關(guān)于CORS實時高精度自主解算平臺的研究
2022-11-11 05:57:42馮振儉
大眾科技 2022年10期
馮振儉
關(guān)于CORS實時高精度自主解算平臺的研究
馮振儉
(南寧市自然資源信息集團(tuán)有限公司,廣西 南寧 530021)
隨著北斗三號組網(wǎng)建設(shè)進(jìn)入收官階段,以北斗為核心的GNSS應(yīng)用市場將迎來高速發(fā)展期,然而,現(xiàn)有CORS系統(tǒng)受算法局限,難以滿足海量用戶高并發(fā)應(yīng)用的需求,制約了CORS系統(tǒng)的全面推廣應(yīng)用。文章提出了建立CORS實時高精度自主解算平臺的技術(shù)路線,從平臺總體架構(gòu)、CORS分布式服務(wù)子系統(tǒng)、CORS網(wǎng)絡(luò)RTK解算子系統(tǒng)三個方面闡述了平臺的設(shè)計思路,優(yōu)化了CORS系統(tǒng)數(shù)據(jù)解算算法,解決了CORS海量用戶高并發(fā)應(yīng)用的問題。
CORS;自主解算;平臺
引言
近年來我國的國民經(jīng)濟(jì)持續(xù)處于高速發(fā)展?fàn)顟B(tài),各類用戶對穩(wěn)定可靠的高精度位置服務(wù)的需求增長迅猛,雖然目前基于區(qū)域CORS的網(wǎng)絡(luò)RTK能夠向用戶提供厘米級的定位精度,但是目前市面上的大多數(shù)軟件在海量用戶同時在線時,由于算法本身的局限,服務(wù)器壓力劇增,必然會出現(xiàn)服務(wù)器崩潰、服務(wù)中斷等問題。因此,面對海量用戶的并發(fā)請求,必然需要研發(fā)新一代算法,具備多線程、分布式計算的能力,以高效率、高穩(wěn)定性解決海量用戶并發(fā)的問題。
1 研究目標(biāo)及內(nèi)容
基于國家北斗高精度定位系統(tǒng),研發(fā)和建立國產(chǎn)自主的CORS實時高精度自主解算服務(wù)云平臺,能夠在精度和穩(wěn)定性達(dá)到國際同類軟件的水平,滿足CORS安全升級改造工作中軟件要求,能通過云技術(shù)為海量級用戶提供穩(wěn)定可靠的高精度定位導(dǎo)航服務(wù),同時在滿足安全規(guī)定的前提下還支持開放接口將高精度服務(wù)數(shù)據(jù)共享應(yīng)用至其他政府部門。
CORS實時高精度自主解算服務(wù)云平臺建設(shè)主要包括CORS分布式服務(wù)子系統(tǒng)建設(shè)和CORS網(wǎng)絡(luò)RTK解算子系統(tǒng)建設(shè)兩部分。其中,CORS分布式服務(wù)子系統(tǒng)建設(shè)支持分布式部署架構(gòu),可以在云服務(wù)器上進(jìn)行拓展與部署,支持海量并發(fā)用戶,該子系統(tǒng)包含系統(tǒng)基礎(chǔ)功能、專業(yè)服務(wù)接口、系統(tǒng)主控中心以及格網(wǎng)服務(wù)模塊。CORS網(wǎng)絡(luò)RTK解算子系統(tǒng)建設(shè)支持VRS模式,支持格網(wǎng)化虛擬參考站生成、存儲、播發(fā)。該子系統(tǒng)包含觀測數(shù)據(jù)與實時產(chǎn)品的接收功能、數(shù)據(jù)預(yù)處理功能、數(shù)據(jù)解算功能、改正數(shù)儲存功能、改正數(shù)脫密功能。
2 平臺架構(gòu)設(shè)計
2.1 分布式服務(wù)子系統(tǒng)架構(gòu)設(shè)計
CORS分布式服務(wù)子系統(tǒng)采用三層B/S結(jié)構(gòu),基于ASP.NET技術(shù)開發(fā)系統(tǒng)應(yīng)用平臺,整個系統(tǒng)分為應(yīng)用層、邏輯層和數(shù)據(jù)層。各部分功能作用如下所述,其框架結(jié)構(gòu)如圖1所示。
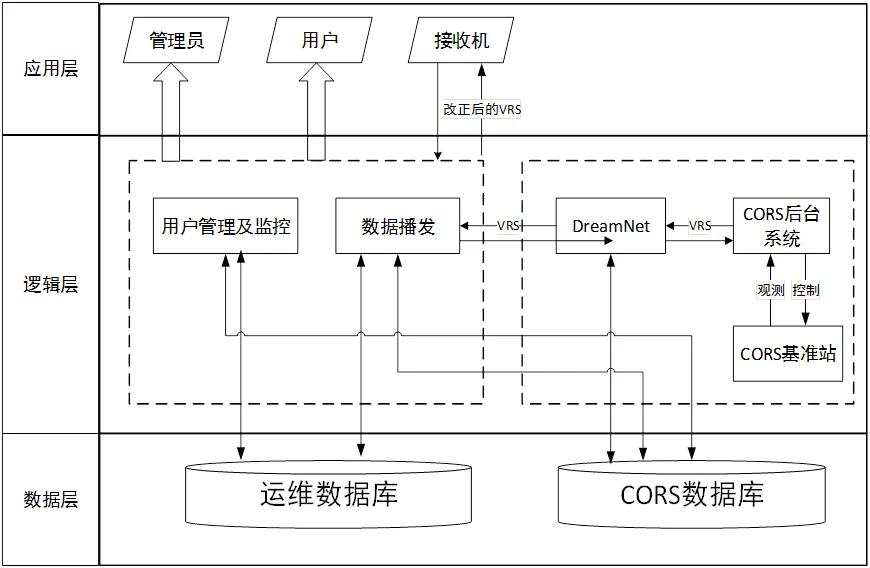
圖1 分布式服務(wù)子系統(tǒng)框架結(jié)構(gòu)圖
應(yīng)用層:主要面向應(yīng)用用戶,包括管理員用戶、普通用戶以及前端接收機(jī)等,用于處理與用戶的前端交互界面。
邏輯層:一是對各類數(shù)據(jù)請求進(jìn)行相應(yīng)的處理,包括負(fù)責(zé)向數(shù)據(jù)層發(fā)送數(shù)據(jù)請求或從數(shù)據(jù)層取得有關(guān)數(shù)據(jù)進(jìn)行統(tǒng)計查詢、顯示,進(jìn)行坐標(biāo)參數(shù)轉(zhuǎn)換;二是主動監(jiān)控CORS系統(tǒng)各部分的工作狀態(tài),包括用戶位置、軌跡、定位狀態(tài)和基站狀態(tài)等;三是生成系統(tǒng)的管理日志,并實時存儲到數(shù)據(jù)庫中去。
數(shù)據(jù)層:用來定義、維護(hù)、訪問和更新數(shù)據(jù)并管理和滿足應(yīng)用服務(wù)對數(shù)據(jù)的請求,該層負(fù)責(zé)解析業(yè)務(wù)邏輯層所發(fā)出的數(shù)據(jù)請求,執(zhí)行相關(guān)的操作。
分布式服務(wù)子系統(tǒng)的邏輯結(jié)構(gòu)主要由CORS基準(zhǔn)站、DreamNet服務(wù)器和南寧市測繪基準(zhǔn)網(wǎng)站服務(wù)器以及各種類型的用戶(包括RTK測量用戶、多終端管理用戶等)構(gòu)成,它們通過有線(以太網(wǎng))和無線(通信鏈路)進(jìn)行實時鏈接和數(shù)據(jù)傳輸。
2.2 CORS網(wǎng)絡(luò)RTK解算子系統(tǒng)架構(gòu)
北斗CORS網(wǎng)絡(luò)RTK解算子提供基于VRS技術(shù)的CORS運維管理功能,在DreamNet服務(wù)器與接收機(jī)用戶/WEB用戶之間加入一臺服務(wù)器,用戶直接與本服務(wù)器進(jìn)行連接享受各種服務(wù)。ORS基準(zhǔn)站與服務(wù)器之間通過專線網(wǎng)絡(luò)進(jìn)行連接,網(wǎng)站服務(wù)器和DreamNet服務(wù)器處于同一局域網(wǎng)內(nèi),通過路由器進(jìn)行數(shù)據(jù)交換,GIS用戶、RTK用戶和移動端用戶通過無線通訊基站與向服務(wù)器發(fā)送請求,而瀏覽器用戶直接通過以太網(wǎng)向服務(wù)器請求數(shù)據(jù)。其網(wǎng)絡(luò)拓?fù)鋱D如圖2所示。
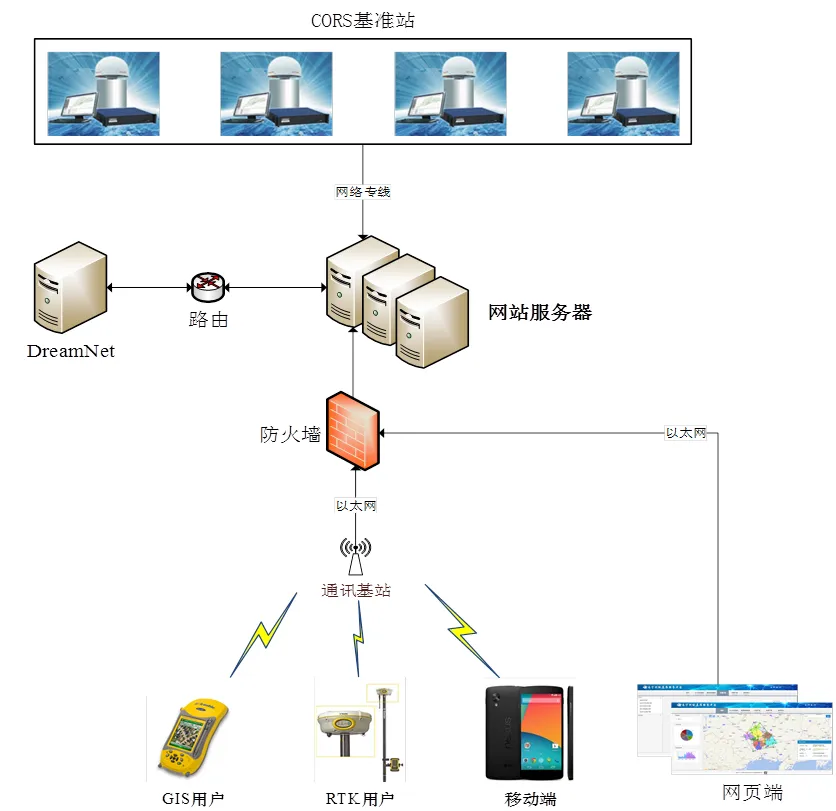
圖2 北斗CORS網(wǎng)絡(luò)RTK解算子系統(tǒng)結(jié)構(gòu)圖
2.3 平臺數(shù)據(jù)流設(shè)計
CORS基站接收衛(wèi)星信號并將數(shù)據(jù)實時發(fā)送到DreamNet服務(wù)器,DreamNet服務(wù)端進(jìn)行實時解算并建立覆蓋范圍內(nèi)的高精度模型。測量用戶在接入南寧市北斗位置綜合服務(wù)系統(tǒng)后,將觀測值按照NMEA的格式實時傳輸給網(wǎng)站服務(wù)器,網(wǎng)站服務(wù)器將數(shù)據(jù)流轉(zhuǎn)發(fā)給DreamNet服務(wù)器進(jìn)行計算,DreamNet服務(wù)端計算完成后,將VRS虛擬觀測值返回到網(wǎng)站服務(wù)器,網(wǎng)站服務(wù)器再以RTCM的格式播發(fā)給用戶,RTK用戶即可根據(jù)改正數(shù)得到實時高精度坐標(biāo)。此外,系統(tǒng)提供了Web和Android客戶端兩種方式的系統(tǒng)管理平臺,Web端用戶通過Http協(xié)議與服務(wù)器交互進(jìn)行查詢和管理操作,Android端用戶通過Webservice(SOAP/Http協(xié)議)與服務(wù)器進(jìn)行交互。
3 CORS分布式服務(wù)子系統(tǒng)設(shè)計
北斗CORS分布式服務(wù)子系統(tǒng)支持分布式部署架構(gòu),可以在云服務(wù)器上進(jìn)行拓展與部署,支持海量并發(fā)用戶。同時也支持將高精度數(shù)據(jù)推送至其他政府部門并監(jiān)管使用狀態(tài)。北斗CORS分布式服務(wù)子系統(tǒng)的核心在多線程高并發(fā)解算,其中多線程技術(shù)主要在解算模塊,以及對外播發(fā)模塊中完成,實現(xiàn)位置服務(wù)的穩(wěn)定可靠、高精度。在核心的解算模塊中,可以使用多線程技術(shù)實現(xiàn)星歷,同時獲取多系統(tǒng)多頻原始觀測值、相關(guān)配置參數(shù)等信息,減少解算時間,提高算法效率,進(jìn)而減少差分延時,提高用戶固定率。在播發(fā)模塊使用多線程技術(shù),支撐海量用戶請求及VRS數(shù)據(jù)的分配,大大降低播發(fā)端的壓力及提高播發(fā)效率。
4 CORS網(wǎng)絡(luò)RTK解算子系統(tǒng)
網(wǎng)絡(luò)CORS解算子系統(tǒng)支持VRS模式和格網(wǎng)化虛擬參考站的生成、存儲、播發(fā)。該子系統(tǒng)包含觀測數(shù)據(jù)與實時產(chǎn)品的接收模塊、數(shù)據(jù)預(yù)處理模塊、數(shù)據(jù)解算模塊。
4.1 觀測數(shù)據(jù)與實時產(chǎn)品接收模塊
4.1.1 數(shù)據(jù)獲取
系統(tǒng)能實現(xiàn)從IGS、CODE等外網(wǎng)服務(wù)器上下載數(shù)據(jù),準(zhǔn)備進(jìn)行解算需要的一些文件。如果軟件系統(tǒng)部署在內(nèi)網(wǎng),無法連接外網(wǎng)服務(wù)器,需要在一臺外網(wǎng)服務(wù)器中部署數(shù)據(jù)獲取部分的軟件,然后用同步軟件將文件同步到內(nèi)網(wǎng)服務(wù)器。數(shù)據(jù)獲取部分需要實現(xiàn)支持?jǐn)?shù)據(jù)解碼、支持觀測數(shù)據(jù)自動和手動下載、支持星歷數(shù)據(jù)自動和手動下載(包括精密星歷、DCB文件等等)、支持觀測數(shù)據(jù)定時和實時數(shù)據(jù)傳送、支持NTRIP和TCP/IP協(xié)議的觀測數(shù)據(jù)流的獲取、支持FTP協(xié)議和HTTP協(xié)議的觀測數(shù)據(jù)文件的獲取。同時,需要保證觀測數(shù)據(jù)文件存儲的完整性,類似于Storage Integrity,測站數(shù)據(jù)下載中斷恢復(fù)后,需要能補(bǔ)充或者恢復(fù)繼續(xù)下載。
4.1.2 數(shù)據(jù)檢查
軟件系統(tǒng)需要對進(jìn)行解算的數(shù)據(jù)進(jìn)行檢查。這包括衛(wèi)星系統(tǒng)類別、衛(wèi)星數(shù)量、觀測值類型、起止時間、數(shù)據(jù)完好率、采樣率、周跳率、多路徑影響和信噪比等信息的檢查,進(jìn)行實時或定時的計算分析,支持以圖表或者文件等形式輸出檢查結(jié)果。在發(fā)現(xiàn)數(shù)據(jù)質(zhì)量出現(xiàn)問題的時候,需要支持提供告警功能。需要支持GPS/BDS/GLONASS等多衛(wèi)星導(dǎo)航系統(tǒng)的數(shù)據(jù)質(zhì)量檢查,提供統(tǒng)計分析功能,支持按站和按時間兩種方式統(tǒng)計質(zhì)量情況。
4.1.3 數(shù)據(jù)存儲
軟件系統(tǒng)需要支持對觀測數(shù)據(jù)、星歷數(shù)據(jù)、結(jié)果數(shù)據(jù)等數(shù)據(jù)的存儲。這包括支持RINEX等多種文件格式,支持不同時間系統(tǒng)的選擇和不同采樣率(1 s、15 s、30 s)的采樣率設(shè)置,具備格式轉(zhuǎn)換、重采樣、歸檔和推送等功能,支持以圖表或文件等形式輸出存儲狀態(tài),支持虛擬格網(wǎng)點的存儲,支持多時間系統(tǒng)或目錄格式存儲,以及格網(wǎng)點存儲配置(設(shè)置點位坐標(biāo)、采樣率等,需要支持RINEX格式里的o文件、d文件以及壓縮格式文件等),以及支持多站數(shù)據(jù)存儲同時配置。
4.2 數(shù)據(jù)預(yù)處理模塊
由于地面流動用戶在接收導(dǎo)航衛(wèi)星信號的過程中需要保持對特定的衛(wèi)星的連續(xù)跟蹤,但是跟蹤的過程中難免出現(xiàn)衛(wèi)星信號被建筑物、植被等遮擋,或跟蹤衛(wèi)星出現(xiàn)故障,或受到與定位導(dǎo)航信號頻率相近的其它電磁波干擾的情況,接收機(jī)可能會出現(xiàn)失鎖,其內(nèi)部的整周計數(shù)器無法連續(xù)計數(shù);接收機(jī)持續(xù)性地測量載波相位值時,由于某些因素使得整周計數(shù)出現(xiàn)問題,測得的相位觀測值相比準(zhǔn)確值出現(xiàn)幾個整數(shù)周的跳躍,稱為周跳[1]。進(jìn)行周跳探測的方法有多種,具體有多項式擬合法[2]、高次差法[3]、電離層殘差法[4]等。當(dāng)信號被接收機(jī)重新鎖定后,載波相位觀測量的整周部分必然錯誤,但是不到一周的小數(shù)部分任然保持正確。在正式解算之前需要將周跳探測出來,并加以標(biāo)記,這就是數(shù)據(jù)預(yù)處理的主要操作。
4.2.1 M-W法
M-W法的實質(zhì)是通過雙頻的寬巷相位觀測值和窄巷的偽距觀測值的線性組合,將寬巷模糊度作為統(tǒng)計檢驗量,如式1所示:

其中N、λ分別表示寬巷觀測值的整周模糊度、寬巷觀測值的波長,1、2、1、2、1、2分別表示雙頻偽距、相位觀測值,以及觀測值所在頻點的頻率。從式(1)可以看出檢驗量不受基線長度、電離層以及接收機(jī)運動狀態(tài)的影響。需要注意的是當(dāng)兩個頻率上的載波發(fā)生相同大小的周跳,M-W失效。
4.2.2 電離層殘差法
電離層殘差法是美國學(xué)者Goad在1986年提出的,它主要是考察不同歷元之間電離層殘差的變化[5]。該方法認(rèn)為在電離層較穩(wěn)定的情況下,若沒有周跳發(fā)生,相鄰歷元的電離層殘差統(tǒng)計量應(yīng)該比較穩(wěn)定,不會出現(xiàn)階躍的情況,于是通過檢驗各個歷元電離層殘差值,達(dá)到周跳探測的目的。
本文在軟件實現(xiàn)的時候采用電離層二次差作為統(tǒng)計量,基于實時探測模式探測周跳,即同時存儲三個歷元、-1、-2的觀測數(shù)據(jù),其中表示當(dāng)前觀測歷元,當(dāng)歷元疑似為周跳時,等待歷元+1的觀測數(shù)據(jù),然后構(gòu)建計算歷元-1、、+1的電離層二次差,判斷歷元是否確實出現(xiàn)周跳。其原理如下:
若不考慮多路徑效應(yīng)、觀測噪聲等因素的影響,當(dāng)前觀測歷元的雙頻載波相位之差為:

同理可得歷元-1的雙頻載波相位之差,若歷元未發(fā)生周跳,由()與(-1)的差值可得:

表示歷元與歷元-1的電離層殘差一次差。
同理可得(-1)與(-2)的差值:


4.3 數(shù)據(jù)解算模塊
數(shù)據(jù)解算處理模式支持多種定位模式,包括單站模式、RTD模式、RTK模式、網(wǎng)絡(luò)化模式和VRS模式。支持站點、衛(wèi)星導(dǎo)航系統(tǒng)、高度角、星歷、鐘差和解算模型等參數(shù)設(shè)置。支持精密星歷、IONEX、DCB等文件的讀取,具備選擇不同的網(wǎng)解模式,支持多種電離層和對流層模型的選擇、實時顯示解算狀態(tài)、以數(shù)據(jù)流或文件等方式輸出結(jié)果。站點坐標(biāo)解算模塊支持實時和事后觀測數(shù)據(jù)的計算,支持選擇多種解算方式,支持以圖表或者文件等形式輸出解算結(jié)果。
5 結(jié)束語
北斗CORS實時高精度自主解算服務(wù)云平臺的研發(fā)可有效提高測繪作業(yè)效率,降低測繪作業(yè)成本,研究成果可應(yīng)用于高精度導(dǎo)航定位、精密監(jiān)測等城市建設(shè)、城市管理等諸多領(lǐng)域,極大地節(jié)約了政府服務(wù)部門行政成本和測繪企業(yè)的運營成本。
[1]王仁謙,朱建軍. 利用雙頻載波相位觀測值求差的方法探測與修復(fù)周跳[J]. 測繪通報,2004(6): 9-11.
[2]李江衛(wèi). GPS 相位觀測值中周跳的探測與修復(fù)算法研究[D]. 武漢: 武漢大學(xué),2004.
[3]嚴(yán)新生,王一強(qiáng),白征東,等. 聯(lián)合使用高次差法和TurboEdit 法自動探測修復(fù)周跳[J]. 測繪通報,2007(9): 5-9.
[4]王維,王解先,高俊強(qiáng). GPS 周跳探測的方法研究[J]. 武漢大學(xué)學(xué)報(信息科學(xué)版),2010,35(6): 687-290.
[5]彭磊,任立華,黃真輝. 多頻電離層殘差法用于周跳的探測與修復(fù)[J]. 測繪工程,2014(12): 35-38.
Research on Real-Time High Precision Autonomous Calculating Platform of CORS
As the construction of Beidou 3 network enters the final stage, the GNSS application market with Beidou as the core will usher in a period of rapid development. However, the existing CORS system is limited by algorithm, and it is difficult to meet the demands of massive users for high concurrent applications, which restricts the comprehensive promotion and application of the CORS system. This paper puts forward the technical route of establishing CORS real-time and high-precision autonomous calculating platform, expounds the design idea of the platform from three aspects of the overall platform architecture, CORS distributed service subsystem, and the CORS network RTK solution operator system, optimizes the data solution algorithm of CORS system, and solves the problem of high concurrent applications of CORS massive users.
CORS; independent calculating; platform
P22
A
1008-1151(2022)10-0014-03
2022-05-30
馮振儉(1989-),男,南寧市自然資源信息集團(tuán)有限公司注冊測繪師,從事自然資源信息化前沿技術(shù)研究和成果轉(zhuǎn)化工作。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
創(chuàng)業(yè)家(2015年10期)2015-02-27 07:55:08
