末端鉸接三平動并聯(lián)機構(gòu)設(shè)計與性能優(yōu)化
2022-11-03 11:13:42暢博彥金國光
農(nóng)業(yè)機械學(xué)報 2022年10期
梁 棟 劉 軍 暢博彥 金國光
(1.天津工業(yè)大學(xué)機械工程學(xué)院, 天津 300387; 2.天津工業(yè)大學(xué)天津市現(xiàn)代機電裝備技術(shù)重點實驗室, 天津 300387)
0 引言
3D打印因高效、環(huán)保、材料利用率高,目前已應(yīng)用于汽車、航空、醫(yī)療、智慧農(nóng)業(yè)等領(lǐng)域[1-2]。為提高打印速度及效率,改善精度,需大力發(fā)展打印技術(shù)和打印方式,而設(shè)計一種新型運動執(zhí)行機構(gòu)并將其應(yīng)用于3D打印領(lǐng)域已然成為一種趨勢。3D打印機運動執(zhí)行機構(gòu)主要分為串聯(lián)與并聯(lián)兩種拓撲構(gòu)型。串聯(lián)機構(gòu)由于其承載能力低、剛度小、關(guān)節(jié)誤差累積等因素,應(yīng)用于3D打印領(lǐng)域時,難以保證高打印質(zhì)量。相比之下,并聯(lián)機構(gòu)具有剛度大、承載力高、響應(yīng)速度快、輸出精度高等優(yōu)點[3],能夠很好地適應(yīng)3D打印要求,因此開發(fā)基于并聯(lián)機構(gòu)的3D打印設(shè)備是未來3D打印發(fā)展的趨勢之一。
一般而言,3D打印機最少需實現(xiàn)空間三平動自由度。作為三平動自由度高速并聯(lián)機器人,Delta機器人是目前商業(yè)應(yīng)用最成功的并聯(lián)機器人之一。研究者運用Delta并聯(lián)機構(gòu)制作3D打印機器人,其價格相對便宜,體積小,適合家庭辦公[4]。SONG等[5]將并聯(lián)機構(gòu)應(yīng)用于3D打印,使末端執(zhí)行器以傾斜角度運動,可實現(xiàn)多向打印。常定勇等[6]設(shè)計的雙輸出3D打印解耦并聯(lián)機器人,其動平臺有較大轉(zhuǎn)動角度,能同時打印兩種相同物體。
除Delta機器人外,一些學(xué)者亦對其他三平動并聯(lián)機構(gòu)開展了廣泛研究。TSAI等[7]提出一種由移動副驅(qū)動,支鏈含4R平行四邊形機構(gòu)的三自由度移動機構(gòu);沈惠平等[8-9]基于方位特征(POC)方程設(shè)計出具有較大工作空間的三平移并聯(lián)機構(gòu),并對其位置正逆解、奇異性等進行了分析;李仕華等[10]設(shè)計出3-UPU型三平移機構(gòu),并對其運動學(xué)性能進行了分析。然而,目前此類并聯(lián)機構(gòu)中多數(shù)機構(gòu)的運動副類型較多,結(jié)構(gòu)較復(fù)雜,制造成本相對較高。
空間并聯(lián)機構(gòu)性能是影響其工程應(yīng)用的重要因素,而對其進行運動學(xué)尺度綜合是保證較好運動性能的重要手段[11]。宋軼民等[12]基于瞬時旋量理論對空間兩轉(zhuǎn)動并聯(lián)機構(gòu)構(gòu)造了功率傳遞系數(shù)指標以評價機構(gòu)的運動傳遞性能,并開展了尺度參數(shù)綜合。張良安等[13]以機構(gòu)雅可比矩陣的全域均值條件數(shù)和全域波動量構(gòu)建全域綜合性能評價指標進行優(yōu)化。國內(nèi)外眾多學(xué)者為研究并聯(lián)機構(gòu)性能,提出很多相應(yīng)的性能指標,并建立目標優(yōu)化模型對其尺度參數(shù)進行優(yōu)化,其中以單目標優(yōu)化居多,而多目標優(yōu)化相對較少。
鑒于上述研究現(xiàn)狀及存在的問題,本文提出一種結(jié)構(gòu)簡潔且易于制造的末端鉸接三平動并聯(lián)機構(gòu),對其構(gòu)型設(shè)計、位置正/逆解、速度/加速度、工作空間、奇異性、綜合性能評價及多目標優(yōu)化等進行系統(tǒng)研究,為該機器人機構(gòu)在3D打印領(lǐng)域及其他領(lǐng)域的拓展應(yīng)用提供理論/技術(shù)基礎(chǔ)。
1 構(gòu)型設(shè)計
1.1 初始構(gòu)型
參照文獻[3,14-15],圖1給出了本文拓撲演化設(shè)計的初始構(gòu)型。該機構(gòu)由3條完全相同的單開鏈支路以及動、靜平臺組成,上方為靜平臺,下方為動平臺,每條支鏈包含5個轉(zhuǎn)動副,其中靜、動平臺的轉(zhuǎn)動副軸線分別與靜、動平臺相垂直,支鏈中另外3個轉(zhuǎn)動副的軸線相互平行且均平行于靜平臺。為保證支鏈運動的對稱性,靜、動平臺上的豎直轉(zhuǎn)動副中心點分別張成兩個等邊三角形。
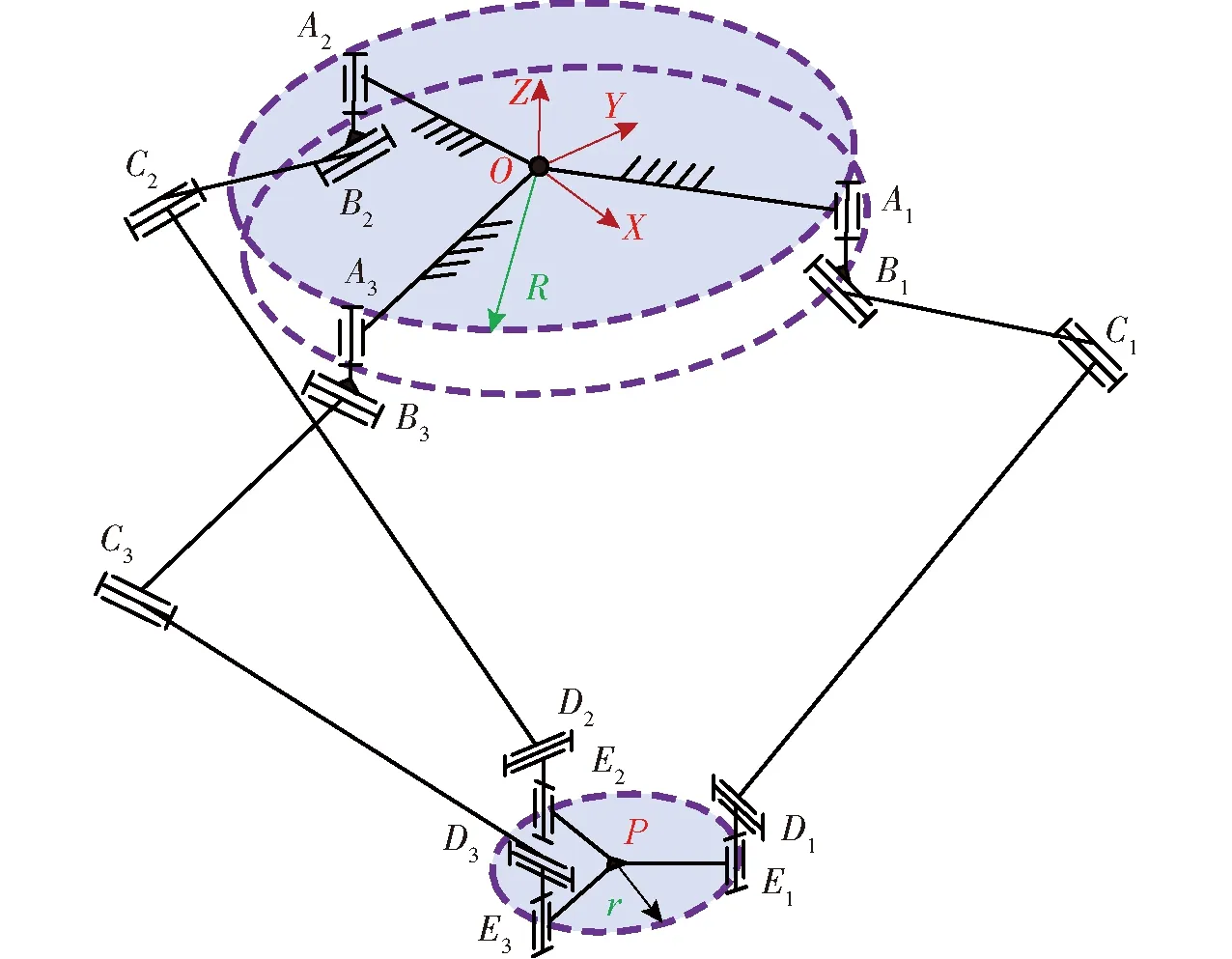
圖1 初始構(gòu)型機構(gòu)簡圖Fig.1 Schematic of initial configuration
采用螺旋理論解析該機構(gòu)的自由度[16]。不失一般性,分支AiBiCiDiEi(i=1,2,3)如圖2所示。
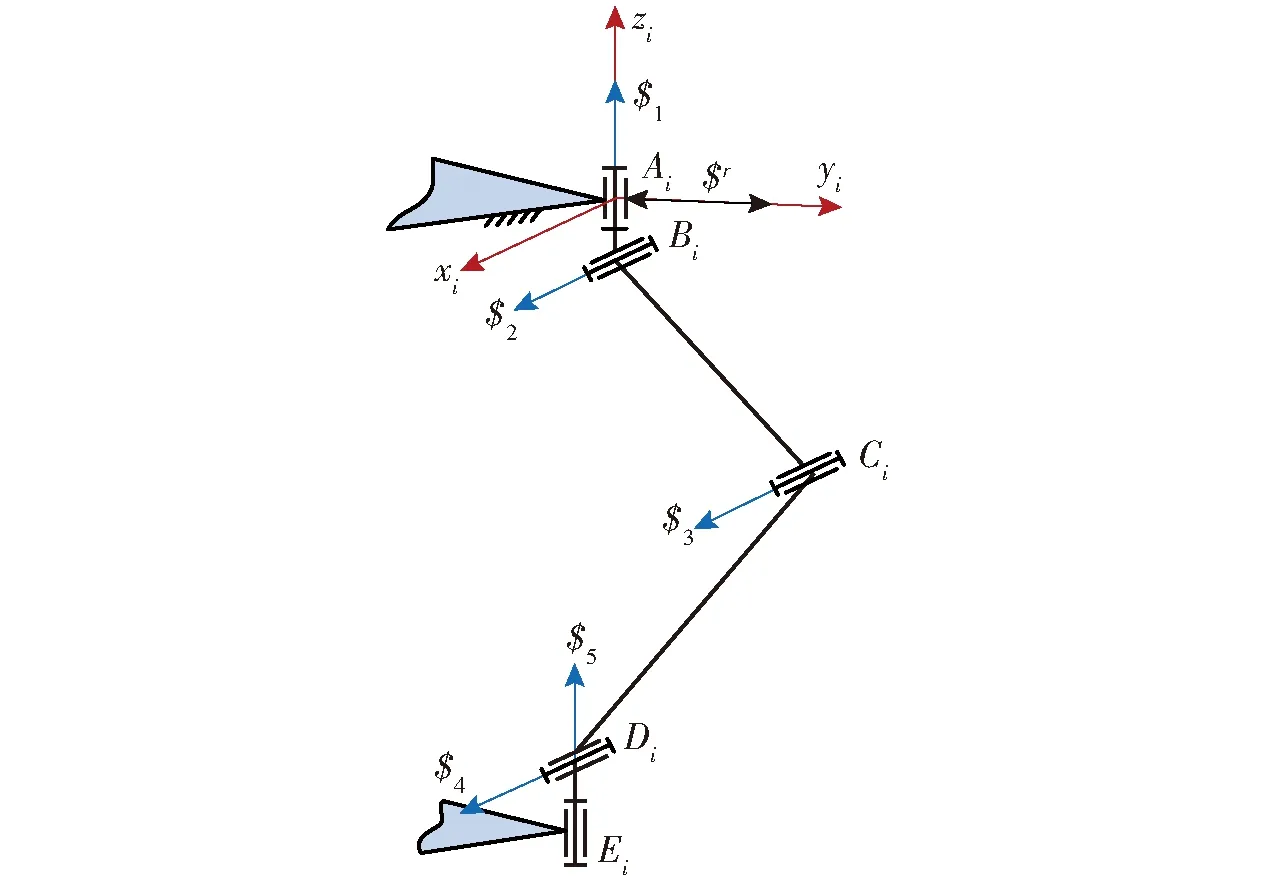
圖2 單分支螺旋運動分析Fig.2 Twist analysis of single branch
其分支坐標系A(chǔ)ixiyizi如圖2所示。在此坐標系下分支中5個運動副運動螺旋表示為
(1)
$r°$i=0 (i=1,2,…,5)
(2)
求得反螺旋為
$r=(0 0 0; 0 1 0)
(3)
由此可知,3條相同的分支將會產(chǎn)生3個約束力偶且共同作用到動平臺上。若設(shè)立一個統(tǒng)一的坐標系OXYZ位于靜平臺中央(圖1),則動平臺所承受來自3個分支的3個約束螺旋可統(tǒng)一表述為
(4)
(5)
(6)
其中
d=6-λ
式中M——機構(gòu)整體自由度d——機構(gòu)階數(shù)
λ——機構(gòu)公共約束數(shù)
n——機構(gòu)構(gòu)件數(shù)之和
g——機構(gòu)運動副個數(shù)
fi——運動副i具有的自由度
v——機構(gòu)中除去公共約束后的冗余約束數(shù)
考慮λ=0和v=1,有
M=6(14-15-1)+15+1=4
(7)
因此初始構(gòu)型有4個自由度,為三平一轉(zhuǎn)(3T1R)機構(gòu)。
1.2 動平臺拓撲演化
初始構(gòu)型的動平臺上有3個繞中心點P周向布置的萬向鉸接結(jié)構(gòu),如圖3a所示。然后,借鑒文獻[17-18]中拓撲優(yōu)化思想,在此將初始構(gòu)型動平臺上的3個轉(zhuǎn)動副軸心沿徑向方向往中心處不斷平移靠攏,如圖3b所示。重復(fù)此步驟,使動平臺上的轉(zhuǎn)動副軸線到動平臺中心的距離無限縮小,最終使3個轉(zhuǎn)動副的軸線重合,如圖3c所示。為保證3條支鏈的運動具有完全對稱性,使末端3個鉸接桿處于同一平面,為此采用兩種不同樣式鉸接桿,如圖3d所示。
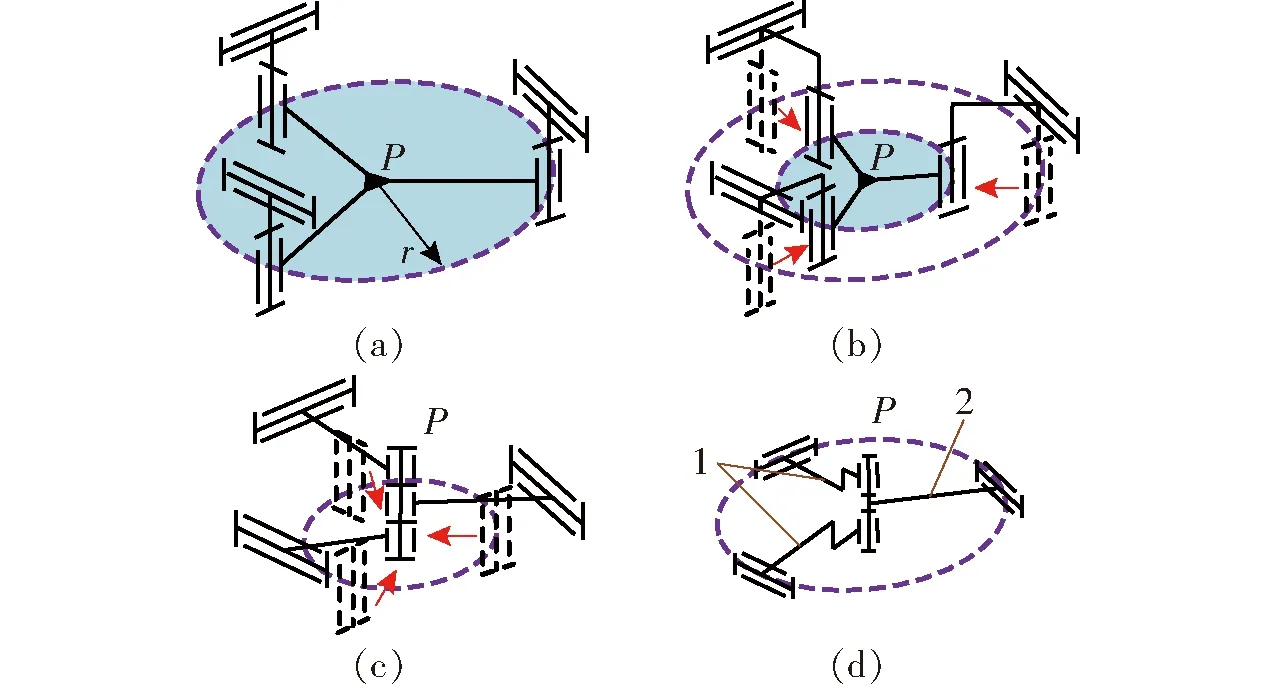
圖3 動平臺演化示意圖Fig.3 Evolution schematic of mobile platform1.彎折桿 2.直桿
1.3 目標構(gòu)型
經(jīng)拓撲演化后,3個末端鉸接桿鉸接于點P,形成復(fù)合鉸鏈,得到目標構(gòu)型如圖4所示。由于動平臺演化成了一鉸接點,其失去了繞Z軸的轉(zhuǎn)動自由度,此時,該機構(gòu)末端鉸接點具有3個自由度,分別是沿X、Y、Z3個坐標軸的平動。特別需指出,本文中拓撲演化方法與文獻[17-18]中的拓撲降耦優(yōu)化方法存在一定區(qū)別,本文機構(gòu)通過拓撲演化設(shè)計后,其自由度發(fā)生了變化,且未改變機構(gòu)運動及結(jié)構(gòu)的對稱性。
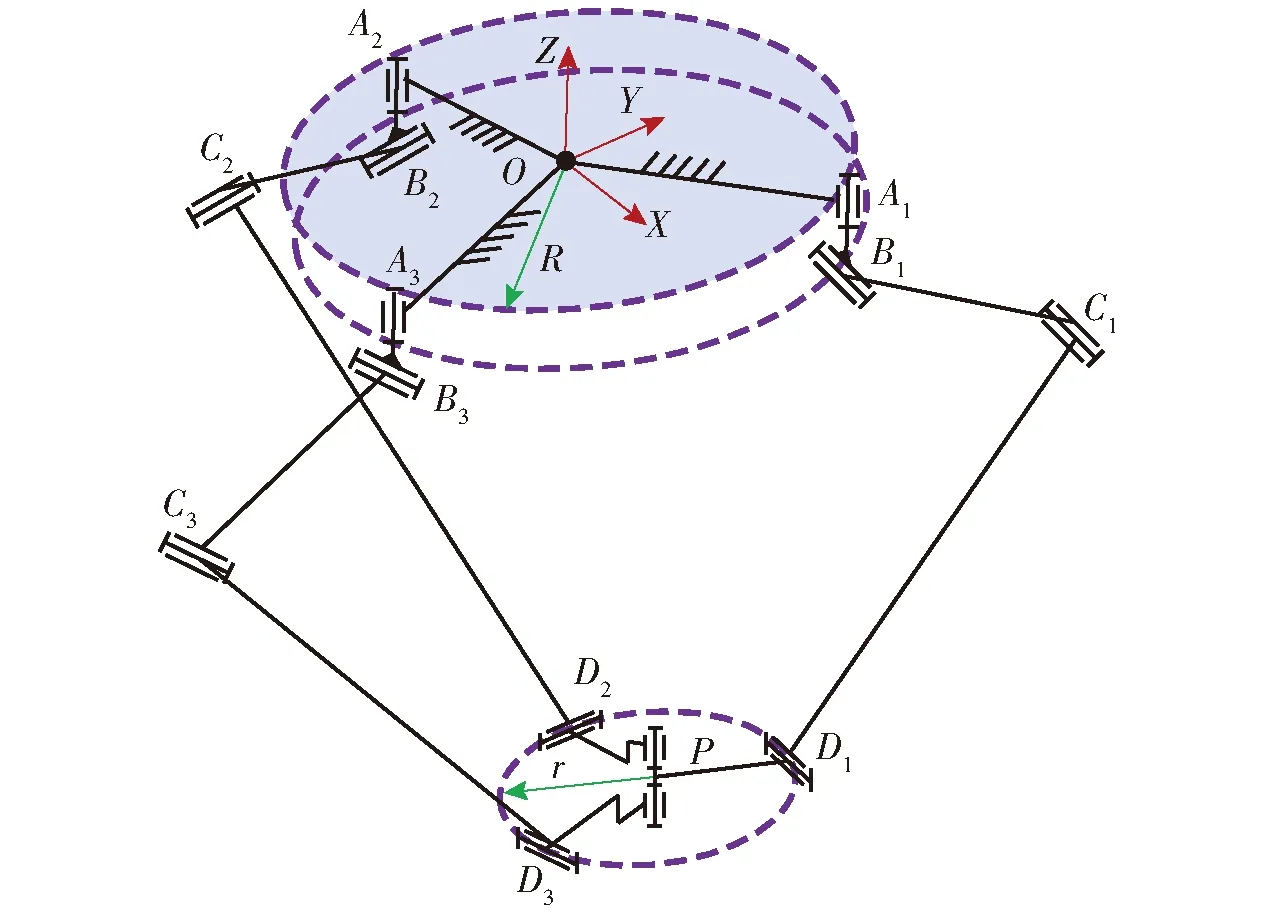
圖4 目標構(gòu)型機構(gòu)簡圖Fig.4 Schematic of target configuration
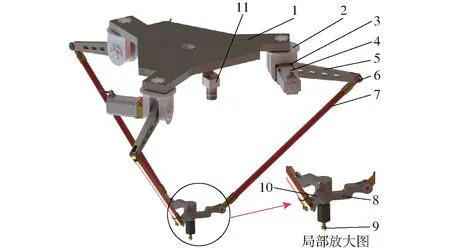
圖5 含末端鉸接桿的三平動并聯(lián)機器人Fig.5 Three-translational parallel manipulator with end hinged rods1.靜平臺 2.轉(zhuǎn)動叉 3.減速器裝置 4.驅(qū)動電機 5.主動臂 6.軸承 7.被動桿 8.末端鉸接桿1 9.末端執(zhí)行器 10.末端鉸接桿2 11.高速攝像機
1.4 機器人虛擬樣機設(shè)計
基于上述分析,設(shè)計出一種含末端鉸接桿的并聯(lián)機器人,虛擬樣機如圖5所示。靜平臺上的3個豎直轉(zhuǎn)動副圍繞靜平臺中心周向彼此相隔120°均勻分布。每條支鏈包含5個轉(zhuǎn)動副,且3條支鏈的末端鉸接于一點,形成復(fù)合鉸鏈。當3個轉(zhuǎn)動叉上的電機驅(qū)動時,末端執(zhí)行器可以實現(xiàn)三維移動輸出。需要說明的是,由于轉(zhuǎn)動叉上的電機繞一定點轉(zhuǎn)動,而并未隨整條支鏈做大范圍空間運動,故其不會帶來太大的運動慣量,這對整體系統(tǒng)的動力學(xué)性能有一定影響,但影響并不大。該機器人結(jié)構(gòu)簡潔緊湊,制造成本低,在3D打印運動執(zhí)行模塊設(shè)計及其他高速作業(yè)場合,如紡織/食品行業(yè)高速分揀、電子封裝等,具有較好的應(yīng)用價值。
2 機構(gòu)運動分析
2.1 位置逆解分析

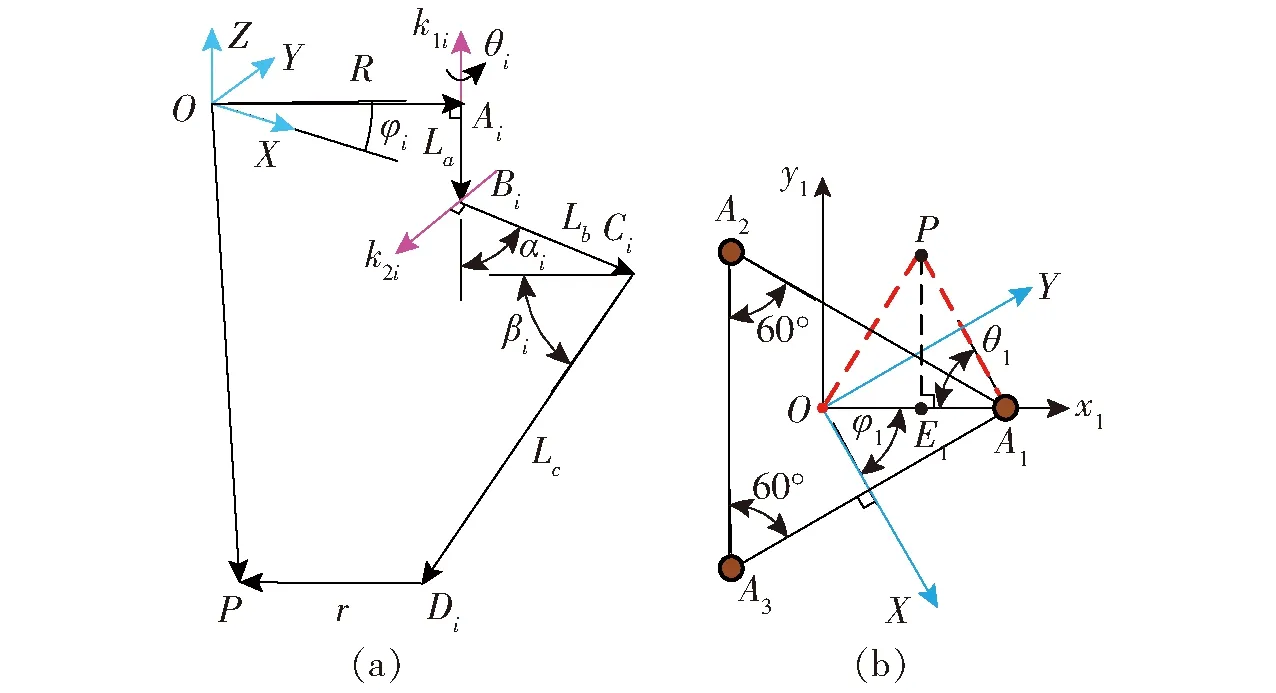
圖6 機構(gòu)支鏈閉環(huán)及靜平臺俯視圖Fig.6 Branch chain closed loop of mechanism and top view of fixed platform
末端參考點P在靜坐標系下坐標記為PO(x,y,z)。在俯視狀態(tài)下Z向坐標值可不考慮,從而將點P在靜坐標系OXY下的投影點坐標轉(zhuǎn)換至局部坐標系Oxiyi中,其坐標為
(8)

(9)
θi正負與點P在俯視狀態(tài)下的位置有關(guān)。例如在局部坐標系{S1}中,如圖6b所示的位置,點P在坐標系Ox1y1中的第一象限,此時θ1取正值。
在坐標系OXYZ下,有
(10)
(11)

(12)
化簡式(12)可得
Ai+Bisinαi+Cicosαi=0 (i=1,2,3)
(13)
其中
考慮到機構(gòu)的實際裝配,最終可得
(14)
αi取逆時針轉(zhuǎn)動為正方向。
假設(shè)機構(gòu)末端運動軌跡為
(15)
不失一般性,現(xiàn)給定機構(gòu)的一組尺度參數(shù)為La=0.1 m,Lb=0.25 m,Lc=0.6 m,R=0.3 m,r=0.1 m,將式(15)分別代入式(14)與式(9)中,得到3個主動臂的轉(zhuǎn)角隨時間變化曲線,以及3條支鏈繞點Ai處軸線的轉(zhuǎn)角隨時間變化曲線,如圖7所示。
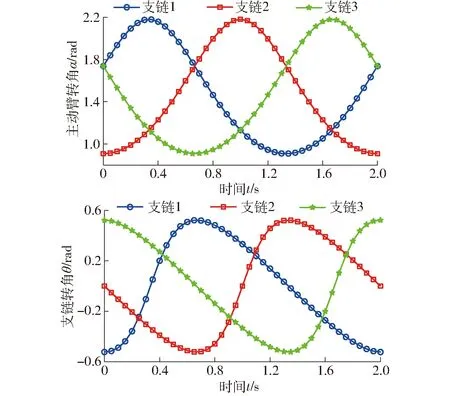
圖7 轉(zhuǎn)角變化曲線Fig.7 Angle variation curves vs time
由圖7可看出,轉(zhuǎn)角連續(xù)且隨時間呈周期性變化。
2.2 位置正解分析
正解分析是已知機構(gòu)3個主動臂的輸入角αi,求末端參考點P的三維坐標。
正解求解的方法主要有解析法和數(shù)值法兩類。解析法主要通過消元最終得到只含單個未知量的高次方程[19]。數(shù)值法又分為迭代法[20]和優(yōu)化方法[21],其中優(yōu)化方法是將對非線性方程組的求解轉(zhuǎn)換為對優(yōu)化問題的求解,而數(shù)值法的優(yōu)點是數(shù)學(xué)模型比較簡單,省去了繁瑣的數(shù)學(xué)推導(dǎo)。因此,本文采用數(shù)值法中的Newton迭代法[22-23]求解非線性方程組,輸入主動臂轉(zhuǎn)角,通過迭代計算,求出對應(yīng)的末端參考點位置。
已知末端點位置為(0.2, 0.1,-0.5) m,首先利用逆解式(14),計算出在此位置時3個主動臂的轉(zhuǎn)角,得到:α1=2.379 1 rad、α2=0.553 8 rad、α3=0.857 0 rad;然后將得到的3個轉(zhuǎn)角代入
(16)
式中,θi可用x與y表示。經(jīng)牛頓迭代運算可得末端點的位置為(0.2,0.1,-0.5) m,可看出,正解的輸出坐標與逆解的輸入坐標能夠完全對應(yīng),由此可證明以上關(guān)于位置逆解的推導(dǎo)正確。
2.3 速度分析
矢量OP用u表示,則閉環(huán)矢量方程為
u=lOAi+lAiBi+lBiCi+lCiDi+lDiP
(17)
將式(17)對時間求導(dǎo)可得
(18)
式中k1i——靜平臺Ai處豎直轉(zhuǎn)動副軸線的單位方向矢量
k2i——BiCiDi所在平面的單位法矢量
(19)
寫成矩陣形式
(20)

(21)
(22)
(23)
(24)
(25)
式中J——雅可比矩陣,表征了機構(gòu)末端速度與主動關(guān)節(jié)速度之間的映射關(guān)系

Jq——逆向雅可比矩陣
Jx——正向雅可比矩陣
2.4 加速度分析
(26)
(27)
對式(18)兩側(cè)再次求導(dǎo),可得
(28)
(29)
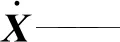
在給出的機構(gòu)參數(shù)下,將式(15)代入式(26)并進行數(shù)值計算,得到支鏈繞Ai處軸線轉(zhuǎn)動的角速率關(guān)于時間的變化規(guī)律,如圖8a所示;代入式(19)得到主動臂角速率關(guān)于時間的變化規(guī)律,如圖8b所示;代入式(29)得到主動臂角加速率關(guān)于時間的變化規(guī)律,如圖8c所示。
由圖8可看出,仿真曲線光滑、連續(xù)且無突變,且與前述轉(zhuǎn)角變化曲線呈導(dǎo)數(shù)關(guān)系。由于機構(gòu)對稱布置,且末端運動圓軌跡的圓心位于靜平臺中心所在的豎直直線上,因此仿真曲線隨時間呈周期性變化,由此可判斷機構(gòu)運行平穩(wěn)、連貫。
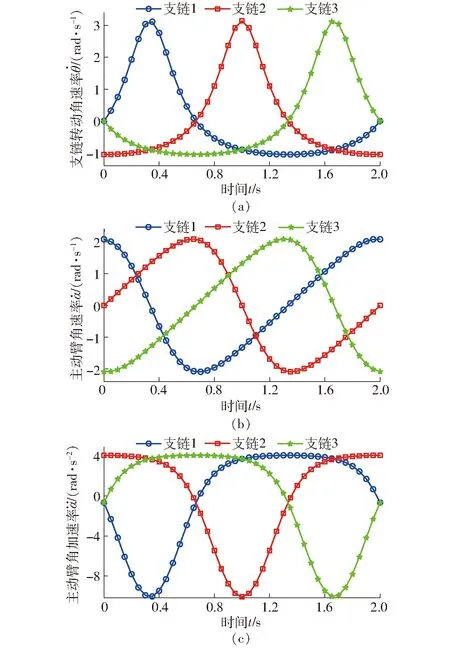
圖8 角速率與角加速率變化曲線Fig.8 Variation curves of angular velocity and acceleration
3 工作空間與奇異性分析
3.1 理論工作空間分析
機構(gòu)的理論工作空間是機構(gòu)動平臺(末端執(zhí)行器)所能到達的位置點的集合,對于此并聯(lián)機構(gòu),亦 即支鏈末端鉸接中心所到達位置點的集合。采用逐層搜索的方法搜索每一層點,對掃描到的點利用逆運動學(xué)關(guān)系求解其對應(yīng)的主動輸入角,若
αi,min≤αi≤αi,max(i=1,2,3)
(30)
即所有被掃描到的點都位于主動臂輸入角范圍內(nèi),則該點位于理論工作空間內(nèi),予以保存。由于機構(gòu)對稱布置,可設(shè)定每個主動臂轉(zhuǎn)角范圍相同,在此均取為-15°≤αi≤150°(i=1,2,3)。將掃描的邊界點取包絡(luò)面,即得到理論工作空間。算法具體步驟如下:① 如圖9所示,首先根據(jù)機構(gòu)參數(shù),預(yù)估工作空間的大致范圍,并取一個能夠涵蓋這一范圍的圓柱體。② 用垂直于Z軸的平面將上述圓柱體分成n層間隔為ΔZ的子平面,所有的子平面為相同的圓截面,且大于理論工作空間最大截面處的外接圓,從下往上逐層搜索。③ 采用極坐標搜索法,每個平面內(nèi)的每條極徑初值從0開始,逐次增加Δρ,由于受到桿長以及轉(zhuǎn)角范圍的限制,到ρmax停止;極角從0開始逐次增加Δγ到2π停止,接著搜尋下一層,如圖9中的第i-1層所示。④ 將所有子平面邊界點求出之后,再對整體邊界點取外包絡(luò)面,最終形成一個實體。依據(jù)上述算法,得到機器人的工作空間如圖10所示。
圖9 工作空間搜索示意圖Fig.9 Search schematic for workspace
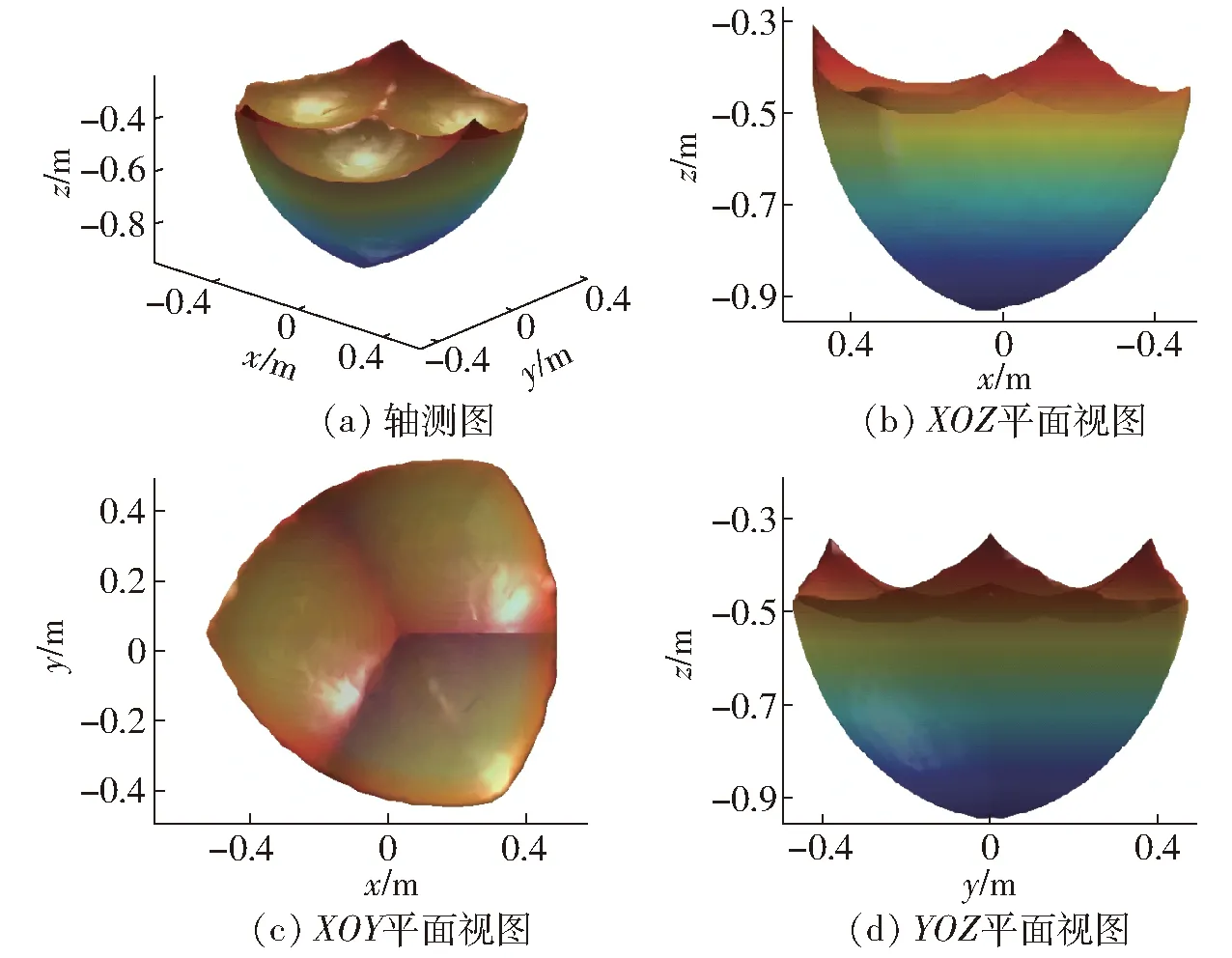
圖10 理論工作空間Fig.10 Three-dimensional views of theoretical workspace
3.2 實際工作空間分析
由于桿件之間可能存在一定約束,有些位置或不能到達。機構(gòu)運動時,其3條支鏈各自所在平面分別繞靜平臺Ai(i=1,2,3)點處豎直軸轉(zhuǎn)動,且DiP(i=1,2,3)3個桿分層鉸接于P處,當末端點運動軌跡在靜平臺三頂點外接圓內(nèi)時,不會發(fā)生干涉。當末端點運動軌跡在靜平臺外接圓外的某一區(qū)域時,由于3個鉸接桿的水平轉(zhuǎn)動副一端位于同一水平面上(圖5),在運動到某一位置時,可能發(fā)生重疊干涉。
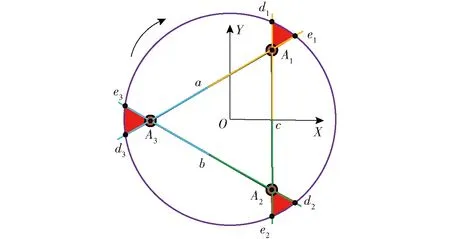
圖11 干涉位置分析Fig.11 Interference position analysis
如圖11所示,將機構(gòu)倒置,Ai(i=1,2,3)連接成等邊三角形。若末端執(zhí)行器在某一平面上按圖中紫色圓周軌跡順時針運動,三角形每個頂點處的支鏈會在相鄰兩邊與另一頂點處的支鏈在末端鉸接桿處產(chǎn)生重疊干涉。3條支鏈產(chǎn)生6次干涉情況,當末端執(zhí)行器處于點d1時,如A1處的黃色支鏈與A2處的綠色支鏈在邊c上重合,此時兩支鏈的末端鉸接桿產(chǎn)生重疊干涉;當末端執(zhí)行器運動到點e1時,A1處的黃色支鏈與A3處的藍色支鏈在邊a上重合,此時兩支鏈的末端鉸接桿產(chǎn)生重疊干涉;同理亦可得出其余4次干涉。經(jīng)分析,可得:①A1處的2次干涉位置之間形成一個夾角∠d1A1e1,末端點的運動在此處產(chǎn)生中斷,故圖中夾角對應(yīng)的紅色區(qū)域無法到達。② 同理,在A2處的2次干涉位置及A3處的兩次干涉位置之間分別形成夾角∠d2A2e2與∠d3A3e3,因此,其各自所對應(yīng)的紅色區(qū)域無法到達。
綜上所述,當末端點在大于Ai(i=1,2,3)外接圓半徑區(qū)域運動時,在3處區(qū)域存在干涉。因此在實際應(yīng)用時可將干涉位置加以識別并避開。
3.3 奇異性分析
機器人奇異位形分析[24]方法有多種,如運動學(xué)法、幾何法、代數(shù)法等。其中,代數(shù)法分析并聯(lián)機構(gòu)奇異位形實質(zhì)是判斷雅可比矩陣是否滿秩,若不滿秩則機器人出現(xiàn)奇異。本文基于雅可比矩陣分析該機構(gòu)的奇異位形。
3.3.1逆向運動學(xué)奇異
當逆向雅可比矩陣Jq奇異時,此并聯(lián)機構(gòu)處于逆向運動學(xué)奇異,此時det(Jq)=0,即
(31)

(1)當lCiDi與lBiCi重合時,即∠BiCiDi=0,只要有1條支鏈出現(xiàn)此種情況,連桿lBiCi與轉(zhuǎn)動叉之間,桿與桿之間則產(chǎn)生干涉,而在實際設(shè)計中不會出現(xiàn)這種情況。
(2)當lCiDi與lBiCi共線時,即∠BiCiDi=π,可得到3種可能奇異位形,如圖12所示。

圖12 逆向運動學(xué)奇異Fig.12 Reverse kinematics singularities
3.3.2正向運動學(xué)奇異


圖13 正向運動學(xué)奇異Fig.13 Forward kinematics singularities
3.3.3復(fù)合奇異
若機構(gòu)正向雅可比矩陣Jx與逆向雅可比矩陣Jq均奇異,則機構(gòu)會出現(xiàn)復(fù)合奇異位形的情況。經(jīng)以上分析可知,該機構(gòu)不會出現(xiàn)復(fù)合奇異位形。
4 性能分析及多目標優(yōu)化
4.1 靈巧度指標
利用雅可比矩陣條件數(shù)為指標來評價機器人的靈巧度,故一般也稱為靈巧度指標[26],定義為
(32)
一般多將κJ的倒數(shù)1/κJ作為衡量機構(gòu)性能的指標,定義為運動學(xué)局部靈巧度,其值越大越好,通過研究其在工作空間內(nèi)的分布情況,可了解機構(gòu)在不同位姿下的運動性能變化情況。以前述尺度參數(shù)(以下同)為例進行分析,如圖14所示,圖14a~14c為末端點在不同位置時的構(gòu)型圖,圖14e為在理論工作空間中靈巧度的四維分布圖,圖14d、14f為在不同截面上靈巧度的等高線分布圖。可看出,越往中心,機構(gòu)運動性能越好。
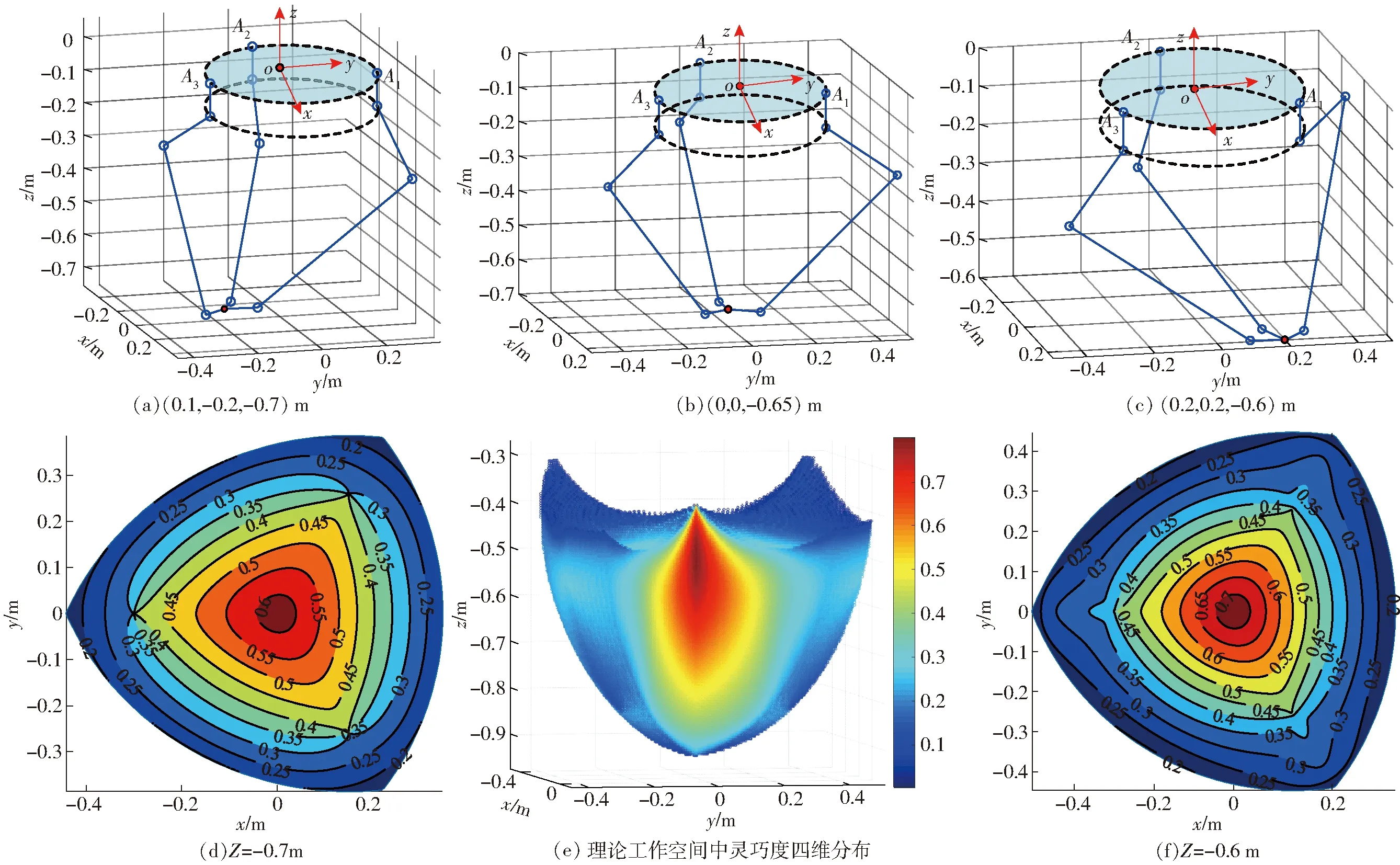
圖14 構(gòu)型圖與靈巧度指標分布Fig.14 Configuration maps and dexterity index distributions
4.2 速度、承載力、剛度指標
4.2.1速度指標
(33)
其中
J-1=Jf
式中Jf——并聯(lián)機構(gòu)正向運動學(xué)雅可比矩陣
(34)
令輸入速度矢量為單位矢量
(35)
(36)

4.2.2承載力指標
承載力是并聯(lián)機構(gòu)重要的性能之一,它決定了機構(gòu)能否支撐作用在動平臺上的外力。
廣義力和雅可比矩陣有直接關(guān)系。根據(jù)文獻[28],作用在動平臺上的外力F和主動關(guān)節(jié)的驅(qū)動力τ有關(guān)系
F=JTτ
(37)
承載力即定義為當驅(qū)動力矢量τ的模為1時,外力矢量F模的極值,即矩陣JJT的最大、最小特征值的開方
(38)
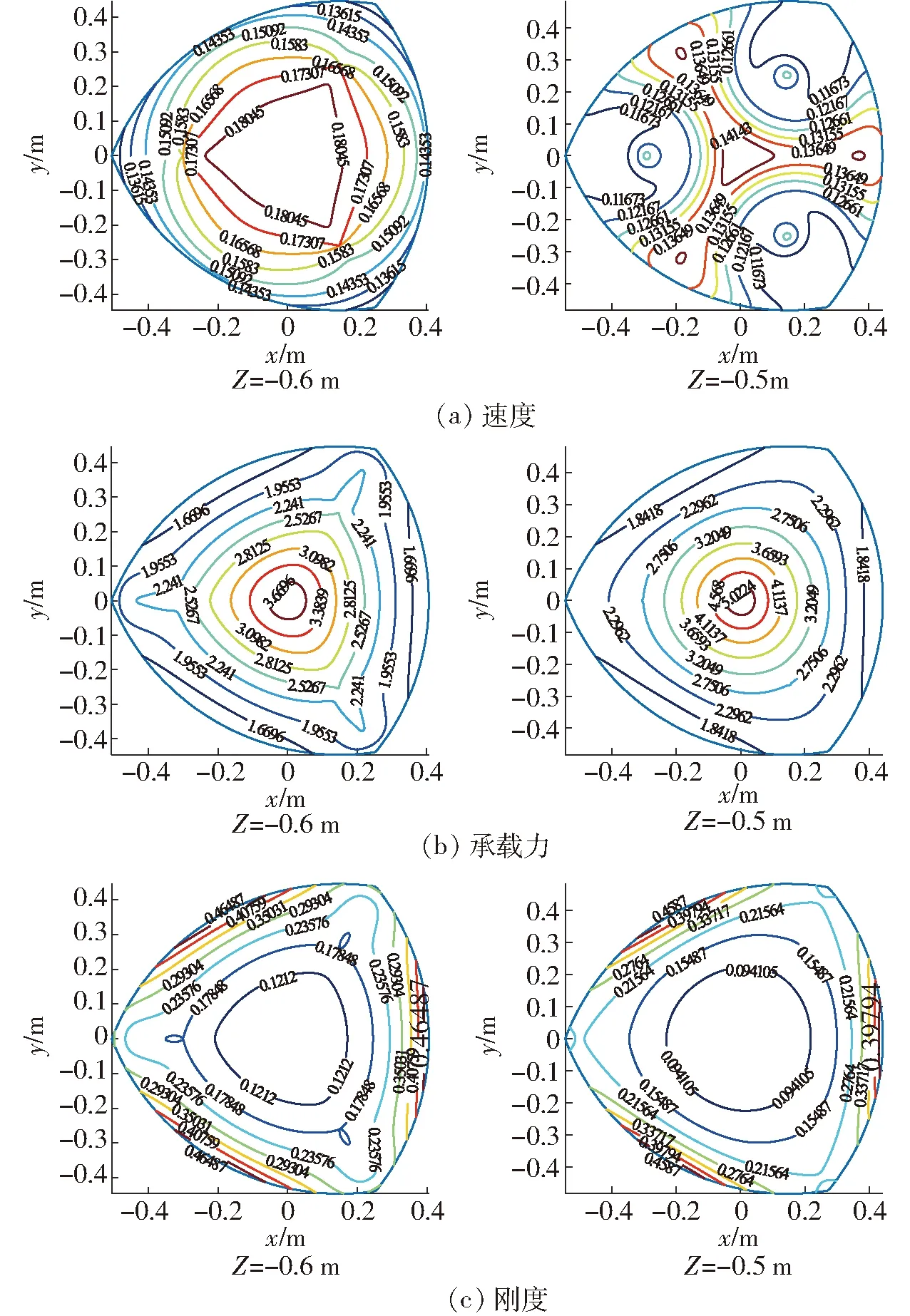
圖15 性能指標分布Fig.15 Distribution diagrams of performance indices
同樣期望最小承載力越大越好,即取最小承載力分析。圖15b為不同平面上的最小承載力指標等高線分布圖,可看出越往中心處最小承載力越大,且Z=-0.5 m平面上的承載能力更好。
4.2.3剛度指標
由于機構(gòu)在運動時受到外力作用會產(chǎn)生變形,且變形與構(gòu)件剛度有關(guān),而這些變形相互疊加就會產(chǎn)生較大的誤差,從而影響精度。因此剛度也是評價并聯(lián)機構(gòu)的一種重要性能指標[29]。由文獻[30]對于對稱式并聯(lián)機構(gòu),把每條支鏈中主動臂的剛度視為相等,且令其值為1,可得到機構(gòu)末端執(zhí)行器變形D與動平臺外力F的關(guān)系為
(39)
同樣定義末端執(zhí)行器的外力矢量的模為1,可得到末端變形的極值為
(40)
預(yù)期的最大變形越小,機構(gòu)的剛度性能越好,因此,僅考慮最大變形。圖15c為不同平面上的剛度指標等高線分布圖,可看出中心處變形量小于邊緣處,且Z=-0.5 m平面上的變形量相對更小。
4.3 多目標優(yōu)化
在給定工作空間內(nèi),由于機構(gòu)雅可比矩陣隨位形的變化而變化,因此靈巧度、速度、承載力以及變形極值也依賴于機構(gòu)的位形。在此定義機構(gòu)靈巧度、速度、承載力以及剛度的全域評價指標為
(41)
(42)
(43)
(44)
式中η(1/κJ)——靈巧度全域均值評價指標
ηFmin——最小承載力全域均值評價指標
ηDmax——最大變形全域均值評價指標
以靜平臺尺寸為基準,且避免末端鉸接桿重疊,將末端執(zhí)行器參考點的運動范圍限制在半徑R=0.3 m的圓柱中,得到工作空間如圖16所示。考慮轉(zhuǎn)動叉所在軸線,根據(jù)實際工程要求,選取半徑為r′=0.25 m,高為h=0.2 m的圓柱體為任務(wù)工作空間,記為Wt。同時,鉸接桿長度預(yù)設(shè)為r=0.1 m。
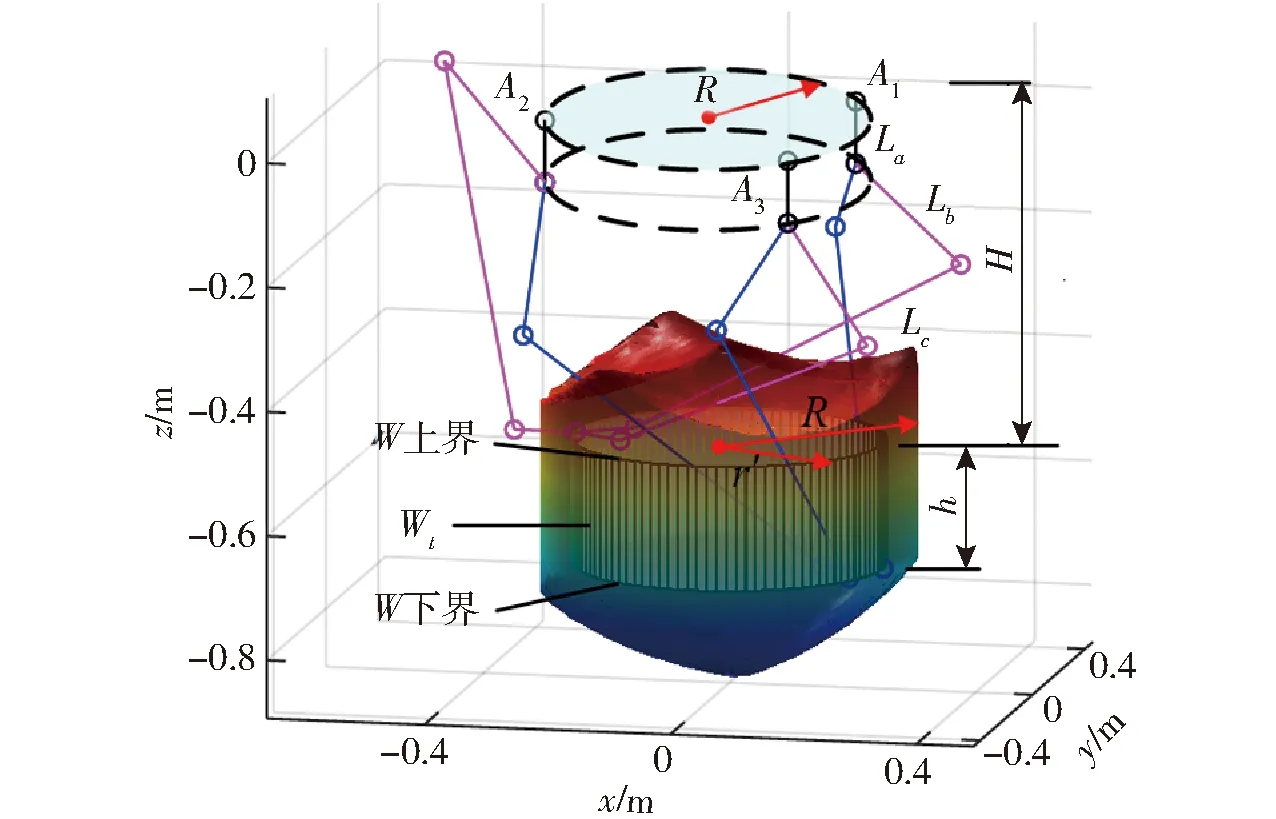
圖16 任務(wù)工作空間示意圖Fig.16 Schematic of task workspace
據(jù)此,該機構(gòu)的多目標優(yōu)化可歸結(jié)為:給定r′和h,確定尺度參數(shù)Lb、Lc、H,使得其任務(wù)工作空間內(nèi)綜合性能最優(yōu)。為滿足設(shè)計要求,綜合考慮機構(gòu)的靈巧度、速度、承載力及剛度等指標構(gòu)造優(yōu)化設(shè)計模型。研究發(fā)現(xiàn),上述指標具有矛盾性,靈巧度、最小速度指標以及最小承載力指標的數(shù)值越大越好,而最大變形則越小越好。因此為統(tǒng)一變化趨勢,定義子目標函數(shù),使單目標值越小越好。
(45)
設(shè)計變量包括主動臂長度Lb、從動臂長度Lc以及任務(wù)工作空間相對于靜坐標系的垂直位置H,記為x=(Lb,Lc,H)。綜合該機構(gòu)的結(jié)構(gòu)參數(shù)以及實際應(yīng)用需求,構(gòu)造多目標優(yōu)化設(shè)計模型[31]為
(46)
式中fi(x)——子目標函數(shù)
wi——權(quán)重,取w1=0.3,w2=0.1,w3=0.3,w4=0.3
為便于理解設(shè)計變量對目標函數(shù)的影響規(guī)律,利用Matlab求得目標函數(shù)與桿長以及H的關(guān)系,如圖17所示。
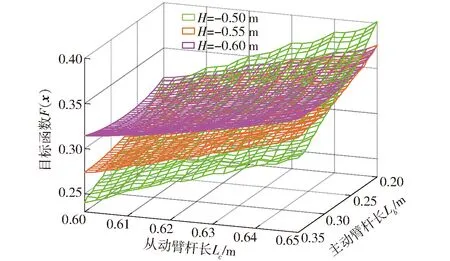
圖17 目標函數(shù)隨尺度參數(shù)變化規(guī)律Fig.17 Variations of objective function with scale parameters
由圖17可看出,目標函數(shù)的變化都與從動臂桿長的變化呈正相關(guān),且在H=-0.50 m和H=-0.55 m時,目標函數(shù)的最小值出現(xiàn)在主動臂桿長最大值附近,在H=-0.60 m時,目標函數(shù)的最小值出現(xiàn)在主動臂桿長取值范圍之間。進一步借助Matlab優(yōu)化工具箱中的遺傳算法[32]求解設(shè)計變量的最優(yōu)值,約經(jīng)過70次迭代,最終機構(gòu)尺度參數(shù)優(yōu)化結(jié)果見表1。
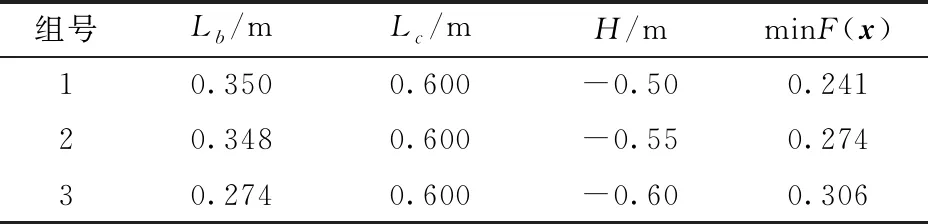
表1 優(yōu)化后機構(gòu)尺度參數(shù)Tab.1 Dimensional parameters of optimized mechanism
根據(jù)優(yōu)化結(jié)果,綜合考慮機構(gòu)的運動性能以及 具備較大的工作空間,選擇表1的第1組數(shù)據(jù)作為最終的尺度參數(shù)。其優(yōu)化前后空間投影視圖如圖18所示,結(jié)果表明,優(yōu)化后的機構(gòu)除了具備更好的運動性能外,還具有更大的理論可達工作空間。

圖18 優(yōu)化前后投影視圖Fig.18 Projection views of workspace before and after optimization
5 多體仿真校驗
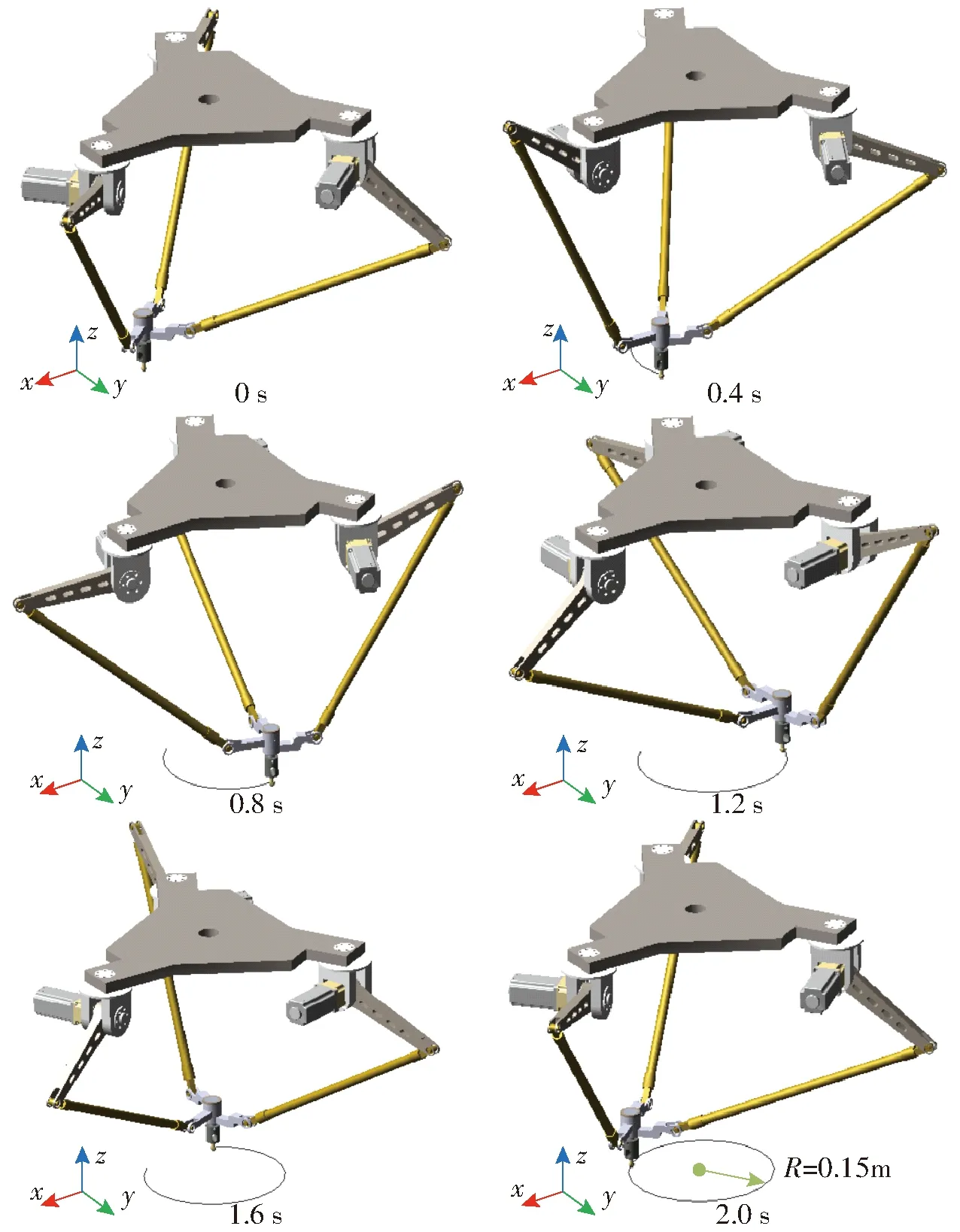
圖19 仿真過程中不同時刻機構(gòu)的運行狀態(tài)Fig.19 Running states of mechanism at different times during simulation process
為驗證前述機構(gòu)設(shè)計與運動學(xué)分析的正確性,借助多體軟件ADAMS開展虛擬運動仿真。首先,將SolidWorks中的三維虛擬樣機模型作適當簡化后,導(dǎo)入ADAMS中,定義約束并添加驅(qū)動。將第2節(jié)逆運動學(xué)中3個主動臂驅(qū)動轉(zhuǎn)角的輸出數(shù)據(jù),導(dǎo)入ADAMS中,作為主動關(guān)節(jié)的輸入,運用其強大的仿真求解功能,進行正向運動學(xué)分析,仿真輸出過程如圖19所示。將末端跟蹤軌跡與前述期望軌跡對比,可看出,末端執(zhí)行器參考點跟蹤軌跡與期望軌跡完全吻合,從而驗證了前述機構(gòu)設(shè)計與運動學(xué)分析的正確性與合理性,為基于該機構(gòu)的3D打印運動模塊制造及其拓展應(yīng)用提供了依據(jù)。
6 結(jié)論
(1)提出了一種拓撲演化設(shè)計方法,據(jù)此設(shè)計出了一種含末端鉸接結(jié)構(gòu)的新型并聯(lián)機構(gòu),基于螺旋理論分析可知,機構(gòu)末端具有三平動(3T)的能力。與現(xiàn)有機構(gòu)相比,該機構(gòu)僅含轉(zhuǎn)動副,結(jié)構(gòu)簡潔緊湊,制造成本低。
(2)借助幾何投影法和閉環(huán)矢量法,建立了位置約束方程,推導(dǎo)了機構(gòu)位置逆解,并分析了正解;通過求導(dǎo)法建立了速度、加速度映射模型,并得到了速度雅可比矩陣;進行了正/逆解數(shù)值驗證,為后續(xù)運動控制奠定了基礎(chǔ)。
(3)利用分層搜索的思想,得到了該機構(gòu)理論及實際可達工作空間,并對其進行了奇異性辨識,結(jié)果表明,在給定的輸入角范圍內(nèi),只存在逆向運動學(xué)奇異。
(4)對機構(gòu)靈巧度、速度、承載力以及剛度等性能進行了系統(tǒng)分析,繪制了相應(yīng)的性能圖譜。據(jù)此構(gòu)造了融合上述指標的目標函數(shù),完成了多目標優(yōu)化,得到了機構(gòu)最優(yōu)尺度參數(shù),為后續(xù)實體樣機制造提供了重要依據(jù)。在理論分析基礎(chǔ)上,進一步利用ADAMS軟件進行虛擬仿真,證實了該并聯(lián)機器人機構(gòu)設(shè)計可行性和理論分析正確性。
猜你喜歡
結(jié)構(gòu)工程師(2022年2期)2022-07-15 02:22:56
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:41
鐵道科學(xué)與工程學(xué)報(2015年5期)2015-12-24 12:11:58
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09
太陽能(2015年6期)2015-02-28 17:09:30
