干擾和執行器故障下的艦載機著艦容錯控制系統
2022-11-02 09:37:30段海濱張秀林
南京航空航天大學學報 2022年5期
段海濱,袁 洋,張秀林
(1.北京航空航天大學自動化科學與電氣工程學院,飛行器控制一體化技術國防科技重點實驗室, 北京 100083;2.中國航空工業集團公司沈陽飛機設計研究所,沈陽 110035)
航母戰斗群是現代海軍中重要的軍事力量,是各國鞏固國防力量和提升國際地位的重要基石。艦載機作為航母戰斗群中空防力量的重要體現,在軍事領域中有著重要的地位。作為艦載機海上實戰化應用的一個前提條件,艦載機著艦技術受到了廣泛的關注[1-4]。不同于陸基飛機,艦載機的起降在狹小的甲板上完成,著艦環境存在艦尾流、海浪等復雜干擾,著艦失敗甚至會導致機毀人亡的嚴重事故。因此,著艦系統對魯棒性具有嚴格的要求。
文獻[5]介紹了F/A-18艦載機自主著艦系統的主要組成部分和比例-積分-微分(Proportional-integral-differential,PID)著艦控制策略。經典PID 控制策略包括導引律,自動駕駛儀,內環增穩控制和自動油門控制。與一般飛行模態增穩系統不同,艦載機著艦系統的內環增穩控制需要實現快速跟蹤,因此需要較高的控制增益。為設計魯棒性強和跟蹤精度高的艦載機著艦系統,研究人員開展了大量的工作。
針對艦載機動力學線性化模型,文獻[6-7]提出了基于H∞控制方法的自主著艦系統,在陣風干擾和傳感器噪聲干擾下,著艦過程中艦載機能保持恒定的飛行路徑角,對縱向速度指令也能快速響應。文獻[8]分析了艦載機在進近末端湍流條件下的縱向動力學和線性化模型,提出了一種基于高頻增益矩陣LDU 分解的穩定自適應控制方案,保證了閉環穩定性和輸出漸近跟蹤。文獻[9]利用擴展狀態觀測器對艦載機內部動力學不確定性和外部干擾進行估計,設計基于跟蹤微分器的甲板運動補償來消除著艦系統的相位滯后,并且提出了一種基于Levy 飛行的鯨魚優化算法對控制器參數進行優化。文獻[10]提出了一種保證最優跟蹤性能的艦載機預見控制自動著艦系統,利用粒子濾波進行艦載機甲板運動預測,采用預見控制研究了具有非線性和多變量耦合系統動力學的著艦控制問題。然而,當系統高度非線性或不確定時,線性模型不再有效,導致控制器的性能受到限制[11]。
針對非線性動力學模型,文獻[12]研究了存在模型不確定性、甲板運動和尾流干擾的艦載機著陸控制問題。針對一類非線性多變量系統,將參數自適應和滑模微分器相結合,提出了一種自適應超扭控制方案,保證了自動著艦的跟蹤精度、快速性和魯棒性。文獻[13-14]結合非線性觀測器,在精確估計和補償外部擾動的同時,獲得整個著陸系統的全局漸近穩定性。文獻[15]研究了艦載機自動著陸的固定時間控制問題,提出了一種以反演控制技術為主要控制框架的高階多變量系統定時控制方法。為了使閉環系統具有完全的定時收斂性能,在控制結構中引入了定時干擾觀測器,有效地估計外界干擾。文獻[16-18]設計了基于滑模控制的自動著艦系統,并建立了甲板運動預測模型,使得無人機可以跟蹤參考下滑軌跡,實現精準著艦。
在上述研究的基礎上,本文考慮了艦載機執行器故障的情況。在飛行控制系統中,執行器故障可能會降低飛行性能,甚至導致災難性后果,因此設計容錯控制系統非常重要[19]。本文針對執行器故障的艦載機著艦問題,設計了一種著艦容錯控制系統。該系統利用自回歸模型進行甲板運動預測,疊加到理想下滑軌跡上生成參考軌跡;利用基于干擾觀測器的快速終端積分滑模控制器來處理艦尾流和執行器故障的集總干擾。最后,通過與經典PID方法對比,驗證了本文提出方法的有效性。
1 研究對象和問題
1.1 研究對象
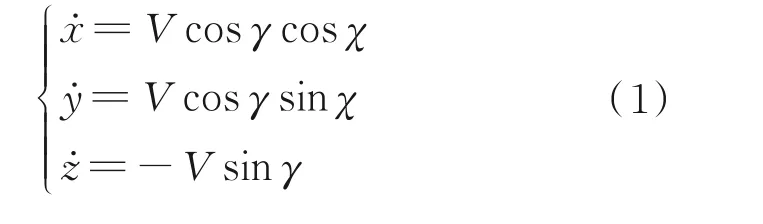
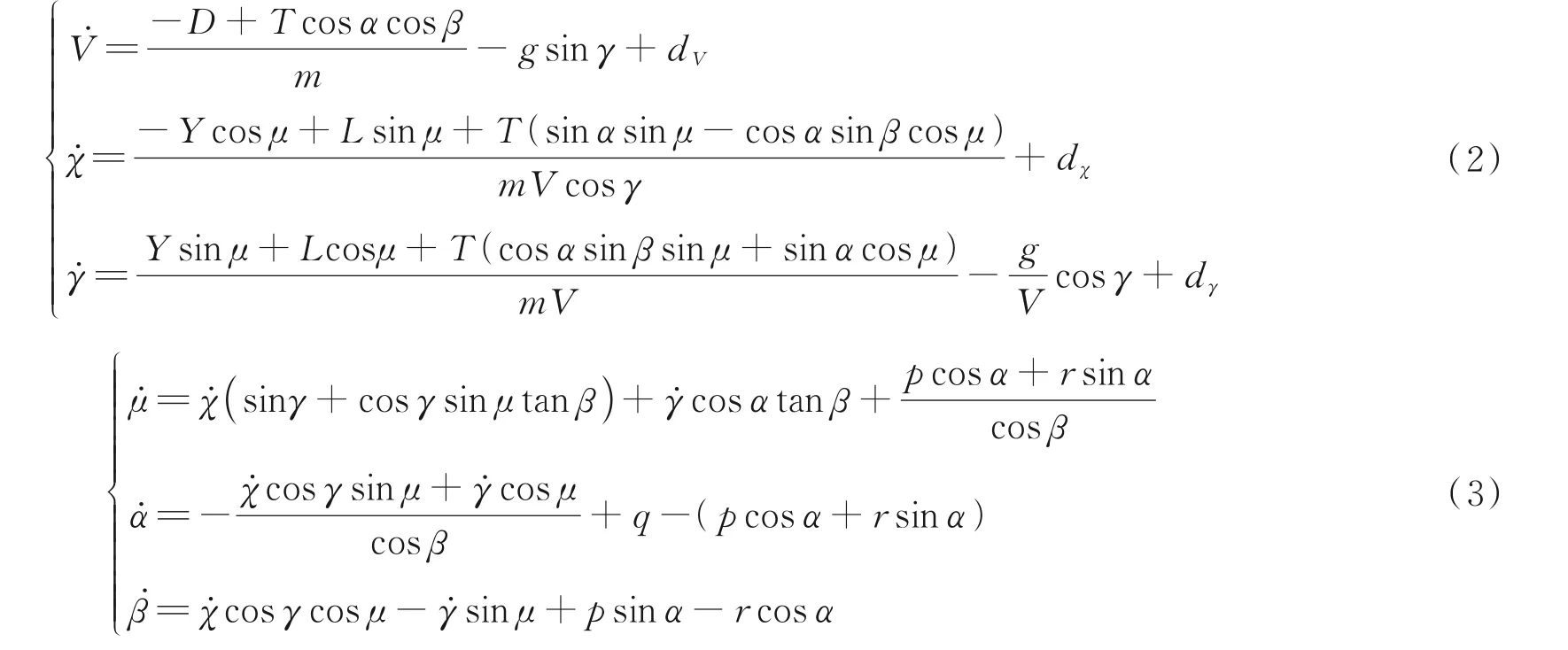
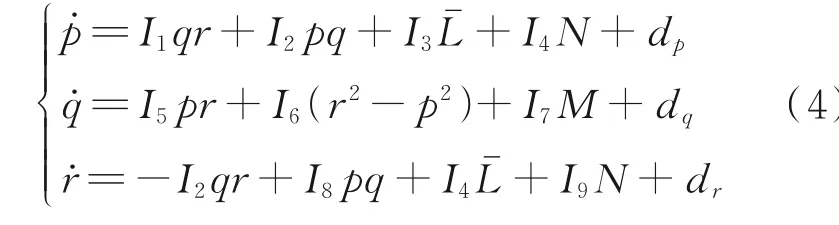
本文研究的艦載機六自由度非線性模型方程如下[13-15]
在實際飛行系統中,艦載機可能會遇到執行器故障的情況。艦載機的執行器包括油門、升降舵、副翼和方向舵,油門故障和舵面故障可以分別描述為
式中:i∈{e,a,r},ρT和ρi為小于1 的正常數,表示執行器故障程度;μT和μi為未知有界偏差。
艦載機在海風和波浪影響下的六自由度運動可以近似于一般剛體的運動,由于線性運動和角運動導致的理想著艦點的位置變化分別為[Δx1,Δy1,Δz1]和[Δx2,Δy2,Δz2][17]。理想著艦點的位置[xc,yc,zc]可以表示為
式中:Vs為艦載機的航行速度;航向角ψs為0°,ψ0表示艦載機航行速度方向和甲板中線的夾角。
1.2 研究問題
艦載機著艦問題如圖1 所示。在著艦過程受到艦尾流、海風和波浪等外界干擾,同時還可能遭遇執行器故障等不利情況,會造成艦載機控制性能下降甚至失穩。面對不利條件,為保證艦載機著艦的安全性和提高著艦成功率,必須開發艦載機容錯著艦控制系統,使艦載機高精度、快速地跟蹤參考降落軌跡,以達到理想的著陸點。
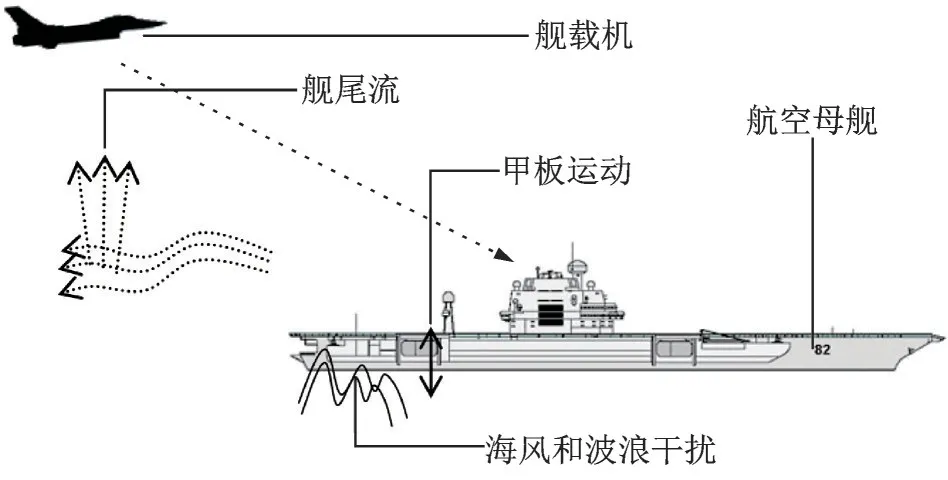
圖1 艦載機著艦問題示意圖Fig.1 Schematic diagram of the carrier landing problem
本文提出了一種由艦載機著艦導引和艦載機容錯控制組成的艦載機容錯控制系統。在艦載機著艦導引中,包含基于自回歸模型的著艦軌跡生成和著艦導引律設計。利用自回歸模型進行甲板運動預測,疊加到理想的下滑軌跡上,生成參考著艦軌跡;同時,為實現快速跟蹤,設計了新的著艦導引律。艦載機容錯控制系統采用低通濾波器作為指令生成器,快速終端滑模控制器作為基控制器,并設計了干擾觀測器對集總誤差進行觀測,實現了對著艦系統的精準穩定控制。
2 艦載機容錯著艦控制系統設計
2.1 艦載機著艦導引
2.1.1 著艦軌跡生成
記船的理想下滑軌跡為[xd,yd,zd],其中xd為無人機的前向位置x,yd為理想著艦點的橫向位置,zd可以表示為

式中:h表示無人機相對于甲板在慣性系中的高度;γc表示下滑航跡角,為常值。由于海風和波浪干擾導致甲板運動,使得理想著艦點位置變化,帶來一定的側向偏差和高度偏差,因此在下滑道指令上疊加理想著艦點的側向位置和高度變化。由于數據傳輸延遲和自主著艦系統中存在相位滯后的情況,在疊加甲板運動補償指令時需要有一定的超前,本文通過對甲板運動進行預測來實現超前補償。
自回歸模型是時間序列的一種處理方法,在本文中用來對甲板運動進行建模和預測。自回歸模型一般描述為

式中:x(t)為t時刻的系統狀態;ai(i=1,2,…,p)為模型參數;p為模型階數;ζ為隨機噪聲。在確定模型階數和預測步數N后,利用遞推最小二乘法辨識自回歸模型參數,得到ai(i=1,2,…,p)的辨識值a^i(i=1,2,…,p)。在線獲取到模型參數后,對預測步數為l(1 ≤l≤N)時刻的甲板運動進行預測,獲取理想著艦點的位置,預測表達式為

式中x^ (t+l) 表示t時刻向前l步的系統預測狀態。
在著艦前期,甲板運動的影響可以忽略。在著艦后期加入甲板運動導致的著艦點變化量得到參考的艦載機著艦下滑軌跡。
2.1.2 著艦導引律設計
記2.1.1 得到的艦載機側向和縱向參考下滑軌跡為X1r=[yr,zr]。設計一階低通濾波器作為參考模型得到X1r的參考值X*1和其一階導數

式中τ1為時間常數。
設計著艦導引律為

式中:K1=diag(k1,k2)和K2=diag(k3,k4)為正定矩陣,sigα1(eX1)=sgn(eX1)|eX1|α1,sgn( ·)表示符號函數,eX1=X*1-X1,0 <α1<1。


2.2 艦載機容錯控制設計
2.2.1 航跡方位角控制器設計
將式(2)中航跡角動力學方程表示成仿射形式
式中,d~fχ=d^fχ-dfχ為干擾估計誤差。構建干擾觀測器如下
2.2.2 混合角控制器設計

2.2.3 角速度控制器設計
定義uact=[δe,δa,δr]T,將式(4)寫為仿射形式

式中:f3=


式中:k9、k10和α7為正常數,0 <α7<1;d^X3為dX3的估計值。
構建干擾觀測器如下
2.2.4 迎角保持控制器設計
艦載機在著艦過程中處于低動壓狀態,具有靜不穩定的反區特性。因此,為提高飛行質量,需要引入動力補償系統,本文采用迎角恒定的自動油門控制方案。迎角的動力學模型可以表示為
式中:k11、k12和α9為正常數,0 <α9<1;d^fα為dfα的估計值。干擾觀測器設計如下


2.2.5 穩定性分析

同2.1.2 節的分析相同,根據楊氏不等式,設計參數可使得V2一致有上界,因此滑模面si(i=1,2,3,4)有界。根據快速終端滑模的研究,跟蹤誤差一致有上界。
3 仿真結果與分析
3.1 參數設置
這里,選用F/A-18A 作為研究對象,其模型參數在文獻[20-21]中給出。理想航跡傾斜角γr和理想迎角αr分別為-3.5°和8.1°。飛機和航母的初始位置分別為(0,0,-185)m 和(3 200,0,0)m。假設相對于船舶重心的理想著陸點為(-90,-20,5),F/A-18A 的初始狀態如表1 所示,航母的速度為10 m/s。

表1 F/A-18A 初始配平狀態Table 1 Initial trim states of F/A-18A
控制器參數設置如下:τi=0.1(i=1,2,3,4),K1=diag(0.4,0.4),K2=diag(0.9,0.7),α1=0.8,λ1=0.5,α2=1.5,k5=6,k6=0.6,α3=0.6,η1=10,γ1=2,λ2=2,α4=1.5,k7=1.3,k8=0.6,α5=0.6,η2=8,γ2=5,λ3=0.6,α6=1.4,k9=0.2,k10=0.4,α7=0.8,η3=8,γ3=5,λ5=1,α8=1.2,k11=0.1,k12=0.5,α9=0.6,η4=10,γ4=2。執行器故障設置如下:ρT=0.1,μT=0,ρe=0.05,μe=2/57.3,ρa=0.1,μa=-3/57.3,ρr=0.1,μr=3/57.3。
3.2 仿真結果
采用PID 方法進行對比仿真,仿真結果如圖2~6 所示。圖2 為使用本文方法進行著艦的三維軌跡示意圖。圖2 表明,在提出的著艦容錯控制系統控制下,飛機可以順利完成著艦任務。圖3 給出了使用本文方法和PID 方法得到的側向艦載機著艦偏差。從圖3 中可以看出,采用PID 方法的著艦控制策略在面對外界干擾和執行器故障的情況下具有較大的側向誤差,且跟蹤誤差波動較為劇烈,而本文提出的方法跟蹤誤差穩定,在著艦時刻誤差僅為0.008 m。圖4 為艦載機與航母在縱向上的位置誤差。PID 和本文方法均能跟蹤艦載機下滑軌跡,但是本文提出方法在著艦末端的跟蹤誤差僅為-0.013 m,而PID 的跟蹤誤差為0.327 m。圖5給出了恒定迎角的自動油門控制效果。可以看到,采用本文方法的艦載機迎角在下滑段初期有一個較大的迎角變化以實現快速跟蹤的目的,然后較快地回到理想值并能保持較小的波動,而PID 的迎角波動較大,在著艦時刻的迎角值分別為8.151°和8.103°,本文提出的方法能更好地保證迎角穩定,從而實現故障情況下的精準著艦。圖6 為迎角受到的集總干擾觀測結果。圖6 結果表明,本文所設計的干擾觀測器可準確估計執行器故障和外界干擾,在設計控制器時能有效消除外界不利因素對自主著艦的影響。
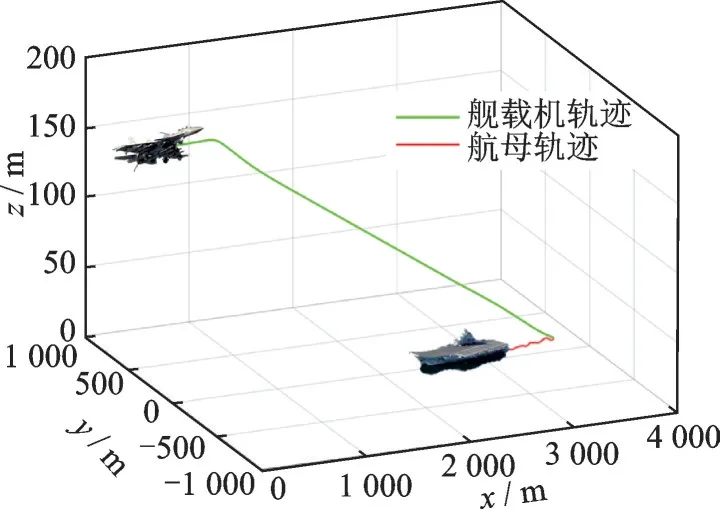
圖2 艦載機著艦軌跡Fig.2 Landing trajectory of the carrier-based aircraft
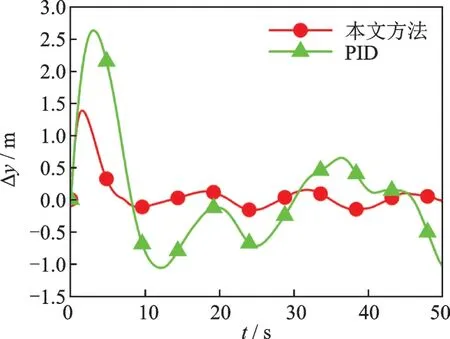
圖3 艦載機著艦側向偏差Fig.3 Lateral deviation during the carrier landing
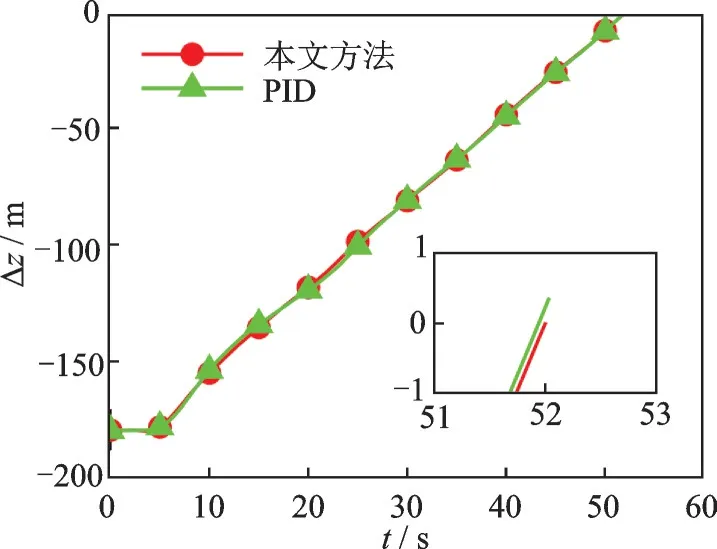
圖4 縱向艦載機著艦偏差Fig.4 Vertical deviation during the carrier landing
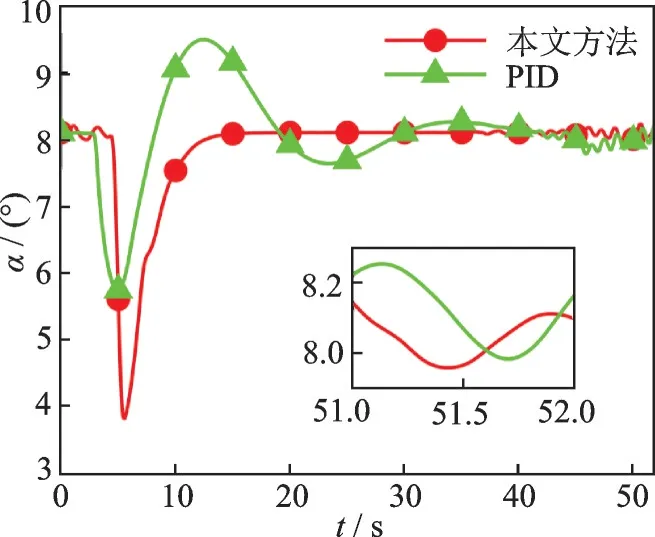
圖5 艦載機著艦迎角Fig.5 Angle of attack during the carrier landing
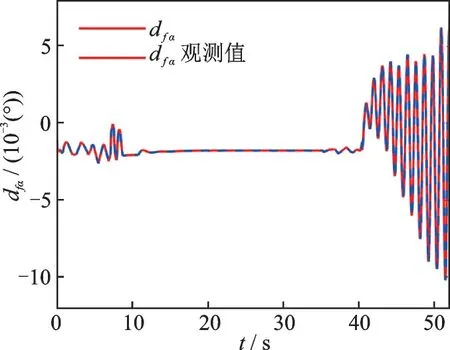
圖6 迎角干擾觀測結果Fig.6 Disturbance observed result for the angle of attack
綜上所述,本文所提出的艦載機著艦容錯控制系統相較于傳統的PID 控制方法,具有更好的綜合控制性能,可有效解決艦載機在執行器故障情況下的精準著艦難題。
4 結 論
為了實現執行故障情況下艦載機的準確、快速降落,本文設計了一種艦載機容錯著艦控制系統。該系統采用自回歸模型對甲板運動進行預測,并設計了一種艦載機著艦導引律,以實現著艦導引快速跟蹤,提出了一種基于干擾觀測器的快速終端積分滑模控制器,可有效解決具有未知擾動和故障的艦載機跟蹤問題。采用李雅普諾夫函數對艦載機著艦導引和艦載機容錯控制部分分別進行了理論分析,證明了閉環系統的跟蹤誤差一致有界。最后,通過系列數值仿真實驗,驗證了本文所設計系統的魯棒性、準確性和快速性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2016年10期)2016-07-10 08:17:41