精沖零件實時分揀技術研究
2022-11-08 09:05:42張昊武中國機械總院集團機電研究所有限公司
鍛造與沖壓 2022年20期
關鍵詞:檢測
文/張昊武·中國機械總院集團機電研究所有限公司
彭群,杜貴江,李峰·北京機電研究所有限公司揚州分公司
為解決生產線上精沖件正反面實時分揀的問題,提出了一種基于像素點分割的判別算法,從提取的ROI 中心對圖像進行n(n>3)等分,計算每份中非零像素點數量,并由此組成一個特征向量,然后通過計算待檢測圖像和模板兩者的特征向量的歐氏距離,根據其結果設定閾值用來判別正反面。基于此算法設計開發了一套檢測系統,整體平均運行速度達到2.68ms/件,準確率達到99.99%。
問題提出的背景
精沖零件的幾何形狀、尺寸和形位公差以及剪切面的質量都遠優于普通沖裁的零件,因此精沖工藝在汽車零件制造和航空航天等相關領域發揮著很大作用。利用機器視覺檢測,按照零件的正反面進行分揀,可減少人工,極大地提高生產效率,便于后續的直接裝配、去毛刺和打包裝箱等生產流程。
對于小型零件,模具往往采用多型腔設計,一次沖裁可以成形多個零件(2 ~6 個)。這種短時間內成形多個零件的工作節拍,會導致一個周期內掉落在送檢傳送帶上的零件間隔較小,在傳送帶長度有限的情況下,不能很好的將其間隔變大。在利用機器視覺進行檢測時,間隔較小對于觸發拍照的方式也有影響,即:當第一個零件還沒有走出拍照區域,第二個零件就觸發了拍攝開關,存在拍攝不到完整零件或者將上一個零件拍進照片的可能。
另外實際生產環境中油污、灰塵及零件料渣等可能對傳感器探頭造成一定遮擋,使觸發閾值發生變化;以及未去除的廢料粒觸發了開關,這些都有可能導致拍攝不到完整零件或將上一個零件再次識別,從而無法對零件進行檢測判斷。因此,急需一種快速穩定的檢測技術對零件進行目標識別與正反面判斷,以解決上述問題。
目標識別
為了解決觸發拍照帶來的問題,本文使用視頻模式連續拍攝,對目標的完整性提出了以下判斷方法。其可以對出現在視野里的零件依次追蹤編號,由此可以將檢測結果與每個零件一一對應上,通過相關信息的判斷語句,在每個零件完全進入相機視野時,對其進行判斷。新零件出現在視野中時賦予其新編號,退出視野時取消其編號。其中關鍵在于,如何判斷目標完全進入視野和退出視野、檢測以及目標跟蹤。
首先用最小外接矩形框住進入視野的目標,然后設置兩個條件語句。條件一,矩形短邊的長度超過一個閾值;條件二,矩形中心點跨過“絆線”(圖1 中綠色豎線)。若條件一,二均為真,則認為該目標完全進入視野,沒有處于視野之外的部分,并且提取矩形框中的圖形作為ROI,流程圖如圖2 所示。目標進入視野時的情況如圖1 所示,時刻1 中,右側零件滿足條件一、二,矩形框為綠色表示已標記,標記為01 號零件;左側零件不滿足條件一、二,矩形框為藍色表示未標記,不進行標記編號。時刻2 中,左側零件越過絆線,滿足條件一、二,矩形框變為綠色,標記為02 號零件。

圖1 目標進入視野的情況

圖2 判斷是否進入視野的流程圖
零件的正反判斷
位姿矯正
由于零件掉落到傳送帶上位姿是隨機的,以圖3為例,往往與模板之間存在一定的角度差異,以矩形框最下方一點為原點,過原點的水平線為角的始邊,過原點且位于原點右側的矩形的一邊為終邊,始邊與終邊所夾銳角為角度差異θ。逆時針旋轉θ 角度后,最小外接矩形連同零件的圖像被轉正。轉正后的圖像位姿與4 個模板(圖4 中a-d)其中之一相同。

圖3 待檢測圖像ROI
基于像素點分割的判別算法
將圖4a 的模板,以中心點為原點,按圖5 的方式進行四等分,分別計算各象限的黑色像素點數量。對于復雜的圖形,可以進行大于4 的等分。模板從第一象限到第四象限的黑色像素點數量組成向量a,以a 中最小值為第一個元素,同樣按照逆時針排序,得到向量b,b 作為模板向量。轉正后的待檢測圖像以同樣方法進行分割,從第一象限到第四象限為c,拼接兩個c 得到d。計算c 中最小值的索引為cmin,可以得到新的向量e,e 作為待檢測向量。向量a-e 見式1。

圖4 模板

圖5 分割圖
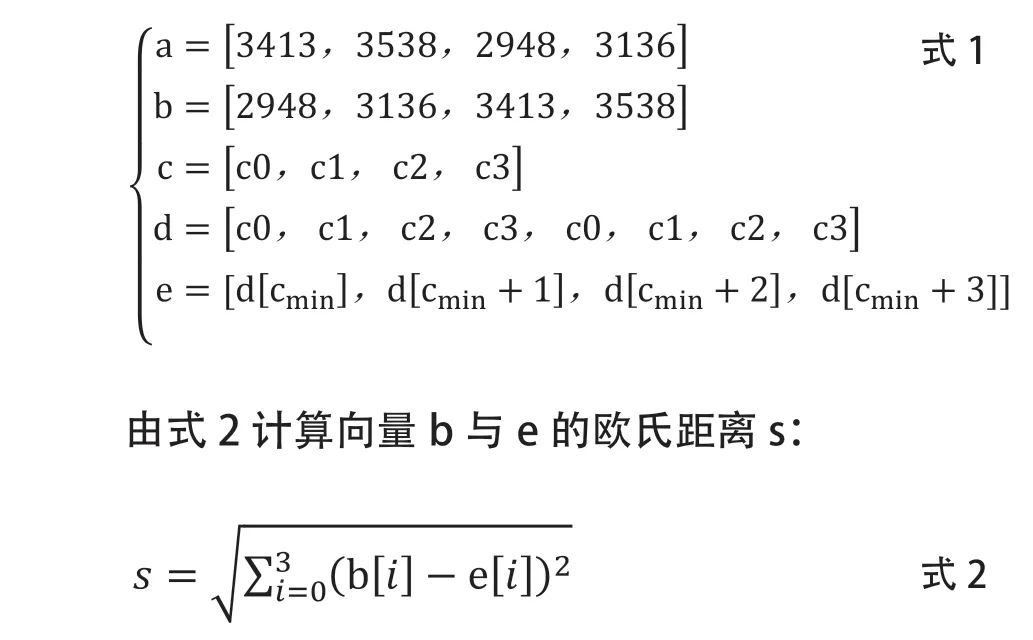
隨機抽取20 個零件檢測,結果如圖6 所示。結果表明,正面零件的歐式距離均大于500,反面零件的歐式距離均小于200。可以設定判別閾值為350,據此來判別圖像的正反面。

圖6 歐氏距離分布圖
算法的實現與比較
根據本文提出的基于像素點分割的判別算法,利用C++編寫代碼,實現目標識別、ROI 提取和正反面判斷功能。被判斷為反面的零件,使用氣缸或機械臂將其放置于另一條傳送帶上,完成正反零件的分揀操作。若有需要可采用翻面機構將反面零件翻正,便于后續的去毛刺、打包裝箱和裝配等生產流程的進行。
連續采集100 件,整體的平均運行速度可達2.68ms/件,其中正反面判別部分的速度可達1.00ms/件,能夠滿足在20 ~60 幀/秒的視頻采集條件下運行。判別速度高于OpenCV中matchTemplate算子的5.00ms/件。本文算法與Hu 不變矩方法的判別速度相當,但其在實時檢測的情況下,誤判率更低,穩定性更好。
結論
本文針對精沖零件,提出了一種用于正反面識別的基于像素點分割的判別算法。由此開發了一套精沖件實時分揀的技術,搭建了零件正反面檢測系統并進行了實驗驗證。研究結果表明:
⑴檢測系統運行流暢,本文算法切實可行;
⑵檢測系統對單個零件的檢測時間為2.68ms;
⑶檢測系統對精沖零件正反面判斷的準確率達到99.99%。
研究成果對類似場景下其他產品正反面判別及實時分揀技術的研發具有借鑒意義。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
