基于遺傳算法的護(hù)理機(jī)器人逆運(yùn)動(dòng)學(xué)求解方法
2022-11-09 09:59:50張立博李宇鵬朱德明付永領(lǐng)
北京航空航天大學(xué)學(xué)報(bào) 2022年10期
關(guān)鍵詞:護(hù)理
張立博 李宇鵬 朱德明 付永領(lǐng)
(北京航空航天大學(xué) 機(jī)械工程及自動(dòng)化學(xué)院, 北京 100083)
由于全球老齡化日益嚴(yán)重,未來(lái)老年人的護(hù)理問(wèn)題變得十分嚴(yán)峻,隨著現(xiàn)階段人工智能技術(shù)的發(fā)展,護(hù)理機(jī)器人投入醫(yī)療護(hù)理領(lǐng)域,可以減輕護(hù)理人員負(fù)擔(dān),提高護(hù)理人員的工作效率,一定程度上可以解決護(hù)理對(duì)象的自理能力[1]。 護(hù)理任務(wù)中,護(hù)理機(jī)器人工作需要雙臂和腰部的協(xié)調(diào)操作才能將病人抱舉,而且所處的環(huán)境一般比較復(fù)雜,抱起沉重的病人很容易發(fā)生二次傷害[2]。
護(hù)理機(jī)器人系統(tǒng)存在著多變量、強(qiáng)耦合、高階及非線性等特性,這些特性使得對(duì)護(hù)理機(jī)器人的逆運(yùn)動(dòng)學(xué)精確求解變得非常困難[3],特殊的結(jié)構(gòu)沒(méi)有非常滿意的傳統(tǒng)解法,各種算法根據(jù)自身的特點(diǎn)去解決特定結(jié)構(gòu)形式的機(jī)器人[4-5]。 對(duì)于串聯(lián)機(jī)器人來(lái)說(shuō)逆運(yùn)動(dòng)學(xué)解比較復(fù)雜,根據(jù)結(jié)構(gòu)的復(fù)雜程度不同求解難度也不同,基本原理都是根據(jù)結(jié)構(gòu)參數(shù),由機(jī)械臂末端位姿矩陣求解各關(guān)節(jié)的轉(zhuǎn)動(dòng)角度值[6-7]。 特定的結(jié)構(gòu)可以采用現(xiàn)有方法直接求解,如三軸交于一點(diǎn)的結(jié)構(gòu)一般用PIEPER 法進(jìn)行研究[8-9]。 Pieper[10]證明了當(dāng)機(jī)器人有3 個(gè)相鄰關(guān)節(jié)軸相交于一點(diǎn)時(shí),一定存在解析形式的逆解。 Duffy[11]證明了當(dāng)3 個(gè)相鄰的關(guān)節(jié)軸互相平行時(shí),也一定存在解析形式的解。Goldenberg 等[12]提出了一種基于新的快速收斂約束非線性優(yōu)化算法,適用于任意自由度的旋轉(zhuǎn)或棱柱關(guān)節(jié)機(jī)器人。 Ayusawa 和Nakamura[13]提出了一種快速逆運(yùn)動(dòng)學(xué)算法,先將殘差視為外力并分布到每個(gè)環(huán)節(jié)再利用牛頓-歐拉遞推算法從靜態(tài)平衡點(diǎn)計(jì)算梯度。 Manocha 和Canny[14]提出了一種通用六自由度機(jī)械臂的高效逆運(yùn)動(dòng)學(xué)算法及其實(shí)現(xiàn),利用系統(tǒng)的代數(shù)性質(zhì)通過(guò)降階來(lái)計(jì)算特征值問(wèn)題。 護(hù)理機(jī)器人結(jié)構(gòu)復(fù)雜,而且大小臂軸線相錯(cuò),幾何結(jié)構(gòu)不滿足PIEPER 準(zhǔn)則,代數(shù)法和幾何法不能很好解決逆運(yùn)動(dòng)學(xué)解問(wèn)題。 遺傳算法的隱含并行性,讓其在搜索過(guò)程中具有實(shí)時(shí)性,從而能夠快速地找到合適的解[15]。 針對(duì)遺傳算法在實(shí)際應(yīng)用中出現(xiàn)早熟收斂和局部搜索能力較弱的缺點(diǎn),文獻(xiàn)[16]在簡(jiǎn)單遺傳算法的基礎(chǔ)上改進(jìn)了交叉變異算子,改進(jìn)了適應(yīng)度函數(shù)排序方法;文獻(xiàn)[17]通過(guò)改進(jìn)交叉、變異算子自整定策略和精英策略,提高了算法的收斂速度;文獻(xiàn)[18]通過(guò)優(yōu)化選擇算子和變異算子提高了算法搜索速度并保證全局最優(yōu)性,具有更快的搜索速度和全局最優(yōu)性。
為了解決護(hù)理機(jī)器人手臂末端位姿誤差較大的問(wèn)題,本文在分析結(jié)構(gòu)約束關(guān)系的基礎(chǔ)上,基于遺傳算法提出了護(hù)理機(jī)器的腰臂耦合逆解算法,對(duì)解進(jìn)行了合理的規(guī)劃,使求解過(guò)程更為精確。
1 正向運(yùn)動(dòng)學(xué)分析
護(hù)理機(jī)器人正向運(yùn)動(dòng)學(xué)分析是遺傳算法求解逆運(yùn)動(dòng)學(xué)的基礎(chǔ),需要依據(jù)正運(yùn)動(dòng)學(xué)和機(jī)器人末端位姿坐標(biāo)系對(duì)逆運(yùn)動(dòng)學(xué)進(jìn)行求解。
1.1 護(hù)理機(jī)器人結(jié)構(gòu)
本文研究的護(hù)理機(jī)器人為移動(dòng)式仿人雙臂機(jī)器人,實(shí)體樣機(jī)如圖1 所示,由4 個(gè)全向輪、底盤(pán)框架、腰部、雙臂和手掌部分組成,具有輪式機(jī)器人和雙足機(jī)器人的優(yōu)點(diǎn)。 采用全向輪的底盤(pán),靈活便于控制,穩(wěn)定性良好,與軀干機(jī)械臂組合成復(fù)合式機(jī)器人系統(tǒng),既增加了護(hù)理機(jī)器人的靈活使用性,又拓展了其工作范圍。 護(hù)理機(jī)器人共有15 個(gè)自由度,為高階非線性耦合系統(tǒng),底盤(pán)具有3 個(gè)自由度可實(shí)現(xiàn)整體縱、橫和回轉(zhuǎn)運(yùn)動(dòng),腰部1 個(gè)俯仰自由度和1 個(gè)側(cè)傾自由度,每條手臂有5 個(gè)自由度。

圖1 護(hù)理機(jī)器人樣機(jī)Fig.1 Nursing robot prototype
1.2 連桿坐標(biāo)系的建立
首先,為每個(gè)桿件建立相對(duì)的參考坐標(biāo)系,確定從一個(gè)坐標(biāo)到下一個(gè)坐標(biāo)的變換步驟。 然后,從基座的第一個(gè)桿件依次變換結(jié)合起來(lái),得到機(jī)器人的總變換矩陣,建立最終的運(yùn)動(dòng)方程,從而求解機(jī)器人的位姿。
根據(jù)D-H 連桿坐標(biāo)系建立機(jī)器人運(yùn)動(dòng)學(xué)模型,固連在連桿i上的固連坐標(biāo)系稱為{i},關(guān)節(jié)軸i-1 和關(guān)節(jié)軸i之間公垂線的長(zhǎng)度為ai-1即連桿長(zhǎng)度;夾角為αi-1;公垂線ai-1與關(guān)節(jié)軸i的交點(diǎn)到公垂線ai與關(guān)節(jié)軸i的交點(diǎn)的有向距離為連桿偏距di,ai-1的延長(zhǎng)線和ai之間繞關(guān)節(jié)軸i旋轉(zhuǎn)所形成的夾角為關(guān)節(jié)角θi。 圖2 為護(hù)理機(jī)器人各連桿的連桿坐標(biāo)系,腰部關(guān)節(jié)的自由度分別為俯仰關(guān)節(jié)轉(zhuǎn)角θ1和側(cè)傾關(guān)節(jié)轉(zhuǎn)角θ2,左臂各關(guān)節(jié)的轉(zhuǎn)角分別為θl3、θl4、θl5、θl6和θl7,右臂各關(guān)節(jié)的轉(zhuǎn)角分別為θr3、θr4、θr5、θr6和θr7。
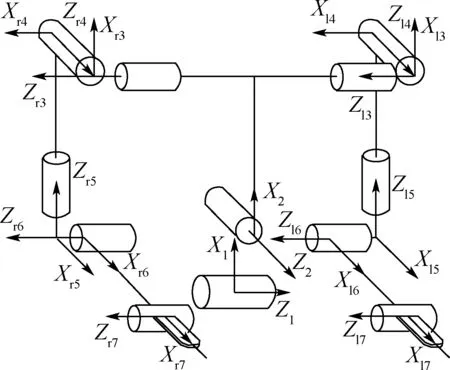
圖2 護(hù)理機(jī)器人各連桿的連桿坐標(biāo)系Fig.2 Linkage coordinate system of each linkage of nursing robot
考慮護(hù)理機(jī)器人初始狀態(tài)各肢體的相對(duì)位置,基于D-H 模型,可以得到護(hù)理機(jī)器人運(yùn)動(dòng)學(xué)的連桿參數(shù),如表1 所示。

表1 護(hù)理機(jī)器人運(yùn)動(dòng)學(xué)連桿參數(shù)Table 1 Nursing robot kinematic linkage parameters
根據(jù)連桿坐標(biāo)系模型的連桿參數(shù)計(jì)算出連桿的變換矩陣,從基座到末端把相應(yīng)的連桿變換矩陣依次相乘得到坐標(biāo)系{N}相對(duì)于坐標(biāo)系{0}的變換矩陣:

2 個(gè)桿件的坐標(biāo)系在世界坐標(biāo)系中相互變化時(shí),在坐標(biāo)系沒(méi)有相對(duì)運(yùn)動(dòng)的情況下,通過(guò)2 次平移和1 次旋轉(zhuǎn)后2 個(gè)坐標(biāo)系可以重合。 建立各桿件相對(duì)應(yīng)的齊次坐標(biāo)變換矩陣,并將其定義為T(mén)矩陣。

其變換矩陣為

建立護(hù)理機(jī)器人各桿件相對(duì)應(yīng)的齊次坐標(biāo)變換矩陣,得到護(hù)理機(jī)器人的正運(yùn)動(dòng)學(xué)方程為

通過(guò)對(duì)雙臂結(jié)構(gòu)的分析可以將主體結(jié)構(gòu)分解為具有對(duì)稱結(jié)構(gòu)的獨(dú)立單臂在前2 個(gè)關(guān)節(jié)處重合形成的耦合結(jié)構(gòu)。 分解后的左右機(jī)械臂末端的手腕坐標(biāo)系在世界坐標(biāo)系中的位置和姿態(tài)為

1.3 正運(yùn)動(dòng)學(xué)的仿真
護(hù)理機(jī)器人的運(yùn)動(dòng)學(xué)模型通過(guò)MATLAB 中的機(jī)器人工具箱得到運(yùn)動(dòng)過(guò)程的位姿圖,輸出的位姿矩陣可以用來(lái)驗(yàn)證所建立的機(jī)器人運(yùn)動(dòng)學(xué)模型的有效性和正確性。
將機(jī)器人初始狀態(tài)的各關(guān)節(jié)轉(zhuǎn)角值代入式(5)和式(6)中,利用MATLAB 的矩陣計(jì)算分別計(jì)算出機(jī)械臂的末端手腕關(guān)節(jié)的位姿矩陣為

將模型參數(shù)代入Roboticstoolbox 工具箱,通過(guò)工具箱的程序得到最終的位姿。 在MATLAB中對(duì)設(shè)計(jì)的機(jī)器人進(jìn)行連桿模型簡(jiǎn)化,對(duì)正運(yùn)動(dòng)學(xué)求解過(guò)程進(jìn)行編程,仿真結(jié)果如圖3 所示。

圖3 機(jī)器人在MATLAB 中的模型Fig.3 Robot model in MATLAB
利用函數(shù)fkine 得到的正運(yùn)動(dòng)學(xué)的解與運(yùn)動(dòng)學(xué)方程得到的初始狀態(tài)末端手腕關(guān)節(jié)的位姿一致,證明本文所列運(yùn)動(dòng)學(xué)方程是正確的。
2 標(biāo)準(zhǔn)遺傳算法的逆運(yùn)動(dòng)學(xué)解
遺傳算法求機(jī)器人逆運(yùn)動(dòng)學(xué)問(wèn)題的首要任務(wù)是確定遺傳算法的目標(biāo)函數(shù),以分解的左臂為對(duì)象,若P點(diǎn)是機(jī)械臂末端腕關(guān)節(jié)可達(dá)空間的一點(diǎn),則點(diǎn)P對(duì)應(yīng)的當(dāng)前位姿矩陣Tp為

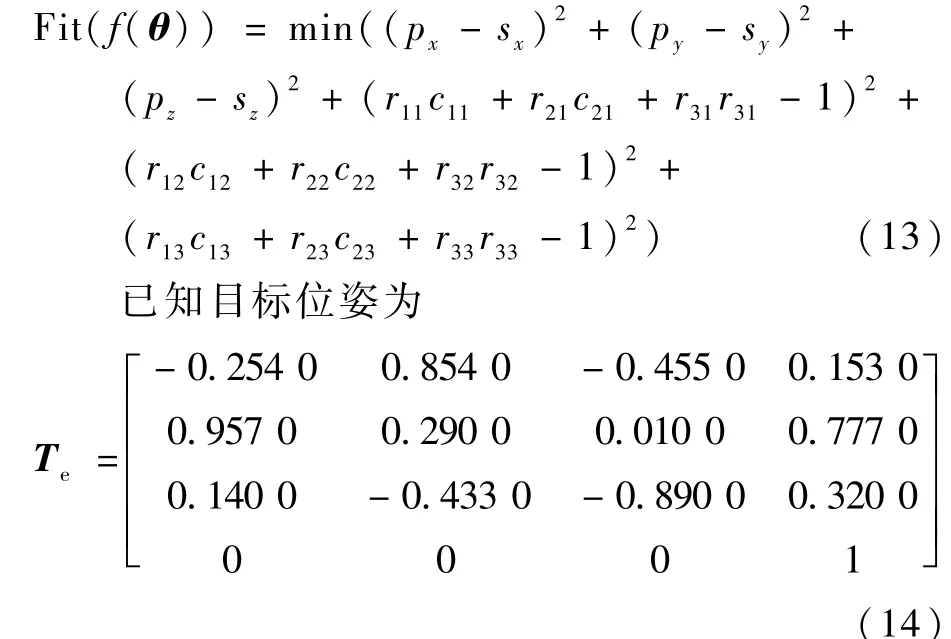
機(jī)器臂末端關(guān)節(jié)在直角坐標(biāo)系中的目標(biāo)位姿矩陣Te為

機(jī)械臂通常根據(jù)機(jī)器人末端目標(biāo)位姿和當(dāng)前位姿的差值作為整體優(yōu)化條件來(lái)計(jì)算適應(yīng)度的大小。 式(9)和式(10)為齊次變換矩陣,左上角3 ×3矩陣是機(jī)械手臂末端的姿態(tài)矩陣,此矩陣是一個(gè)單位矩陣,右上角3 ×1 列向量為機(jī)械手臂末端腕關(guān)節(jié)的坐標(biāo)系原點(diǎn)位置向量。 根據(jù)機(jī)器人位姿矩陣的表示方法,目標(biāo)位姿矩陣和當(dāng)前位姿矩陣的差值可寫(xiě)成

式中:ΔP為位置向量差值;ΔO為姿態(tài)矩陣差值;關(guān)節(jié)變量θ(θ1,θ2,…,θ7)為遺傳算法的種群個(gè)體,則目標(biāo)函數(shù)為

式中:p和s分別為目標(biāo)位姿矩陣和當(dāng)前位姿矩陣的位置列向量;r和c分別為目標(biāo)位姿矩陣和當(dāng)前位姿矩陣的姿態(tài)矩陣;ω為條件系數(shù),當(dāng)末端無(wú)方向要求時(shí),ω=0,當(dāng)末端有方向要求時(shí),ω=1,由于護(hù)理機(jī)器人工作時(shí)需要調(diào)整末端姿態(tài),取ω=1。 對(duì)于護(hù)理機(jī)器人逆運(yùn)動(dòng)學(xué)的遺傳算法,適應(yīng)度函數(shù)為
利用標(biāo)準(zhǔn)遺傳算法進(jìn)行最小值優(yōu)化,設(shè)置遺傳算法參數(shù)后在計(jì)算機(jī)中進(jìn)行仿真實(shí)驗(yàn)。
經(jīng)過(guò)50 次迭代后,種群中個(gè)體的目標(biāo)函數(shù)值分布如圖4 所示。 可以看出,初始種群個(gè)體的目標(biāo)函數(shù)值分布比較集中,容易產(chǎn)生局部最優(yōu)。

圖4 種群中個(gè)體的目標(biāo)函數(shù)值分布Fig.4 Distribution of objective function values of individuals in population
種群適應(yīng)度函數(shù)均值和最優(yōu)解隨遺傳代數(shù)的變化如圖5 所示。 可以看出,遺傳算法的適應(yīng)度函數(shù)和有效逆解基本收斂,但最終收斂值不是理想的0,而是從第10 次迭代后就過(guò)早停止了向全局最優(yōu)解進(jìn)化,停滯在0.532 2 左右。

圖5 種群適應(yīng)度函數(shù)均值和最優(yōu)解的變化Fig.5 Variation of the mean value of population fitness function and optimal solution
關(guān)節(jié)空間遺傳算法優(yōu)化解位姿如圖6 所示。可以看出,標(biāo)準(zhǔn)遺傳算法所得到的最優(yōu)逆解和目標(biāo)位姿存在誤差,誤差對(duì)應(yīng)到有效逆解結(jié)果的位姿圖示上可以看出,機(jī)器人手臂末端點(diǎn)沒(méi)有達(dá)到目標(biāo)位姿的目標(biāo)點(diǎn)。
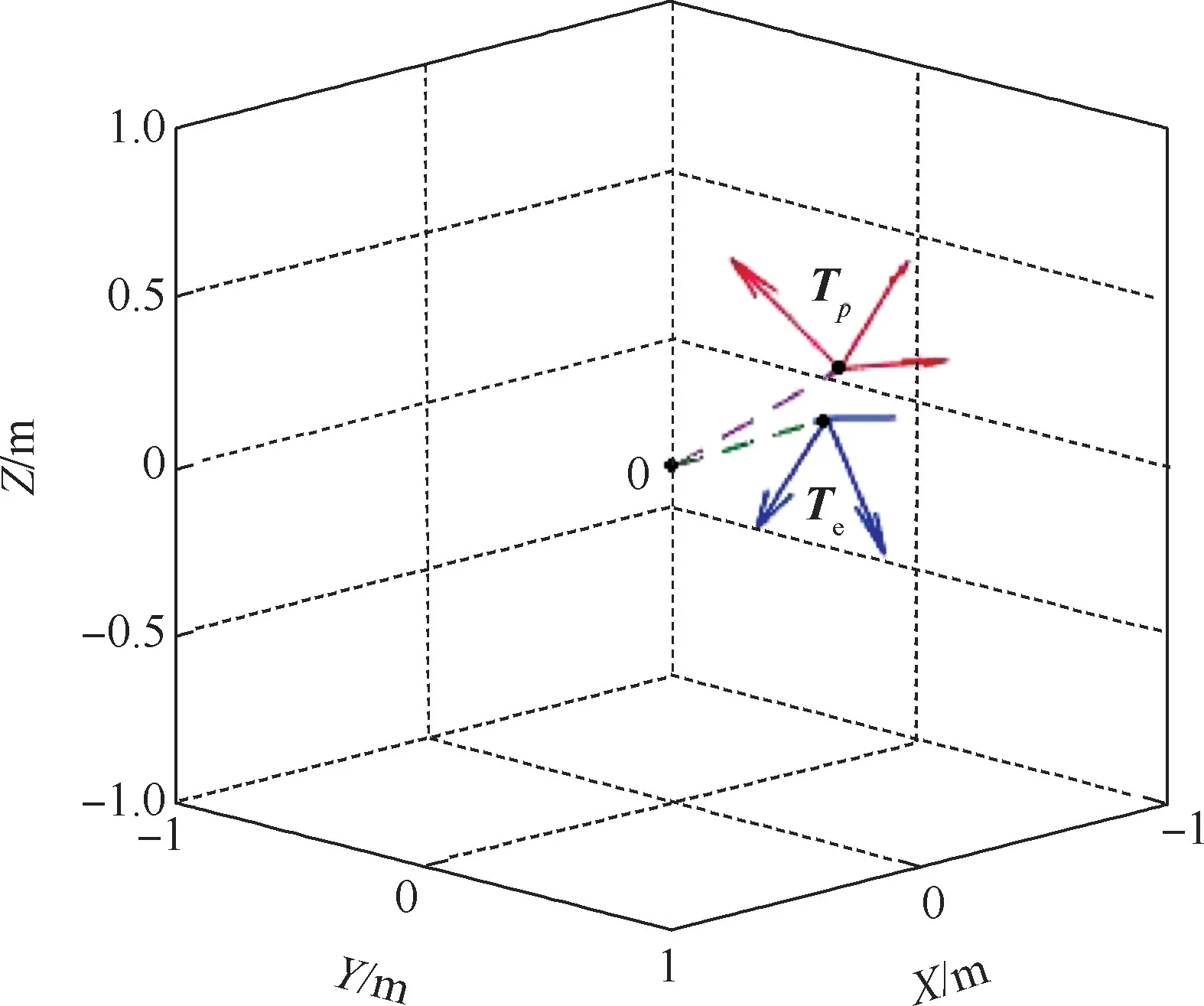
圖6 關(guān)節(jié)空間遺傳算法優(yōu)化解位姿Fig.6 Genetic algorithm optimization of pose in joint space
護(hù)理機(jī)器人手臂關(guān)節(jié)較多,設(shè)定的基本種群規(guī)模相對(duì)較小,而且適應(yīng)度函數(shù)值較大使得有效逆解不易被選取。 此外,適應(yīng)度函數(shù)以位姿偏差為核心,機(jī)器人運(yùn)動(dòng)到不同狀態(tài)時(shí)所處位置的位置偏差和姿態(tài)偏差變化方向不一致,個(gè)體很容易被淘汰,因此需要進(jìn)一步優(yōu)化。
3 標(biāo)準(zhǔn)遺傳算法的改進(jìn)算法
針對(duì)標(biāo)準(zhǔn)遺傳算法的不足,從增加群體多樣性和適應(yīng)度函數(shù)標(biāo)定2 個(gè)方面對(duì)標(biāo)準(zhǔn)遺傳學(xué)算法進(jìn)行適當(dāng)改進(jìn),解決原始算法收斂速度慢和收斂精度低等問(wèn)題,提高護(hù)理機(jī)器人逆運(yùn)動(dòng)學(xué)解的精度。
3.1 初始種群的產(chǎn)生
護(hù)理機(jī)器人關(guān)節(jié)轉(zhuǎn)角范圍相差大,且極其不均勻。 因此,在增加種群的基礎(chǔ)上采用等分區(qū)間的方法來(lái)產(chǎn)生初始種群,即將各個(gè)關(guān)節(jié)的轉(zhuǎn)角范圍等分成相等的5 個(gè)小區(qū)間,再在每個(gè)小區(qū)間隨機(jī)生成20 個(gè)個(gè)體,最后5 個(gè)小區(qū)間的所有個(gè)體一起來(lái)組成初始種群。
每個(gè)關(guān)節(jié)的運(yùn)動(dòng)范圍的表達(dá)式為

式中:θi為關(guān)節(jié)變量;θij為第i個(gè)關(guān)節(jié)的第j個(gè)等分區(qū)間。
關(guān)節(jié)運(yùn)動(dòng)范圍等分區(qū)間如圖7 所示,θ3的轉(zhuǎn)角范圍為π/4,θ5的轉(zhuǎn)角范圍為π。

圖7 關(guān)節(jié)運(yùn)動(dòng)范圍等分區(qū)間Fig.7 Joint range of motion equipartition interval
以θ3和θ5采用等分區(qū)間的方法前后產(chǎn)生初始種群的個(gè)體分布,如圖8 所示。 可以看出,采用等分區(qū)間的方法所產(chǎn)生的個(gè)體分散程度比整體隨機(jī)種群個(gè)體的分散程度高。
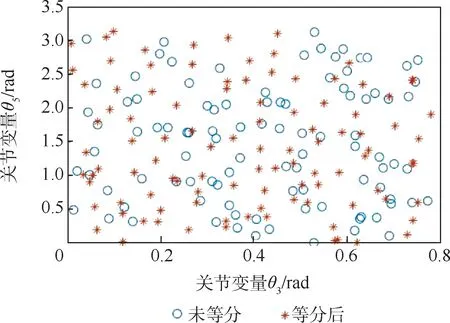
圖8 等分區(qū)間前后個(gè)體的分布Fig.8 Distribution of individuals before and after equipartition interval
因此,采用等分區(qū)間后不僅增大初始種群包含最優(yōu)解組合概率,而且避免了個(gè)體的不均勻分布,提高了搜索效率。
以等分區(qū)間方法產(chǎn)生的初始種群進(jìn)行遺傳算法求解最優(yōu)解,其他參數(shù)設(shè)置基于標(biāo)準(zhǔn)遺傳算法,運(yùn)行算法得到適應(yīng)度函數(shù)均值和最小值隨代數(shù)的變化,如圖9 所示。 可以看出,最優(yōu)解在30 代是基本收斂到最小值,雖然沒(méi)有得到較小的解,但延長(zhǎng)了進(jìn)化代數(shù),推遲了早熟進(jìn)程,提高了算法的可靠性。

圖9 等分區(qū)間種群適應(yīng)度函數(shù)均值和最優(yōu)解的變化Fig.9 Variation of the mean value of population fitness function and optimal solution in equipartition interval
3.2 適應(yīng)度函數(shù)的選擇
隨機(jī)產(chǎn)生的種群適應(yīng)度值較大的個(gè)體統(tǒng)治著整個(gè)初始種群,進(jìn)化到最優(yōu)個(gè)體之前停止進(jìn)化,以至于無(wú)法產(chǎn)生全局最優(yōu)解。 進(jìn)化過(guò)程中個(gè)體適應(yīng)度的值基本不變,造成了獲得的最優(yōu)解不是全局最優(yōu)解。 為了解決該問(wèn)題,通過(guò)反復(fù)地對(duì)比與運(yùn)算,在適應(yīng)度函數(shù)中加入了可變權(quán)因子β,隨迭代次數(shù)基于位姿誤差的最小可變權(quán)因子,改進(jìn)后適應(yīng)度函數(shù)的計(jì)算式如下:

在進(jìn)化開(kāi)始時(shí)位置誤差和姿態(tài)誤差應(yīng)分配相同的權(quán)重,初期位置誤差較大,而姿態(tài)誤差變化一直較小,因此可變權(quán)因子β表達(dá)式為式(17)。 在迭代進(jìn)化過(guò)程中,β隨著ΔP的改變而改變,ΔP的值在算法開(kāi)始時(shí)一般比較大,此時(shí)β值接近于0.5;隨著進(jìn)化過(guò)程的繼續(xù)進(jìn)行,到了一定的代數(shù)以后,ΔP值逐漸變小,而β接近于1。 加入可變權(quán)因子β后的適應(yīng)度函數(shù),可以為位置誤差和姿態(tài)誤差在進(jìn)化過(guò)程中分配合適的權(quán)重,確保了進(jìn)化過(guò)程向全局最優(yōu)解的方向進(jìn)行收斂。
3.3 改進(jìn)算法的仿真分析
在標(biāo)準(zhǔn)遺傳算法運(yùn)動(dòng)學(xué)逆解程序的基礎(chǔ)上,按等分區(qū)間劃分產(chǎn)生種群,并且使用加入變權(quán)因子的適應(yīng)度函數(shù),進(jìn)行仿真分析。 經(jīng)過(guò)50 次迭代后,種群中個(gè)體的目標(biāo)函數(shù)數(shù)值分布如圖10 所示。 可以看出,個(gè)體的目標(biāo)函數(shù)值分散程度高,保證了種群的多樣性。

圖10 改進(jìn)算法種群中個(gè)體的目標(biāo)函數(shù)值分布Fig.10 Distribution of objective function values of individuals in population of improved algorithm
種群適應(yīng)度函數(shù)均值和最優(yōu)解隨遺傳代數(shù)的變化如圖11 所示。 通過(guò)算法改進(jìn)前后的變化對(duì)比可以看出(見(jiàn)圖5 和圖11),在經(jīng)過(guò)10 次迭代后,改進(jìn)算法開(kāi)始快速收斂于全局最優(yōu)解,且適應(yīng)度函數(shù)均值和最優(yōu)解的函數(shù)值趨近于0,收斂精度高,可以得到精確的最優(yōu)解。

圖11 適應(yīng)度函數(shù)均值和最優(yōu)解隨遺傳代數(shù)的變化Fig.11 Variation of the mean value of fitness function and optimal solution with number of genetic generations
關(guān)節(jié)空間遺傳算法優(yōu)化解位姿如圖12 所示。對(duì)比圖6 可以看出,目標(biāo)位姿和當(dāng)前位姿基本重合,誤差很小。

圖12 關(guān)節(jié)空間改進(jìn)算法優(yōu)化解位姿Fig.12 Optimization of pose in joint space using improved algorithm
改進(jìn)遺傳算法可以有效解決機(jī)器人運(yùn)動(dòng)學(xué)逆解,為護(hù)理機(jī)器人手臂的運(yùn)動(dòng)學(xué)逆解算法提供了一種新的思路,也可為實(shí)現(xiàn)機(jī)器人智能運(yùn)動(dòng)規(guī)劃提供參考。
4 實(shí)驗(yàn)驗(yàn)證
在實(shí)驗(yàn)室環(huán)境中,搭建三坐標(biāo)測(cè)量系統(tǒng)對(duì)護(hù)理機(jī)器人末端姿態(tài)進(jìn)行測(cè)試。 通過(guò)攝影測(cè)量實(shí)現(xiàn)姿態(tài)的精準(zhǔn)測(cè)量。 圖13 為測(cè)試系統(tǒng)實(shí)物圖,包含數(shù)碼相機(jī)、測(cè)量光筆、工控機(jī)及軟件系統(tǒng)。

圖13 三坐標(biāo)測(cè)量系統(tǒng)Fig.13 Three coordinate measuring system
通過(guò)測(cè)量光筆的位姿來(lái)間接測(cè)量護(hù)理機(jī)器人手臂的末端姿態(tài)位置,光筆的測(cè)量精度決定了測(cè)量準(zhǔn)確性。 采用CLP 6800 的光筆,其測(cè)量精度為±0. 03 mm,工作溫度0 ~45℃,可以滿足系統(tǒng)需求。 圖14 為測(cè)試實(shí)驗(yàn)圖,操作人員手持光筆,在數(shù)碼相機(jī)的有效拍攝范圍內(nèi),對(duì)目標(biāo)點(diǎn)進(jìn)行測(cè)量,光筆外側(cè)的LED 要指向數(shù)碼相機(jī)。

圖14 測(cè)量實(shí)驗(yàn)Fig.14 Measurement tests
以護(hù)理機(jī)器人水平抱舉姿態(tài)為目標(biāo)位姿點(diǎn),對(duì)應(yīng)的左臂末端位姿矩陣為

基于改進(jìn)遺傳算法求得的最優(yōu)解InvsolL 為[0.444 6 -0.087 7 0.674 2 1.573 3 1.860 3-0.305 1 -0.162 9]。 護(hù)理機(jī)器人根據(jù)運(yùn)動(dòng)學(xué)逆解到目標(biāo)位置后,對(duì)目標(biāo)點(diǎn)進(jìn)行測(cè)量。 測(cè)量得到的左臂末端的位姿為

對(duì)比分析其位姿誤差ΔE,其中位置誤差ΔP為末端執(zhí)行器坐標(biāo)系原點(diǎn)的位置向量與目標(biāo)點(diǎn)位置向量差的模的平方:

姿態(tài)誤差ΔA為護(hù)理機(jī)器人末端執(zhí)行器坐標(biāo)系各個(gè)坐標(biāo)軸向量與對(duì)應(yīng)目標(biāo)點(diǎn)坐標(biāo)軸向量差的模減1 的平方:
計(jì)算可得到左臂末端位置的位姿誤差ΔEl為0.886 ×10-3m。 實(shí)驗(yàn)中右臂和左臂的運(yùn)動(dòng)一致,因此主要對(duì)左臂進(jìn)行分析和實(shí)驗(yàn)。
從計(jì)算結(jié)果可以看出理論目標(biāo)位置和測(cè)量目標(biāo)位置之間存在一定的誤差,但對(duì)于主要抱取病人的護(hù)理機(jī)器人來(lái)說(shuō),誤差在允許的范圍內(nèi)。
5 結(jié) 論
1) 本文采用等分區(qū)間法產(chǎn)生的初始群體不僅增大了包含最優(yōu)解組合的概率,而且避免了個(gè)體的不均勻分布,提高了搜索效率。
2) 在適應(yīng)度函數(shù)中加入基于位姿誤差的最小可變權(quán)因子,確保了進(jìn)化過(guò)程向全局最優(yōu)解的方向進(jìn)行收斂。
3) 通過(guò)搭建實(shí)驗(yàn)測(cè)試系統(tǒng),結(jié)果表明改進(jìn)后的遺傳算法求得的逆向運(yùn)動(dòng)學(xué)解為最優(yōu)全局解,護(hù)理機(jī)器人的位姿誤差較小。
猜你喜歡
安徽醫(yī)學(xué)(2022年10期)2022-11-12 02:42:20
醫(yī)學(xué)食療與健康(2021年27期)2021-05-13 18:46:23
醫(yī)學(xué)概論(2021年18期)2021-01-21 22:46:45
中華養(yǎng)生保健(2020年7期)2020-11-16 01:14:02
中華養(yǎng)生保健(2020年3期)2020-11-16 00:52:46
中華養(yǎng)生保健(2020年2期)2020-11-16 00:49:54
家庭醫(yī)學(xué)(下半月)(2019年9期)2019-10-12 08:04:18
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年20期)2019-01-19 02:56:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:32
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年20期)2014-03-01 04:31:38
