基于單目偏折術的半球諧振子面域振型測量*
2022-11-02 11:38:44張祥朝李紹良趙萬良陳雨諾
飛控與探測 2022年4期
朱 睿,張祥朝,李紹良,趙萬良,陳雨諾,郎 威,徐 敏
(1. 復旦大學 上海超精密光學制造工程技術研究中心·上海·200438;2.上海航天控制技術研究所·上海·201109;3.上海慣性工程技術研究中心·上海·201109)
0 引 言
半球諧振陀螺儀是慣性導航制導、姿態穩定控制、慣性測量等單元中的關鍵部件,具有高精度、長壽命、高可靠性的特點,廣泛應用于航天、航空、艦船等武器裝備系統中[1]。半球諧振陀螺主要由激勵罩、內基座、外基座以及核心器件—半球諧振子構成,其工作原理是基于半球諧振子繞中心軸轉動時產生的哥氏效應,使其二階振型即四波腹駐波振動沿環向相對殼體進動。當殼體繞中心軸轉過ψ角時,振型相對球殼反向轉過α角,且有α=Kψ,K為振型的進動因子[2]。因此,只要精確測量出振型相對殼體轉過的角度α,就可得出殼體繞中心軸轉過的角度ψ[3]。
由于半球諧振子在加工過程中的內部缺陷、質量分布不均勻、殘余應力、幾何尺寸偏差等引起的零位偏置以及自身的能量損耗,易使得通過探測振幅恢復諧振子振型進而測量得到的殼體繞中心軸轉過角度ψ的過程出現偏差,影響慣性導航器件的定位精度。當前主要采用電容傳感器[4]、激光多普勒測振儀[5-6]等方式探測單點振幅,但是無法分離周向進動、振幅衰減等因素,導致探測誤差。因此,研究者不斷探索振動的面域測量方法,包括數字全息干涉技術、數字散斑干涉技術[7]、像點移動法[8]和條紋投影法[9-10]等。但這些方法或依賴于嚴苛的物理假設,或者只適用于粗糙表面,均不適合鍍膜前低反射率諧振子的振型測量。為此,本文提出了一種基于偏折術的振型測量技術,并發展了誤差分離與參數擬合算法,實現了半球諧振子振型的高精度面域測量。
1 振動偏折測量原理與光路設計
單目偏折測量的基本原理[11]如圖1所示,屏幕和相機同時面對被測鏡面且屏幕投影條紋圖案,經過被測鏡面反射后由相機拍攝成像。通過求解相機像素所拍攝到的屏幕條紋的相位,并與屏幕預設的相位進行比對,以獲得相機像素與屏幕像素的對應關系,即相機中Q點對應屏幕上的S點。基于針孔相機模型,可確定經過相機O點的光線QO,即反射光線r所在直線。在給定被測面的理想面形方程和其在空間中位置的條件下,反射點G可由直線QO與被測面方程的交點確定,因此,即可獲得相機點Q、屏幕點S、被測工件的反射點G的對應關系,進而確定入射光線i和反射光線r的方向。根據反射定律,入射角等于反射角,故角平分線v可由入射光線i和反射光線r計算得到。在測量過程中,角平分線同時也當作被測點G處的法向量n,再計算出被測點梯度[11-12],進而根據梯度積分可獲得被測面的三維面形[13-14]。
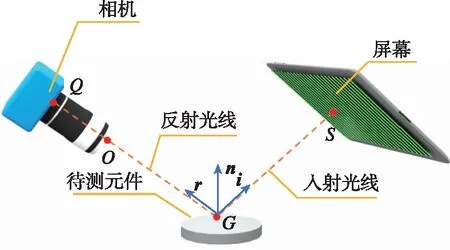
圖1 單目偏折測量原理示意圖Fig.1 Diagram of deflectometric measurement
半球諧振子的二階振型為四波腹駐波,在球坐標系下可表示為
r(φ,θ)=R+Amaxsin(ωT)cos(2φ+δ)sinθ
(1)
式中:r、θ、φ分別為徑向距離、方位角以及天頂角;R、Amax、ω分別為半球諧振子的半徑、最大振幅和振動頻率;T和δ代表時間和波腹所在位置的相位。將式(1)轉換至笛卡爾坐標系下,中間變量F表示為
F=(X2+Y2)(X2+Y2+Z2)-
(2)
式中:(X,Y,Z)表示球面上點的坐標,A=Amaxsin(ωT)。在駐波振動過程中,諧振子面形發生變化,進而引起被測點的法向量發生擺動。因此,從物方平面上圓斑發出的光束經振動過程中的諧振子反射,在像平面上形成振動拉長模糊斑,且其對應的運動軌跡與諧振子振型之間有著定量關系,所以位于諧振子振型不同位置處的法向擺動矢量不同,如圖2所示。但在實際中,法向擺動矢量難以直接量化使用,可將其進一步轉換為法向在經緯方向上的擺動角度,其中在以唇緣為赤道、以半球殼和中心軸交點為極點的球坐標系下定義經線與緯線方向,由此推導出與振型相關的數學模型。
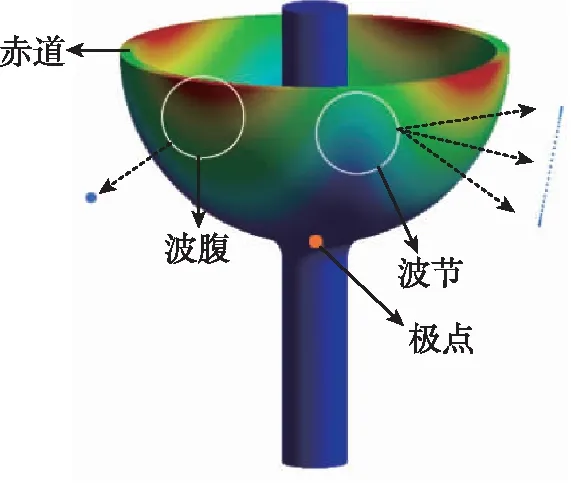
圖2 波節波腹處法向擺動矢量示意圖Fig.2 The swing vectors at the node and antinode
由于半球諧振子為凸球面且曲率大,反射光線所形成的發散角大,使得相機只能探測到諧振子的小部分區域。于是在系統中增加一個凹面反射鏡,并通過遍歷選擇最優系統中的元件幾何參數和位置。為了避免像平面上不同的振動拉長模糊斑之間發生混疊,以及系統中的像差引起像平面上的圓斑發生嚴重變形,在物方平面上設計相應的二值化圓斑分布圖樣,使得像平面上的圓斑幾乎呈行列規則分布。測量系統示意圖如圖3所示。
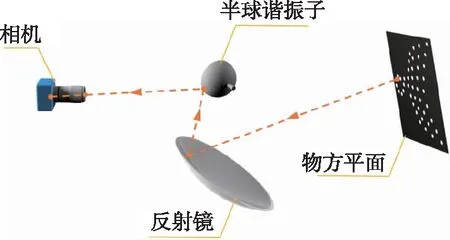
圖3 振型偏折測量系統示意圖Fig.3 The deflectometric measurement system of vibration modes
2 半球諧振子振型的定量表征
2.1 運動軌跡提取
半球諧振子面形重構以及半徑擬合的方法如下所述。基于半球諧振子的名義面形,通過光線追跡求得諧振子上被測點的坐標、初始法向量和梯度,再以物方平面上光線追跡的交點與實際物點的重投影誤差作為目標函數,由Levenberg-Marquardt (L-M)法最小化目標函數。通過優化后的被測點法向量計算梯度,由Modal法重建面形[15]并擬合諧振子半徑,再重新求得諧振子上的被測點,重復上述過程直到收斂。
像面上的振動拉長模糊斑可通過維納濾波解卷積提取運動軌跡。維納濾波解卷積的方法在頻率域f中[16]描述如下
(3)
式中,H、F、G分別表示靜止圖像圓斑、振動拉長模糊斑和運動軌跡的傅里葉變換;上標*表示復共軛;λ是與信噪比S相關的阻尼系數。
2.2 局部轉換關系及縮放比例求解

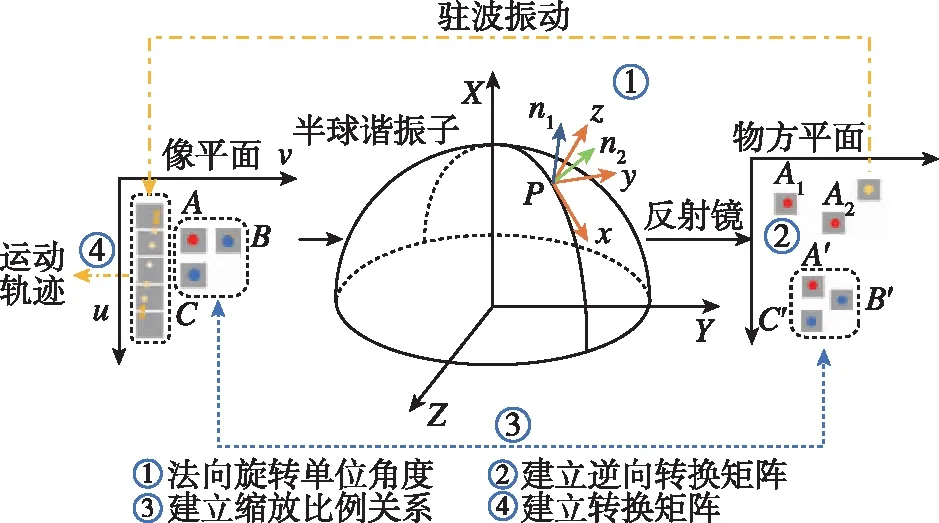
圖4 轉換矩陣計算示意圖Fig.4 Calculation of conversion matrices
當通過維納濾波解卷積提取得到運動軌跡矢量[ΔU, ΔV]時,可由式(4)分解
(4)
式中,γ和η是法向分別在緯度和經度方向的擺動角度。
2.3 駐波振型參數擬合
在諧振子鍍金屬膜層之前仍為熔融石英材料,無法通過電極激勵產生駐波振動,可將激勵方式替代為在某點處進行機械敲擊,進而產生駐波振動。但此種方式可能導致諧振子在駐波振動的同時還存在以夾持點為固定點的懸臂擺動,因此需要將兩種運動分離。
諧振子振型擬合過程如下。諧振子表面有M個被測點。首先計算各被測點在緯線和經線方向上的法向擺動角度γ和η,被測點的坐標(Xj,Yj,Zj)由面形重構計算得到。將最大振幅Amax,位姿角β、δ和被測點坐標(Xj,Yj,Zj)代入式(2),分別在sin(ωT) = 1和0的情況下,推出法向量表達式如下
(5)
式中,上標E和S分別表示極端情況sin(ωT) = 1和靜態情況sin(ωT) = 0。再將上述法向量歸一化后,表示為N。因此,由歸一化的法向量推出的法向擺動矢量的解析表達式為
(6)
式中,ΔN即為法向擺動矢量。然后,定義目標函數如下,并通過L-M法求解參數。
(yj·ΔNj-ηj)2]
(7)
式中,x和y是沿經線和緯線切向方向的單位向量。駐波擬合過程如圖5所示。
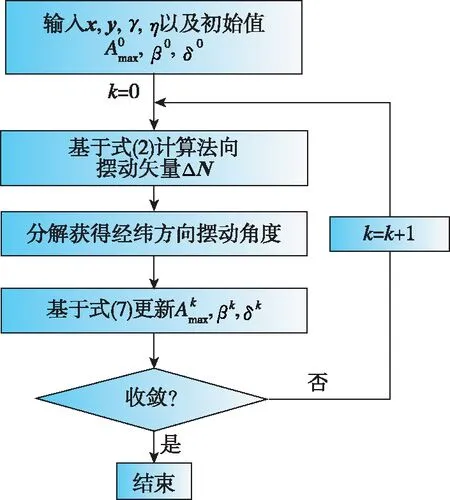
圖5 振型參數擬合流程圖Fig.5 Parameter fitting of vibration modes
3 半球諧振子振型測量實驗驗證
為了驗證所提出的振型測量方法的可行性,搭建了偏折測量實驗系統,如圖6所示。其中,采用工業相機MV-CA016-10UM,相機上安裝了定焦鏡頭Computar M7528-MP。凹面反射鏡的口徑和曲率半徑分別為140mm和110mm。
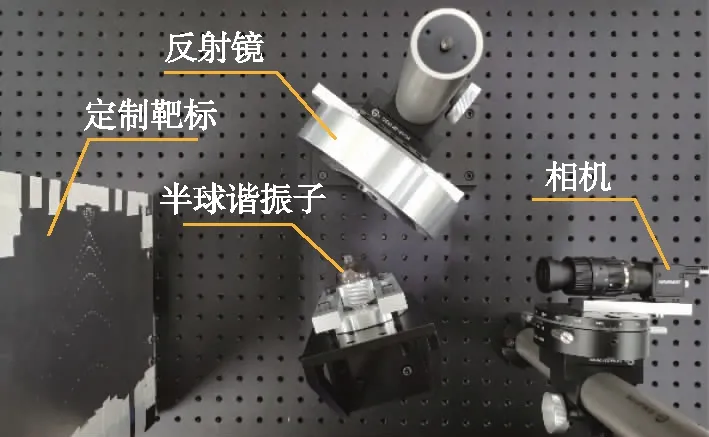
圖6 實際測量系統圖Fig.6 The actual measurement setup
通過三坐標測量機獲得各元件在世界坐標系下的位姿。相機的外參由Perspective-n-Point算法得到[18],相機幀率設置為60幀/s,曝光時間為10ms。最終用于分析的圖像如圖7所示,迭代收斂結果如表1所示。

(a) 靜止圖像

(b) 振動圖像
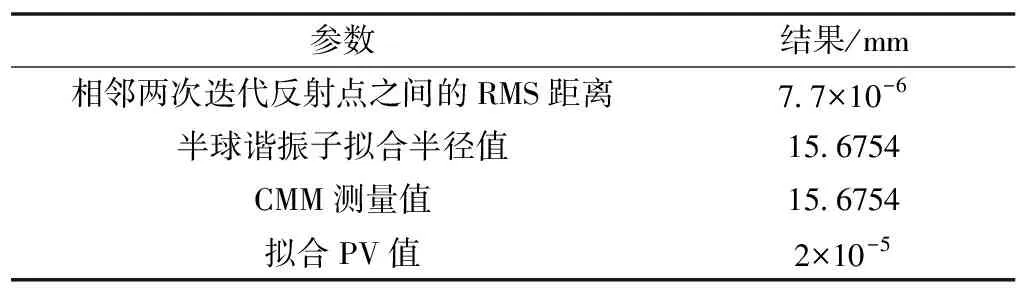
表1 迭代收斂結果
將圖7中的振動拉長模糊斑與其對應的靜止圖像逐一分離并提取運動軌跡,部分運動軌跡如圖8所示。為了減小解卷積時振鈴效應的影響,對兩側邊緣區域的灰度分布進行二次函數擬合,由此獲得灰度峰值處的亞像素坐標,進而提高振型擬合的準確性。由提取出的運動軌跡矢量可計算出其平均模長為11.14像素,運動軌跡矢量的均方根值(Root Mean Square, RMS)為7.895像素。然后,計算出被測點的法向在緯線和經線方向上的擺動角度γ和η。再擬合半球諧振子的駐波振型參數,Amax、β和δ的值分別為4.2μm、48.9°和93.4°。基于式(2)恢復振型,結果如圖9所示。
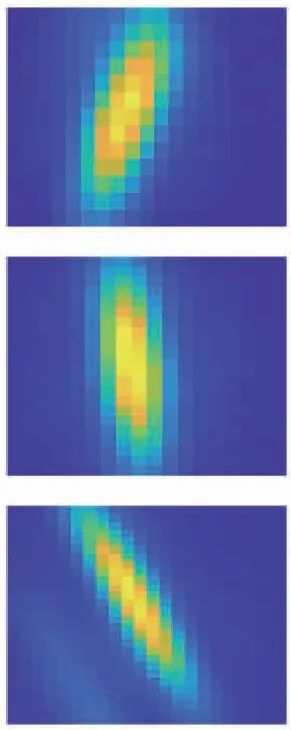
(a) 靜止圓斑
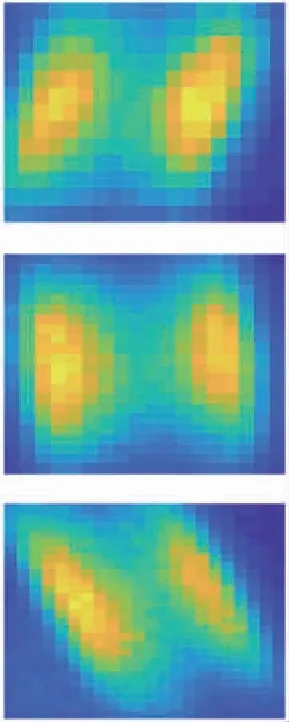
(b) 拉長模糊斑
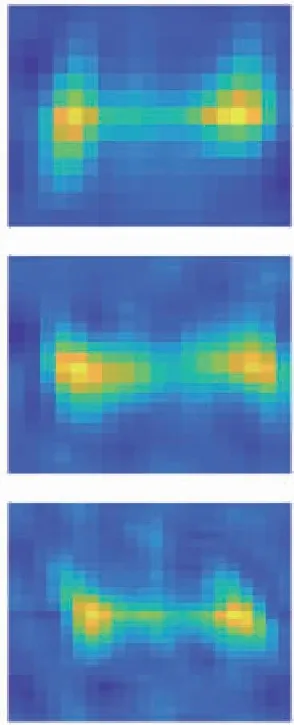
(c) 運動軌跡
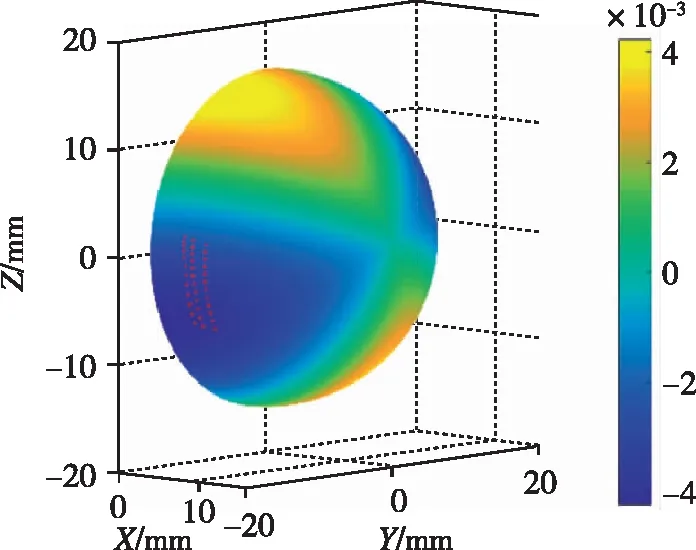
圖9 半球諧振子恢復振型Fig.9 The reconstructed vibration mode of hemispherical shell resonator
通過2.3節中描述的方法擬合諧振子以夾持點為固定點的懸臂擺動,垂直于Y軸和Z軸平面內擺動角度分別為0.12°和-0.27°。在擬合駐波振型和懸臂擺動后的殘差如圖10所示,剩余殘差控制在1.5像素以內,殘差的RMS為0.729像素,小于運動軌跡矢量RMS的10%。經分析認為,存在剩余殘差主要有兩個原因:一個是機械敲擊導致固定點的坐標發生微小位移,使得懸臂擺動時的固定支點坐標存在誤差,影響懸臂擺動角度值的擬合精度;另一個是電荷耦合器件(Charge-Coupled Device, CCD)像素離散化效應,使得難以準確提取出運動軌跡兩端灰度值最大的像素坐標,影響運動軌跡矢量計算的準確性,進而影響法向擺動角度計算的準確性及駐波擬合精度。
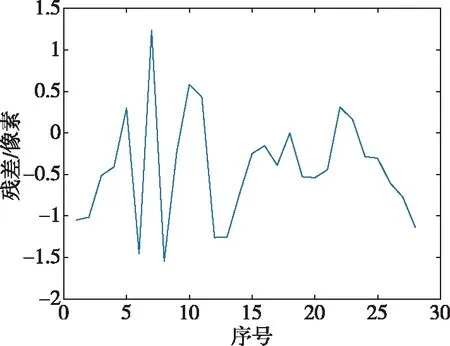
(a) 列方向殘差
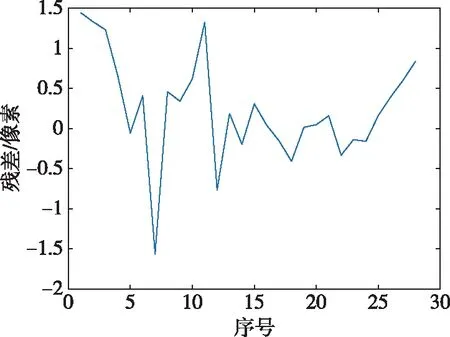
(b) 行方向殘差圖10 擬合殘差圖Fig.10 Residuals after fitting
4 結 論
本文提出了一種基于單目偏折測量技術的半球諧振子振型測量方法,將局部振幅探測轉換為法向擺動角度的檢測。該方法具有效率高、抗噪能力強的優點。此方法優于單點振幅檢測,可有效測量諧振子振型的面域分布,從而將零位漂移和振幅衰減引起的振型變化與駐波進動引起的振型變化分離。實驗結果表明,所提出的方法可提取出運動軌跡,并精確擬合出駐波振型。該方法對半球諧振陀螺的動力學特性和慣性系統性能的進一步研究具有重要意義。由于對比測量條件限制,現階段無法提供可用于比對的參考數據,所以將進一步探究與現有方法的驗證和比較。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21