稀疏MIMO 雷達實孔徑三維成像技術
2022-11-06 06:30:42蘭宇田佳豪劉丹陽朱永鋒周劍雄
電波科學學報 2022年4期
蘭宇 田佳豪 劉丹陽 朱永鋒 周劍雄
(國防科技大學電子科學學院,長沙 410073)
引 言
相較合成孔徑雷達(synthetic aperture radar,SAR),實孔徑雷達對前視以及近距離目標有較高的分辨率[1-3]和實時的成像能力,如層析SAR、陣列SAR 等三維SAR 成像需配合一定航跡的觀測數據才能獲得三維信息[4-5],而實孔徑雷達可以快速解出目標三維信息,且具有較高的自由度.
為獲得高角度分辨率,實孔徑雷達需設計較大的天線孔徑,可能會增加系統成本以及后期維護成本.稀疏陣列設計常采用遺傳算法、粒子群算法等等優化算法[6-11],可以在較少陣元數量的前提下獲得較大的陣列孔徑,實現實孔徑雷達低成本、高精度的目標.
多輸入多輸出(multiple-input multiple-output,MIMO)雷達是把通信系統中MIMO 概念與數字陣列雷達相結合的一種新體制雷達[12].MIMO 技術可以利用空間分集、極化分集、頻率分集、波形分集等方式[13]獲得收發聯合的虛擬陣元和等效孔徑,在等效孔徑概念基礎上,MIMO 陣列可以轉換為單程陣列進行設計[14-15].MIMO 與稀疏陣列結合設計優勢在于等效孔徑為稀疏陣列設計提供了更多的設計空間,為更優的陣列性能創造了條件.
針對MIMO 稀疏陣列,本文給出了MIMO 單快拍成像模式(以下簡稱MIMO 模式)和相控陣多幀聯合成像模式(以下簡稱相控陣模式)兩種三維成像方法,推導了兩種模式下的三維成像原理,對比了兩種模式下角度分辨率和信噪比(signal noise ratio,SNR)的異同.分析過程及仿真結果表明 MIMO 模式與相控陣模式的角度分辨率是一致的,相控陣模式的SNR 大于MIMO 模式的SNR.
1 稀疏面陣三維成像原理
1.1 前提條件
本文推導過程滿足:信號相對陣列為窄帶信號,目標位于陣列遠場.
窄帶信號[16]7的帶寬B滿足

式中:v為信號源傳播速度;L為陣列天線最大輪廓尺寸.
信號相對陣列為窄帶信號,則各陣元接收(或到達)某一散射點處的信號時間差小于信號的時間分辨率(約等于1 /B),不影響信號的復包絡[16]15,故各陣元接收(或到達)某一散射點處的距離處于同一個距離單元,與陣元位置無關,此時信號的時域和空域可以分開.
遠場條件[1]4散射點與陣列的距離R滿足

式中,λ為發射信號的波長.
當目標位于陣列的遠場時,各陣元接收(或到達)某一散射點處的信號時間差可以線性表示.
1.2 測距原理(時域)
本文推導及仿真過程采用線性調頻信號:

式中:T為調頻時間;f0為載頻;K為調頻斜率.
發射信號經距離為R處的某個散射點,設信號強度為1,則回波信號表達式為

式中,τ=2R/c.
選擇去斜接收方法對回波信號進行脈沖壓縮,在混頻之后進行采樣能夠有效降低對系統采樣率的要求.
去斜接收具體過程如下:
1) 混頻
因實孔徑雷達成像一般用于近距離目標,故參考距離一般選作0,有

2) 采樣
對混頻之后的信號采樣,設在整個調頻時間T內進行L點采樣,對式(5)做變量替換,得到采樣之后的信號表達式為

3) 對式(6)做LFFT點快速傅里葉變換(fast Fourier transform,FFT),有

1.3 兩種模式下的測角原理(空域)
均勻滿陣是指陣元等間距排列的陣列,稀疏陣可以看成是在均勻滿陣的柵格中選擇部分陣元形成的[17],如圖1 所示. (dx,dy)代表陣列最小間距,(xi,yi,0)代 表第i個陣列坐標,定義矩陣E,其元素為


圖1 稀疏陣列圖Fig.1 The graph of sparse array
1.3.1 MIMO 模式測角原理
假設接收陣元M個,發射陣元N個,(xrm,yrm,0)為第m個接收陣元的坐標,(xtn,ytn,0)為 第n個發射陣元的坐標,設某個散射點在球坐標系中坐標為 (R,θ,φ),在xyz直角坐標系中坐標為 (x0,y0,z0),陣列與目標相對位置關系如圖2 所示.

圖2 二維陣列與目標的相對位置Fig.2 Relative position of the 2D array to the target
第n個發射陣元發射的信號到散射點處的信號sn(t)為

當散射點位于陣列的遠場時,各陣元到散射點之間的時延差滿足線性關系:

式中:v=sin θsinφ;u=cos θsinφ.

在MIMO 模式下發射信號在散射點處不進行相干疊加,第n個發射信號到達第m個接收陣元信號為

式中:nmn(t)為高斯白噪聲.
由式(12)可推出MIMO 虛擬接收陣元位置[16]:

式中:M為接收陣元數量;N為發射陣元數量;MN為等效陣元數量.MIMO 模式可在任意一個快時間維采樣點上(單快拍)獲得MN個虛擬通道,通過空間分集、波形分集等方式使信號在散射點處不進行相干疊加.
由式(12)和(13)可得到MIMO 收發聯合導向矢量:

1) 收發聯合數字接收波束形成
設數字接收波束指向 (vr,ur),在線性加權情況下,MIMO 等效陣列接收波束形成權系數為

MN個等效接收陣列的波束形成使信號幅度、噪聲功率、SNR 均增加了MN倍,故波束形成等效于相干累積過程.


式中:I1=max(x)/dx;I2=max(y)/dy;(dx,dy)為等效接收陣列最小間距.
令矩陣E滿足

結合式(17)得

如果等效接收陣列為均勻滿陣,則E為一個元素全為1 的矩陣,式(19)簡化為

均勻面陣的方向圖近似為兩個sinc 函數的乘積,采用3 dB 波束寬度表征其角度分辨性能:

由式(20)、(21)可以得出:稀疏面陣的波束形成相當于對均勻滿陣做二維加窗FFT,E(i1,i2)是陣元維的二維窗函數,可使稀疏面陣方向圖的主瓣展寬.
采用陣列方向圖一個周期內的波束指向變化范圍表征陣列的無模糊測角范圍[18]:

可以看出,陣元間距 (dx,dy)與無模糊測角范圍成反比,當dx=λ/2,dy=λ/2時,-1 ≤vr≤1,-1 ≤ur≤1,可以獲得全向的探測范圍.
1.3.2 相控陣模式測角原理
N個發射陣源發射信號到達目標散射點處,表達式為

在各陣元線性加權的情況下,設發射波束指向(vt,ut),相控陣發射波束形成權系數為

相控陣模式下,信號在目標散射點處加權疊加,有

式中,Pt(vt,ut)=為發射方向圖函數.在相控陣模式下信號在散射點處相干疊加,這是相控陣模式與MIMO 模式最本質的區別.
信號經散射到達M個接收陣元的信號可表示為

相控陣數字接收波束形成權系數為

用式(27)中的權系數對式(26)進行數字接收波束形成,有

為相控陣方向圖,其為接收方向圖Pr(vr,ur)與發射方向圖Pt(vt,ut)的乘積.
當數字接收波束指向(vr,ur)及其步進等于發射波束指向 (vt,ut)及其步進時,可以對回波信號進行多幀聯合信號處理,對式(29)做等價變換,有

求得峰值點坐標為vrmax=v,urmax=u,峰值為max(P相控陣(v,u))=MN.
1.3.3 相控制模式與MIMO 模式等效陣列的一致性
稀疏陣列的波束形成等價于對均勻面陣的二維加窗波束形成,所以

式中:(drx,dry)為 接收陣最小間距;(dtx,dty)為發射陣最小間距.
對式(31)做變量替換,有

由以上過程可推導出多幀聯合處理的等效陣列:

與式(13)對比可以看出,相控陣多幀成像的等效陣列與MIMO 模式下是一致的.
等效接收陣列最小間距為發射陣列最小間距和接收陣列最小間距的最大公約數,所以dx≤min(dtx,drx)及dy≤min(dty,dry),虛擬接收陣列相比實際接收陣列更有可能獲得更大的無模糊測角范圍.
1.3.4 相控陣模式與MIMO 模式SNR 分析
MIMO 模式下,信號幅度的相干增益來自于MN個等效接收陣列的數字接收波束形成;相控陣模式下,信號幅度的相干增益來自于N個發射陣元的發射波束形成和M個接收陣元的數字接收波束形成.兩種模式下空間波束形成帶來的信號相干增益是一致的.發射陣列稀疏可能導致發射方向圖產生異變(比如柵瓣),接收陣元稀疏也可能導致接收方向圖產生異變,但經過多幀聯合成像,相控陣合成的方向圖是接收方向圖和發射方向圖的乘積,等效于MIMO模式的方向圖,改善了稀疏陣列的方向圖形態.
MIMO 模式和相控陣模式各接收機接收到的信號可以看作是一個合成信號,M個接收通道之間的噪聲是相互獨立的.MIMO 模式以波形分集為例,N個發射信號正交,各接收通道的匹配濾波器組與N個發射信號一一對應,M個相互獨立的噪聲隨接收信號經過匹配濾波器組后,得到MN個相互獨立的噪聲.對于相控陣模式,各接收通道的匹配濾波器組對應一個相同的發射信號,得到M個相互獨立的噪聲.
雷達系統的噪聲主要來自于外部噪聲(太陽和宇宙的噪聲)以及內部噪聲(熱噪聲、起伏噪聲和閃爍噪聲等),接收機的熱噪聲是最主要的部分[19].在MIMO 模式下,噪聲產生于數字接收波束形成之前,因此噪聲經過了MN個虛擬接收陣元的功率合成.在相控陣模式下噪聲絕大部分都產生于發射波束形成之后,所以噪聲只經過M個實際接收陣元的功率合成.
MIMO 模式與相控陣模式波束形成中SNR 與發射陣元數量N、接收陣元數量M的關系如表1 所示,可以得出相控陣模式與MIMO 模式SNR 的比值為發射陣列數量N.

表1 兩種模式下陣元數量與SNR 關系Tab.1 Relationship between array number and SNR with 2 modes
2 稀疏陣列三維成像仿真
2.1 稀疏陣列設計結果
本文根據MIMO 等效陣列結構進行稀疏陣列設計,采用粒子群算法[7-10],得到稀疏陣列結構及其等效陣列,如圖3 所示.發射和接收陣數量分別為8 和16,等效陣列數量為124,等效陣列最大孔徑為110、113 個柵格,柵格大小(最小陣元間距)約等于半波長,第一副瓣水平為-9 dB 左右.
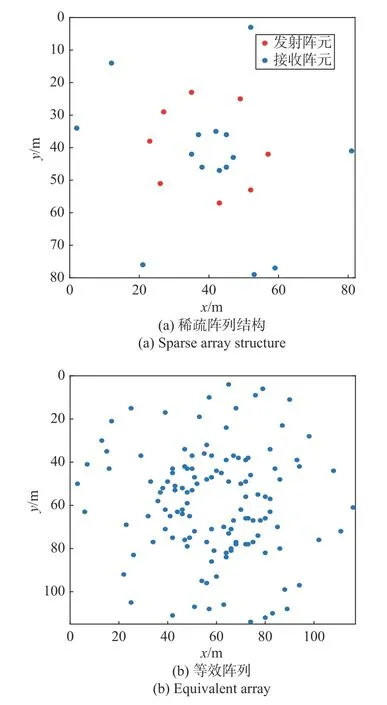
圖3 稀疏陣列結構及其等效陣列Fig.3 The sparse array structure and its equivalent array
2.2 三維成像仿真結果
仿真條件:載頻f0為77 GHz,調頻帶寬B為512 MHz,最大無模糊距離為75 m 左右,目標位置x軸:-21 m~21 m,y軸:0~15 m,z軸:19.5~37.5 m,初始SNR 為10 dB,MIMO 模式及相控陣模式三維仿真結果如圖4 所示.依照圖4(a)中的船只模型仿真得到圖4(b)和(c),可以看出,MIMO 模式和相控陣模式的三維仿真結果類似.


圖4 船只模型及其三維仿真結果Fig.4 The ship model and its 3D MIMO simulation results
3 角度分辨率仿真結果
3.1 角度分辨率分析
根據稀疏陣列設計的結果,指向法線方向(v=0,u=0)的等效虛擬接收陣列方向圖如圖5 所示.


圖5 指向法線方向的等效陣列方向圖Fig.5 The pattern of equivalent array pointing the normal direction
取歸一化方向圖函數值為-3 dB 的坐標點,計算得到主瓣波束寬度為:(v3dB≈0.021,u3dB≈0.023).
等效陣列最大孔徑為 (I1=110,I2=113)個半波長,若是陣元間距為半波長的均勻滿陣,(v=0,u=0)附近的角度分辨率為

與均勻滿陣相比,稀疏陣列角度分辨性能有所下降,驗證了E(i1,i2)可使方向圖主瓣展寬的結論.
3.2 仿真結果
在v-u平面設置2 個點,坐標為 (-0.010 5,0)、(0.010 5,0),仿真結果如圖6(a)和(b)所示;在v-u平面設置2 個點,坐標為 (0,-0.011 5)、(0,0.011 5),仿真結果如圖6(c)和(d)所示.可以看出,相控陣模式與MIMO 模式的角度分辨率是一致的.


圖6 MIMO 模式與相控陣模式角度分辨率Fig.6 The angle resolution of MIMO and phased array modes
4 SNR 仿真結果
仿真條件:載頻f0為77 GHz,調頻帶寬B為256 MHz,最大不模糊測距為75 m 左右,散射點在xyz坐標系中為 (0,0,15),初始SNR 為-5 dB,沿y=0截取,得到xz平面的投影圖,如圖7 所示.可以看出,相控陣模式下的SNR 明顯優于MIMO 模式.
MIMO 模式與相控陣模式SNR 驗證:截取圖7中z=(30 60)范圍內的數據作為噪底求其方差,取最大值作為信號幅度,統計得出SNRMIMO=2.643 6×104和SNR相控陣=3.339 0×104,得到:

圖7 MIMO 模式與相控陣模式SNR 對比Fig.7 The SNR comparison between MIMO and phased array modes

說明相控陣模式與MIMO 模式SNR 的比值等于發射陣元數量.
雖然稀疏陣列在盡量少的陣元數量情況下可獲得較高的角度分辨率,但會導致副瓣水平的提高,從圖5可以看出稀疏陣列的方向圖旁瓣水平較高,約為-9 dB,且保持不變,不會出現均勻滿陣方向圖中旁瓣水平逐漸衰減的特性,因此圖7 中副瓣區域明顯比底噪區域值高.
5 結 論
相控陣多幀聯合成像模式的優點:一是因其發射合成波束的特點,所以具有較高的SNR;二是在信號處理過程中,不需要對各個發射通道分別匹配濾波,數據維度相較MIMO 模式少很多,信號處理過程更簡潔.
MIMO 單快拍模式的優點:一是MIMO 單快拍模式下可以實現實時成像,可以不經過多幀數據積累而獲得較高的角度分辨率;二是波形設計較為靈活,比如作為車載雷達,利用正交波形可以避免不同車載雷達發射信號之間的干擾;三是MIMO 模式不需要波束掃描,進行幾百以至于上千個積累脈沖數的積累而不需要考慮跨波束的問題[13].
因此,MIMO 單快拍模式適合復雜的并且對實時性要求較高的環境,相控陣多幀聯合模式適合對SNR 要求較高且較為簡單的場景.
本文主要討論了目標位于陣列遠場條件下的三維成像方法,下一步將研究目標位于陣列近場條件下的三維成像方法[2].
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
