隧道圍巖結構變形自動監測系統開發與應用
2022-10-27 10:25:34夏寶前王列偉石崢映黃友群連捷
鐵路技術創新 2022年3期
夏寶前,王列偉,石崢映,黃友群,連捷
(南京派光智慧感知信息技術有限公司,江蘇 南京 210019)
1 概述
我國隧道施工經驗和監控量測數據表明,在圍巖隧道仰拱和下臺階開挖時,受初期支護尚未閉環及開挖擾動等因素影響,較易產生較大沉降或收斂突變,甚至造成關門塌方。在建隧道掘進方式主要有鉆爆和盾構2種。盾構方式主要用于地鐵隧道建設,刀盤掘進、運渣、貼管片、鋪設軌道同時進行,結構相對穩定,成本較高。鐵路隧道鉆爆法建設,先在掌子面進行爆破,爆破后立工字鋼梁并澆筑水泥成為初期支護;初期支護區域的變形速率較大,極易發生隧道沉降、收斂等病害,需實時監測形變[1-2]。
目前鐵路隧道監控量測方法包括傳統基于全站儀[3-4]、基于激光測距[5]和基于三維激光掃描的方法[6-9]等。其中全站儀監控量測方法一般需配合水準儀、收斂儀等實現監測隧道的凈空收斂、拱頂沉降等。受采集手段的限制,基于全站儀的隧道監控量測方法存在采集速度慢、采集時間間隔長、采集點數據量少等缺點,不能全面反映隧道真實情況等缺陷。許定倫等[5]采用的基于激光測距的方法是一種自動連續監控量測方法,但基于激光測距的變形測量原理僅支持定點結構變形數據的采集。
隨著三維激光掃描儀技術的發展和進步,其在精細三維數據建模方面具有數據精度高、采集速度快的優勢,已被逐步應用到工程測量的多個領域。趙麗鳳等[6]將移動三維激光測量技術應用于地鐵隧道結構監測,提出一套適用于隧道結構和病害監測的硬件集成方案,研發一套獲取地下空間結構三維幾何特征的方法。秦炳權[7]通過三維激光掃描技術對地鐵隧道進行變形監測,對點云數據進行處理,分析整體隧道狀態。目前三維激光測量法存在設備成本高、受施工影響較大等問題,在鉆爆法施工的隧道中應用尚需在結構或硬件方面進一步改進提升。
通過上述分析,針對目前鐵路隧道監控量測,需研發一種隧道結構變形自動監測系統和方法,能夠方便同時在運營隧道和在建隧道中部署,不需在隧道頂部安裝設備,并能夠實時不中斷地監測隧道全斷面結構形變,及時發現隧道結構變形、實時跟蹤結構變形趨勢,在有較大結構變形發生時能夠及時發出預警,且測量設備需同時具備安裝方便、受隧道施工影響小等特點。通過實時監測數據的采集和積累,研究地質情況、施工方法、施工參數等與初支變形間的相關關系,為確定變形報警限值提供參考,可為后續施工工藝、工法的改進及預留變形量等提供數據支撐。
2 隧道圍巖結構變形自動監測系統研究
針對傳統在建隧道圍巖變形測量的確定,設計隧道圍巖結構變形自動監測系統(Tunnel Construction Monitoring System,TCMS)。TCMS由監測主站和監測終端組成,通過將隧道斷面監測終端安裝在掌子面及初期支護側壁,在隧道圍巖斷面形成多條完整監測光帶,對掌子面和側壁斷面結構變形進行監測,并在二次襯砌穩定區域側壁安裝參考監測終端,形成穩定的參考點線基準;通過在仰拱閉合區或二次襯砌區安裝的分析控制主站,同時對監測光帶和參考光帶進行非接觸式智能分析和測量,實現隧道圍巖變形的實時不間斷監測。監測主站和終端在隧道監測區域的布置示意見圖1。
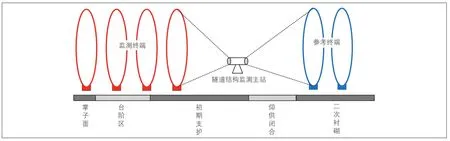
圖1 監測主站和終端在隧道監測區域的布置示意圖
2.1 變形計算原理
安裝于隧道被測量斷面的終端可發射覆蓋隧道全斷面的線結構光,系統通過結構光圖像采集和分析對比,計算被測量斷面的變形量。結構光圖像數據處理單元利用圖像識別算法定位結構光區域及其邊緣。算法首先通過自適應閾值處理方式定位結構光區域,利用深度學習分割網絡識別區域內線結構光邊緣,分割網絡優選語義分割模型。
線結構光的光線在圖像中有一定寬度,需提取線結構光曲線中心線代表結構光每個坐標點的位置,采用重心法進行光線中心提取,在預設的結構光區域內使用OSTU法計算閾值T,然后將閾值與結構光每個像素點灰度值進行比較,尋找大于閾值T的像素及坐標,進行加權平均得到光線中心坐標:
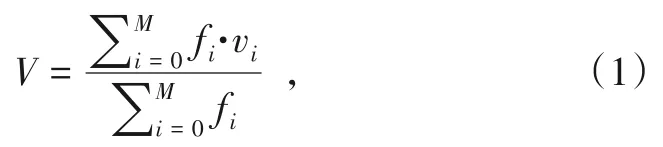
式中:fi為大于閾值T的結構光點像素的灰度值;vi為所有大于閾值T的結構光點的像素坐標;M為大于閾值T的像素個數。
得到結構光心位置后即可進行前后比對,由于被監測斷面通常位于結構不穩定區域,監測終端本身存在位置變動的可能,為消除監測終端自身位移的影響,系統設計具備圓形靶點光源的終端,通過計算圓形靶點中心水平方向和豎直方向的位移,獲取終端自身位移量,并在計算隧道截面變形時予以補償。
隧道數據處理單元監測隧道結構狀態,區分是否發生隧道單截面沉降、收斂,多截面整體沉降等病害。優選區域偏移差值算法,檢測方法如下:
(1)劃分隧道壁區間,分為左右側壁和拱頂部分,左右側壁檢測橫向和縱向位移,拱頂檢測縱向位移。隧道拱頂、側壁區域劃分示例見圖2。
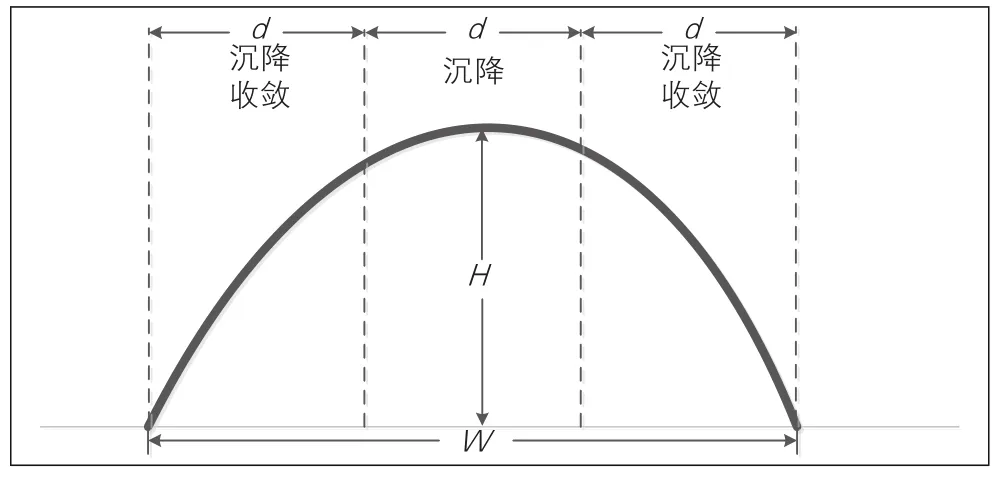
圖2 隧道拱頂、側壁區域劃分示例
(2)實時線結構光曲線中心線與基準線匹配,優選差值計算算法,比較掩碼圖不同區間基準線前后像素偏差,逐個比較像素橫向或縱向位移變化,每段區間內圖像像素的差值作為1個序列,采用多項式平滑(SG)[10]濾波對差值序列進行平滑,多項式平滑濾波是移動窗口的加權平均算法,普通的滑動窗口平滑算法為:

式中:xk,smooth為元素xk平滑后的值;w為窗口大小;xk+i(i∈(-w,w))為序列窗口內的元素值。
而多項式平滑濾波是卷積平滑,基于最小二乘法原理對數據進行擬合。隧道拱頂沉降及周邊收斂計算示例見圖3。
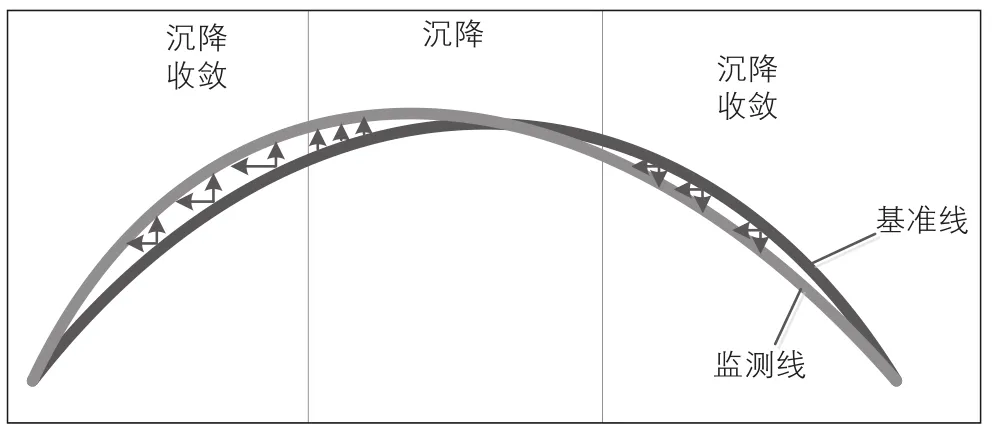
圖3 隧道拱頂沉降及周邊收斂計算示例
(3)隧道多截面整體沉降監測,優選組合線差異算法,結合隧道前后多條線結構光曲線中心線匹配結果,其中1條或多條整體下移為隧道多截面整體沉降病害。
(4)沉降量空間映射,通過像素量化將像素位移轉換為空間偏移距離,獲得實際沉降量,并根據位移方向對應病害類型。
2.2 系統工作模式
(1)在隧道初期支護區側壁按固定間隔(5 m)安裝1臺斷面監測終端,安裝高度為3 m(適當提高安裝位置,減少作業設施遮擋),各斷面監測終端盡量保持在同一水平面上。
(2)在隧道穩定區域(二次襯砌區)側壁適合觀測位置安裝參考斷面監測終端,保證采集終端可以觀測到。
(3)在隧道穩定區域(仰拱或二次襯砌)側壁安裝主站,該主站與斷面監測終端及參考斷面監測終端盡量保持同一水平面附近,與監測終端及參考終端最遠距離不超過50 m(典型配置,可定制),保證觀測效果;超出監測距離的采用級聯從站的方式。
3 試驗結果分析
通過設計專用的標定實驗臺模擬環境,對自動監測功能和性能進行試驗檢測,并在相關鐵路項目中進行了長期使用測試,根據現場工況,解決了設備防塵、爆破防護、工程車遮擋等問題對TCMS的影響。
3.1 產品功能檢測
為測試TCMS的精度和可靠性,設計了標定檢測系統,該系統由標定工裝及附屬控制系統組成,在拱頂、側壁S1、側壁S2處安裝標定工裝,安裝示意見圖4,標定檢測系統具有如下功能:
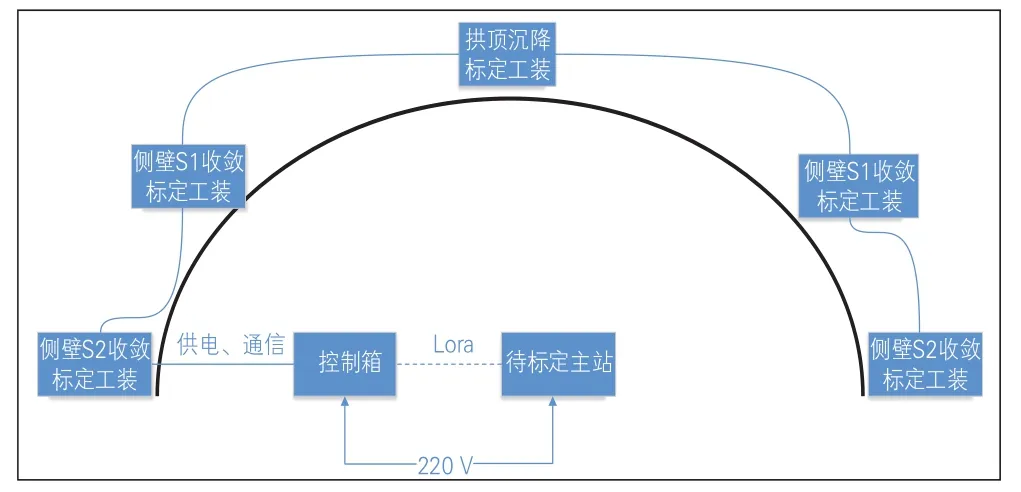
圖4 設備標定檢測系統安裝示意圖
(1)標定工裝模擬拱頂沉降、側壁收斂;
(2)將標定工裝的模擬沉降/收斂數據、TCMS自動監測結果進行比對,驗證TCMS測量結果的精度及可靠性;
(3)根據標定結果,對TCMS進行自動校準。
分別將測量主站安裝于距離工裝19.8、33.5、60.0 m處,對TCMS的拱頂沉降和側壁收斂測量精度進行測試,測試時將標定工裝分別移動10、50、100 mm,由TCMS觀測并記錄測量值和測量誤差。TCMS對拱頂沉降和側壁收斂的測試結果見表1、表2,其中給定位移量為標定工裝的位移量,測量值為自動測量系統測得的位移值,經統計TCMS拱頂沉降和側壁收斂誤差在±1.5 mm以內。

表1 TCMS拱頂沉降測量精度檢驗結果 mm

表2 TCMS側壁S1位置收斂測量精度檢驗結果 mm
3.2 隧道測量測試結果
TCMS在麗香鐵路長坪隧道、花椒坡隧道和張吉懷高鐵新華山隧道等項目施工中進行了長期的使用測試,以某施工環境較復雜艱險隧道為例進行結果分析。2021年6月29日—7月12日,監測該隧道DK3+610拱頂沉降、側壁收斂情況,對全站儀測量數據和TCMS測量數據進行對比分析,總結2個測量系統的趨勢相關性及TCMS的測量準確性。
(1)DK3+610拱頂沉降TCMS測量結果。2021年7月7日22:41:24—12日14:49:43,共測量35次,拱頂沉降測量數據隨時間變化趨勢見圖5。
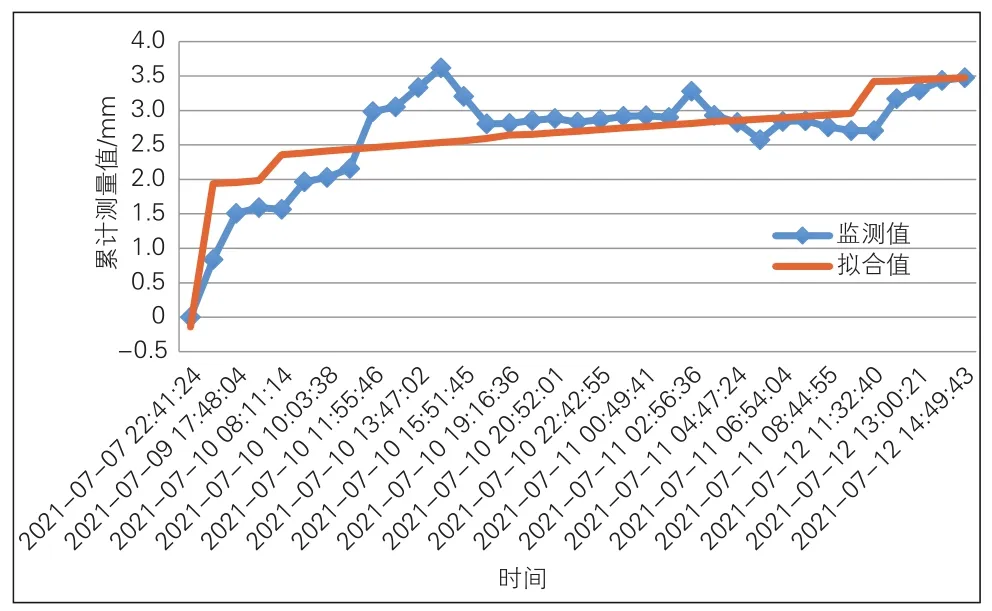
圖5 TCMS測量拱頂沉降數據隨時間變化趨勢
(2)DK3+610拱頂沉降全站儀測量結果。高精度全站儀在2021年6月26日—7月11日共測量30次,拱頂沉降測量值隨時間變化趨勢見圖6。
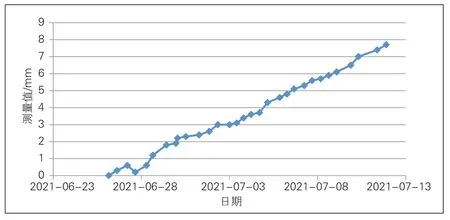
圖6 全站儀測量拱頂沉降數據隨時間變化趨勢
經對比分析,2021年7月7日16:28:39—11日08:44:50,全站儀測量拱頂累積沉降2.1 mm(7.4-5.6=2.1 mm);2021年7月7日22:41:24—11日08:44:55,TCMS測量拱頂累積沉降2.761 mm。拱頂累積沉降量二者測量結果差值為0.661 mm。且在此時間段內,TCMS測量次數為30次,全站儀測量次數為8次,補全了全站儀2次測量間隔之間的數據,為隧道結構變形預測提供了豐富數據。
4 結束語
針對隧道建設過程中全站儀監測方式存在監測間隔時間長、不能實時監測,以及作業風險大、勞動強度大、人員因素影響大等缺點研制隧道圍巖變形全自動、實時監測系統。TCMS兼備全站儀監測方式的原理性優點,同時具有全自動智能分析、連續實時監測、無需安裝反光棱鏡、全斷面監測測點多、設備無線通信電池供電、易拆卸安裝等明顯優勢。TCMS部署方便,排除人為因素干擾,實時有效監測突發安全風險。經研發及試驗驗證,并在相關重大鐵路隧道項目施工中進行了長期使用測試,解決了設備防塵、爆破防護、工程車遮擋等問題對自動監測系統的影響,與傳統全站儀測量方式相比,TCMS測量數據實時、豐富且趨勢準確,可對隧道頂部沉降、周邊收斂、局部沉降、整體沉降等病害進行測量,并在隧道有較大變形時及時發出預警。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
電測與儀表(2016年9期)2016-04-12 00:29:52
