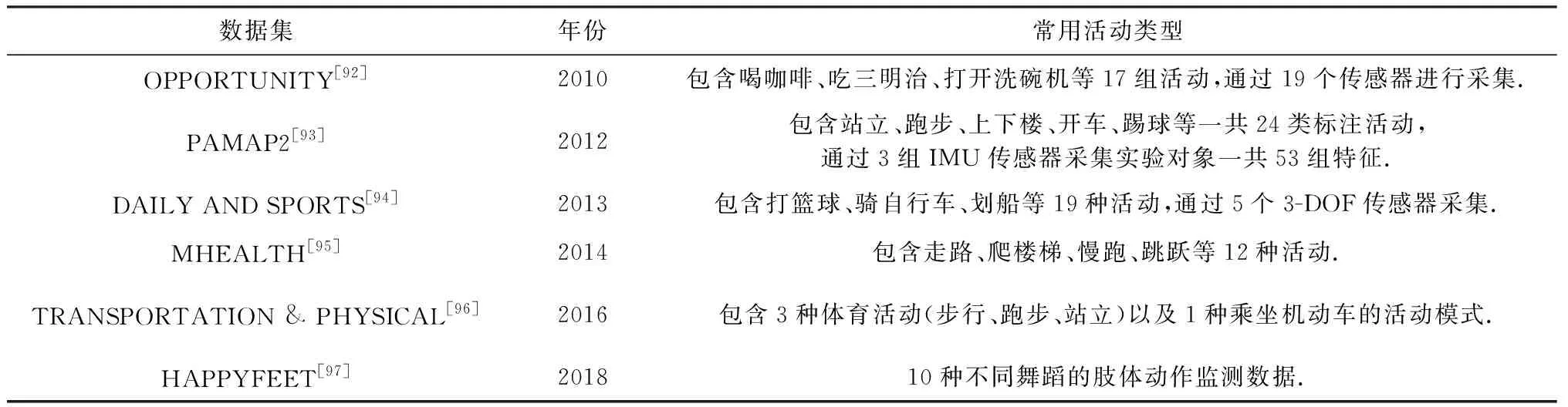
Table 4 Most Used Activity Recognization Datasets表4 常用的活動(dòng)識(shí)別數(shù)據(jù)集
除了數(shù)據(jù)標(biāo)記之外,活動(dòng)識(shí)別中還有一個(gè)重要的挑戰(zhàn),數(shù)據(jù)具有非常強(qiáng)烈的個(gè)性化特征和環(huán)境特征,這意味著訓(xùn)練集中的數(shù)據(jù)具有某種特定的偏向性,這種偏向性會(huì)導(dǎo)致不可避免的泛化誤差.為了解決這個(gè)問(wèn)題,Jiang等人[98]提出了一個(gè)基于深度學(xué)習(xí)活動(dòng)識(shí)別框架,它包含了2個(gè)識(shí)別器:領(lǐng)域識(shí)別器和活動(dòng)識(shí)別器.領(lǐng)域識(shí)別器可以識(shí)別出相關(guān)的環(huán)境或是主題;而活動(dòng)識(shí)別器則除了進(jìn)行活動(dòng)識(shí)別之外,還試圖欺騙領(lǐng)域識(shí)別器,從而學(xué)習(xí)與環(huán)境或主題無(wú)關(guān)的表征.這種架構(gòu)可以消除環(huán)境和主題中包含的特定信息特征,從而提升活動(dòng)識(shí)別模型的泛化能力和魯棒性.
4.3 小 結(jié)
模式識(shí)別是一種通過(guò)數(shù)學(xué)方法形成應(yīng)用理解和認(rèn)識(shí)環(huán)境的能力,我們?cè)谧赃m應(yīng)中將其分為情景感知和活動(dòng)識(shí)別2類.情景感知通過(guò)從環(huán)境中采集的參數(shù)特征,感知和理解應(yīng)用所處的外部環(huán)境,輔助應(yīng)用識(shí)別出應(yīng)用場(chǎng)景,進(jìn)行資源和應(yīng)用的適配,提升服務(wù)質(zhì)量;活動(dòng)識(shí)別則是從應(yīng)用的日志數(shù)據(jù)中挖掘出用戶和應(yīng)用活動(dòng)的一些頻繁模式,從而理解用戶的行為意圖,預(yù)判下一步的用戶行為,輔助應(yīng)用更好和更智能的資源規(guī)劃和流程自適應(yīng).
情景感知和活動(dòng)識(shí)別都是從數(shù)據(jù)中挖掘出有效信息,改善應(yīng)用服務(wù)質(zhì)量,因此不可避免地有一些共用的缺陷,如標(biāo)注數(shù)據(jù)稀少、樣本分布不均衡等.數(shù)據(jù)驅(qū)動(dòng)的方法通常需要在每個(gè)場(chǎng)景下為每個(gè)用戶都提供足夠多的訓(xùn)練數(shù)據(jù),但采集這樣的標(biāo)記樣本成本是相當(dāng)昂貴的,這嚴(yán)重阻礙了應(yīng)用系統(tǒng)的自適應(yīng)能力.近年來(lái)有不少的研究致力于解決這些問(wèn)題,也提出了許多解決方案.數(shù)據(jù)增強(qiáng)便是一種人為擴(kuò)展有標(biāo)注訓(xùn)練數(shù)據(jù)集的技術(shù),包括對(duì)樣本集進(jìn)行隨機(jī)過(guò)采樣,通過(guò)數(shù)學(xué)變換函數(shù)生成數(shù)據(jù),引入噪聲生成器來(lái)模糊原始數(shù)據(jù)集等.如文獻(xiàn)[99]提出的一種用戶自適應(yīng)模型(user adaptive model, UAM),通過(guò)隨機(jī)采樣技術(shù),使用少量的訓(xùn)練集(10%)即可大幅度提高活動(dòng)識(shí)別的精度.生成對(duì)抗網(wǎng)絡(luò)(genera-tive adversarial network, GAN)同樣是一種用于數(shù)據(jù)增強(qiáng)的技術(shù).GAN由生成網(wǎng)絡(luò)和判別網(wǎng)絡(luò)組成,生成網(wǎng)絡(luò)通過(guò)隨機(jī)噪聲生成訓(xùn)練數(shù)據(jù),判別網(wǎng)絡(luò)則利用實(shí)際數(shù)據(jù)訓(xùn)練出的判別模型判別生成的數(shù)據(jù)是否可用,借助2人零和博弈的思想,在對(duì)抗與生成的交替中提升2種模型精度.例如Yang等人[100]提出了一個(gè)基于GAN的模型OpenGAN,用于解決開(kāi)放集活動(dòng)識(shí)別的問(wèn)題,OpenGAN的生成器負(fù)責(zé)合成樣本,用于構(gòu)建樣本集,提高活動(dòng)識(shí)別的精度.
主動(dòng)學(xué)習(xí)(active learning)也是一種針對(duì)數(shù)據(jù)標(biāo)簽稀少場(chǎng)景的算法,主要思想是模型通過(guò)與用戶或?qū)<疫M(jìn)行交互,以查詢的方式讓專家確定數(shù)據(jù)標(biāo)簽.主動(dòng)學(xué)習(xí)與半監(jiān)督學(xué)習(xí)的區(qū)別在于主動(dòng)學(xué)習(xí)中有專家的參與,通過(guò)算法篩選出一些對(duì)于模型訓(xùn)練有益的數(shù)據(jù),以交互的方式讓專家對(duì)這些數(shù)據(jù)進(jìn)行標(biāo)注.主動(dòng)學(xué)習(xí)的難點(diǎn)在于如何篩選對(duì)于模型有益的數(shù)據(jù),因此相比于半監(jiān)督學(xué)習(xí)來(lái)說(shuō)樣本的使用效率更高.因此,一些研究也著力于使用主動(dòng)學(xué)習(xí)來(lái)提升小樣本時(shí)的識(shí)別精度[101]以及減少人工標(biāo)記數(shù)據(jù)的成本[102].
5 決策規(guī)劃
通過(guò)表征學(xué)習(xí)和模式識(shí)別,自適應(yīng)系統(tǒng)具備了感知和分析環(huán)境變化的能力.在此基礎(chǔ)上,自適應(yīng)系統(tǒng)將根據(jù)環(huán)境變化和挖掘的相關(guān)規(guī)則進(jìn)行在線規(guī)劃和決策,動(dòng)態(tài)調(diào)整應(yīng)用的行為或流程,從而可以以最佳的性能實(shí)現(xiàn)應(yīng)用功能,滿足用戶需求.從描述中可以看出,自適應(yīng)的在線決策規(guī)劃本質(zhì)是一個(gè)優(yōu)化問(wèn)題,優(yōu)化的目標(biāo)不僅是在滿足應(yīng)用需求的情況下實(shí)現(xiàn)性能最優(yōu),同時(shí)還需要在求解該問(wèn)題的時(shí)間上做權(quán)衡,在滿足在線應(yīng)用的條件下達(dá)到一個(gè)最優(yōu)或近似最優(yōu)的解決方案.
典型的決策規(guī)劃方法有基于預(yù)設(shè)規(guī)則的、基于概率模型的、基于最優(yōu)化算法的等,這些方法各有優(yōu)勢(shì)與缺點(diǎn).例如,基于預(yù)設(shè)規(guī)則的方法往往需要基于一定的專家知識(shí),預(yù)設(shè)出一部分相對(duì)簡(jiǎn)單的規(guī)則,然后通過(guò)搜索和規(guī)則匹配來(lái)實(shí)現(xiàn)決策,這類方法雖然簡(jiǎn)單有效且時(shí)間復(fù)雜度低,但是并不能應(yīng)對(duì)復(fù)雜的環(huán)境變化;基于概率模型的方法需要對(duì)環(huán)境變化建模,將其抽象為概率圖來(lái)進(jìn)行推理決策,這類方法同樣具有較好的時(shí)間復(fù)雜度,但決策的有效性依賴于模型與真實(shí)環(huán)境的匹配度,而事實(shí)上概率模型往往并不能有效地表示一個(gè)復(fù)雜系統(tǒng);同樣,基于最優(yōu)化算法的方法優(yōu)勢(shì)在于能從約束條件中求解出一個(gè)最優(yōu)的或近似最優(yōu)的解決方案,但隨著求解空間規(guī)模的增大,這類方法往往需要極大的時(shí)間復(fù)雜度,這對(duì)于一些具有較大狀態(tài)空間的系統(tǒng)或?qū)τ趯?shí)時(shí)性要求較高的系統(tǒng)來(lái)說(shuō)時(shí)間成本過(guò)高.
除此之外,近年來(lái)強(qiáng)化學(xué)習(xí)(reinforcement learning, RL)在決策領(lǐng)域的應(yīng)用也越來(lái)越受重視.強(qiáng)化學(xué)習(xí)適用于與環(huán)境動(dòng)態(tài)交互的場(chǎng)景,在不需要先驗(yàn)知識(shí)的情況下,通過(guò)最大化長(zhǎng)期回報(bào)來(lái)學(xué)習(xí)完成目標(biāo)的最優(yōu)策略,從而實(shí)現(xiàn)實(shí)時(shí)決策.強(qiáng)化學(xué)習(xí)是一種從環(huán)境狀態(tài)映射到動(dòng)作的學(xué)習(xí)算法,這類方法通常將決策問(wèn)題建模為Markov決策過(guò)程(MDP),MDP被定義為一個(gè)四元組(狀態(tài)S,動(dòng)作A,回報(bào)R,轉(zhuǎn)移概率P),根據(jù)交互數(shù)據(jù)來(lái)優(yōu)化決策以取得最佳的決策結(jié)果.目前有許多的研究工作都是以強(qiáng)化學(xué)習(xí)作為自適應(yīng)系統(tǒng)的決策技術(shù),其中大部分的研究重點(diǎn)是結(jié)合深度強(qiáng)化學(xué)習(xí)(DRL)與自適應(yīng)應(yīng)用.傳統(tǒng)強(qiáng)化學(xué)習(xí)的動(dòng)作空間和樣本空間有限,而深度強(qiáng)化學(xué)習(xí)則以深度網(wǎng)絡(luò)作為函數(shù)逼近器,能擬合更為復(fù)雜的狀態(tài)空間和連續(xù)的動(dòng)作空間.除這些方法外,也有不少研究嘗試將控制論的方法應(yīng)用在自適應(yīng)系統(tǒng)中[103],這類方法更多地使用了控制學(xué)理論和動(dòng)力學(xué)模型,主要運(yùn)用于機(jī)器人控制等領(lǐng)域,接下來(lái),我們將分別介紹概率模型、最優(yōu)化算法和強(qiáng)化學(xué)習(xí)在自適應(yīng)決策中的應(yīng)用.
5.1 概率模型
現(xiàn)代應(yīng)用的環(huán)境十分復(fù)雜,充滿了各種不確定性,這些不確定性可能會(huì)導(dǎo)致自適應(yīng)系統(tǒng)做出錯(cuò)誤的決策,所以許多研究著力于如何表示不確定性以及通過(guò)一定的策略來(lái)減少不確定性.概率模型正是一類使用概率來(lái)表示不確定性的算法,通過(guò)計(jì)算條件概率和聯(lián)合概率,可以準(zhǔn)確地解釋變量間的因果性和相關(guān)性,從而推導(dǎo)出客觀事實(shí),進(jìn)行合理的決策.
事實(shí)上,使用概率分析進(jìn)行決策有多種方法,通常是將學(xué)習(xí)決策模型轉(zhuǎn)化為求概率分布,并計(jì)算聯(lián)合概率和條件概率來(lái)表征因果關(guān)聯(lián).而變量間的這些關(guān)聯(lián)關(guān)系往往非常復(fù)雜,多維的變量間都存在著相互依賴,導(dǎo)致直接求解的復(fù)雜度相當(dāng)高,因此通常會(huì)使用圖結(jié)構(gòu)來(lái)表示變量間的依賴關(guān)系,這種模型被稱為概率圖模型(probabilistic graphical model, PGM).
概率圖理論分為表示、推理和學(xué)習(xí)理論,廣泛運(yùn)用于人工智能、機(jī)器學(xué)習(xí)和計(jì)算機(jī)視覺(jué)等領(lǐng)域.概率圖模型的一個(gè)核心的理論基礎(chǔ)便是貝葉斯法則:
(2)
其中P(M)表示關(guān)于事件M的先驗(yàn)概率,P(M|N)為已知事件N發(fā)生后事件M的條件概率,也就是事件M的后驗(yàn)概率,學(xué)習(xí)的過(guò)程通常是根據(jù)數(shù)據(jù)分布來(lái)調(diào)整事件M的后驗(yàn)概率,使之更符合事實(shí)情況.概率圖模型分為貝葉斯網(wǎng)絡(luò)(Bayesian network, BN)和Markov隨機(jī)場(chǎng)(Markov random field, MRF)兩類,這兩類包括一些經(jīng)典模型,如隱Markov模型、條件隨機(jī)場(chǎng)、高斯混合模型等.
概率模型在自適應(yīng)決策規(guī)劃中的應(yīng)用,主要體現(xiàn)在解決自適應(yīng)系統(tǒng)中的不確定性決策問(wèn)題.例如,Naqvi等人[104]提出了一個(gè)用于自適應(yīng)計(jì)算卸載的模型MAsCOT,為了針對(duì)即使沒(méi)有全部信息的情況下也能做出這種考慮不確定性的推理決策,該模型使用了基于概率圖模型的動(dòng)態(tài)決策網(wǎng)絡(luò)(dynamic decision networks, DDNs)進(jìn)行運(yùn)行時(shí)的決策,動(dòng)態(tài)決策網(wǎng)絡(luò)以最大化效用的概率加權(quán)期望作為優(yōu)化目標(biāo),該模型由3種類型的節(jié)點(diǎn)組成:機(jī)會(huì)節(jié)點(diǎn)、決策節(jié)點(diǎn)和效用節(jié)點(diǎn),3種節(jié)點(diǎn)組成了一個(gè)有向無(wú)環(huán)圖(directed acyclic graph, DAG),通過(guò)結(jié)合圖論和概率計(jì)算來(lái)估計(jì)條件概率分布(conditional probability distributions, CPDs),接著利用經(jīng)驗(yàn)最大化(expec-tation maximum, EM)算法來(lái)選取最大效用的策略.Shi等人[105]同樣也使用了貝葉斯網(wǎng)絡(luò)來(lái)表征決策的概率依賴,由于自適應(yīng)系統(tǒng)中存在的非確定性,他們提出了使用模糊邏輯來(lái)進(jìn)行知識(shí)表示.由于貝葉斯網(wǎng)絡(luò)通過(guò)更新節(jié)點(diǎn)概率來(lái)進(jìn)行自適應(yīng)推理的能力優(yōu)于模糊邏輯,所以他們結(jié)合了2種方法進(jìn)行態(tài)勢(shì)預(yù)測(cè),作為自適應(yīng)決策的基礎(chǔ),通過(guò)對(duì)自適應(yīng)系統(tǒng)的環(huán)境特征建立貝葉斯網(wǎng)絡(luò),并將模糊邏輯態(tài)勢(shì)評(píng)價(jià)方法與實(shí)際博弈相結(jié)合,最后使用強(qiáng)化學(xué)習(xí)來(lái)學(xué)習(xí)有效的策略.與之相同的是,Epifani等人[106]也使用了貝葉斯估計(jì)器,利用從運(yùn)行的系統(tǒng)中收集的數(shù)據(jù)來(lái)對(duì)模型進(jìn)行更新,這種動(dòng)態(tài)參數(shù)估計(jì)的方法能夠幫助模型在運(yùn)行時(shí)提供更好的系統(tǒng)表示,從而使模型與實(shí)際情況保持同步,逐步優(yōu)化模型性能.
同時(shí),對(duì)一個(gè)復(fù)雜隨機(jī)的交互環(huán)境而言,構(gòu)建一些經(jīng)典模型(如MDP)是非常困難的,需要大量的人工經(jīng)驗(yàn)進(jìn)行抽象建模.而概率模型則可以以隨機(jī)環(huán)境的形式化規(guī)范作為輸入,通過(guò)概率分析網(wǎng)絡(luò)將其轉(zhuǎn)換為MDP進(jìn)行求解[14-15].通過(guò)將系統(tǒng)建模為概率系統(tǒng),可以使用概率模型檢驗(yàn)來(lái)分析不確定系統(tǒng),Cámara等人[5]基于此,在面對(duì)拒絕服務(wù)(denial of service, DoS)攻擊的場(chǎng)景下,使用概率模型檢查開(kāi)發(fā)了應(yīng)對(duì)非確定系統(tǒng)的自適應(yīng)決策技術(shù),有效地降低了決策的時(shí)間.但概率模型的缺點(diǎn)也很明顯,不僅需要一定的建模能力,能表示的環(huán)境模型也有限,現(xiàn)今更多的研究是將概率模型與強(qiáng)化學(xué)習(xí)這類更為通用的模型結(jié)合,使用概率模型來(lái)提取環(huán)境,使用強(qiáng)化學(xué)習(xí)來(lái)學(xué)習(xí)策略.
5.2 最優(yōu)化算法
最優(yōu)化問(wèn)題指在一定的約束條件下構(gòu)造出一個(gè)合適的目標(biāo)函數(shù),如何求解使得這個(gè)目標(biāo)函數(shù)達(dá)到極值,形式化的定義為
(3)
其中,f(x)是目標(biāo)函數(shù),x是決策變量,Ω是約束條件.解決最優(yōu)化問(wèn)題通常有2個(gè)步驟:1)對(duì)問(wèn)題進(jìn)行建模,構(gòu)造約束條件和目標(biāo)函數(shù);2)根據(jù)一定的最優(yōu)值搜索策略,在可行解中搜索最優(yōu)解.常用的最優(yōu)化算法分為2類:精確算法和近似算法.精確算法可以搜索出目標(biāo)問(wèn)題的最優(yōu)解,這類方法包括線性規(guī)劃、動(dòng)態(tài)規(guī)劃、整數(shù)規(guī)劃和分支定界法等,這類算法復(fù)雜度較高,適合求解空間較小的問(wèn)題;近似算法則通常只能求出問(wèn)題的近似解,但面對(duì)求解空間龐大的問(wèn)題,可以在多項(xiàng)式時(shí)間內(nèi)以高概率逼近最優(yōu)解,這類算法主要是包含了啟發(fā)式算法,如模擬退火、禁忌搜索、蟻群算法、粒子群算法以及進(jìn)化算法簇等.
在自適應(yīng)系統(tǒng)中,目標(biāo)函數(shù)通常設(shè)置為以執(zhí)行過(guò)程中的效用為目標(biāo),并且是一個(gè)連續(xù)決策的問(wèn)題,被管理系統(tǒng)和環(huán)境會(huì)隨著時(shí)間的推移而進(jìn)化,因而決策的時(shí)間也是一個(gè)重要的考慮因素.為了優(yōu)化這個(gè)問(wèn)題,Moreno等人[14]提出了一種以概率模型建模環(huán)境,但以隨機(jī)動(dòng)態(tài)規(guī)劃替代概率模型檢查來(lái)求解自適應(yīng)決策,這種使用隨機(jī)動(dòng)態(tài)規(guī)劃的方法比概率模型求解快了一個(gè)數(shù)量級(jí).Nascimento等人[107]同樣也使用了進(jìn)化算法進(jìn)行決策,結(jié)合多智能體系統(tǒng)(multi-agent system, MAS)設(shè)計(jì)了一個(gè)自適應(yīng)系統(tǒng),將其應(yīng)用于物聯(lián)網(wǎng)(Internet of things, IoT)領(lǐng)域,在一個(gè)智能交通的應(yīng)用上運(yùn)行進(jìn)化算法來(lái)對(duì)交通燈進(jìn)行決策,自適應(yīng)改善城市交通流,實(shí)驗(yàn)評(píng)估表明他們提出的FIoT(framework for Internet of things)模型比傳統(tǒng)的決策模型的車輛通行量高出1倍左右.Dezfuli等人[108]同樣也提出了一種在自適應(yīng)系統(tǒng)中使用在線規(guī)劃算法ReteRL進(jìn)行決策的動(dòng)態(tài)自適應(yīng)網(wǎng)站,與Rete-OO和強(qiáng)化學(xué)習(xí)算法相比,使用在線規(guī)劃提高了決策的效率和可用性,這種改進(jìn)大大提升了網(wǎng)站的定性特征,如響應(yīng)時(shí)間和可用性.
在自適應(yīng)系統(tǒng)中引入最優(yōu)化算法的優(yōu)勢(shì)在于問(wèn)題的形式化抽象較好,相對(duì)于一些傳統(tǒng)模型來(lái)說(shuō)可以考慮的變化更多,這類多目標(biāo)優(yōu)化的方法能從龐大的搜索空間中最大程度優(yōu)化目標(biāo)函數(shù),支持連續(xù)的狀態(tài)和動(dòng)作空間.在如今復(fù)雜的軟件系統(tǒng)中,面臨的問(wèn)題更多屬于連續(xù)的空間優(yōu)化問(wèn)題,因此Wan等人[109]提出了一種雙層MAPE的自適應(yīng)控制結(jié)構(gòu),分別實(shí)現(xiàn)了基于最優(yōu)化搜索的規(guī)劃方法和基于規(guī)則的強(qiáng)化學(xué)習(xí)規(guī)劃方法,分別用在局部和全局的多智能體代理中.文獻(xiàn)[109]中提出的方法使用多目標(biāo)進(jìn)化算法,可以在目標(biāo)函數(shù)的約束空間內(nèi)在線搜索最優(yōu)解,針對(duì)應(yīng)用的變化動(dòng)態(tài)地匹配自適應(yīng)策略.相對(duì)于強(qiáng)化學(xué)習(xí),這種搜索算法顯得更靈活和快速,所以被用在局部的智能體自適應(yīng)中.
最優(yōu)化算法在自適應(yīng)系統(tǒng)中通過(guò)搜索目標(biāo)函數(shù)的最優(yōu)解來(lái)進(jìn)行決策,在目標(biāo)函數(shù)相對(duì)簡(jiǎn)單的情況下能夠快速靈活地求解,但對(duì)于目標(biāo)函數(shù)復(fù)雜、求解空間龐大的問(wèn)題,使用最優(yōu)化算法往往意味著較大的計(jì)算成本.除此之外還有一些場(chǎng)景,定義目標(biāo)函數(shù)和約束條件往往十分困難,這一點(diǎn)與概率模型類似,所以近年來(lái)同樣有不少研究在探索將最優(yōu)化算法與強(qiáng)化學(xué)習(xí)相結(jié)合.Goyal等人在文獻(xiàn)[110]中,對(duì)進(jìn)化算法結(jié)合強(qiáng)化學(xué)習(xí)的算法進(jìn)行了回顧,詳細(xì)介紹和對(duì)比了遺傳算法(genetic algorithm, GA)、粒子群算法(particle swarm optimization, PSO)、蟻群算法(ant colony optimization, ACO)等與強(qiáng)化學(xué)習(xí)相結(jié)合的高性能技術(shù).
5.3 強(qiáng)化學(xué)習(xí)
強(qiáng)化學(xué)習(xí)是一種讓自主行動(dòng)的應(yīng)用個(gè)體在與環(huán)境之間交互的過(guò)程中逐步改進(jìn)自身行為的模型.事實(shí)上,強(qiáng)化學(xué)習(xí)在控制領(lǐng)域也被稱為近似動(dòng)態(tài)規(guī)劃(adaptive dynamic programming, ADP),這是一種用來(lái)解決長(zhǎng)期序貫決策問(wèn)題的經(jīng)典算法,經(jīng)過(guò)多年研究人員的努力發(fā)展,逐步形成了如今一整套的強(qiáng)化學(xué)習(xí)理論方法.一個(gè)經(jīng)典的強(qiáng)化學(xué)習(xí)模型由5部分組成:智能體(agent)、觀察(observation)、回報(bào)(reward)、動(dòng)作(action)和環(huán)境(environment)組成,其累計(jì)回報(bào)定義為使用貝爾曼方程表示的價(jià)值函數(shù),優(yōu)化的目標(biāo)即是如何選擇合理策略(policy)來(lái)保證獲取到最大的累計(jì)回報(bào).傳統(tǒng)的強(qiáng)化學(xué)習(xí)解決的問(wèn)題通常是離散低維的,狀態(tài)和動(dòng)作空間較小.而現(xiàn)今的應(yīng)用往往是高維且復(fù)雜的,所以研究人員提出了深度強(qiáng)化學(xué)習(xí),通過(guò)使用神經(jīng)網(wǎng)絡(luò)來(lái)逼近狀態(tài)價(jià)值函數(shù),從而能表達(dá)更高維的環(huán)境特征以及更復(fù)雜的狀態(tài)動(dòng)作空間.
近年來(lái)強(qiáng)化學(xué)習(xí)在自適應(yīng)系統(tǒng)中的應(yīng)用通常是指深度強(qiáng)化學(xué)習(xí),其按策略更新模式分為在線策略和離線策略2種,而根據(jù)動(dòng)作空間則可以分為離散空間和連續(xù)空間,目前主流的強(qiáng)化學(xué)習(xí)通常是基于actor-critic架構(gòu),如深度確定性策略梯度方法(deep deterministic policy gradient, DDPG)和信賴域策略優(yōu)化方法(trust region policy optimization, TRPO)等.強(qiáng)化學(xué)習(xí)是目前在自適應(yīng)決策中最受關(guān)注的熱門技術(shù)之一,大量的研究工作都集中在使用強(qiáng)化學(xué)習(xí)來(lái)優(yōu)化自適應(yīng)系統(tǒng)的決策上.例如Zhao等人[111-112]提出了一種基于強(qiáng)化學(xué)習(xí)的自適應(yīng)規(guī)則生成與演化框架,該框架通過(guò)離線學(xué)習(xí)產(chǎn)生了基本的決策能力,然后結(jié)合案例推理技術(shù)根據(jù)線上動(dòng)態(tài)環(huán)境的信息與案例庫(kù)演化出自適應(yīng)規(guī)則.這種方法改進(jìn)了現(xiàn)有基于規(guī)則的自適應(yīng)方式的靈活性和質(zhì)量,案例庫(kù)的引入使得算法能夠記憶有效歷史決策流程,當(dāng)環(huán)境改變時(shí)可以依據(jù)歷史決策樣例進(jìn)行推理,這樣能夠有效減少重新求解決策過(guò)程的時(shí)間,同時(shí)也能保證決策的質(zhì)量.這些基于強(qiáng)化學(xué)習(xí)的模型與MAPE-K模型不同,MAPE-K基于一些預(yù)定義策略的手工編碼邏輯,這些策略需要專家對(duì)系統(tǒng)設(shè)計(jì)進(jìn)行詳細(xì)的理解,以預(yù)測(cè)資源更改如何影響系統(tǒng)性能,這種方式并不適用于當(dāng)今復(fù)雜的應(yīng)用程序,因此有研究提出了使用強(qiáng)化學(xué)習(xí)來(lái)負(fù)責(zé)MAPE-K的決策過(guò)程,將強(qiáng)化學(xué)習(xí)作為MAPE-K的一部分組件[34],從而提升自適應(yīng)系統(tǒng)的性能.
由于深度強(qiáng)化學(xué)習(xí)的易用性和泛化能力,因此被廣泛運(yùn)用于各種場(chǎng)景的自適應(yīng)系統(tǒng),如虛擬機(jī)容量控制[113]、航空電子系統(tǒng)[114]、企業(yè)級(jí)應(yīng)用服務(wù)組合[115]、虛擬機(jī)放置[116]、工作流調(diào)度[117]、應(yīng)用程序組件組合[34]、機(jī)器人足球比賽[105]、移動(dòng)邊緣計(jì)算卸載[118]、邊緣緩存放置[119]等.這些場(chǎng)景雖然各不相同,但對(duì)于強(qiáng)化學(xué)習(xí)來(lái)說(shuō),只需要抽象出對(duì)應(yīng)的模型就可以使用算法進(jìn)行決策,所以強(qiáng)化學(xué)習(xí)具有比較好的易用性和通用性.
基于強(qiáng)化學(xué)習(xí)的自適應(yīng)決策是目前研究的熱點(diǎn),不僅是在不同應(yīng)用領(lǐng)域的研究,還有許多研究著力于結(jié)合其他模型,提高自適應(yīng)系統(tǒng)的性能.比如多智能體強(qiáng)化學(xué)習(xí)(multi-agent reinforcement learning, MARL),通過(guò)博弈論與強(qiáng)化學(xué)習(xí)相結(jié)合,利用納什均衡來(lái)改進(jìn)強(qiáng)化學(xué)習(xí)算法在多個(gè)智能體之間協(xié)調(diào)的性能[115];Tomás等人[113]則將模糊邏輯與強(qiáng)化學(xué)習(xí)結(jié)合,提出了一個(gè)在線的模糊強(qiáng)化學(xué)習(xí)算法(fuzzy q-learning, FQL),用于解決環(huán)境存在模糊描述的自適應(yīng)決策問(wèn)題;Ganguly等人[120]則針對(duì)分布式應(yīng)用的自適應(yīng)問(wèn)題,提出了去中心化的強(qiáng)化學(xué)習(xí)算法,動(dòng)態(tài)地更新本地和全局模型,實(shí)現(xiàn)分布式應(yīng)用的自適應(yīng);同樣是針對(duì)分布式的自適應(yīng)系統(tǒng),Wan等人[109]則是提出了一種雙層MAPE-K自適應(yīng)模型,結(jié)合進(jìn)化算法和強(qiáng)化學(xué)習(xí),使用進(jìn)化算法優(yōu)化manager層,使用強(qiáng)化學(xué)習(xí)來(lái)優(yōu)化worker層;Shi等人[105]則考慮到了系統(tǒng)中的不確定性,針對(duì)動(dòng)態(tài)決策中的非確定性知識(shí)表示和模型的復(fù)雜度,提出了一個(gè)結(jié)合貝葉斯網(wǎng)絡(luò)和強(qiáng)化學(xué)習(xí)的模型,實(shí)驗(yàn)表明這種方法在非確定性環(huán)境模型下可以更好地選擇最優(yōu)策略;而為了解決強(qiáng)化學(xué)習(xí)在感知力上的缺陷,Wang等人[87]則考慮結(jié)合循環(huán)神經(jīng)網(wǎng)絡(luò)與強(qiáng)化學(xué)習(xí),來(lái)提升自適應(yīng)系統(tǒng)對(duì)時(shí)序數(shù)據(jù)進(jìn)行決策的性能;為了解決強(qiáng)化學(xué)習(xí)的性能嚴(yán)重受超參影響的問(wèn)題,Xiong等人[118]引入了最大熵算法,有效地平衡了強(qiáng)化學(xué)習(xí)的exploration與exploitation,來(lái)降低強(qiáng)化學(xué)習(xí)對(duì)于超參的敏感性,提高自適應(yīng)模型的自動(dòng)化和泛化能力;Wang等人[26]則將強(qiáng)化學(xué)習(xí)與聯(lián)邦學(xué)習(xí)結(jié)合在一起,用于聯(lián)邦學(xué)習(xí)中的緩存自適應(yīng)決策.
5.4 小 結(jié)
決策規(guī)劃是自適應(yīng)系統(tǒng)中最為重要的關(guān)鍵技術(shù),決策問(wèn)題可以看作是從所有可行策略中選擇最適合、最高效的策略,同時(shí)還要盡可能地保證算法的時(shí)效性,滿足在線自適應(yīng)決策的需求.表5總結(jié)了一些自適應(yīng)決策的文獻(xiàn)分類,可以看出近年來(lái)主流的決策算法都集中在強(qiáng)化學(xué)習(xí)上,這類端到端(end-to-end)的算法仍然是未來(lái)自適應(yīng)發(fā)展系統(tǒng)的趨勢(shì).
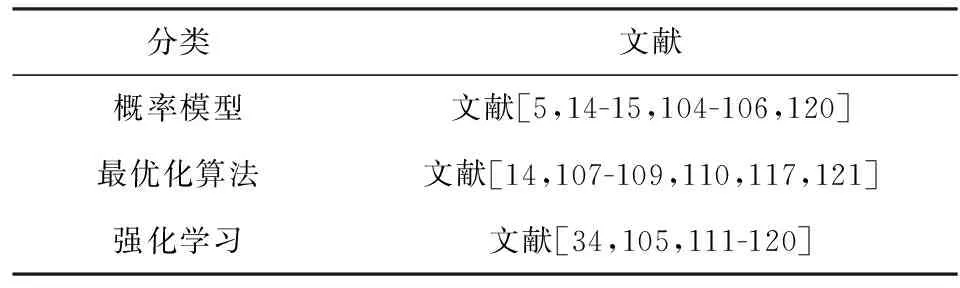
Table 5 References About Adaptive Planning表5 自適應(yīng)決策的相關(guān)文獻(xiàn)
自適應(yīng)決策目前仍然存在很多需要解決的問(wèn)題:1)決策的實(shí)時(shí)性問(wèn)題,目前主流的方案是采用主動(dòng)延遲感知(predictive latency-aware, PLA)的適應(yīng)決策,通過(guò)限定決策時(shí)間來(lái)保證決策的實(shí)時(shí)性;2)系統(tǒng)的非確定性問(wèn)題,環(huán)境中的不確定性意味著無(wú)法簡(jiǎn)單地對(duì)環(huán)境變化進(jìn)行建模,需要結(jié)合如概率分析等技術(shù)手段來(lái)處理不確定性;3)多智能體間的不完全可知信息決策問(wèn)題,在智能體間信息不對(duì)稱時(shí),如何保證算法能做出最優(yōu)的決策;4)分布式系統(tǒng)的自適應(yīng)問(wèn)題,如何在去中心化的系統(tǒng)中實(shí)現(xiàn)自適應(yīng)決策,保證局部系統(tǒng)均能獲得自適應(yīng)決策的收益.這些都是在自適應(yīng)決策方面值得進(jìn)一步研究的熱點(diǎn)問(wèn)題,同時(shí)意味著自適應(yīng)決策技術(shù)未來(lái)將向著智能化、快響應(yīng)、大規(guī)模的方向發(fā)展.
6 規(guī)則演化
正如在1.2節(jié)中提到的,數(shù)據(jù)驅(qū)動(dòng)的自適應(yīng)技術(shù)是從歷史數(shù)據(jù)中學(xué)習(xí)出最優(yōu)的策略,因此數(shù)據(jù)驅(qū)動(dòng)應(yīng)用存在一個(gè)關(guān)鍵的缺陷:冷啟動(dòng)和數(shù)據(jù)缺少的問(wèn)題.由于當(dāng)今應(yīng)用環(huán)境的復(fù)雜多變,導(dǎo)致使用這類基于歷史數(shù)據(jù)的方法處理一些歷史中未出現(xiàn)的“模式”時(shí),并不能很好地實(shí)現(xiàn)自適應(yīng)的功能.規(guī)則演化就是應(yīng)對(duì)實(shí)時(shí)環(huán)境中出現(xiàn)這種未知“模式”時(shí),從已有的數(shù)據(jù)或規(guī)則中推理出相關(guān)性,將未知“模式”規(guī)約到已知的場(chǎng)景下,或是針對(duì)未知“模式”生成新的處理規(guī)則的方法.
一個(gè)經(jīng)典的規(guī)則推理方法稱為基于案例的推理(case-based reasoning, CBR)[122],這是一種懶加載解決問(wèn)題的方法,它從知識(shí)庫(kù)中找到類似的已解決問(wèn)題來(lái)解決一個(gè)新問(wèn)題,即利用舊的經(jīng)驗(yàn)來(lái)理解和解決新問(wèn)題,解決后的新問(wèn)題又將成為知識(shí)庫(kù)的一部分[1].CBR利用過(guò)去案例的知識(shí)來(lái)解決新案例,一共有4個(gè)步驟:1)檢索,計(jì)算相似度來(lái)檢索最相似的過(guò)去案例;2)重用,通過(guò)重用最相似的案例中的信息和知識(shí),為新案例提出解決方案;3)修訂,修改建議的解決方案;4)保留,保留有關(guān)新案例解決方案的信息和知識(shí).Zhao等人[111-112]提出一個(gè)可以在線進(jìn)行規(guī)則演化的自適應(yīng)系統(tǒng),通過(guò)結(jié)合強(qiáng)化學(xué)習(xí)和基于案例推理的技術(shù),在線進(jìn)行規(guī)則集演化來(lái)對(duì)環(huán)境的未知變化做出自適應(yīng)的調(diào)整,為新目標(biāo)激活新的案例解決方案,解決自適應(yīng)系統(tǒng)面對(duì)新環(huán)境的適應(yīng)問(wèn)題.Raza等人[123]則提供了一種基于案例推理的數(shù)據(jù)庫(kù)負(fù)載自適應(yīng)解決方案,與單純的機(jī)器學(xué)習(xí)方法相比,案例推理在面對(duì)未知案例時(shí),不需要重新訓(xùn)練數(shù)據(jù)集來(lái)進(jìn)行自適應(yīng),而是可以直接在線進(jìn)行案例檢索并解決,動(dòng)態(tài)更新案例庫(kù).
案例推理需要借助歷史案例來(lái)解決新問(wèn)題,但如果新問(wèn)題與案例庫(kù)中的差異過(guò)大,對(duì)應(yīng)的解決方案則不能很好地適應(yīng)新問(wèn)題,這是數(shù)據(jù)驅(qū)動(dòng)的方法不可避免的缺陷,因此面對(duì)這樣的問(wèn)題,研究人員提出了引入一定規(guī)則驅(qū)動(dòng)技術(shù)來(lái)提升自適應(yīng)系統(tǒng)的穩(wěn)定性.基于這個(gè)考慮,Mongiello等人[124]提出了一個(gè)結(jié)合知識(shí)圖譜與案例推理的自適應(yīng)系統(tǒng),用于智能手機(jī)的應(yīng)用自適應(yīng).該文作者提出的框架利用知識(shí)圖譜對(duì)自適應(yīng)軟件及運(yùn)行環(huán)境進(jìn)行建模,包括應(yīng)用目標(biāo)、事件流程、操作要求等,利用知識(shí)圖譜的分析推理功能,可以大大提升自適應(yīng)系統(tǒng)處理新問(wèn)題的能力[125].
除了案例推理與知識(shí)圖譜之外,遷移學(xué)習(xí)也是一種有效幫助系統(tǒng)適應(yīng)新環(huán)境的方法.雖然知識(shí)工程技術(shù)能夠處理一部分冷啟動(dòng)問(wèn)題,但這類方法無(wú)法處理不確定性的問(wèn)題,而遷移學(xué)習(xí)則能借助概率推理來(lái)處理新問(wèn)題中的不確定性.遷移學(xué)習(xí)旨在解決訓(xùn)練數(shù)據(jù)和實(shí)時(shí)數(shù)據(jù)在不同的特征空間、具有不同分布情況下的學(xué)習(xí)問(wèn)題,即智能地應(yīng)用以前的學(xué)習(xí)知識(shí)來(lái)更快或更有效地解決新問(wèn)題[126].文獻(xiàn)[11]總結(jié)了近幾年遷移學(xué)習(xí)在智能家居的自適應(yīng)系統(tǒng)中的應(yīng)用,遷移學(xué)習(xí)可以用來(lái)解決當(dāng)環(huán)境變化時(shí)自適應(yīng)系統(tǒng)如何保證正常執(zhí)行應(yīng)用程序.
7 結(jié)束語(yǔ)
在本文中,我們介紹了數(shù)據(jù)驅(qū)動(dòng)的自適應(yīng)技術(shù)近幾年的研究現(xiàn)狀,并總結(jié)出了一個(gè)數(shù)據(jù)驅(qū)動(dòng)應(yīng)用的自適應(yīng)系統(tǒng)應(yīng)包含4種關(guān)鍵技術(shù):表征學(xué)習(xí)、模式識(shí)別、決策規(guī)劃、規(guī)則演化,接著我們分別綜述和總結(jié)了這4種技術(shù)在數(shù)據(jù)驅(qū)動(dòng)的自適應(yīng)系統(tǒng)中的應(yīng)用.自適應(yīng)技術(shù)一直是應(yīng)用開(kāi)發(fā)的研究熱點(diǎn),利用自適應(yīng)技術(shù)可以實(shí)現(xiàn)應(yīng)用的環(huán)境適配、故障容錯(cuò)、負(fù)載均衡等.傳統(tǒng)的自適應(yīng)技術(shù)通常是規(guī)則模型驅(qū)動(dòng)的,這類技術(shù)往往在面對(duì)復(fù)雜環(huán)境和處理不確定性上具有局限性,而數(shù)據(jù)驅(qū)動(dòng)技術(shù)則是更多地結(jié)合了如今的人工智能技術(shù),從概率和數(shù)理統(tǒng)計(jì)的角度來(lái)學(xué)習(xí)環(huán)境的變化,提取環(huán)境模型的特征來(lái)進(jìn)行自適應(yīng)系統(tǒng)的模式識(shí)別和決策規(guī)劃,并針對(duì)數(shù)據(jù)驅(qū)動(dòng)的冷啟動(dòng)問(wèn)題,通過(guò)結(jié)合一部分知識(shí)驅(qū)動(dòng)手段來(lái)實(shí)現(xiàn)規(guī)則的演化,增強(qiáng)自適應(yīng)系統(tǒng)處理不確定性環(huán)境的變化.
隨著人工智能技術(shù)的發(fā)展,數(shù)據(jù)驅(qū)動(dòng)的自適應(yīng)也開(kāi)始轉(zhuǎn)向自動(dòng)化、智能化、集成化的方向發(fā)展,本文雖然將系統(tǒng)分為了4個(gè)模塊,但許多工作開(kāi)始研究端到端的自適應(yīng)技術(shù),將多階段的處理合成為一個(gè)神經(jīng)網(wǎng)絡(luò)來(lái)建模.除此之外,隨著如今大規(guī)模分布式系統(tǒng)以及邊緣計(jì)算的興起,自適應(yīng)技術(shù)的分布式化也成為了一個(gè)研究的趨勢(shì),如分布式的MAPE-K[30]等.同時(shí),目前的數(shù)據(jù)驅(qū)動(dòng)自適應(yīng)雖然擺脫了預(yù)定義規(guī)則的束縛,但如何歸納從數(shù)據(jù)中挖掘出的規(guī)則,形成可演繹進(jìn)化的新規(guī)則仍然是研究的重點(diǎn),也是未來(lái)智能化的自適應(yīng)技術(shù)探究的方向.
作者貢獻(xiàn)聲明:代浩負(fù)責(zé)研究?jī)?nèi)容整理、論文撰寫和修訂;金銘負(fù)責(zé)文獻(xiàn)調(diào)研及論文圖表整理;陳星、李楠、涂志瑩負(fù)責(zé)論文部分撰寫和修訂;陳星和涂志瑩負(fù)責(zé)整體論文的檢查和修訂;王洋提出論文整體架構(gòu)和綜述路線,及最終論文的審核與修訂.
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
中老年保健(2021年12期)2021-08-24 03:30:40
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
中國(guó)生殖健康(2020年6期)2020-02-01 06:28:50
中國(guó)生殖健康(2019年11期)2019-01-07 01:28:02
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
