軟體機器人研究現狀及展望
2022-11-02 05:40:28馮顯英
現代制造技術與裝備 2022年9期
關鍵詞:設計
董 效 馮顯英
(1.山東大學 機電信息與工程學院,威海 264209;2.山東大學 機械工程學院,濟南 250061)
隨著人們生活水平的不斷提高,機器人學和自動控制技術不斷發展,使得機器人技術開始廣泛應用于工業制造、醫療救助、科研和救災搶險等各個方面。近年來,隨著仿生技術的發展和新型復合材料的興起,軟體機器人快速發展,并逐漸應用于各個領域。新型復合材料的優勢是可以以3D打印的方式來制作,節約了時間,降低了成本。軟體機器人憑借在機體上的優勢,可以適用于各種復雜環境,如醫療、軍事及探測領域,且受到外界沖擊后不會產生大的傷害。基于軟體機器人技術,機器人的應用領域不斷拓展。
1 研究現狀
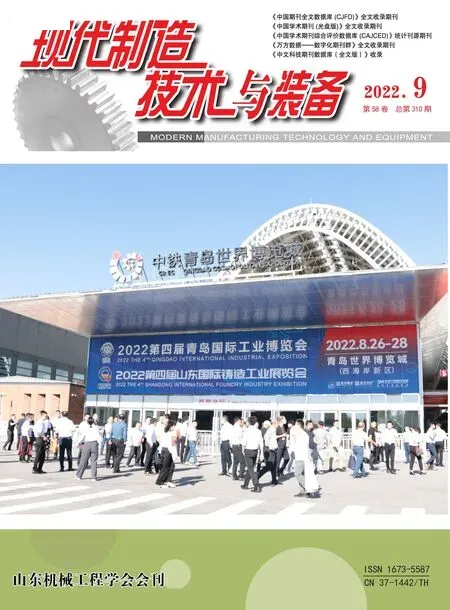
目前的軟體機器人主要由新型智能復合材料構成,依靠自身結構柔軟、韌性高、形變大的特點實現運動,理論上具有無限多自由度[1]。加州大學圣地亞哥分校的CHRISTIANSON教授依據章魚的運動方式,設計了一種通過形狀改變實現循環噴進的頭足類軟體機器人,如圖1(a)所示[2]。通過改變機器人的內部體積和橫截面積,利用噴射推進和附加質量效應,實現可重復噴射推進。來自中國科學技術大學的FAN等人依據青蛙跳躍的運動方式,設計了一種關節采用氣動鉸接式軟驅動器的蛙式游泳軟驅動器,如 圖1(b)所示[3]。通過對蛙類生物結構和肢體運動特性的研究,在運動學模型的基礎上建立了機器人肢體運動原理圖,并通過組合控制系統確定了設計方案,從而實現了蛙式游泳機器人的小型化,有效減小了水下軟體機器人的質量和體積,使其在水下環境的多重障礙物之間也能自由穿梭。軟體機器人的研究不僅可以應用于海洋探索和環境監測,還可以應用于醫療領域。上海交通大學的鄧韜等人設計了用于心臟微創手術的軟體機器人,如圖1(c)所示[4]。該機器人的設計靈感源于大象鼻子的生理結構,材料選用了無毒無污染的醫用硅膠材料,可安全融入病人的身體。
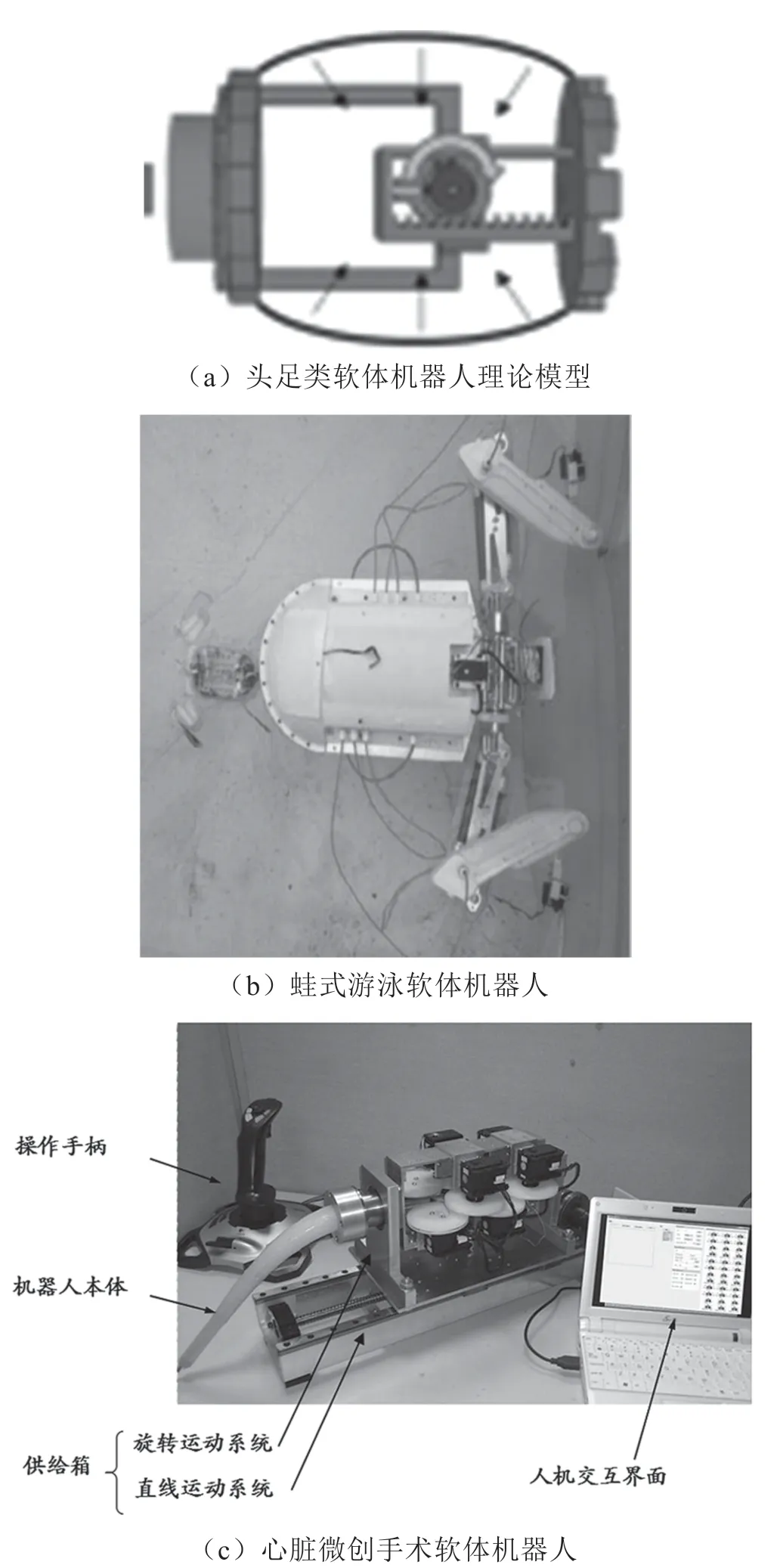
圖1 不同類型的軟體機器人
2 驅動方式
雖然軟體機器人具有無限自由度[1],應用十分靈活,可以更好地適應各種環境,但是所能配備的驅動器數目十分有限,被稱為驅動機器人。
2.1 氣動驅動
氣動軟體機器人是指在機器人的軟體結構中充氣,利用氣壓使結構產生形變推動軟體機器人運動。MARCHESE等人受到魚運動時擺尾的啟發,借助LAUDER等人研究的柔性箔[5-6],發明了一種利用氣體彈性驅動器擺動的軟體機器魚[7],如圖2所示。他們在軟體魚尾的兩側設置了兩條氣體通道,當將CO2通入這兩條氣體通道時,通道會發生膨脹,從而使魚尾發生彎曲,實現機器人在水中的游動。
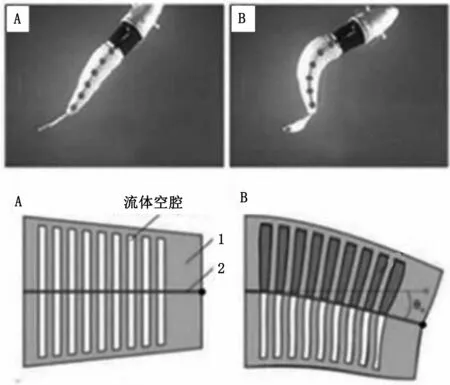
圖2 氣動驅動的軟體機器魚
2.2 液壓驅動
液壓驅動是通過在柔韌性極好的軟體機器人中增添流體通道或在特殊位置添加具有限制作用的限制層材料[8],通過控制變形實現軟體機器人的跳躍、爬行以及翻轉等基本運動。KATZSCHMANN等人在氣壓驅動的軟體機器魚的基礎上研究了一種液體循環驅動的軟體機器魚[9],如圖3所示。該機器魚設計了特殊的閉環液體流通渠道,通過齒輪裝置操控水在兩個驅動通道內的循環流動,為魚的推進和轉向運動提供 動力。

圖3 液壓驅動的材料與軟體機器魚
2.3 SMA驅動
形狀記憶合金(Shape Memory Alloy,SMA)是一種利用熱彈性的智能合金材料。馬氏體相變和逆變,加熱時可以恢復原始形狀,因此具有形狀記憶效應。形狀記憶合金的相變由兩種相構成,即奧氏體相和馬氏體相。上海交通大學的王緒等人設計的仿尺蠖蠕動模塊化軟體機器人正是一種新型SMA驅動的軟體機器人[10]。如圖4所示,他們設計的軟體機器人的結構由4個球狀模塊和前后腹足組成。模塊1和模塊4分別為頭和尾巴,模塊3和模塊4充當軀干部分。通過球型模塊膨脹收縮帶來的形變,配合軟體腹足的吸附和脫離,實現了該軟體機器人在環境中的運動。
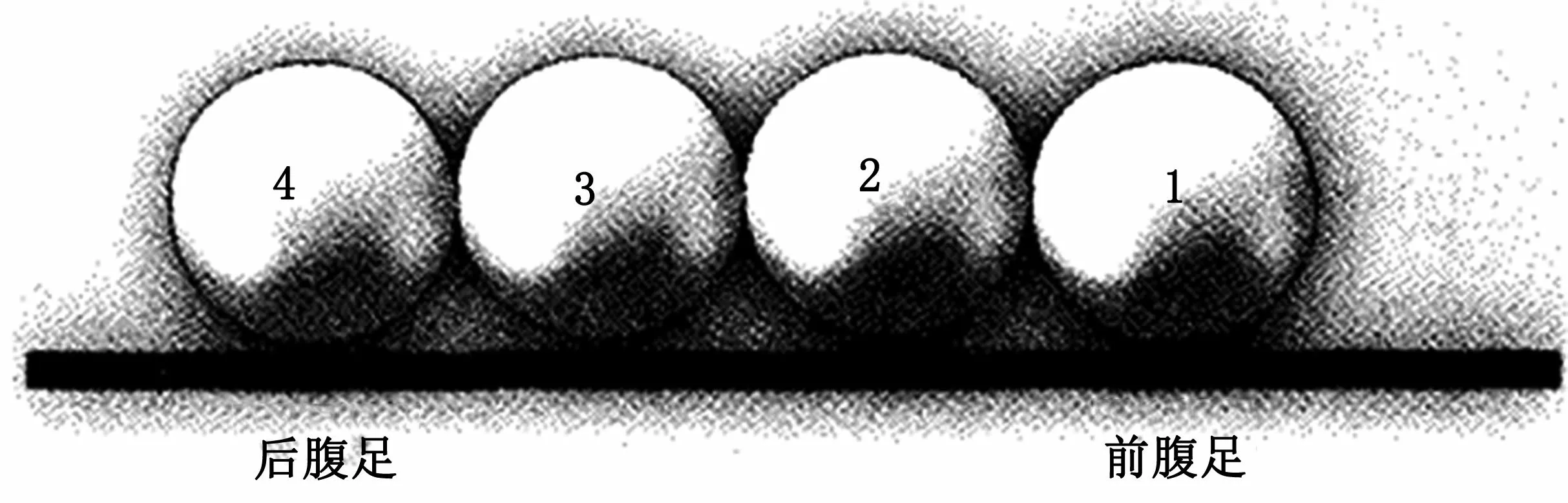
圖4 仿尺蠖蠕動模塊化軟體機器人
2.4 EAP驅動
電活性聚合物(Electro-Active Polymer,EAP) 是近年發展迅速的柔性復合材料。它可以在外加電場的作用下,通過改變材料內部結構產生膨脹、收緊、彎曲等各種力學形變。它一般分為電子型EAP和離子型EAP兩大類[11]。電子型EAP的驅動需要高達kV的電壓,而離子型EAP在較低電壓的刺激下即可發生力學變形[12]。美國麻省理工學院的DUBOWSKY教授設計的EPA驅動的彈跳機器人[13],采用介電型EAP驅動,大大減少每次彈跳消耗的能源,且質量僅有30 g,具有體積小、質量輕的優點。目前,機器人的彈跳高度約為10 cm,希望未來可以應用于火星探測。
2.5 磁流變材料驅動
磁流變材料是一種新發明的智能復合材料[14]。它的彈性模量可隨外加磁場強度的變化而變化,進而實現收縮、膨脹以及彎曲等運動。NISHIDA等人利用最新的磁流變液材料設計了—種新型機器人抓手[15],如圖5所示。通電電磁鐵產生磁場,利用磁性粒子產生的極化效應和磁場作用,改變機器人抓手的彈性模量進行伸長與收縮實現夾取。

圖5 磁流變材料與其構成的機器人抓手
2.6 其他驅動
山東大學馮顯英等人設計了一種絲驅動連續體機械臂[16],如圖6所示。這種高靈活性和安全性的機械臂可以解決傳統離散機械臂無法適用于狹窄擁擠的體內環境的問題,拓寬了機械臂的適應范圍。上面介紹的驅動方式都是物理驅動,本質是通過外力改變材料的物理性能,實現伸縮、彎曲等變形完成運動。化學反應驅動是指通過化學反應產生的驅動,即利用化學反應產生的巨大能量實現機器人的運動。Octobot是由美國哈佛大學WEHNER等人研發的能自動運動的軟體機器人,通過在孔道注入過氧化氫溶液,配合機器人體內的鉑催化劑發生化學反應釋放大量氣體,使通道膨脹發生變形,從而驅動機器人實現運動[17]。此外,該團隊使用同樣的驅動方式研制了一種彈跳機器人[18],采用C4H10和O2反應產生的大量熱量進行爆破驅動。
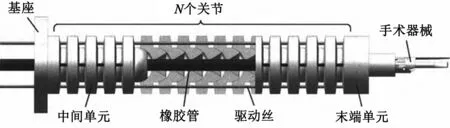
圖6 連續體機械臂設計
3 關鍵問題與突破點
表1總結了軟體機器人的關鍵問題,主要包括能源高效利用、控制動作精度以及運動學實際建模等。軟體機器人在理論上存在無限的自由度,但是自由度與驅動器之間并不是簡單的一對一線性關系,因此難以實現精確建模,且控制精度較低。此外,軟體機器人目前急需研發污染小、能耗低、韌性高甚至可多次回收利用的智能軟材料。研究開發面向軟體機器人的傳感器控制裝置對推動軟體機器人的發展起到了重要作用,有利于實現人機交互技術。
表1 器人的關鍵問題
本文對未來軟體機器人的突破點提出了4點建議。第一,研究新型智能材料。目前,用于軟體機器人的無毒無污染的軟體材料極為短缺,導致軟體機器人難以廣泛應用于實踐和實驗研究。因此,科學家必須研究制造新的活性材料為軟體機器人的應用提供多方面選擇。第二,優化建模技術。由于軟體機器人的自由度與驅動器并不是簡單的一對一關系,難以保證軟體機器人物理模型的精確度。因此,建模時需要考慮多耦合問題,在確保精度的基礎上進一步優化設計。第三,優化傳感器控制技術。多自由度的軟體機器人實際上并不可以直接觀察或者控制,并且目前軟體機器人的控制方法只是簡化的模型,不能保證理論上無限自由度的控制,因此必須優化軟體機器人的傳感器及其控制技術。第四,優化人機交互技術。在未來的研究中需要將更多精力集中在軟體機器人的輸入和反饋設備的硬件和軟件設計上,從而更好地實現人機交互技術,便于人們進行 控制。
4 總結與未來展望
目前,軟體機器人的研究正處于起步階段,以生物模仿和實驗為主。雖然短期內無法大規模應用軟體機器人,但是已經出現許多仿生動物的軟體機器人。軟體機器人不僅可以用于探索未知環境、監控環境變化、抓取物品,還可以應用于醫療手術、探索外太空等。但是,現在發展軟體機器人所需的智能材料比較短缺,人們需要在實驗的基礎上進一步優化建模技術和傳感器控制技術,加強控制精度,實現人機交互。目前,軟體機器人相較傳統剛性機器人,最大的優勢在于韌性好、體積小,可以適應非結構化的復雜環境。未來軟體機器人將在重災區探險救、醫療手術與人體骨骼補充甚至外太空探索等方面為人們提供極大助力,成為人們日常生活中不可或缺的一部分。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04