無人機(jī)測(cè)繪數(shù)據(jù)處理技術(shù)及其應(yīng)用探討
2022-11-10 03:45:18鐘金杏緱武龍謝英凱
數(shù)字通信世界 2022年10期
關(guān)鍵詞:數(shù)據(jù)處理測(cè)繪
鐘金杏,王 晶,緱武龍,謝英凱
(1.高州市自然資源局(高州市不動(dòng)產(chǎn)登記中心),廣東 高州 525200;2.廣東友元國土信息工程有限公司,廣東 廣州 510630;3.廣州愛遠(yuǎn)土地房地產(chǎn)評(píng)估有限公司,廣東 廣州 510630;4.廣州市華南自然資源科學(xué)技術(shù)研究院,廣東 廣州 510630)
1 無人機(jī)測(cè)繪數(shù)據(jù)處理技術(shù)
1.1 DOM及DEM技術(shù)
DOM技術(shù)也稱數(shù)字正射影像技術(shù),該技術(shù)按照特定圖幅范圍,對(duì)數(shù)字微分進(jìn)行糾正、鑲嵌、裁剪形成數(shù)字正射影像集,同時(shí)具備影像特征及地圖幾何精度特點(diǎn)[1]。DEM技術(shù)全稱為數(shù)字高程模型技術(shù),是基于有限地形高程數(shù)據(jù),構(gòu)建地面地形數(shù)字化模型(一組有序數(shù)值陣列形式),實(shí)現(xiàn)數(shù)字化表達(dá)的一種技術(shù)[2]。無人機(jī)測(cè)繪使用DEM技術(shù)的原理是:在空三加密基礎(chǔ)上,實(shí)現(xiàn)原始影像數(shù)據(jù)的重采樣,生產(chǎn)核線影像,通過系統(tǒng)自動(dòng)匹配功能與三維離散點(diǎn)相互匹配,得到DSM后濾波處理獲得DEM。DEM與DOM相互影響,只有高精準(zhǔn)度DEM才能保障DOM的高精度,特別是對(duì)一些陡壁、高架橋等特殊區(qū)域,需要手動(dòng)添加特征線,單純依靠人工鑲嵌處理,工作量大,因此要盡可能規(guī)避這些建筑物,保障DOM接邊精度達(dá)標(biāo)。
1.2 空中三角測(cè)量
空中三角測(cè)量簡稱空三加密,是通過航攝影片與被攝對(duì)象間的空間幾何關(guān)系,結(jié)合少量已知地面控制點(diǎn),利用最小二乘法原理,快速求解影像自動(dòng)加密問題,建立實(shí)地模型,獲得測(cè)點(diǎn)高程與平面坐標(biāo)的技術(shù)手段,是數(shù)字測(cè)繪產(chǎn)品的核心[3]。在系統(tǒng)中,空三加密應(yīng)用流程如下。
(1)相對(duì)定向,利用計(jì)算機(jī)視覺算法進(jìn)行匹配,確定相片關(guān)系。
(2)絕對(duì)定向,采用像控點(diǎn)+平差計(jì)算,將相對(duì)定向確定的相片關(guān)系解算至特定坐標(biāo)系統(tǒng)內(nèi),建立傳感器、影像、地面數(shù)學(xué)關(guān)聯(lián)。在進(jìn)行空三計(jì)算時(shí),會(huì)分別生成地面及空中三空,以地面部分點(diǎn)位為控制點(diǎn),結(jié)合外業(yè)實(shí)測(cè)像控點(diǎn)剛性配準(zhǔn),生成新的空三,然后將地面及空中三空相互結(jié)合,優(yōu)化后獲得完整空三測(cè)量報(bào)告。
1.3 相機(jī)校驗(yàn)
無人機(jī)在測(cè)繪過程中,非測(cè)量相機(jī)屬于必要搭載設(shè)備,其主距f和像主點(diǎn)在像片中心坐標(biāo)系內(nèi)的坐標(biāo)位置無法通過直接量測(cè)獲得,必須預(yù)先定好原點(diǎn)坐標(biāo)。非測(cè)量相機(jī)在實(shí)際應(yīng)用過程中存在一定不足,如鏡頭畸變差大、像幅小、數(shù)量多。以頭畸變差大為例,會(huì)導(dǎo)致測(cè)量像點(diǎn)坐標(biāo)偏差,繼而破壞像點(diǎn)、投影中心及對(duì)應(yīng)物方點(diǎn)之間的共線關(guān)系、物方坐標(biāo)解算精度等,需要及時(shí)采取措施進(jìn)行校正[4]。常用相機(jī)校正方法有自檢校法、試驗(yàn)場(chǎng)檢校法、多像滅點(diǎn)檢校法。
1.4 PPK技術(shù)
PPK技術(shù),全稱為動(dòng)態(tài)后處理技術(shù),是GPS技術(shù)的一種,主要通過載波相位進(jìn)行事后差分。工作原理是:利用同步觀測(cè)基準(zhǔn)站接收機(jī)和流動(dòng)站接收機(jī)觀測(cè)衛(wèi)星載波相位觀測(cè)量,在計(jì)算機(jī)內(nèi)利用GPS處理軟件進(jìn)行處理,線性組合后形成虛擬載波相位觀測(cè)量,確定接收機(jī)相互之間的關(guān)系,經(jīng)坐標(biāo)轉(zhuǎn)換后獲得流動(dòng)站坐標(biāo)[5]。該技術(shù)優(yōu)勢(shì)較為突出,主要體現(xiàn)在:①外界環(huán)境干擾小;②作業(yè)半徑大,達(dá)到30 km;③定位精度高,精度可達(dá)5 mm,誤差不傳播,不累積,能夠獲得高精度姿態(tài)信息(ψ,ω,κ),應(yīng)用于空中三角測(cè)量中。
2 無人機(jī)測(cè)繪數(shù)據(jù)處理技術(shù)應(yīng)用領(lǐng)域
2.1 地形測(cè)繪
無人機(jī)測(cè)繪數(shù)據(jù)處理技術(shù)可應(yīng)用于地形測(cè)繪工作中,主要工作流程是:由無人機(jī)攝影獲取數(shù)據(jù),GPSRTK及全站儀獲得外業(yè)數(shù)據(jù),利用DPS系統(tǒng)、空三加密、相片控制點(diǎn)等處理數(shù)據(jù)和進(jìn)行測(cè)繪精度試驗(yàn),確定該無人機(jī)測(cè)繪方法能滿足地形測(cè)繪實(shí)際需求。以無人機(jī)傾斜攝影測(cè)繪1:500地形精度測(cè)繪為例,作業(yè)步驟是:項(xiàng)目任務(wù)確定→空域申請(qǐng)→航線設(shè)計(jì)→無人機(jī)航空攝影→數(shù)據(jù)檢查→影像處理→提交結(jié)果。在無人機(jī)實(shí)飛之前,做好前提準(zhǔn)備工作,選擇適宜攝影時(shí)間、起落點(diǎn)位置等,如12月晴朗,適合攝影時(shí)間段[6],上報(bào)至空域部門進(jìn)行申請(qǐng);申請(qǐng)通過后,正式開始無人機(jī)飛行攝影。本項(xiàng)目選用Phantom 4 Pro型號(hào)的無人機(jī),搭載傳感器后進(jìn)行飛行;在飛行階段需確定相片重合度、航線、航高等參數(shù),其中,相片重合度可參考相關(guān)規(guī)范,將航向重疊度和旁向重疊度分別控制在60%~80%、15%~60%;航高(H)需要計(jì)算得出,公式為

式中,f為鏡頭焦距(mm);GDS為地面分辨率(1:500地形圖地面分辨率不超過0.05m);a為像元尺寸大小(mm2)。
無人機(jī)航空攝影完成后,通過數(shù)據(jù)預(yù)處理、空三加密、立體測(cè)圖等處理后,構(gòu)建實(shí)景三維模型,繪制地形圖,完成地形測(cè)繪工作。具體如下。
(1)數(shù)據(jù)預(yù)處理。將拍攝到的正射、斜射影像導(dǎo)入軟件,自動(dòng)檢查攝影信息,去除不合規(guī)影像,添加相機(jī)參數(shù),完成相片自動(dòng)矯正[7]。編輯控制點(diǎn),注明控制點(diǎn)位置信息,添加對(duì)應(yīng)影像,點(diǎn)擊保存后進(jìn)行空三解算,完成數(shù)據(jù)預(yù)處理。
(2)空三加密。該地形圖為1:500,在前期攝影過程中,完成空三加密信息、相片控制點(diǎn)信息、測(cè)圖信息等搜集工作,以測(cè)量控制點(diǎn)位標(biāo)準(zhǔn),對(duì)數(shù)據(jù)進(jìn)行精度分析。在對(duì)具體空三加密量測(cè)控點(diǎn)期間,要綜合判斷點(diǎn)位位置,篩選處個(gè)別錯(cuò)點(diǎn)、上下航線同名目標(biāo)等,保障點(diǎn)位準(zhǔn)確,并嚴(yán)格控制相對(duì)定向環(huán)節(jié)連接點(diǎn)上下視差中誤差。分析發(fā)現(xiàn),空三加密點(diǎn)最大高程及平面誤差為0.2 m、0.163 m,中誤差分別為+0.1 m、+0.04 m;在進(jìn)行檢點(diǎn)數(shù)據(jù)分析的過程中,發(fā)現(xiàn)高程及平面的最大誤差、中誤差分別為0.27 m、0.237 m,0.13 m、+0.105 m,誤差值均在行業(yè)規(guī)范允許范圍內(nèi),說明在空三加密方面,該無人機(jī)攝影技術(shù)提供的技能,能夠滿足1:500地形圖精度需求。
(3)三維模型及地形圖編輯。在系統(tǒng)中加載三維實(shí)景模型,結(jié)合數(shù)字化技術(shù),完成地物要素采集工作,并將對(duì)應(yīng)位置信息與控制點(diǎn)數(shù)據(jù)相互對(duì)比,發(fā)現(xiàn)地物要素平面坐標(biāo)誤差為0~0.11 m,中誤差為0.06 m,高程中誤差為0.07 m,在1:500地形圖允許誤差范圍內(nèi),即平面、高程中誤差分別<0.2 m,<0.2 m(平原)、<0.4 m(丘陵),均符合地形圖測(cè)繪精度要求。同時(shí),重視地形圖編輯工作,及時(shí)修改航內(nèi)判讀不清晰、不準(zhǔn)確數(shù)據(jù),修改不存在的地貌要素;在對(duì)所有圖幅進(jìn)行拼接處理時(shí),需要確保各個(gè)線狀要素完整,組好街道、街區(qū)總接邊;及時(shí)清理垃圾數(shù)據(jù),如多余層、塊及線型等;對(duì)所有圖形均做好圖面檢查工作,確保數(shù)據(jù)準(zhǔn)確。
2.2 環(huán)境監(jiān)測(cè)
無人機(jī)測(cè)繪數(shù)據(jù)處理技術(shù)在環(huán)境監(jiān)測(cè)領(lǐng)域有較為廣泛的應(yīng)用,可用于航測(cè)影像快速獲取和處理,且獲取影像精度高,便于相關(guān)人員全面掌握區(qū)域環(huán)境污染程度和排污情況,增加環(huán)境保護(hù)工作成效[8]。以空氣質(zhì)量檢測(cè)為例,在無人機(jī)內(nèi)搭載氣體傳感器,用于收集各種基本信息,如氣體實(shí)時(shí)濃度、溫濕度、PM2.5、經(jīng)緯度、高度等,顯示實(shí)時(shí)監(jiān)測(cè)數(shù)據(jù),勘察歷史數(shù)據(jù),并生成曲線分析圖,便于對(duì)比查看,如對(duì)100 h內(nèi)PM2.5、PM10、NO2、CO、SO2等實(shí)時(shí)監(jiān)測(cè)數(shù)據(jù)和國控點(diǎn)數(shù)據(jù)進(jìn)行比對(duì),確定一段時(shí)間內(nèi),空氣環(huán)境質(zhì)量;還可以通過無線傳輸方式將數(shù)據(jù)傳輸至地面端,進(jìn)行后續(xù)數(shù)據(jù)處理。工作流程是:打開氣體傳感器、上位機(jī)發(fā)送命令、自動(dòng)識(shí)別氣體名稱和量程、反饋實(shí)時(shí)氣體濃度、處理采集到的各種數(shù)據(jù)、關(guān)閉氣體傳感器,在這一數(shù)據(jù)處理環(huán)節(jié)中,倘若發(fā)現(xiàn)氣體濃度超標(biāo),會(huì)自動(dòng)報(bào)警,聯(lián)系責(zé)任人進(jìn)行處理。另外,在環(huán)境監(jiān)測(cè)領(lǐng)域,無人機(jī)測(cè)繪數(shù)據(jù)處理技術(shù)還可用于固定污染源監(jiān)測(cè)、海洋監(jiān)測(cè)、濕地監(jiān)測(cè)等領(lǐng)域。
2.3 災(zāi)情救援
縱觀近些年我國自然災(zāi)害發(fā)生情況,發(fā)現(xiàn)災(zāi)害發(fā)生頻率越來越高,如暴雨災(zāi)害、地震災(zāi)害、洪澇災(zāi)害等,屢見報(bào)端,各種災(zāi)害后救援工作開始成為社會(huì)各界關(guān)注的重點(diǎn)。在這種情況下,將無人機(jī)測(cè)繪數(shù)據(jù)處理技術(shù)應(yīng)用其中,發(fā)揮關(guān)鍵作用,不僅能提升救援工作便利性,還能提高救援效率,拯救更多生命[9]。例如,基于無人機(jī)測(cè)繪攝影的應(yīng)急數(shù)據(jù)處理技術(shù),主要使用軟件為Pix4Dmapper,包含高精度和快速處理兩種模式,可根據(jù)實(shí)際情況,選擇相應(yīng)模式,完成數(shù)據(jù)處理,獲得測(cè)繪產(chǎn)品。項(xiàng)目開展地區(qū)為某平原,測(cè)區(qū)面積共50 km2,在設(shè)計(jì)規(guī)劃的航攝區(qū)域和航線中,東西方向和南北方向相對(duì)航高為2000 m、1000 m,航向重疊70%,旁向重疊40%。采用無人機(jī)掛載飛思相機(jī)(焦距為50 mm、分辨率為10328×7760)完成數(shù)據(jù)處理,共拍攝相片數(shù)量為171張,10 cm分辨率測(cè)區(qū)面積為20 km2,相片數(shù)為126張;200 cm分辨率測(cè)區(qū)面積為30 km2,相片數(shù)為45張,獲得數(shù)據(jù)導(dǎo)入系統(tǒng)后處理。
該軟件數(shù)據(jù)快速處理流程是:POS數(shù)據(jù)準(zhǔn)備與處理;新建工程,加載相片數(shù)據(jù)和POS數(shù)據(jù);設(shè)置處理參數(shù);一鍵處理數(shù)據(jù),輸出DOM成果、DSM成果、空三成果、點(diǎn)云數(shù)據(jù)成果。數(shù)據(jù)處理完成后,對(duì)其成果進(jìn)行檢驗(yàn)。從處理模式及成果看,分別進(jìn)行1:1000和1:2000成圖測(cè)試,基于原始數(shù)據(jù)量進(jìn)行處理后(1:1000原始數(shù)據(jù)數(shù)據(jù)量為28.2 GB;1:2000原始數(shù)據(jù)數(shù)據(jù)量為10.1 GB;),發(fā)現(xiàn)處理后成圖后匹配點(diǎn)數(shù)量多且均勻(空三成果),點(diǎn)云加密可匹配得到高密度點(diǎn)云,生成10 cm和20 cm的DOM和DSM,成圖精度大大提升。最終生成的測(cè)繪產(chǎn)品質(zhì)量高,圖像無扭曲、拉花現(xiàn)象,顏色均勻,放大后,邊緣清晰可見,無錯(cuò)位。同時(shí),根據(jù)軟件生成精度報(bào)告可見,無論1:1000還是1:2000,其高程及平面精度均在應(yīng)急測(cè)繪數(shù)據(jù)處理范圍內(nèi),如1:1000成圖高程精度<0.643 m,平面精度<0.465。但是,兩者實(shí)際處理效率,對(duì)應(yīng)原始數(shù)據(jù)大小及輸出成果等存在差異(具體見表1),倘若應(yīng)用于災(zāi)害救援,對(duì)精度要求不高,可適當(dāng)降低參數(shù)要求,提升處理效率,以便快速獲得成果。
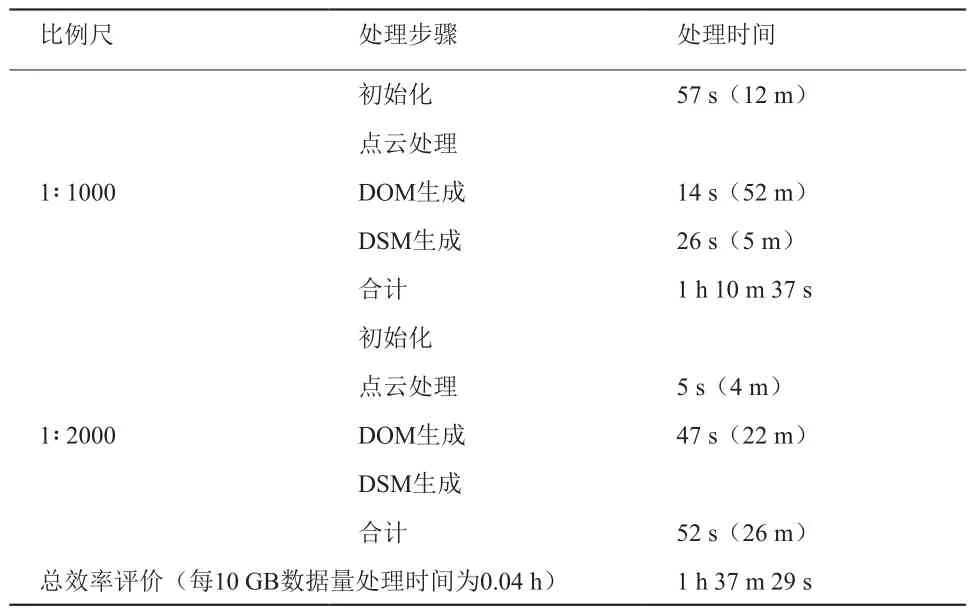
表1 不同比例尺產(chǎn)品數(shù)據(jù)處理效率及精度比較
3 結(jié)束語
綜上所述,伴隨無人機(jī)測(cè)繪數(shù)據(jù)處理技術(shù)快速發(fā)展,DOM及DEM技術(shù)、空中三角測(cè)量、相機(jī)校驗(yàn)、PPK技術(shù)等也隨之成熟,技術(shù)優(yōu)勢(shì)進(jìn)一步突顯,其應(yīng)用范圍也不斷擴(kuò)大,在地形測(cè)繪、環(huán)境監(jiān)測(cè)、災(zāi)情救援等領(lǐng)域中廣泛應(yīng)用,能夠用于不同區(qū)域數(shù)據(jù)和信息的有效、快速采集與數(shù)據(jù)處理,并得到了十分積極的反饋。未來,無人機(jī)測(cè)繪數(shù)據(jù)處理技術(shù)仍將有極大發(fā)展空間,應(yīng)加強(qiáng)技術(shù)研究與實(shí)踐,最大化發(fā)揮其積極價(jià)值。■
猜你喜歡
心理學(xué)報(bào)(2022年4期)2022-04-12 07:38:02
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
當(dāng)代化工研究(2016年9期)2016-03-20 16:22:13
衛(wèi)星與網(wǎng)絡(luò)(2015年12期)2015-10-27 02:21:46
西華師范大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年3期)2015-02-27 15:31:22